Running on Water: A Mechanical Design Approach Project Image Here
advertisement

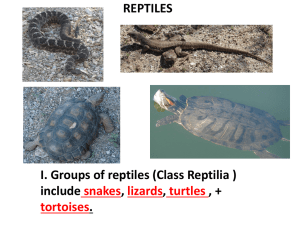
Running on Water: A Mechanical Design Approach Team Members: Jennifer Tolley, Sarah Goral, Deacons Aquinio Advisor:s Dr. Pavlos Vlachos, Dr. Jake Socha, Dr. Sunny Jung, Sam Raben, Rod LaFoy The goal of this bio-inspired project is to gain a better understanding and to mechanically represent the basilisks lizard’s ability to run across the surface of water. This project includes fluid mechanics, biomechanics, biology, and kinematics along with engineering principles to design analytical and mechanical models. The knowledge gained from this project can inspire a light-weight robot with the ability to transition from running on land to running on water. Project Image Here Key Features: Project Scope: To develop a better understanding and mechanically reproduce the forces involved during the locomotion of the basilisk lizard’s hind-limb. Team Photo Here Deliverables: • Research • Analytical modeling in MatLAB • Submiting Animal Protocol, ordering, and animal care • Designing a mechanical model • Designing a water track • Experimentation with both the mechanical model and the live animals • Data analysis.