THE ANALYSIS OF GAUGE REPEATABILITY AND REPRODUCIBILITY WITH INTERACTION BETWEEN OPERATORS
advertisement

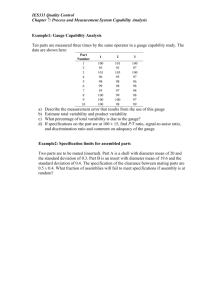
THE ANALYSIS OF GAUGE REPEATABILITY AND REPRODUCIBILITY WITH INTERACTION BETWEEN OPERATORS AND PARTS JENG-JUNG FANG Department of Management and Information Technology Southern Taiwan University of Technology 710 Yung-Kung City, Tainan County, Taiwan PENG-SEN WANG Department of Management and Information Technology Southern Taiwan University of Technology 710 Yung-Kung City, Tainan County, Taiwan The purpose of the research is to improve the analysis of the measurement system nowadays. The current measurement system usually utilizes the method of the analysis of variance (ANOVA) to analyze the measurement system while there is interaction between the parts and operators. There are other methods can be used to analyze the measurement systems such as Classical GR&R and Long Form methods. Although the two methods are easy in calculation, they are not suitable to analyze the measurement system while there is interaction between parts and operators. The research modified the two methods to make them suitable to the cases no matter there is interaction between parts and operators or not. In the mean time, the research also compared the gauge variance estimators of five different estimation methods by simulating a measurement system based on the criterions of the biasness, variance, and mean squares error (MSE) of the gauge variance estimate. The research verified that the Modified Long Form method developed in the research gives smaller MSE and variance of gauge variance estimator both in the cases of with interaction and without interaction even though it gives biased estimator of the gauge variance. Keywords: Gauge Analysis, Repeatability, Reproducibility, Interaction Introduction Due to the rapid development of the high-tech industry and the requirement of the high quality from the customers, the need of accuracy and precision on the measurement system is highly demanding. A gauge must be sufficiently capable to measure product accurately enough and precisely enough so that the analyst can make the correct decision. In the QS 9000 quality assurance system, the analysis of repeatability and reproducibility of the measurement variation is to apply the verified measurement system to the measurement process. Most of the industries apply the QS 9000 criterions to judge the acceptance of their measurement systems. 1 2 Tsai (1988) defined the gauge reproducibility as the variability due to different operators using the same gauge and the gauge repeatability as the variability reflecting the basic precision of the gauge itself. The gauge variability is composed of the gauge reproducibility and the gauge repeatability. The variance components of the total observed variability includes both the part variability and gauge variability. The random effects model used for analyze a measurement system is presented as i 1, 2, ..., n; j 1, 2, ..., p; k 1, 2, ..., k Yijk Pi O j POij Rijk (1) The Yijk is the kth repeated measurement on the ith part by the jth operator. is the process average. Pi is the ith part effect. Oj is the jth operator effect. POij is the interaction between the ith part and the jth operator. Rijk is the error term. The source of variation can be divided into four components which are parts, operators, interaction between parts and operators, and the random error term. Pi 、 Oj 、 POij, and, Rijk are random factors normally distributed with mean 0 and constant variances equal to P , 2 2 O2 , PO , and R2 respectively. The effects of parts and operators, the interaction between parts and operators, and the error terms are assumed to be additive. The estimated gauge variance is the sum of variances of repeatability and reproducibility. That is 2 2 ˆ2 ˆ gauge ˆ repeatabil ity reproducibility where and 2 ˆ repeatabil ity = ˆ R2 2 ˆ2 ˆ reproducib ility = O 2 + ˆ PO (2) (3) (4) Methods to Analyze Gauge Variation There are three analysis methods widely used to estimate the components of variance in the gauge system. They are ANOVA, Classical GR&R, and Long Form methods. Tsai (1988) developed the ANOVA method to compute the variance components. Montgomery and Runger (1993a, 1993b) emphasized the repeatability and reproducibility study is equivalent to an experiment designed to estimate certain components of variance. Negative estimate of variance component 2 PO is possible. One method to solve the problem is to set it to zero and recalculate the gauge variance estimate. A reduced model is then fitted and the estimates of repeatability and reproducibility are then adjusted. Barrentine (1991) introduced the control chart tabular methods to estimate the variance components of repeatability and reproducibility. Montgomery and Runger (1993a) called the methods “Classical Gauge Repeatability and Reproducibility Study” (Classical 3 GR&R). The tabular method tabulates the collected data for k equal to 2 as the form of Table 1. The Classical GR&R method estimates repeatability as repeatability R d2 (5) The value d2 depends on the number of repeated measurements taken on the same part by the same operator. Table 1. Tabular Form for the Classical Gauge Repeatability and Reproducibility Study Operator 1 … Operator p Measurements … Measurements Part Number 1 2 x R … 1 2 x R 1 x111 x112 X 11 R11 … x1p1 x1p2 X 1 p R1p 2 x211 x212 X 21 R21 … x2p1 x2p2 X 2 p R2p . . . . . … . . . . n xn11 xn12 X 21 Rn1 xnp1 xnp2 X np Rnp X 1 R1 X p R p Average … The estimator of reproducibility is obtained from the difference R max X j min X j , j = 1, 2, …, p X (6) j j The estimator of reproducibility is ˆ reproducibility R X (7) d2 MSA (1991) reference manual introduced another tabular approach similar to control chart tabular method which is called Long Form method. The estimators of repeatability and reproducibility are computed as ˆ repeatability ˆ reproducibilty = = R R X d2 (8) d2 R d 2 nk 2 2 (9) 4 The repeatability and reproducibility of the three analysis methods are summarized in the Table 2. Table 2. Repeatability and Reproducibility Estimators of Classical GR&R, ANOVA, and Long Form Methods ˆ repeatability Classical GR&R ANOVA Long Form ˆ reproducibility R R d2 X d2 MS O n 1MS PO nMS R nk MS R RX d2 R d2 2 R d 2 nk 2 Other related gauge analysis methods can be found in the articles such as Dolezal (1998), and Burdick and Larsen (2002). Table 3 and Table 4 are the results of gauge variability analysis for measurements without and with interaction between operators and parts respectively. Comparing the results of the two tables, one can observe that Classical GR&R and Long Form methods cannot precisely estimate the gauge variance while there is interaction between parts and operators. Table 3. Repeatability, Reproducibility, and Gauge Variance Estimate for Data without Interaction Between Parts and Operators Classical GR&R Long Form ANOVA ˆ repeatability ˆ reproducibility ˆ gauge 3.783 3.783 2.576 1.418 1.285 3.983 4.039 3.995 4.743 Table 4. Repeatability, Reproducibility, and Gauge Variance Estimate for Data with Interaction Between Parts and Operators Classical GR&R Long Form ANOVA ˆ repeatability ˆ reproducibility ˆ gauge 2.261 2.261 3.506 1.462 1.418 3.863 2.692 2.668 5.216 5 In order to make both Classical GR&R and Long Form Methods suitable to the cases of with interaction between parts and operators, referring to the tabular form in Table 1, we first calculate R X ij max X ij min X ij , i = 1, 2, …, n n R X ij R X ij n i 1 and By replacing R X into R X ij (10) j j (11) in the reproducibility variance estimator of Classical GR&R and Long Form methods, the two methods can be applied to estimate the gauge variance for the cases there are interactions between parts and operators. The modified reproducibility estimator of the two analysis methods are summarized in the Table 5. Table 5. Modified Reproducibility Estimators of Classical GR&R and Long Form Methods ˆ reproducibility Modified Classical GR&R Modified Long Form R X ij d 2 R X ij d2 R d2 nk 2 2 Table 6 shows the values of the repeatability, reproducibility, and total gauge estimate for the five methods of ANOVA, Classical GR&R, Modified Classical GR&R, Long Form, and Modified Long Form based on the same measurements used in Table4. It showed that Modified Classical GR&R and Modified Long Form methods are both much better to estimate the gauge variance than Classical GR&R and Long Form methods while there is interaction between parts and operators. Table 7 shows Modified Classical GR&R and Modified Long Form methods also generate good variance estimates for data without interaction between operators and parts. In summary, the Modified Classical GR&R and Modified Long Form methods are much better than the Classical GR&R and Long Form methods in estimating the gauge variance on either case of with or without interaction between parts and operators. 6 Table 6. Repeatability, Reproducibility, and Gauge Estimate for Data with Interaction Between Parts and Operators ANOVA Classical GR&R Modified Classical GR&R Long Form Modified Long Form ˆ repeatability ˆ reproducibility ˆ gauge 3.506 2.261 3.863 1.462 5.216 2.692 2.261 4.592 5.119 2.261 2.261 1.418 4.579 2.668 5.1062 Table 7. Repeatability, Reproducibility, and Gauge Variance Estimates for Data without Interaction Between Parts and Operators ANOVA Classical GR&R Modified Classical GR&R Long Form Modified Long Form ˆ repeatability ˆ reproducibility ˆ gauge 2.576 3.783 3.983 1.418 4.743 4.039 3.783 1.949 4.255 3.783 3.783 1.285 1.855 3.995 4.213 Comparison Now we will compare the gauge variance estimators of five different measurement methods by simulating a measurement system based on the criterion of the biasness, variance, and mean squares error (MSE) of the gauge variance estimate. We generated the measurements according to the random effects model of equation (1) and calculated the gauge variance estimates of the five methods. Then compare the gauge variance estimates with its true value. The procedure of simulating the measurements is as follows: 1. Choose the values of n, p, and k. 2. Set the values of , 3. 4. Simulate one set of measurements according to the values in step (1) and (2). Compute the gauge variance estimates of the five methods (ANOVA, CRR, LF, MCRR, and MLF). Repeat step (3) and (4) for 10000 times. Calculate the criterion values of each 10000 estimates for comparison. 5. 6. P2 , O , PO , and R2 . 2 2 Criterions for Comparison There are three criteria for comparison. They are MSE, variance, and mean ratio of the gauge variance. 7 The MSE of gauge variance estimator is n (ˆ MSE = i 1 2 gauge 2 gauge )2 (12) n where n is the number of simulation runs. In our example n is equal to 10000. The MSE is a combined index of accuracy and precision of an estimator. The smaller of the MSE value, the better the estimator is. The sample variance of the estimated gauge variance is presented as Equation (13). The smaller of it, the higher precision of the estimator and the narrower width of its confidence interval are. n 2 ˆ gauge n 2 (ˆ gauge ) 2 n i 1 n i 1 2 Var ( ˆ gauge ) = n 1 2 (13) The mean ratio of the estimated gauge variance to its true value is showed as Equation (14). If the ratio is equal to 1, the estimator is then unbiased. n Mean ratio = 2 ˆ gauge i 1 2 gauge n (14) Result of Comparison The research first compared the five methods under various combinations of npk values for the case with interaction between parts and operators. We set process average μ to 0, P2 to 0, 2 2 O2 to 1, PO to 1, and R to 0.25. Ten thousand simulation runs are conducted for various npk values. Sample variance, MSE, and mean ratio of the gauge variance estimates are calculated for each of the five methods. The result of mean ratios of the gauge variance estimates for the five different methods are presented in Table8. It showed that ANOVA method produces unbiased gauge variance estimator. The MCRR method generates overestimated estimator while MLF, CRR, and LF methods generate underestimated estimators. They also revealed MCRR and MLF estimates are much better than those of CRR and LF. Table 9 showed the result of sample variances of gauge variance estimates. The MLF estimate has the smallest variance while the LF estimate is the second smallest. 8 Table 8. Mean Ratios of Gauge Variance Estimates for Various npk Values under the Case with Interaction Between Parts and Operators npk 30 40 60 80 90 ANOVA 0.997 1.005 0.997 0.994 0.998 CRR 0.808 0.764 0.717 0.692 0.800 MCRR 1.153 1.124 1.096 1.098 1.113 LF 0.656 0.661 0.652 0.601 0.652 MLF 0.927 0.965 0.992 0.945 0.898 Table9. Sample Variances of Gauge Variance Estimates for Various npk Values under the Case with Interaction Between Parts and Operators npk 30 40 60 80 90 ANOVA 1.716 2.660 1.302 2.304 1.219 CRR 2.481 6.072 1.985 5.433 1.899 MCRR 2.461 5.033 1.832 4.337 1.710 LF 1.534 2.493 1.227 2.226 1.174 MLF 1.522 2.067 1.132 1.778 1.057 The results of mean square errors (MSE) of the gauge variance estimates are presented in Table10. It showed that MLF method generates the best estimator while considering the accuracy and precision together in spite that MLF estimator is biased. In summary under the interaction between parts and operators, the ANOVA estimator is unbiased while MLF estimate has the smallest variance. The MLF estimator is the best while both accuracy and precision are taken into consideration. The MCRR and MLF methods are much better than CRR and LF methods. Table10. Mean Square Errors (MSE) of the Gauge Variance Estimates for Various npk Values under the Case with Interaction Between Parts and Operators npk 30 40 60 80 90 ANOVA 1.686 1.130 1.389 0.884 1.179 CRR 2.667 1.735 2.442 1.640 2.263 MCRR 2.522 1.525 2.063 1.168 1.711 LF 2.133 1.623 2.076 1.636 2.026 MLF 1.514 1.042 1.259 0.817 1.073 The research also compared the five methods under various combinations of npk values for the case without interaction between parts and operators. Under the case without interaction between parts and operators, ANOVA gauge variance estimator is unbiased as expectation. Both ANOVA and MLF gauge variance estimators about have the same precision. While taking accuracy and precision into consideration together, ANOVA and MLF gauge variance estimators are the best and there is almost no difference between them. 9 Conclusion In this article, we modified both the Classical GR&R and Long Form methods to make them both suitable to either case of with or without interaction between parts and operators. After comparing the five estimation methods (ANOVA, Classical GR&R, Long Form, Modified Classical GR&R, and Modified Long Form methods) by simulating a measurement process and calculating the gauge variance estimates for each method, it showed the Modified Long Form method is a very good choice to estimate gauge variability no matter there is interaction between parts and operators or not. Reference 1. AIAG Editing Group, “Measurement Systems Analysis-Reference Manual (MSA)”, Automotive Industries Action Group, 1991. 2. Barrentine, L. B., Concepts for R&R Studies, ASQC Quality Press, Milwaukee, WI. 3. Burdick, R. K.; Larsen, G. A. and Allen, A. Elizabeth, “Comparing Variability of Two Measurement Process Using R&R Studies,” Journal of Quality Technology, Vol.34, No.1, pp.97-105 2002 4. Dolezal, K. K. and Burdick, R. K. and Birch, N. J., “Analysis of a Two-Factor R&R Study with Fixed Operators,” Journal of Quality Technology, Vol.30, No.2, pp.163170 1998 5. Montgomery, D. C. and Runger, G. C., “Gauge Capability Analysis and Designed Experiments. Part II: Experimental Design Models and Variance Component Estimation”, Quality Engineering, Vol.6, No.2, pp.289-305 1993a 6. Montgomery, D. C. and Runger, G. C., “Gauge Capability Analysis and Designed Experiments. Part I: Basic Methods”, Quality Engineering, Vol.6, No.1, pp.115-135 1993b