Analysis of Accumulator Response to an
advertisement

Analysis of Accumulator Response to an
External Force acting on a Hydraulic Actuator
by
Leonid Simkin
An Engineering Project Submitted to the Graduate
Faculty of Rensselaer Polytechnic Institute
in Partial Fulfillment of the
Requirements for the degree of
MASTER OF ENGINEERING
Major Subject: Mechanical Engineering
Approved:
_________________________________________
Ernesto Gutierrez-Miravete, Project Adviser
Rensselaer Polytechnic Institute
Hartford, Connecticut
(For Graduation May 2012)
i
© Copyright 2012
by
Leonid Simkin
All Rights Reserved
ii
CONTENTS
Numerical Method Analysis of the Response of an Accumulator to an Impulse Force in a
Hydraulic System.......................................................................................................... i
LIST OF TABLES ............................................................................................................. v
LIST OF FIGURES .......................................................................................................... vi
LIST OF SYMBOLS ....................................................................................................... vii
ACKNOWLEDGMENT ................................................................................................ viii
ABSTRACT ..................................................................................................................... ix
1. Introduction.................................................................................................................. 1
2. Methodology ................................................................................................................ 3
2.1
Assumptions ....................................................................................................... 4
2.2
Accumulator Behavior Modeling....................................................................... 4
2.3
2.4
2.2.1
Accumulator Initial Conditions .............................................................. 5
2.2.2
Accumulator Behavior Equations .......................................................... 5
Actuator Behavior Modeling ............................................................................. 7
2.3.1
Actuator Initial Conditions..................................................................... 8
2.3.2
Actuator Behavior Equations ................................................................. 8
Complete Hydraulic System Behavior Modeling .............................................. 9
2.4.1
Hydraulic System Initial Conditions ...................................................... 9
2.4.2
Hydraulic System Behavior Equations ................................................ 10
2.5
Euler Method .................................................................................................... 11
2.6
Runge-Kutta Method ........................................................................................ 11
2.7
FLOWMASTER Method ................................................................................. 11
3. Results and Discussion .............................................................................................. 14
3.1
Comparison of Accumulator Behavior ............................................................ 14
3.1.1
Model Comparisons for h= 0.05 .......................................................... 15
3.1.2
Model Comparisons for h= 0.005 ........................................................ 15
iii
3.2
3.1.3
Model Comparisons for h= 0.0005 ...................................................... 17
3.1.4
Model Comparisons for h= 0.00005 .................................................... 18
3.1.5
Discussion of Accumulator Behavior Results...................................... 20
Comparison of Complete Hydraulic System Behavior .................................... 20
3.2.1
Model Comparisons for h= 0.05 .......................................................... 21
3.2.2
Model Comparisons for h= 0.005 ........................................................ 22
3.2.3
Model Comparisons for h= 0.0005 ...................................................... 24
3.2.4
Model Comparisons for h= 0.00005 .................................................... 25
3.2.5
Discussion of Hydraulic System Behavior Results .............................. 27
4. Conclusion ................................................................................................................. 28
4.1
Suggestions for Further Research .................................................................... 29
5. References.................................................................................................................. 30
Appendices ...................................................................................................................... 32
A. Input Variables for Accumulator Simulation ............................................................ 32
B. Differential Equations for Accumulator Behavior .................................................... 33
C. Accumulator Behavior Simulation using Euler Method ........................................... 34
D. Accumulator Behavior Simulation using Runge-Kutta Method ............................... 34
E. Accumulator Behavior Simulation using FLOWMASTER ...................................... 36
F. Input Variables for Hydraulic System Simulation..................................................... 37
G. Differential Equations for Hydraulic System Behavior............................................. 37
H. Hydraulic System Behavior Simulation using Euler Method.................................... 38
I. Hydraulic System Behavior Simulation using Runge-Kutta Method........................ 39
J. Hydraulic System Behavior Simulation using FLOWMASTER .............................. 41
iv
LIST OF TABLES
Table A-1: Input Variables for the Accumulator Simulation ......................................... 32
Table E-1: FLOWMASTER Accumulator Simulation Component 1: Air Vessel ......... 36
Table E-2: FLOWMASTER Accumulator Simulation Component 2: Rigid Pipe ......... 36
Table F-1: Input Variables for the Hydraulic System Simulation .................................. 37
Table J-1: FLOWMASTER Hydraulic System Simulation Component 1: Single-Rod
Double-Acting Cylinder ................................................................................................. 42
Table J-2: FLOWMASTER Hydraulic System Component 2: Rigid Pipe .................... 42
Table J-3: FLOWMASTER Hydraulic System Component 4: Air Vessel .................... 42
v
LIST OF FIGURES
Figure 2-1: Hydraulically Driven Suspension System with Accumulators [6] ................. 3
Figure 2-2: Typical Piston-Type Accumulator [9] ............................................................ 5
Figure 2-3: Piston-Type Accumulator Schematic ............................................................. 5
Figure 2-4: Hydraulic Actuator Schematic ........................................................................ 8
Figure 2-5: Hydraulic System Schematic .......................................................................... 9
Figure 2-6: FLOWMASTER Accumulator Simulation Graphic..................................... 13
Figure 2-7: FLOWMASTER Hydraulic System Simulation Graphic ............................. 13
Figure 3-1: Accumulator Piston Behavior Comparison – h=0.005 ................................. 16
Figure 3-2: Accumulator Gas Pressure Comparison – h=0.005 ...................................... 16
Figure 3-3: Accumulator Piston Behavior Comparison – h=0.0005 ............................... 17
Figure 3-4: Accumulator Gas Pressure Comparison – h=0.0005 .................................... 18
Figure 3-5: Accumulator Piston Behavior Comparison – h=0.00005 ............................. 19
Figure 3-6: Accumulator Gas Pressure Comparison – h=0.00005 .................................. 19
Figure 3-7: Hydraulic System: Accumulator Piston Comparison – h=0.05 .................... 21
Figure 3-8: Hydraulic System: Gas Pressure Comparison – h=0.05 ............................... 22
Figure 3-9: Hydraulic System: Accumulator Piston Comparison – h=0.005 .................. 23
Figure 3-10: Hydraulic System: Gas Pressure Comparison – h=0.005 ........................... 23
Figure 3-11: Hydraulic System: Accumulator Piston Comparison – h=0.0005 .............. 24
Figure 3-12: Hydraulic System: Gas Pressure Comparison – h=0.0005 ......................... 25
Figure 3-13: Hydraulic System: Accumulator Piston Comparison – h=0.00005 ............ 26
Figure 3-14: Hydraulic System: Gas Pressure Comparison – h=0.00005 ....................... 26
Figure A-1: Bore Size 125 mm, Model AP-10 Dimension (Reference [14]) ................. 33
Figure C-1: Print Screen of Spread Sheet using Euler Method with h=0.005................. 34
Figure D-1: Print Screen of Spread Sheet using Runge-Kutta Method with h=0.005 ... 36
Figure H-1: Print Screen of Spread Sheet using Euler Method with h=0.005 ............... 39
Figure I-1: Print Screen of Spread Sheet using Runge-Kutta Method with h=0.005 ..... 41
vi
LIST OF SYMBOLS
𝐴𝑐𝑦𝑙 …..……. Area of the hydraulic actuator piston (m2)
𝐴𝑝 ………….
Area of the accumulator piston (m2)
𝐴𝑟𝑜𝑑 …..……
Area of the hydraulic actuator rod (m2)
ℎ …………… Time step interval (s)
𝐿 …………… Length/ height of the accumulator (m)
𝑚𝑐𝑦𝑙 ………..
Mass of actuator piston and attached component (kg)
𝑚𝑝 …………
Mass of the accumulator piston (kg)
𝑃𝑎𝑡𝑚 ……….
Atmospheric Pressure (Pa)
𝑃𝑔 …………..
Pressure of the gas in the accumulator (Pa)
𝑃𝑙 …………… Pressure of the liquid (Pa)
𝑄𝑎𝑐𝑐 ……......
Flow rate into the accumulator (l/s)
𝑄𝑐𝑦𝑙 ……......
Flow rate out of the actuator (l/s)
𝑠 …………… Length/stroke of the linear actuator (m)
𝑡 ……………
Time (s)
𝑉𝑔 …………..
Volume of gas in the accumulator (l)
𝑉𝑔′ …………..
Change in volume of gas in the accumulator (l/s)
𝑥 …………… Position of the actuator piston (m)
𝑥 ′ …………..
Velocity of the actuator piston (m/s)
𝑥 ′′ ………….
Acceleration of the actuator piston (m/s2)
𝑦 …………… Position of the accumulator piston (m)
𝑦 ′ …………..
Velocity of the accumulator piston (m/s)
𝑦 ′′ ………….
Acceleration of the accumulator piston (m/s2)
𝛾 …………… Ratio of specific heat
(l-liter, m-meter, s-second)
vii
ACKNOWLEDGMENT
I would like to thank my advisor, Professor Ernesto Gutierrez-Miravete, whose constant
reminders and strict schedule helped me complete my project. I would like to thank my
family and friends whose constant questioning motivated me to continue working. I
would also like to thank my supervisor, who allowed me the flexibility to change my
work schedule so that I can finish my project.
viii
ABSTRACT
Pressure transient can occur in piping system due to many different abnormal system
conditions. In a hydraulic system, one such condition that can cause a pressure transient
is the action of an external force on an actuator in the system. An example where this
type of transient can occur is in mechanical shocks of hydraulically operated suspension
system for a dump truck. A proven method to suppress this type of pressure transient is
to incorporate an accumulator into the system near the actuator. This project outlined a
numerical approach for analyzing the response of such an accumulator affected by an
external force acting on a hydraulic actuator. The numerical approach was based on the
law of conservation of mass, Newton’s second law, and the ideal gas law. The numerical
approach was solved using the Euler method and the Runge-Kutta method. The methods
were implemented using Microsoft Excel 2007 edition. A simulation using
FLOWMASTER, a one-dimensional computational fluid dynamics software, was also
created to compare with the numerical approach. All three methods were used to analyze
the response of two separate models: a standalone accumulator with a pressure transient
input and a complete hydraulic system with an impulse force input. The outputs for the
behavior of the accumulator in each of the models were compared for all three methods.
The Euler method and the Runge-Kutta method were easily implemented and
manipulated in a Microsoft Excel 2007 spreadsheet and showed similar outputs for both
models. However, when compared to the FLOWMASTER simulation, the outputs for
both models did not agree with the numerical approach. Although the outputs for the
numerical methods did not match the FLOWMASTER simulation, the output from the
FLOWMASTER simulation were unexpected for the behavior of the hydraulic system
while the output using the numerical approach produced expected results. Further
comparison between the outlined numerical approach and other computational fluid
dynamic software or experimental results need to be accomplished to determine the
accuracy of the outlined numerical approach.
ix
1.
Introduction
Many factors have to be taken into account in the design of a piping system. Depending
on the type of piping system being designed and its application, several normal and
abnormal conditions have to be considered in the design process. One such factor that
needs to be accounted for during abnormal conditions is the occurrence of pressure
transients in the piping system.
Pressure transients in piping systems can occur due to many different abnormal
system conditions. Most common pressure transients studied today occur due to one of
two conditions. Condition one is the stoppage of a moving fluid due to the instantaneous
closure of a valve. Just before valve closure, the pipe is full of fluid moving at a certain
velocity. If the valve is suddenly closed, the instantaneous stoppage of the moving fluid
converts the kinetic energy, i.e. velocity, of the moving fluid to potential energy by
increasing the pressure of the fluid at the point it was stopped. However, the fluid farther
upstream of the valve continues to move. The increase in the pressure of the fluid at the
point of stoppage causes the fluid element directly upstream of it to come to rest and
then begins to increase the pressure of that element of fluid [1]. This causes a pressure
wave to develop. This type of pressure transient is also referred to as a water hammer.
Water hammer is usually caused by quick shutting valves within the piping system or the
stoppage of a power element in the system [2]. Condition two is the changing of an
operating condition of a turbomachine which results in unsteady flow in the attached
piping system. This may be the startup or stoppage of centrifugal pump, or a load
adjustment at a motor on an attached pump [3]. Sudden changes to the operating
conditions of the pressure source (i.e. pump) of a piping system will cause pressure
transients in the attached system.
A third abnormal condition in a piping system that can cause pressure transients
is the action of an external force on an actuator in the system. The external force moves
the actuator, which causes movement of the liquid inside the actuator and the associated
piping system. The acceleration of the liquid within the piping system due to the external
force causes a pressure transient and therefore a pressure increase. Examples where this
type of transient can occur are hydraulically operated mill rolls if a large piece of foreign
matter enters the mill and drives the roll up thereby driving up the actuators [4], rock
1
drills which oscillate and back drive the actuator when operating [5] and mechanical
shocks in hydraulically driven equipments such as suspension systems for fork-lifts,
mobile cranes and dump trucks [6].
All the above mentioned transient conditions create pressure increases in the
associated piping systems which can lead to pipe ruptures and component damage. One
possible solution is to beef up components so they can withstand the pressure increase.
However, this solution can be very expensive depending on the size and complexity of
the system [7]. A better and proven method to suppress pressure transients is to
incorporate an air chamber or accumulator into the system near the component where the
pressure transient can potentially occur.
This project outlines a numerical approach to analyze the behavior of such an
accumulator that can be easily implemented in a spreadsheet or other engineering
calculation software. The most available software for calculations is currently Microsoft
Excel, and therefore Microsoft Excel will be used to model the accumulator. The
determination whether or not the developed approach is easily implemented will be if it
can be easily modeled and manipulated in the spreadsheet. If the approach cannot be
easily implemented and manipulated, then for the purposes of this project it is
impracticable.
2
2.
Methodology
The numerical approach used in this project to analyze the response of an accumulator to
pressure transients in a hydraulic system is developed specifically for the accumulators
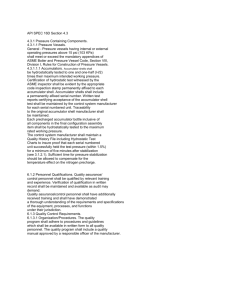
affected by impulse forces acting on hydraulic actuators. An example of a hydraulic
system with accumulators that are used to attenuate this type of impulse force is shown
in Figure 2-1. Figure 2-1 shows a simplified schematic of a hydraulically operated
suspension system for a dump truck. In this system, an impulse force would act on the
actuators thereby driving liquid into the system and increasing the pressure. A set of
equations is obtained to model the behavior of the major components of interest. As seen
in Figure 2-1, the actuators and accumulators are isolated from any other hydraulic
system components, i.e. pump, motor, tank, by the control valve being in the center
blocked position. Therefore, for the purpose of the model only the behavior of one
accumulator and actuator shall be modeled.
Figure 2-1: Hydraulically Driven Suspension System with Accumulators [6]
The set of equations to model the response of the hydraulic system will be based
on the law of conservation of mass, Newton’s second law, and the ideal gas law. The
obtained set of differential equations will be modeled using the Euler method and the
Runge-Kutta method to approximate the behavior of the hydraulic system. The behavior
of the hydraulic system (i.e. pressure, flow rate, piston velocity) using the numerical
3
approach will then be compared to the results of the behavior of the same system as
simulated by FLOWMASTER, a simulation program used to model thermodynamic and
fluid systems [8]. The Euler method, Runge-Kutta method and the FLOWMASTER
simulations were first used to model a standalone accumulator with a transient pressure
input and then a complete hydraulic system with a transient force input.
2.1
Assumptions
In developing the model in this project several whole system and component specific
assumptions were used.
1. The accumulators are piston-type [9]. The accumulators initially contain a given
volume of gas, 𝑉𝑔 , at a given pressure, 𝑃𝑔 .
2. When the system is working normally (i.e. no impulse force), the accumulator is
at its lowest pressure and the accumulator piston is at its lowest point of travel.
3. Pressure drop through piping is negligible. Since the model is based on a dump
truck suspension system, the actuator and accumulator will be in close proximity
to one another and the length of pipe between them shall be minimal.
4. The liquid in the hydraulic system is incompressible. Comparing the
compressibility of the liquid to the compressibility of the gas in the system, it is
reasonable to consider the liquid to be incompressible.
5. There is no leakage in the system. Any external or internal leakage should be
minimal in a hydraulic system.
6. The air in the accumulator is an ideal gas and the change in air states in the
−𝛾
accumulator is an adiabatic process and is governed by 𝑃𝑔 = (𝐶𝑜𝑛𝑠𝑡)𝑉𝑔
[10].
An adiabatic process can be assumed due to the very short duration of the
pressure transient.
2.2
Accumulator Behavior Modeling
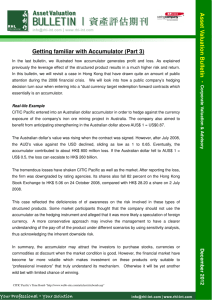
A schematic representation of the effects of a pressure transient in a typical piston-type
accumulator is shown in Figure 2-2. Figure 2-2 shows the movement of the piston in the
accumulator when the pressure of the liquid in the system temporarily exceeds the
pressure of the gas in the accumulator.
4
Figure 2-2: Typical Piston-Type Accumulator [9]
Figure 2-3 shows a simplified schematic representation of the change in the accumulator
when the pressure of the liquid in the system, 𝑃𝑙 , increases above the initial pressure of
the gas in the accumulator, 𝑃𝑔,0 . For now the time dependent input variable into the
system is the pressure of the liquid, 𝑃𝑙 . The flow rate of the liquid, 𝑄𝑎𝑐𝑐 , is related to 𝑃𝑙 .
However, the relationship between 𝑃𝑙 and 𝑄𝑎𝑐𝑐 will be discussed further when
examining the behavior of the hydraulic system as a whole.
Figure 2-3: Piston-Type Accumulator Schematic
2.2.1
Accumulator Initial Conditions
Using the previous assumptions listed in section 2.1, two initial conditions were assumed
for the behavior of the accumulator.
1. The initial position of the accumulator piston,𝑦0 , is zero
2. The initial velocity of the accumulator piston, 𝑦0′ , is zero
2.2.2
Accumulator Behavior Equations
Using Figure 2-3, the equations for the behavior of the accumulator can be obtained with
changing 𝑃𝑙 . The behavior of the accumulator is characterized by the position, 𝑦,
5
velocity, 𝑦 ′ , and acceleration, 𝑦 ′′ , of the accumulator piston. The equations governing
the accumulator behavior are obtained as follows.
Using the initial condition that the initial position of the accumulator piston is
zero and knowing the accumulator length, 𝐿, and accumulator piston area, 𝐴𝑝 , the
volume of gas in the accumulator, 𝑉𝑔 , can be obtained using Equation (1). The volume of
the gas is in liters.
𝑉𝑔 = (1000𝑙/𝑚3 )𝐴𝑝 (𝐿 − 𝑦) = 1000𝐴𝑝 (𝐿 − 𝑦)
(1)
The pressure of the gas in the accumulator can be obtained using assumption six
listed in section 2.1 and is given by Equation (2).
−𝛾
𝑃𝑔 = (𝐶𝑜𝑛𝑠𝑡)𝑉𝑔
(2)
Also, using the initial condition that the velocity of the accumulator piston is
zero, the time rate of change of the accumulator gas volume, 𝑉𝑔′ , can be obtained using
Equation (3).
𝑑𝑦
𝑉𝑔′ = −(1000𝑙/𝑚3 )(𝐴𝑝 )(𝑦 ′ ) = −1000𝐴𝑝 𝑑𝑡
(3)
Since the accumulator piston has a lower position limit, Equation (3) is only valid if the
position of the piston is above zero or the velocity of the piston is positive. Otherwise,
𝑉𝑔′ = 0.
The acceleration of the accumulator piston can be obtained by using Newton’s
second law and balancing the forces acting on the accumulator piston as shown in
Equation (4).
𝑑2 𝑦
𝑚𝑝 𝑑𝑡 2 = 𝑚𝑝 𝑦 ′′ = 𝐴𝑝 (𝑃𝑙 − 𝑃𝑔 ) →
𝑦 ′′ = (𝐴𝑝 ⁄𝑚𝑝 )(𝑃𝑙 − 𝑃𝑔 ) =
(4)
The forces acting on the accumulator piston include the pressure of the gas, 𝑃𝑔 , on the
upper surface of the piston and the pressure of the liquid, 𝑃𝑙 , on the lower surface of the
piston as shown in Figure 2-3. Again, since the accumulator piston has a lower position
limit, Equation (4) is only valid if the position of the piston is above zero or the pressure
of the liquid is greater or equal to the pressure of the gas.
The piston velocity and position is obtained using Equations (5) and (6)
respectively.
6
𝑑𝑦 ′
𝑑𝑡
𝑑𝑦
𝑑𝑡
= 𝑦 ′′
(5)
= 𝑦′
(6)
The volume of the accumulator is obtained using Equation (7).
𝑑𝑉𝑔
𝑑𝑡
= 𝑉𝑔′
(7)
Additionally, the flow rate of liquid into or out of the accumulator, 𝑄𝑎𝑐𝑐 , is equal
to the change in volume of gas in the accumulator and is given by Equation (8).
𝑄𝑎𝑐𝑐 = 𝑉𝑔′ = −(1000𝑙/𝑚3 )(𝐴𝑝 )(𝑦 ′ )
2.3
(8)
Actuator Behavior Modeling
As shown in Figure 2-1, the type of actuator which will be modeled is a single acting
linear hydraulic cylinder. The terms actuator and cylinder will be used interchangeably
for the remainder of this report. The term used will depend on the context of the
statement and the source of the information. Single acting cylinders are operated through
a hydraulic port only at one end of the cylinder. When liquid enters that port, the piston
extends out of the actuator. External forces acting on the piston would return it to its
normal position, and force the liquid out of the actuator port. Figure 2-4 shows a
schematic of a single acting linear hydraulic actuator. The blind side of the actuator
piston is in contact with the liquid. The rod side of the piston is in contact with
atmosphere. Therefore the force acting on the blind side area, 𝐴𝑐𝑦𝑙 , of the piston is the
pressure of the liquid, 𝑃𝑙 . The rod side of the piston, whose area is 𝐴𝑐𝑦𝑙 minus the area of
the rod, 𝐴𝑟𝑜𝑑 , is open to atmospheric pressure, 𝑃𝑎𝑡𝑚 . In addition, an external impulse
force, 𝐹, is assumed to be acting on the piston. The mass of the piston, 𝑚𝑐𝑦𝑙 , will include
the mass of the piston and the mass of the component or devise being moved. This
definition for 𝑚𝑐𝑦𝑙 is used to establish that in hydraulic system the impulse force never
acts directly on the piston but acts on the component being driven. Therefore, the mass
that is accelerated by the impulse force is not just the mass of the piston but also the
mass of the attached component.
7
Figure 2-4: Hydraulic Actuator Schematic
2.3.1
Actuator Initial Conditions
To simplify the model for the behavior of the actuator, several initial conditions for the
actuator were assumed.
1. The initial position of the actuator piston, 𝑥0 , is equal to stroke of the actuator, 𝑠
2. The initial velocity of the actuator piston, 𝑥0′ , is zero
2.3.2
Actuator Behavior Equations
Unlike the behavior of the accumulator, which can be modeled as a standalone
component using the equations in section 2.2.2 and a given changing 𝑃𝑙 value, the
behavior of the actuator cannot be modeled as a standalone component. When
considering the actuator as a standalone component, the number unknown variables is
greater than the number of equations. Therefore the following equations cannot be used
to model the behavior of an actuator alone, but will be used when modeling the behavior
of the entire hydraulic system. Therefore, assuming 𝑃𝑙 is known for the system and using
Figure 2-4, the acceleration of the actuator piston,
𝑑2 𝑥
𝑑𝑡 2
= 𝑥 ′′ , can be obtained for a given
𝐹 from a force balance equation given in Equation (9).
𝐴
𝐴𝑐𝑦𝑙 −𝐴𝑟𝑜𝑑
𝑥 ′′ = (𝑚𝑐𝑦𝑙 ) 𝑃𝑙 − (
𝑐𝑦𝑙
𝑚𝑐𝑦𝑙
1
) 𝑃𝑎𝑡𝑚 − (𝑚 ) 𝐹
𝑐𝑦𝑙
(9)
The actuator piston velocity and position can be obtained from the acceleration and
velocity respectively from Equations (10) and (11).
𝑑𝑥 ′
𝑑𝑡
𝑑𝑥
𝑑𝑡
= 𝑥 ′′
(10)
= 𝑥′
(11)
8
Additionally, the flow rate out of the actuator, 𝑄𝑐𝑦𝑙 , can be obtained using Equation (12).
𝑄𝑐𝑦𝑙 = −(1000𝑙/𝑚3 )(𝐴𝑐𝑦𝑙 )(𝑥 ′ )
2.4
(12)
Complete Hydraulic System Behavior Modeling
For the situation shown in Figure 2-1, the only components whose behavior will be
modeled will be the accumulator and actuator. A simplified schematic of one actuator
and accumulator from Figure 2-1 is shown in Figure 2-5. The components downstream
of the control valve and the control valve itself are not considered in the model because
the control valve is in the shut position and separates these components from any
upstream pressure changes.
Figure 2-5: Hydraulic System Schematic
Based on the schematic shown in Figure 2-5, the movement of the actuator piston due to
the applied impulse force, 𝐹, causes an increase of the fluid pressure, 𝑃𝑙 , in the system
and flow rate out of the actuator, 𝑄𝑐𝑦𝑙 as explained in section 2.3. The fluid flowing out
of the actuator then causes a flow rate into the accumulator, 𝑄𝑎𝑐𝑐 . The pressure of the
liquid, 𝑃𝑙 , is assumed to be the same at every point in the system.
2.4.1
Hydraulic System Initial Conditions
The initial conditions of the system shown in Figure 2-5 were assumed to be the
following.
1. The initial position of the accumulator piston,𝑦0 , is zero
2. The initial velocity of the accumulator piston, 𝑦0′ , is zero
3. The initial position of the actuator piston, 𝑥0 , is equal to stroke of the actuator, 𝑠
4. The initial velocity of the actuator piston, 𝑥0′ , is zero
9
5.
The system is initially at equilibrium. This means that a balance of forces exists
between the impulse force, 𝐹0 , the atmospheric pressure, 𝑃𝑎𝑡𝑚 , the liquid pressure,
𝑃𝑙,0, and the gas pressure, 𝑃𝑔,0 .
6. The acceleration of the accumulator piston, 𝑦0′′ , is zero
7. The acceleration of the actuator piston, 𝑥0′′ , is zero
2.4.2
Hydraulic System Behavior Equations
The equations that model the behavior of the hydraulic system shown in Figure 2-5, are
a combination of the equations that model the behavior of the accumulator and actuator
in section 2.2.2 and section 2.3.2 respectively. There exists more than one approach to
combining the equations of the previous sections to obtain the equations that model the
behavior of the hydraulic system. This section will only describe one possible
combination.
Using Figure 2-5, the equations for the behavior of the system can be obtained
with a given function for 𝐹. The behavior of the accumulator will be characterized by the
position, 𝑦, velocity, 𝑦 ′ , and acceleration, 𝑦 ′′ , of the accumulator piston, and the
behavior of the actuator will be characterized by the position, 𝑥, velocity, 𝑥 ′ , and
acceleration, 𝑥 ′′ , of the actuator piston. The first values obtained are the volume, 𝑉𝑔 , and
pressure,𝑃𝑔 , of the gas in the accumulator, using Equations (1) and (2) respectively.
Using the pressure of the gas in the accumulator, the liquid pressure, 𝑃𝑙 , of the
system can be obtained by rearranging Equation (4) as shown in Equation (13).
𝑃𝑙 = (𝑚𝑝 ⁄𝐴𝑝 )𝑦 ′′ + 𝑃𝑔
(13)
Using 𝑃𝑙 , obtained from Equation (13), the acceleration of the actuator piston,
𝑥 ′′ , can be obtained from Equation (9). The actuator piston velocity and position can
then be obtained using Equations (10) and (11) respectively.
Since the hydraulic system being evaluated is an isolated system, the flow rate
out of the actuator, 𝑄𝑐𝑦𝑙 , is equal in magnitude but opposite in direction to the flow rate
into the accumulator, 𝑄𝑎𝑐𝑐 . Using the relationship between the accumulator piston
velocity and flow rate in Equation (8) and the actuator piston velocity and flow rate in
Equation (12), Equation (14) is used to obtain the accumulator piston velocity.
10
𝐴𝑐𝑦𝑙
𝑦′ = ( 𝐴 ) 𝑥′
(14)
𝑝
Using the velocity of the accumulator piston, the position and acceleration of the
accumulator piston can be obtained using Equations (6) and (5) respectively.
2.5
Euler Method
The Euler method is a first order accurate, single-step numerical procedure useful for
solving initial value problems for ordinary differential equations. Using the initial
conditions given in section 2.2.1 and section 2.4.1 for the accumulator and the complete
hydraulic system respectively, the Euler method was used as one numerical approach to
obtain the behavior of the two models. The equations used with the Euler method to
model the accumulator and the hydraulic system are shown in Appendices C and H
respectively.
2.6
Runge-Kutta Method
The Runge-Kutta method is a fourth order accurate, single-step numerical procedure
useful for solving initial value problems for ordinary differential equations. Similar to
the Euler method, using the initial conditions for the accumulator and the complete
hydraulic system, the fourth order Runge-Kutta method was used as a second numerical
approach to obtain the behavior of the two models. The equations used with the RungeKutta method to model the accumulator and the hydraulic system are shown in
Appendices D and I respectively.
2.7
FLOWMASTER Method
FLOWMASTER is a one-dimensional computational fluid dynamics software that
allows the modeling and analysis of complex piping systems. The software can calculate
pressure transients and flow rates in piping networks. It can also be used to conduct
pressure drop calculations, heat transfer analysis and analyze system operations such as
load inputs and pump curves. The piping networks are drawn onscreen using a list of
piping components, such as pipes, actuators, pumps, orifices and pipe fittings, and
boundary devices, such as pumps, tanks or pressure/ flow inputs. More information on
this software can be found in Reference [11].
11
FLOWMASTER is capable of modeling compressible and incompressible piping
systems. To model the accumulator in Figure 2-3 and the hydraulic system in Figure 2-5,
the incompressible license of the software was used. This was done for two reasons. The
first reason is that according to assumption four in section 2.1, the behavior of the liquid
in the hydraulic system being modeled is considered incompressible. Having the
FLOWMASTER simulation and the numerical models use the same assumption will
allows for better comparison between results. The second reason is that although the
accumulator in the hydraulic system being modeled contains a compressible gas, in
FLOWMASTER, the behavior of the gas in the accumulator is built into the components
and not dependent on the simulation license being used. Additionally, several of the
accumulators simulated in FLOWMASTER are required to be used with an
incompressible license.
To simulate the accumulator system shown in Figure 2-3, three components were
used. The accumulator itself was simulated using a FLOWMASTER component called
an air vessel. Several different components are available in the FLOWMASTER
components menu under the ‘accumulator’ category. However, none of the components
exactly matched the features of a piston-type accumulator. The air vessel components
comes the closest to matching the properties and behavior of a piston-type accumulator.
However, the air vessel component lacks a piston. The air vessel component does not
model weight and friction due to piston inside an accumulator. Due to the large pressures
which will be simulated, it is expected that the accumulator piston weight or friction in
the model would have a negligible effect on the results.
To simulate the pressure input into the system, a component called a pressure
source was used. This component allows a user to set the pressure input into the system
and changes the flow rate into the system to match the required pressure input.
Additionally, it is necessary to simulate a hydraulic pipe between the pressure source
and the air vessel. Pressure nodes, which connect components in FLOWMASTER, store
and transfer pressure data between components during a simulation. These nodes do not
transfer flow rates. Therefore it is necessary to simulate a pipe between any two
components in piping network in order for the simulation to work properly. The
12
FLOWMASTER model for the simulation of an accumulator is shown in Figure 2-6.
The properties for each component in Figure 2-6 are listed in Appendix E.
Figure 2-6: FLOWMASTER Accumulator Simulation Graphic
To simulate the hydraulic system shown in Figure 2-5, the accumulator was
simulated using an air vessel component as explained above. The single acting linear
hydraulic actuator was simulated using a single-rod double-acting cylinder component.
A pressure-source component was attached to the rod side of the cylinder and was set to
provide a constant pressure equal to atmospheric pressure. This combination of
components was used to ensure that the rod side of the actuator was properly simulated.
The blind side of the cylinder component and the air vessel component were connected
by a pipe due to the built in functionality of FLOWMASTER as explained above. To
simulate the impulse force acting on the actuator a cylinder load curve controller
component was used. This component connects to the cylinder component and can be
used to exert an external force on the cylinder. The FLOWMASTER model for the
simulation of the hydraulic system is shown in Figure 2-7. The properties for each
component in Figure 2-7 are listed in Appendix J.
Figure 2-7: FLOWMASTER Hydraulic System Simulation Graphic
13
3.
Results and Discussion
The following is the comparison of the modeled behavior of the accumulator and the
complete hydraulic system using the three methods discussed in section 2. The modeling
equations for the Euler and Runge-Kutta numerical methods were programmed into
Microsoft Excel spreadsheets.
For modeling the behavior of an accumulator, the pressure transient of the liquid
was characterized by Equation (15).
850,000𝑃𝑎−350,000𝑃𝑎
𝑃𝑙 = (
0.5𝑠𝑒𝑐
) 𝑡 + 350,000𝑃𝑎
(15)
This pressure transient was obtained from an example evaluation in Reference [12]. The
duration of the pressure transient was chosen such that an adiabatic condition can be
assumed .Other properties used to model the system are in outlined Appendix A.
For modeling the behavior of a potential hydraulic system used in a dump truck
suspension system, the impulse force acting on the actuator was characterized by
Equation (16).
200,000𝑁−62,588𝑁
(
) 𝑡 + 62,588𝑁
𝐹 = −(
(0.5𝑠𝑒𝑐/2)
200,000𝑁−62,588𝑁
(0.5𝑠𝑒𝑐/2)
) 𝑡 + 462,588𝑁
{62,588𝑁
0 < 𝑡 ≤ 0.25
0.25 < 𝑡 ≤ 0.5
(16)
𝑡 > 0.5
The minimum and maximum values of the of the impulse force were assumed to be the
empty and loaded conditions for the rear axle of a Caterpillar 740 articulated dump truck
[13]. The force was assumed to cycle to create a situation where the accumulator
behavior can be modeled. The duration of the impulse force was chosen to be equal to
the duration used for accumulator behavior modeling for consistency and so that an
adiabatic condition can be assumed.
3.1
Comparison of Accumulator Behavior
Each of the three methods used to model the accumulator behavior were attempted using
four time steps, ℎ= 0.05, 0.005, 0.0005 and 0.00005. The largest time step, ℎ= 0.05, was
chosen based on Reference [3] which states that the “most reliable simulations require at
least eight distance intervals per wavelength or eight time intervals per period”
(Reference [3], page 262). Since the period, or total time, of the pressure increase was
14
0.5 seconds, the largest time step chosen was ℎ = 𝑝𝑒𝑟𝑖𝑜𝑑/10. Smaller time steps were
then chosen to see if the output of each consecutive model changed. Each consecutive
time step used is an order of magnitude smaller than the previous one. A time step
smaller than ℎ= 0.00005 was not used because it would require more than 32,000 data
points which is the maximum number of data points which can be graphed in Microsoft
Excel 2007 edition. If the numerical method cannot be easily modeled and manipulated
in this software, then for the purposes of this project it is impracticable. The accumulator
behavior was modeled using the following attributes: accumulator piston position,
accumulator piston velocity, and gas pressure.
3.1.1
Model Comparisons for 𝒉= 0.05
The Euler method, using the ℎ= 0.05 time step, became unstable and began to output
invalid numerical values at 𝑡 = 0.2 𝑠𝑒𝑐 of the model. The Runge-Kutta method also
became unstable and began to output invalid numerical values at 𝑡 = 0.2 𝑠𝑒𝑐 of the
model. The FLOWMASTER simulation showed no change in the piston position over
the entire simulation and was also considered invalid.
3.1.2
Model Comparisons for 𝒉= 0.005
The Euler Method, using the ℎ= 0.005 time step, became unstable and began to output
invalid numerical values at 𝑡 = 0.475 𝑠𝑒𝑐 of the model. The Runge-Kutta method and
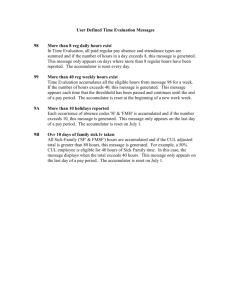
the FLOWMASTER simulation outputted stable results using this time step.
Figure 3-1 shows the accumulator piston position and velocity for the RungeKutta method and the FLOWMASTER simulation.
Figure 3-2 shows the pressure of the gas in the accumulator during the pressure
transient for the Runge-Kutta method and the FLOWMASTER simulation.
15
Figure 3-1: Accumulator Piston Behavior Comparison – h=0.005
Figure 3-2: Accumulator Gas Pressure Comparison – h=0.005
16
3.1.3
Model Comparisons for 𝒉= 0.0005
Using the ℎ= 0.0005 time step, all three modeling methods outputted stable results.
Figure 3-3 shows the accumulator piston position and velocity for the each of the three
methods. Figure 3-4 shows the pressure of the gas in the accumulator during the pressure
transient for the each of the three methods.
Figure 3-3: Accumulator Piston Behavior Comparison – h=0.0005
17
Figure 3-4: Accumulator Gas Pressure Comparison – h=0.0005
3.1.4
Model Comparisons for 𝒉= 0.00005
Using the ℎ= 0.00005 time step, all three modeling methods outputted stable results.
Figure 3-5 shows the accumulator piston position and velocity for the each of the three
methods. Figure 3-6 shows the pressure of the gas in the accumulator during the pressure
transient for the each of the three methods.
18
Figure 3-5: Accumulator Piston Behavior Comparison – h=0.00005
Figure 3-6: Accumulator Gas Pressure Comparison – h=0.00005
19
3.1.5
Discussion of Accumulator Behavior Results
To compare the three separate methods to each other and to compare each method to
itself at each of the time steps, the accumulator piston position was first used. The
accumulator velocity and the gas pressure were then used to confirm the comparison.
Comparing the accumulator piston position results in Figure 3-1, Figure 3-3 and
Figure 3-5, several observations can be made. The first observation is that the RungeKutta method output similar piston position graphs for each of the three time steps. The
second observation is that the piston position at each time step does not match for the
Euler method. However, it can be observed, from Figure 3-3 and Figure 3-5, that the
Euler method results overlap the Runge-Kutta method results as the time step was
reduced.
For the FLOWMASTER simulation, the accumulator piston position results
shown for each of the three time steps do not overlap well. The average values of the
piston positions and the overall vector of the graphs overlap, however the actual do not
overlap. As the time step decreases, the accumulator piston position graphs diverge from
one another. It is also observed that the overall vectors of the accumulator piston
position results for the two numerical methods match the FLOWMASTER simulation.
However, the results for the Euler method and the Runge-Kutta method do not overlap
the FLOWMASTER simulation results.
The observations outlined above are the same for the accumulator piston
position, accumulator piston velocity and the gas pressure.
3.2
Comparison of Complete Hydraulic System Behavior
The hydraulic system described in section 2.4 was modeled using the Euler method, the
Runge-Kutta method, and a FLOWMASTER simulation. Four time steps were used for
each of the methods. The time step used were, ℎ= 0.05, 0.005, 0.0005 and 0.00005. The
reasoning behind the use of these time steps to model the complete hydraulic system is
identical to the reasoning described for the accumulator behavior in section 3.1. The
hydraulic system behavior was modeled using the following attributes: accumulator
piston position, accumulator piston velocity, and gas pressure. Other behaviors, such as
20
the actuator piston position and velocity were analyzed and will be discussed; however
those attributes were not graphed.
3.2.1
Model Comparisons for 𝒉= 0.05
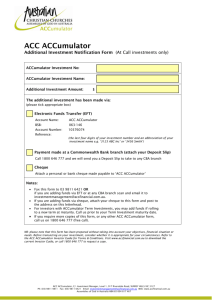
Using the ℎ= 0.05 time step, all three modeling methods outputted stable results. Figure
3-7 shows the accumulator piston position and velocity for the each of the three
methods. Figure 3-8 shows the pressure of the gas in the accumulator during the impulse
force for the each of the three methods. Figure 3-8 also shows the liquid pressure in the
hydraulic system assuming the liquid is incompressible and an accumulator is not
installed. This information was included in the graph to show the benefit of including an
accumulator in the system only.
Figure 3-7: Hydraulic System: Accumulator Piston Comparison – h=0.05
21
Figure 3-8: Hydraulic System: Gas Pressure Comparison – h=0.05
3.2.2
Model Comparisons for 𝒉= 0.005
Using the ℎ= 0.005 time step, all three modeling methods outputted stable results. Figure
3-9 shows the accumulator piston position and velocity for the each of the three
methods. Figure 3-10 shows the pressure of the gas in the accumulator during the
impulse force for the each of the three methods. Figure 3-10 also shows the liquid
pressure in the hydraulic system assuming the liquid is incompressible and an
accumulator is not installed.
22
Figure 3-9: Hydraulic System: Accumulator Piston Comparison – h=0.005
Figure 3-10: Hydraulic System: Gas Pressure Comparison – h=0.005
23
3.2.3
Model Comparisons for 𝒉= 0.0005
Using the ℎ= 0.0005 time step, all three modeling methods outputted stable results.
Figure 3-11 shows the accumulator piston position and velocity for the each of the three
methods. Figure 3-12 shows the pressure of the gas in the accumulator during the
impulse force for the each of the three methods. Figure 3-12 also shows the liquid
pressure in the hydraulic system assuming the liquid is incompressible and an
accumulator is not installed.
Figure 3-11: Hydraulic System: Accumulator Piston Comparison – h=0.0005
24
Figure 3-12: Hydraulic System: Gas Pressure Comparison – h=0.0005
3.2.4
Model Comparisons for 𝒉= 0.00005
Using the ℎ= 0.00005 time step, all three modeling methods outputted stable results.
Figure 3-13 shows the accumulator piston position and velocity for the each of the three
methods. Figure 3-14 shows the pressure of the gas in the accumulator during the
impulse force for the each of the three methods. Figure 3-14 also shows the liquid
pressure in the hydraulic system assuming the liquid is incompressible and an
accumulator is not installed.
25
Figure 3-13: Hydraulic System: Accumulator Piston Comparison – h=0.00005
Figure 3-14: Hydraulic System: Gas Pressure Comparison – h=0.00005
26
3.2.5
Discussion of Hydraulic System Behavior Results
To compare the three separate methods to each other and to compare each method to
itself at each time step, the accumulator piston position was first used. The accumulator
velocity and the gas pressure were then used to confirm the comparison. Additionally,
the pressure of the gas in the accumulator and the pressure of the liquid in the system
were within less than 0.3% of each other in value in all simulations.
Comparing the accumulator piston position results in Figure 3-7, Figure 3-9,
Figure 3-11, and Figure 3-13, several observations can be made. The first observation is
that both the Euler method and the Runge-Kutta method output similar piston position
results for at each of the four time steps. For time steps ℎ= 0.05 and 0.005, the results of
the numerical methods do not overlap and both results change with decreasing time step.
For the following two time steps used, the numerical method results overlap at each time
step and the results at each of the time steps overlap each other.
For the FLOWMASTER simulation, the change in the accumulator piston
position decreases with each decrease in time step. When the FLOWMASTER
simulation is run at smaller time steps than the ones discussed, the accumulator piston is
observed to be stationary. The FLOWMASTER results closely match the numerical
methods results for ℎ= 0.005, but diverge as the time step is reduced.
The observations outlined above are the same for the accumulator piston
position, accumulator piston velocity and the gas pressure.
27
4.
Conclusion
Based on the results and discussion in section 3, the numerical approach outlined in this
project can potentially be used to model the behavior of an accumulator in a hydraulic
system. When comparing the outputs of the three different methods for the model of a
standalone accumulator several observations were made. The outputs of the Euler
method and the Runge-Kutta method were nearly identical when the smaller time steps
were used. The outputs of the numerical methods did not match the outputs of the
FLOWMASTER simulation. However, the trends of the outputs were similar and
showed a general similar position for the accumulator piston. When comparing the
outputs of the three different methods for the model of the complete hydraulic system,
the outputs using the Euler method and the Runge-Kutta method were again nearly
identical for all the time steps. The outputs of the numerical methods also match the
outputs of the FLOWMASTER simulations for larger time steps. However, as the time
step size was reduced, the FLOWMASTER simulation began to produce outputs that
showed that the hydraulic system had no response to the impulse force. This type of
output from the FLOWMASTER simulation is unexpected for the behavior of the
hydraulic system.
The numerical approach was solved using the Euler method and the Runge-Kutta
method and was implemented using Microsoft Excel 2007 edition. Microsoft Excel is
currently the most common spreadsheet software in use. The outputs for both models
using the Euler method and the Runge-Kutta method converged to a single result without
the need to use excessively small time steps. The worksheets in Microsoft Excel 2007
edition are limited to about 1,000,000 rows. Microsoft Excel 2007 is also limited to the
ability to graph about 32,000 sets of data points. Due to the ability to use relatively large
time steps, the number of data points used to analyze both models did not exceed
Microsoft Excel’s capabilities. Therefore, the use of the Euler numerical method and the
Runge-Kutta numerical method met the requirements of being easy to implement and
manipulate.
The numerical approach outlined in this project is easy to implement and
manipulate, and provides expected results for the behavior of an accumulator. Since the
output of the numerical approach outlined in this project does not match the output of the
28
FLOWMASTER simulation, it is inconclusive whether the numerical approach is
accurate. However, the numerical approach does produce an expected output for the
behavior of the hydraulic system, while the FLOWMASTER simulation produces an
output which shows no effect from the impulse force as the time step size is reduced.
Therefore, it would be premature to argue that the numerical method outlined in this
project does not produce an accurate output for the behavior of an accumulator.
4.1
Suggestions for Further Research
Due to the disagreement between the outlined numerical method and the
FLOWMASTER simulation results, further research needs to be conducted to determine
the whether the numerical approach or the FLOWMASTER simulation is inaccurate.
Further research can be conducted in determining the accuracy of the numerical
approach by either comparing the results to the results of different computational fluid
dynamic software, or comparing it to experimentally obtained values.
Currently little information exists on the subject of simulating the behavior of
accumulators for any application. If subsequent computational fluid dynamic software
confirms the accuracy of the outlined numerical approach, then suggested further
research would include determining how much of an effect the assumption used in
section 2.1 have on the results. The research can concentrate on how the output would be
affected if the liquid in the hydraulic system was considered compressible, the air in the
accumulator was treated as a real gas, or the compression of the gas was not considered
an adiabatic process.
29
5.
[1]
References
Massey BS. Mechanics of Fluids 6th edition. Padstow, Cornwall: T.J. Press Ltd;
1989. 599 p.
[2]
Merritt HE. Hydraulic Control Systems. New York; John Wiley and Sons, Inc.;
1967. 358 p.
[3]
Wylie EB and Streeter VL. Fluid Transients in Systems. Upper Saddle River, NJ:
Prentice Hall; 1993. 463 p.
[4]
Accumulator Circuits. Hydraulics and Pneumatics. 2012. Available from
http://hydraulicspneumatics.com/200/techzone/accumulators/article/false/6468/te
chzone-accumulators. Accessed 2012 February 15.
[5]
Ijas, M. Damping of Low Frequency Pressure Oscillation. Tampere University of
Technology. 2007.
[6]
Weemac
Brochure.
WEEMAC
Oy.
2011.
Available
from
http://www.weemac.fi/media/weemacbroschure9_11.pdf. Accessed 2012 April 7.
[7]
Zahid Z. Using Accumulators to Smooth Hydraulic Transients. Machine Design.
1977; 16:75-77.
[8]
Ghidaoui MS, Zhao M, McInnis DA and Axworthy DH. A Review of Water
Hammer Theory and Practice. Applied Mechanics Reviews. 2005; 58:49-76.
[9]
Accumulators – Part 1, Accumulators can increase efficiency, provide smoother,
more reliable operation, and store emergency power in case of electrical failure.
Hydraulics
and
Pneumatics.
2012.
Available
from
http://hydraulicspneumatics.com/200/TechZone/Accumulators/Article/False/644
6/TechZone-Accumulators. Accessed 2012 February 15.
[10]
Fox RW, McDonald AT, and Pritchard PJ. Introduction to Fluid Mechanics 6th
edition. New Jersey; John Wiley and Sons, Inc.; 2004. 787 p.
[11]
Welcome to FLOWMASTER. FLOWMASTER Group. Available from
http://www.flowmaster.com/index.html. Accessed 2012 March 25.
[12]
Accumulators: Application and Selection. EPE Process Filters and Accumulators
PVT
LTD.
2012.
Available
from
http://www.accumulatorsandfilters.com/accumulators/Appln.pdf. Accessed 2012,
April 7.
30
[13]
RitchieSpecs: Caterpillar 740 Articulated Dump Truck. RichieSpecs Equipment
Specifications
Richie
Bros.
Auctioneers.
2012.
Available
from
http://www.ritchiespecs.com/specification?type=&category=Articulated+Dump+
Truck&make=Caterpillar&model=740&modelid=91910. Accessed 2012 April 7.
[14]
Piston Type Accumulators: Type-AP. EPE Process Filters and Accumulators
PVT
LTD.
2012.
Available
from
http://www.accumulatorsandfilters.com/accumulators/Piston.pdf. Accessed 2012
March 10.
[15]
Hydraulic Cylinders: WW: Specification. WEEMAC Oy. 2011.Available from
http://www.weemac.fi/pages/products/hydraulic-cylinders/ww/specification.php.
Accessed 2012, March 25.
31
Appendices
A.
Input Variables for Accumulator Simulation
The following table lists the input variables needed to use the numerical method to
model the behavior of an accumulator and the values used.
Table A-1: Input Variables for the Accumulator Simulation
Variable
𝐴𝑝
𝐶𝑜𝑛𝑠𝑡
ℎ
Value
0.0123 m2
8,791,602.5 Pa*liter1.4
0.05 s
0.005 s
0.0005 s
0.00005 s
𝐿
0.815m
𝑚𝑝
6.4 kg
𝑉𝑔
10 liters
𝛾
1.4
Source
Based Accumulator bore size 125 mm, Model
AP-10 [14]
𝛾
𝐶𝑜𝑛𝑠𝑡 = 𝑃𝑔 𝑉𝑔 , where 𝑃𝑔 = 350,000 𝑃𝑎
Several time steps were chosen to see the effect of
time step size to modeled behavior. See section
3.1 for discussion.
𝑚3
𝐿 = (𝑉𝑔 /1000 𝑙𝑖𝑡𝑒𝑟)⁄𝐴𝑝
Based on Accumulator bore size 125 mm Model
AP-10, aluminum density of 2810 kg/m3 and
Figure A-1 dimension [14]
Based Accumulator bore size 125 mm, Model
AP-10 [14]
Ratio of Specific Heat for Air
The following is supporting information for Table A-1. In Figure A-1, the dimensions
labeled ‘A’ and ‘B’ are based on Reference [14]. The remaining dimensions are based on
scaled estimates.
32
Figure A-1: Bore Size 125 mm, Model AP-10 Dimension [14]
B.
Differential Equations for Accumulator Behavior
The following three equations make up the differential equations which govern the
behavior of the system. Equation (17) is the combination of Equations (2), (4), and (5).
Equation (18) is a combination of Equations (3) and (7).
𝑑𝑦 ′
𝑑𝑡
𝑑𝑉𝑔
𝑑𝑡
𝑑𝑦
𝑑𝑡
−𝛾
= (𝐴𝑝 ⁄𝑚𝑝 )(𝑃𝑙 − (𝐶𝑜𝑛𝑠𝑡)𝑉𝑔 )
(17)
= −(1000𝑙/𝑚3 )(𝐴𝑝 )(𝑦 ′ )
(18)
= 𝑦′
(6)
These equations will obtain the volume of the gas in the accumulator and the
accumulator piston position and velocity. Any other variables, such 𝑃𝑔 , can be solved for
by converting from another variable.
33
C.
Accumulator Behavior Simulation using Euler Method
The following are initial conditions which were assumed for simulating the accumulator
behavior.
𝑦0 = 0 𝑚
𝑦0′ = 0 𝑚/𝑠
𝑉𝑔,0 = 10 𝑙𝑖𝑡𝑒𝑟𝑠
Using the above initial conditions and the input variables in Appendix A, the following
equations were solved for 𝑘 = 1 𝑡𝑜 𝑁 in the order listed below.
−𝛾
1. 𝑃𝑔,𝑘−1 = (𝐶𝑜𝑛𝑠𝑡)𝑉𝑔,𝑘−1
(2)
′
′
)
2. 𝑉𝑔,𝑘−1
= −(1000𝑙/𝑚3 )(𝐴𝑝 )(𝑦𝑘−1
(3)
′′
3. 𝑦𝑘−1
= (𝐴𝑝 ⁄𝑚𝑝 )(𝑃𝑙,𝑘−1 − 𝑃𝑔,𝑘−1 )
(4)
′
′′ (ℎ)
4. 𝑦𝑘′ = 𝑦𝑘−1
+ 𝑦𝑘−1
(5)
′
5. 𝑦𝑘 = 𝑦𝑘−1 + 𝑦𝑘−1
(ℎ)
(6)
′
6. 𝑉𝑔,𝑘 = 𝑉𝑔,𝑘−1 + 𝑉𝑔,𝑘−1
(ℎ)
(7)
7. 𝑡𝑘 = 𝑡𝑘−1 + ℎ
Figure C-1: Print Screen of Spread Sheet using Euler Method with h=0.005
D.
Accumulator Behavior Simulation using Runge-Kutta Method
The following are initial conditions which were assumed for simulating the accumulator
behavior.
𝑦0 = 0 𝑚
34
𝑦0′ = 0 𝑚/𝑠
−𝛾
𝑦0′′ = (𝐴𝑝 ⁄𝑚𝑝 ) (𝑃𝑙,𝑘−1 − (𝐶𝑜𝑛𝑠𝑡) (1000𝐴𝑝 (𝐿 − 𝑦𝑘−1 ))
) = 0 𝑚/𝑠 2
𝑉𝑔,0 = 10 𝑙𝑖𝑡𝑒𝑟𝑠
The system of equations which were solved using the Runge-Kutta method was made up
of the following two equations. The Equation (19) was obtained by combining Equations
(1), (2), and (4).
−𝛾
𝑠 = 𝑦𝑘′′ = (𝐴𝑝 ⁄𝑚𝑝 ) (𝑃𝑙,𝑘−1 − (𝐶𝑜𝑛𝑠𝑡) (1000𝐴𝑝 (𝐿 − 𝑦𝑘 )) )
′
′′ (𝑡
𝑛 = 𝑦𝑘′ = 𝑦𝑘−1
+ 𝑦𝑘−1
𝑘 − 𝑡𝑘−1 )
(19)
(5)
Using the above initial conditions and the input variables in Appendix A, the following
equations were solved at for 𝑘 = 1 𝑡𝑜 𝑁 in the order listed below.
−𝛾
1. 𝑠1 = (𝐴𝑝 ⁄𝑚𝑝 ) (𝑃𝑙,𝑘−1 − (𝐶𝑜𝑛𝑠𝑡) (1000𝐴𝑝 (𝐿 − 𝑦𝑘−1 ))
)
′
′′ (𝑡
2. 𝑛1 = 𝑦𝑘−1
+ 𝑦𝑘−1
𝑘 − 𝑡𝑘−1 )
ℎ
−𝛾
3. 𝑠2 = (𝐴𝑝 ⁄𝑚𝑝 ) (𝑃𝑙,𝑘−1 − (𝐶𝑜𝑛𝑠𝑡) (1000𝐴𝑝 (𝐿 − 𝑦𝑘−1 + 2 𝑛1 ))
)
ℎ
′
4. 𝑛2 = 𝑦𝑘−1
+ 𝑠1 (𝑡𝑘 − 𝑡𝑘−1 + 2)
ℎ
−𝛾
5. 𝑠3 = (𝐴𝑝 ⁄𝑚𝑝 ) (𝑃𝑙,𝑘−1 − (𝐶𝑜𝑛𝑠𝑡) (1000𝐴𝑝 (𝐿 − 𝑦𝑘−1 + 2 𝑛2 ))
)
ℎ
′
6. 𝑛3 = 𝑦𝑘−1
+ 𝑠2 (𝑡𝑘 − 𝑡𝑘−1 + 2)
7. 𝑠4 = (𝐴𝑝 ⁄𝑚𝑝 ) (𝑃𝑙,𝑘−1 − (𝐶𝑜𝑛𝑠𝑡) (1000𝐴𝑝 (𝐿 − 𝑦𝑘−1 + ℎ𝑛3 ))
′
8. 𝑛4 = 𝑦𝑘−1
+ 𝑠3 (𝑡𝑘 − 𝑡𝑘−1 + ℎ)
ℎ
′
9. 𝑦𝑘′ = 𝑦𝑘−1
+ 6 (𝑠1 + 2𝑠2 + 2𝑠3 + 𝑠4 )
ℎ
10. 𝑦𝑘 = 𝑦𝑘−1 + 6 (𝑛1 + 2𝑛2 + 2𝑛3 + 𝑛4 )
11. 𝑦𝑘′′ = 𝑠4
′
12. 𝑉𝑔,𝑘
= −(1000𝑙/𝑚3 )(𝐴𝑝 )(𝑦𝑘′ )
(3)
−𝛾
13. 𝑃𝑔,𝑘 = (𝐶𝑜𝑛𝑠𝑡)𝑉𝑔,𝑘
(2)
35
−𝛾
)
Figure D-1: Print Screen of Spread Sheet using Runge-Kutta Method with h=0.005
E.
Accumulator Behavior Simulation using FLOWMASTER
Figure 2-6 shows the FLOWMASTER model that was created to simulate the
accumulator. The model was made using three components and two nodes. Component
one is an air vessel, which was used to simulate the accumulator. The properties of the
air vessel are listed in Table E-1. Component two is a rigid pipe whose properties are
listed in Table E-2. Component three is a pressure source with a pressure versus time
output equal to the Equation (15). The reason for choosing these components to simulate
the accumulator is explained in section 2.7.
Table E-1: FLOWMASTER Accumulator Simulation Component 1: Air Vessel
Feature
Value
Remark
Gas Pressure
350,000 Pa
Precharge pressure
Liquid Level
0m
Initial condition for simulation
Accumulator
0.815 m
Equal to 𝐿 - value in Table A-1
Height
Diameter of Inlet
0.1 m
Chosen to minimize friction and pressure drop
Base Level above
0m
Chosen to eliminate/ eliminate gravitational effects
Reference
Outflow Loss
0
Chosen to eliminate friction and pressure drop
Inflow Loss
0
Chosen to eliminate friction and pressure drop
Liquid Type
Water
1.4
Polytropic Index
Equal to 𝛾 - value in Table A-1
Horizontal crossEqual to 𝐴𝑝 - value in Table A-1
0.0123 m2
sectional area
Table E-2: FLOWMASTER Accumulator Simulation Component 2: Rigid Pipe
Feature
Absolute
Roughness
Value
1E-12 mm
Remark
Chosen to eliminate friction and pressure drop
36
Friction Factor
Diameter
Length
F.
0.02
1m
1m
Chosen to eliminate friction and pressure drop
Chosen to eliminate friction and pressure drop
Input Variables for Hydraulic System Simulation
The following table lists the input variables needed to use the numerical method to
model the behavior of an accumulator and the values used.
Table F-1: Input Variables for the Hydraulic System Simulation
Variable
𝐴𝑐𝑦𝑙
0.0165 m2
𝐴𝑝
0.0491 m2
𝐴𝑟𝑜𝑑
0.0038 m2
ℎ
𝐶𝑜𝑛𝑠𝑡
0.05 s
0.005 s
0.0005 s
0.00005 s
2,440,509,370 Pa*liter1.4
𝐿
2.037 m
𝑚𝑐𝑦𝑙
6380 kg
𝑚𝑝
57.9 kg
𝑃𝑎𝑡𝑚
G.
Value
101,353 Pa
𝑠
3m
𝑉𝑔
100 liters
𝛾
1.4
Source
Based Cylinder Dimensions 125/70, Model WW
[15]
Based Accumulator bore size 250 mm, Model
AP-100 [14]
Based Cylinder Dimensions 125/70, Model WW
[15]
Several time steps were chosen to see the effect of
time step size to modeled behavior. See section
3.1 for discussion.
𝛾
𝐶𝑜𝑛𝑠𝑡 = 𝑃𝑔 𝑉𝑔 , where 𝑃𝑔 = 3,867,947 𝑃𝑎
𝑚3
𝐿 = (𝑉𝑔 /1000 𝑙𝑖𝑡𝑒𝑟)⁄𝐴𝑝
Mass acting on the center axle of a Caterpillar 740
Articulated Dump Truck [13]
Based on Accumulator bore size 250mm Model
AP-100, aluminum density of 2810 kg/m3 and
Figure A-1 scaled dimension [14]
Standard Atmospheric Pressure
Stroke chosen for the actuator to make sure the
actuator piston does not reach the end of the
actuator during the impulse force.
Based Accumulator bore size 250 mm, Model
AP-100 [14]
Ratio of Specific Heat for Air
Differential Equations for Hydraulic System Behavior
The following five equations make up the differential equations which govern the
behavior of the hydraulic system. Equation (20) is the combination of Equations (2), (9),
(10) and (13).
37
𝑑𝑥 ′
𝐴𝑐𝑦𝑙
= (𝑚 ) ((𝑚𝑝 ⁄𝐴𝑝 )𝑦 ′′ + (𝐶𝑜𝑛𝑠𝑡) (1000𝐴𝑝 (𝐿 − 𝑦)) –𝛾 ) –
𝑑𝑡
𝑐𝑦𝑙
𝐴𝑐𝑦𝑙 −𝐴𝑟𝑜𝑑
(
𝑑𝑦 ′
𝑑𝑡
𝑑𝑦
𝑑𝑡
𝑚𝑐𝑦𝑙
1
) 𝑃𝑎𝑡𝑚 − (𝑚 ) 𝐹
(20)
𝑐𝑦𝑙
= 𝑦 ′′
(5)
= 𝑦′
(6)
𝐴
𝑦 ′ = − ( 𝐴𝑐𝑦𝑙 ) 𝑥 ′
(14)
𝑝
𝑑𝑥
𝑑𝑡
= 𝑥′
(11)
These equations will obtain the position and velocity of the actuator piston and the
position, velocity, and acceleration of the accumulator piston. Any other variables, such
𝑃𝑔 , 𝑉𝑔 , or flow rate, can be solved for by converting from another variable.
H.
Hydraulic System Behavior Simulation using Euler Method
The following are initial conditions which were assumed for simulating the behavior of
the hydraulic system.
𝑥0 = 3 𝑚
𝑥0′ = 0 𝑚/𝑠
𝑦0 = 0 𝑚
𝑦0′ = 0 𝑚/𝑠
𝑦0′′ = 0 𝑚/𝑠
Using the above initial conditions and the input variables in Appendix F, the following
equations were solved for 𝑘 = 1 𝑡𝑜 𝑁 in the order listed below.
1. 𝑉𝑔,𝑘−1 = 1000𝐴𝑝 (𝐿 − 𝑦𝑘−1 )
(1)
−𝛾
2. 𝑃𝑔,𝑘−1 = (𝐶𝑜𝑛𝑠𝑡)𝑉𝑔,𝑘−1
(2)
′′
3. 𝑃𝑙,𝑘−1 = (𝑚𝑝 ⁄𝐴𝑝 )𝑦𝑘−1
+ 𝑃𝑔,𝑘−1
(13)
𝐴
′′
4. 𝑥𝑘−1
= (𝑚𝑐𝑦𝑙 ) 𝑃𝑙,𝑘−1 − (
𝑐𝑦𝑙
𝐴𝑐𝑦𝑙 −𝐴𝑟𝑜𝑑
𝑚𝑐𝑦𝑙
1
) 𝑃𝑎𝑡𝑚 − (𝑚 ) 𝐹𝑘−1
𝑐𝑦𝑙
𝐴
′
′
5. 𝑦𝑘−1
= − ( 𝐴𝑐𝑦𝑙) 𝑥𝑘−1
(14)
𝑝
6. 𝑦𝑘′′ =
′
𝑦𝑘′ −𝑦𝑘−1
(5)
ℎ
38
(9)
′
7. 𝑦𝑘 = 𝑦𝑘−1 + 𝑦𝑘−1
(ℎ)
(6)
′
′′ (ℎ)
8. 𝑥𝑘′ = 𝑥𝑘−1
+ 𝑥𝑘−1
(10)
′
9. 𝑥𝑘 = 𝑥𝑘−1 + 𝑥𝑘−1
(ℎ)
(11)
Additionally, for comparison purposes the pressure of the liquid was calculated
assuming no accumulator in the system. In this case, the pressure of the liquid would be
equal to the sum of the force as shown in Equation (21).
𝐴𝑐𝑦𝑙 −𝐴𝑟𝑜𝑑
10. 𝑃𝑙,𝑘−1 = (
𝐴𝑐𝑦𝑙
1
) 𝑃𝑎𝑡𝑚 + (𝐴 ) 𝐹𝑘−1
𝑐𝑦𝑙
(21)
Figure H-1: Print Screen of Spread Sheet using Euler Method with h=0.005
I.
Hydraulic System Behavior Simulation using Runge-Kutta Method
The following are the initial conditions for the Runge-Kutta method were assumed for
simulating the behavior of the hydraulic system.
𝑥0 = 3 𝑚
𝑥0′ = 0 𝑚/𝑠
𝐴
𝑥0′′ = (𝑚𝑐𝑦𝑙 ) ((𝑚𝑝 ⁄𝐴𝑝 )𝑦0′′ + (𝐶𝑜𝑛𝑠𝑡) (1000𝐴𝑝 (𝐿 − 𝑦0 )) −𝛾 ) −
𝑐𝑦𝑙
𝐴𝑐𝑦𝑙 −𝐴𝑟𝑜𝑑
(
𝑚𝑐𝑦𝑙
1
) 𝑃𝑎𝑡𝑚 − (𝑚 ) 𝐹0 = 0 𝑚/𝑠 2
𝑐𝑦𝑙
𝑦0 = 0 𝑚
𝑦0′ = 0 𝑚/𝑠
𝑦0′′ = 0 𝑚/𝑠
39
The system of equations which were solved using the Runge-Kutta method was made up
of the following three equations.
𝐴
𝑠 = 𝑥𝑘′′ = (𝑚𝑐𝑦𝑙 ) ((𝑚𝑝 ⁄𝐴𝑝 )𝑦𝑘′′ + (𝐶𝑜𝑛𝑠𝑡) (1000𝐴𝑝 (𝐿 − 𝑦𝑘 )) –𝛾 ) −
𝑐𝑦𝑙
𝐴𝑐𝑦𝑙 −𝐴𝑟𝑜𝑑
(
𝑚𝑐𝑦𝑙
1
) 𝑃𝑎𝑡𝑚 − (𝑚 ) 𝐹𝑘
(20)
𝑐𝑦𝑙
𝐴
𝑛 = 𝑦𝑘′ = − ( 𝐴𝑐𝑦𝑙 ) 𝑥𝑘′
(14)
′
′′ (𝑡
𝑟 = 𝑥𝑘′ = 𝑥𝑘−1
+ 𝑥𝑘−1
𝑘 − 𝑡𝑘−1 )
(10)
𝑝
Using the above initial conditions and the input variables in Appendix F, the following
equations were solved at for 𝑘 = 1 𝑡𝑜 𝑁 in the order listed below.
𝐴
′′
1. 𝑠1 = (𝑚𝑐𝑦𝑙 ) ((𝑚𝑝 ⁄𝐴𝑝 )𝑦𝑘−1
+ (𝐶𝑜𝑛𝑠𝑡) (1000𝐴𝑝 (𝐿 − 𝑦𝑘−1 )) –𝛾 ) −
𝑐𝑦𝑙
𝐴𝑐𝑦𝑙 −𝐴𝑟𝑜𝑑
(
𝑚𝑐𝑦𝑙
1
) 𝑃𝑎𝑡𝑚 − (𝑚 ) 𝐹𝑘−1
𝑐𝑦𝑙
𝐴
2. 𝑛1 = ( 𝐴𝑐𝑦𝑙 ) 𝑥𝑘′
𝑝
′
′′ (𝑡
3. 𝑟1 = 𝑥𝑘−1
+ 𝑥𝑘−1
𝑘 − 𝑡𝑘−1 )
4. 𝑠2 = (
𝐴𝑐𝑦𝑙
𝑚𝑐𝑦𝑙
𝐴𝑐𝑦𝑙 −𝐴𝑟𝑜𝑑
(
ℎ
′′
) ((𝑚𝑝 ⁄𝐴𝑝 )𝑦𝑘−1
+ (𝐶𝑜𝑛𝑠𝑡) (1000𝐴𝑝 (𝐿 − 𝑦𝑘−1 + 𝑛1 )) –𝛾 ) −
𝑚𝑐𝑦𝑙
𝐴
2
1
) 𝑃𝑎𝑡𝑚 − (𝑚 ) 𝐹𝑘−1
𝑐𝑦𝑙
ℎ
′
5. 𝑛2 = ( 𝐴𝑐𝑦𝑙 ) (𝑥𝑘−1
+ 2 𝑠1 )
𝑝
ℎ
′
6. 𝑟2 = 𝑥𝑘−1
+ 𝑠1 (𝑡𝑘 − (𝑡𝑘−1 + 2))
𝐴
ℎ
′′
7. 𝑠3 = (𝑚𝑐𝑦𝑙 ) ((𝑚𝑝 ⁄𝐴𝑝 )𝑦𝑘−1
+ (𝐶𝑜𝑛𝑠𝑡) (1000𝐴𝑝 (𝐿 − 𝑦𝑘−1 + 2 𝑛2 )) –𝛾 ) −
𝑐𝑦𝑙
𝐴𝑐𝑦𝑙 −𝐴𝑟𝑜𝑑
(
𝑚𝑐𝑦𝑙
𝐴
1
) 𝑃𝑎𝑡𝑚 − (𝑚 ) 𝐹𝑘−1
𝑐𝑦𝑙
ℎ
′
8. 𝑛3 = ( 𝐴𝑐𝑦𝑙 ) (𝑥𝑘−1
+ 2 𝑠2 )
𝑝
ℎ
′
9. 𝑟3 = 𝑥𝑘−1
+ 𝑠2 (𝑡𝑘 − (𝑡𝑘−1 + 2))
40
𝐴𝑐𝑦𝑙
′′
10. 𝑠4 = (𝑚 ) ((𝑚𝑝 ⁄𝐴𝑝 )𝑦𝑘−1
+ (𝐶𝑜𝑛𝑠𝑡) (1000𝐴𝑝 (𝐿 − 𝑦𝑘−1 + 𝑛3 )) –𝛾 ) −
𝑐𝑦𝑙
𝐴𝑐𝑦𝑙 −𝐴𝑟𝑜𝑑
(
𝑚𝑐𝑦𝑙
1
) 𝑃𝑎𝑡𝑚 − (𝑚 ) 𝐹𝑘−1
𝑐𝑦𝑙
𝐴
′
11. 𝑛4 = ( 𝐴𝑐𝑦𝑙 ) (𝑥𝑘−1
+ ℎ𝑠3 )
𝑝
′
12. 𝑟4 = 𝑥𝑘−1
+ 𝑠3 (𝑡𝑘 − (𝑡𝑘−1 + ℎ))
ℎ
13. 𝑥𝑘 = 𝑥𝑘−1 + 6 (𝑟1 + 2𝑟2 + 2𝑟3 + 𝑟4 )
ℎ
′
14. 𝑥𝑘′ = 𝑥𝑘−1
+ 6 (𝑠1 + 2𝑠2 + 2𝑠3 + 𝑠4 )
15. 𝑥𝑘′′ = 𝑠4
ℎ
16. 𝑦𝑘 = 𝑦𝑘−1 + 6 (𝑛1 + 2𝑛2 + 2𝑛3 + 𝑛4 )
17. 𝑦𝑘′ = 𝑚4
18. 𝑦𝑘′′ =
′
𝑦𝑘′ −𝑦𝑘−1
ℎ
1000𝑙
19. 𝑃𝑔,𝑘 = (𝐶𝑜𝑛𝑠𝑡) [(
𝑚3
) 𝐴𝑝 (𝐿 − 𝑦𝑘 )]
−𝛾
20. 𝑃𝑙,𝑘 = (𝑚𝑝 ⁄𝐴𝑝 )𝑦𝑘′′ + 𝑃𝑔,𝑘
Figure I-1: Print Screen of Spread Sheet using Runge-Kutta Method with h=0.005
J.
Hydraulic System Behavior Simulation using FLOWMASTER
Figure 2-7 shows the FLOWMASTER model that was created to simulate the hydraulic
system. The model was created using five components and three nodes.
The
components shown are as follows (1) single-rod double acting cylinder, (2) rigid pipe,
(3) pressure source, (4) air vessel, and (5) cylinder load curve controller. Properties for
41
components one, two and four are listed in Table Table J-1, Table J-2, and Table J-3
respectively. Component three is used to simulate a constant atmospheric pressure, value
given in Table F-1, on the rod side of the actuator. Component five is used to simulate a
force versus time output equal to Equation (19) onto the actuator cylinder. The
properties of these components are listed in the tables below. The reason for choosing
each of these components to simulate the system is explained in section 2.7.
Table J-1: FLOWMASTER Hydraulic System Simulation Component 1: SingleRod Double-Acting Cylinder
Feature
Value
Remark
Port 1 Diameter
1m
Chosen to eliminate friction and pressure drop
Port 2 Diameter
1m
Chosen to eliminate friction and pressure drop
0.07 m
Rod Diameter
Diameter equivalent to 𝐴𝑟𝑜𝑑 in Table F-1
Diameter equivalent to 𝐴𝑐𝑦𝑙 in Table F-1
0.145 m
Cylinder Diameter
3m
Max Rod Travel
Equal to 𝑠 - value in Table F-1
Initial Rod Position
3m
Initial condition used for Hydraulic System
Equal to 𝑚𝑐𝑦𝑙 - value in Table F-1
6380 kg
Mass of Piston
Table J-2: FLOWMASTER Hydraulic System Component 2: Rigid Pipe
Feature
Value
Remark
Absolute
1E-12 mm
Chosen to eliminate friction and pressure drop
Roughness
Friction Factor
0.02
Chosen to eliminate friction and pressure drop
Diameter
1m
Chosen to eliminate friction and pressure drop
Length
1m
Table J-3: FLOWMASTER Hydraulic System Component 4: Air Vessel
Feature
Gas Pressure
Liquid Level
Accumulator
Height
Diameter of Inlet
Base Level above
Reference
Outflow Loss
Inflow Loss
Liquid Type
Polytropic Index
Horizontal crosssectional area
Value
3,867,950 Pa
0m
Remark
Precharge pressure
Initial condition for simulation
2.03718 m
Equal to 𝐿 - value in Table F-1
1m
Chosen to minimize friction and pressure drop
0m
Chosen to eliminate/ eliminate gravitational effects
0
0
Water
1.4
0.04909 m2
Chosen to eliminate friction and pressure drop
Chosen to eliminate friction and pressure drop
Equal to 𝛾 - value in Table F-1
Equal to 𝐴𝑝 - value in Table F-1
42