Document 15072460
advertisement

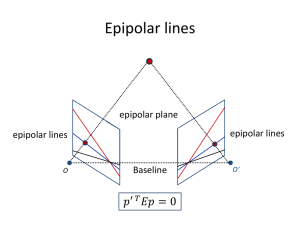
Mata kuliah : T0283 - Computer Vision Tahun : 2010 Lecture 12 Stereo Reconstruction II Learning Objectives After carefully listening this lecture, students will be able to do the following : demonstrate 3D stereo computation by solving pointcorrespondence problems and fundamental matrix. Calculate object-depth information using disparity and triangulation techniques January 20, 2010 T0283 - Computer Vision 3 An algorithm for stereo reconstruction 1. For each point in the first image determine the corresponding point in the second image (this is a search problem) 2. For each pair of matched points determine the 3D point by triangulation (this is an estimation problem) January 20, 2010 T0283 - Computer Vision 4 Epipolar line Epipolar constraint • Reduces correspondence problem to 1D search along an epipolar line January 20, 2010 T0283 - Computer Vision 5 Algebraic representation of epipolar geometry We know that the epipolar geometry defines a mapping / x l point in first image epipolar line in second image • the map only depends on the cameras P, P/ (not on structure) • it will be shown that the map is linear and can be written as January 20, 2010 T0283 - Computer Vision 6 Stereo correspondence algorithms January 20, 2010 T0283 - Computer Vision 7 Problem statement Given: two images and their associated cameras compute corresponding image points. Algorithms may be classified into two types: 1. Dense: compute a correspondence at every pixel 2. Sparse: compute correspondences only for features The methods may be top down or bottom up January 20, 2010 T0283 - Computer Vision 8 Top down matching 1. Group model (house, windows, etc) independently in each image 2. Match points (vertices) between images January 20, 2010 T0283 - Computer Vision 9 Bottom up matching • epipolar geometry reduces the correspondence search from 2D to a 1D search on corresponding epipolar lines • 1D correspondence problem A B C b/ c/ b a January 20, 2010 T0283 - Computer Vision c a/ 10 Example image pair – parallel cameras January 20, 2010 T0283 - Computer Vision 11 First image January 20, 2010 T0283 - Computer Vision 12 Second image January 20, 2010 T0283 - Computer Vision 13 Dense correspondence algorithm Parallel camera example – epipolar lines are corresponding rasters epipolar line Search problem (geometric constraint): for each point in the left image, the corresponding point in the right image lies on the epipolar line (1D ambiguity) Disambiguating assumption (photometric constraint): the intensity neighbourhood of corresponding points are similar across images Measure similarity of neighbourhood intensity by cross-correlation January 20, 2010 T0283 - Computer Vision 14 Intensity profiles • Clear correspondence between intensities, but also noise and ambiguity January 20, 2010 T0283 - Computer Vision 15 Normalized Cross Correlation region A region B write regions as vectors a b vector a January 20, 2010 T0283 - Computer Vision vector b 16 Cross-correlation of neighbourhood regions epipolar line January 20, 2010 T0283 - Computer Vision 17 left image band right image band 1 cross correlation 0.5 0 x January 20, 2010 T0283 - Computer Vision 18 target region left image band right image band 1 cross correlation 0.5 0 x January 20, 2010 T0283 - Computer Vision 19 Why is cross-correlation such a poor measure in the second case? 1. The neighborhood region does not have a “distinctive” spatial intensity distribution 2. Foreshortening effects front-parallel surface imaged length the same January 20, 2010 slanting surface imaged lengths differ T0283 - Computer Vision 20 Limitations of similarity constraint Textureless surfaces Occlusions, repetition Non-Lambertian surfaces, specularities January 20, 2010 T0283 - Computer Vision 21 Results with window search Data Window-based matching January 20, 2010 T0283 - Computer Vision Ground truth 22 Sketch of a dense correspondence algorithm For each pixel in the left image compute the neighbourhood cross correlation along the corresponding epipolar line in the right image the corresponding pixel is the one with the highest cross correlation Parameters size (scale) of neighbourhood search disparity Other constraints uniqueness ordering smoothness of disparity field Applicability textured scene, largely fronto-parallel January 20, 2010 T0283 - Computer Vision 23 Example dense correspondence algorithm left image January 20, 2010 right image T0283 - Computer Vision 24 3D Reconstruction right image January 20, 2010 T0283 - Computer Vision depth map intensity = depth 25 Pentagon example left image right image range map January 20, 2010 T0283 - Computer Vision 26 Rectification For converging cameras epipolar lines are not paralle e January 20, 2010 e/ T0283 - Computer Vision 27 Project images onto plane parallel to baseline epipolar plane January 20, 2010 T0283 - Computer Vision 28 Rectification continued Convert converging cameras to parallel camera geometry by an image mapping Image mapping is a 2D homography (projective transformation) January 20, 2010 T0283 - Computer Vision 29 Example original stereo pair rectified stereo pair January 20, 2010 T0283 - Computer Vision 30 Example: depth and disparity for a parallel camera stereo rig Then, y/ = y, and the disparity Derivation x x/d Note • image movement (disparity) is inversely proportional to depth Z • depth is inversely proportional to disparity January 20, 2010 T0283 - Computer Vision 31 Triangulation January 20, 2010 T0283 - Computer Vision 32 Problem statement Given: corresponding measured (i.e. noisy) points x and x/ , and cameras (exact) P and P/, compute the 3D point X Problem: in the presence of noise, back projected rays do not intersect x x/ rays are skew in space C/ C Measured points do not lie on corresponding epipolar lines January 20, 2010 T0283 - Computer Vision 33 1. Vector solution C C/ Compute the mid-point of the shortest line between the two rays January 20, 2010 T0283 - Computer Vision 34 2. Linear triangulation (algebraic solution) January 20, 2010 T0283 - Computer Vision 35 January 20, 2010 T0283 - Computer Vision 36 3. Minimizing a geometric/statistical error January 20, 2010 T0283 - Computer Vision 37