CS61C : Machine Structures – Datapath Lecture #16 2005-07-18
advertisement

inst.eecs.berkeley.edu/~cs61c/su05
CS61C : Machine Structures
Lecture #16 – Datapath
2005-07-18
Andy Carle
CS 61C L16 Datapath (1)
A Carle, Summer 2004 © UCB
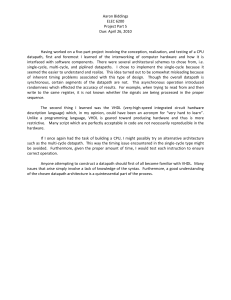
Anatomy: 5 components of any Computer
Personal Computer
Computer
Processor
This week
Control
(“brain”)
Datapath
(“brawn”)
Memory
(where
programs,
data
live when
running)
Devices
Input
Output
Keyboard,
Mouse
Disk
(where
programs,
data
live when
not running)
Display,
Printer
CS 61C L16 Datapath (2)
A Carle, Summer 2004 © UCB
Outline
• Design a processor: step-by-step
• Requirements of the Instruction Set
• Hardware components that match the
instruction set requirements
CS 61C L16 Datapath (3)
A Carle, Summer 2004 © UCB
How to Design a Processor: step-by-step
• 1. Analyze instruction set architecture (ISA)
=> datapath requirements
• meaning of each instruction is given by the
register transfers
• datapath must include storage element for ISA
registers
• datapath must support each register transfer
• 2. Select set of datapath components and
establish clocking methodology
• 3. Assemble datapath meeting requirements
• 4. Analyze implementation of each
instruction to determine setting of control
points that effects the register transfer.
•
5. Assemble the control logic
CS 61C L16 Datapath (4)
A Carle, Summer 2004 © UCB
Step 1: The MIPS Instruction Formats
• All MIPS instructions are 32 bits long. 3 formats:
31
26
op
• R-type
rs
6 bits
31
• I-type
26
op
31
16
rt
5 bits
5 bits
21
rs
6 bits
• J-type
21
5 bits
11
rd
shamt
funct
5 bits
5 bits
6 bits
16
6 bits
• The different fields are:
0
0
address/immediate
rt
5 bits
16 bits
26
op
6
0
target address
26 bits
• op: operation (“opcode”) of the instruction
• rs, rt, rd: the source and destination register specifiers
• shamt: shift amount
• funct: selects the variant of the operation in the “op” field
• address / immediate: address offset or immediate value
• target address: target address of jump instruction
CS 61C L16 Datapath (5)
A Carle, Summer 2004 © UCB
Step 1: The MIPS-lite Subset for today
• ADD and SUB
31
•addU rd,rs,rt
op
31
op
31
•lw rt,rs,imm16
•sw rt,rs,imm16
31
• BRANCH:
•beq rs,rt,imm16
CS 61C L16 Datapath (6)
26
op
6 bits
rs
5 bits
shamt
funct
5 bits
5 bits
6 bits
0
16 bits
0
immediate
5 bits
21
0
rd
16
rt
5 bits
6
immediate
5 bits
21
rs
11
16
rt
5 bits
26
6 bits
5 bits
21
rs
op
16
rt
5 bits
26
•ori rt,rs,imm166 bits
• LOAD and
STORE Word
21
rs
6 bits
•subU rd,rs,rt
• OR Immediate:
26
16 bits
16
rt
5 bits
0
immediate
16 bits
A Carle, Summer 2004 © UCB
Step 1: Register Transfer Language
• RTL gives the meaning of the instructions
{op , rs , rt , rd , shamt , funct} = MEM[ PC ]
{op , rs , rt , Imm16}
= MEM[ PC ]
• All start by fetching the instruction
inst
Register Transfers
ADDU R[rd] = R[rs] + R[rt];
PC = PC + 4
SUBU
R[rd] = R[rs] – R[rt];
PC = PC + 4
ORI
R[rt] = R[rs] | zero_ext(Imm16);
PC = PC + 4
LOAD R[rt] = MEM[ R[rs] + sign_ext(Imm16)];PC = PC + 4
STORE MEM[ R[rs] + sign_ext(Imm16) ] = R[rt];PC = PC + 4
BEQ
CS 61C L16 Datapath (7)
if ( R[rs] == R[rt] ) then PC = PC + 4 +
sign_ext(Imm16)] << 2
else PC = PC + 4
A Carle, Summer 2004 © UCB
Step 1: Requirements of the Instruction Set
• Memory (MEM)
• instructions & data
• Registers (R: 32 x 32)
• read RS
• read RT
• Write RT or RD
• PC
• Extender (sign extend)
• Add and Sub register or extended
immediate
• Add 4 or extended immediate to PC
CS 61C L16 Datapath (8)
A Carle, Summer 2004 © UCB
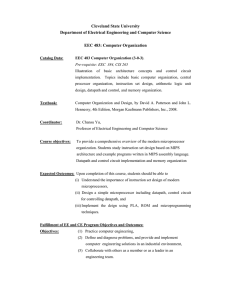
Step 1: Abstract Implementation
PC
Clk
Next Address
ALU
Control
Ideal
Instruction
Instruction Control Signals Conditions
Memory Rd Rs Rt
5 5
5
Instruction
Address
A
Data
Data
32 Address
Rw
Ra
Rb
32
Ideal
Out
32 32-bit 32
Data
Data
Registers B
Memory
In
Clk
32
Clk
Datapath
CS 61C L16 Datapath (9)
A Carle, Summer 2004 © UCB
How to Design a Processor: step-by-step
• 1. Analyze instruction set architecture (ISA)
=> datapath requirements
• meaning of each instruction is given by the
register transfers
• datapath must include storage element for ISA
registers
• datapath must support each register transfer
• 2. Select set of datapath components and
establish clocking methodology
• 3. Assemble datapath meeting requirements
• 4. Analyze implementation of each
instruction to determine setting of control
points that effects the register transfer.
•
5. Assemble the control logic (hard part!)
CS 61C L16 Datapath (10)
A Carle, Summer 2004 © UCB
Step 2a: Components of the Datapath
•Combinational Elements
•Storage Elements
• Clocking methodology
CS 61C L16 Datapath (11)
A Carle, Summer 2004 © UCB
Combinational Logic: More Elements
A
B
32
Adder
•Adder
CarryIn
32
Sum
Carry
32
Select
B
32
MUX
•MUX
A
32
Y
32
OP
A
CS 61C L16 Datapath (12)
B
ALU
•ALU
32
32
Result
32
A Carle, Summer 2004 © UCB
ALU Needs for MIPS-lite + Rest of MIPS
• Addition, subtraction, logical OR, ==:
ADDU R[rd] = R[rs] + R[rt]; ...
SUBU R[rd] = R[rs] – R[rt]; ...
ORI R[rt] = R[rs] | zero_ext(Imm16)...
BEQ
if ( R[rs] == R[rt] )...
• Test to see if output == 0 for any ALU
operation gives == test. How?
• P&H also adds AND,
Set Less Than (1 if A < B, 0 otherwise)
• ALU follows chap 5
CS 61C L16 Datapath (13)
A Carle, Summer 2004 © UCB
Storage Element: Idealized Memory
Write Enable
Address
• Memory (idealized)
Data In
• One input bus: Data In
32
• One output bus: Data Out
Clk
DataOut
32
• Memory word is selected by:
• Address selects the word to put on Data Out
• Write Enable = 1: address selects the memory
word to be written via the Data In bus
• Clock input (CLK)
• The CLK input is a factor ONLY during write
operation
• During read operation, behaves as a
combinational logic block:
-
Address valid => Data Out valid after “access time.”
CS 61C L16 Datapath (14)
A Carle, Summer 2004 © UCB
Storage Element: Register (Building Block)
• Similar to D Flip Flop except
- N-bit input and output
- Write Enable input
• Write Enable:
- negated (or deasserted) (0):
Data Out will not change
- asserted (1):
Data Out will become Data In
CS 61C L16 Datapath (15)
Write Enable
Data In
N
Data Out
N
Clk
A Carle, Summer 2004 © UCB
Storage Element: Register File
• Register File consists of 32 registers:
• Two 32-bit output busses:
busA and busB
• One 32-bit input bus: busW
• Register is selected by:
RW RA RB
Write Enable 5 5 5
busW
32
Clk
busA
32
32 32-bit
Registers busB
32
• RA (number) selects the register to put on busA (data)
• RB (number) selects the register to put on busB (data)
• RW (number) selects the register to be written
via busW (data) when Write Enable is 1
• Clock input (CLK)
• The CLK input is a factor ONLY during write operation
• During read operation, behaves as a combinational
logic block:
-
RA or RB valid => busA or busB valid after “access time.”
CS 61C L16 Datapath (16)
A Carle, Summer 2004 © UCB
Administrivia
• Turn in your HW 45 in class!
• Project 2 due Sunday
• No extensions, No Excuses
• Hope you’ve already started
• Midterm Re-Grades
• Review the key that will be posted after
lecture
- I decided to hold up to let you have
maximum fun with the HW question
• If you feel you have a legit complaint,
write up a description of the error and
staple it to the front of your test
- Hand this in to Andy or a TA
CS 61C L16 Datapath (17)
A Carle, Summer 2004 © UCB
Step 3: Assemble DataPath meeting requirements
• Register Transfer Requirements
Datapath Assembly
• Instruction Fetch
• Read Operands and Execute Operation
CS 61C L16 Datapath (18)
A Carle, Summer 2004 © UCB
3a: Overview of the Instruction Fetch Unit
• The common RTL operations
• Fetch the Instruction: mem[PC]
• Update the program counter:
- Sequential Code: PC = PC + 4
- Branch and Jump: PC = “something else”
Clk
PC
Next Address
Logic
Address
Instruction
Memory
CS 61C L16 Datapath (19)
Instruction Word
32
A Carle, Summer 2004 © UCB
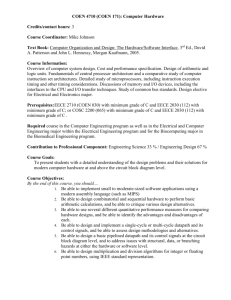
3b: Add & Subtract
• R[rd] = R[rs] op R[rt] Ex.: addU rd,rs,rt
• Ra, Rb, and Rw come from instruction’s Rs, Rt,
26
21
16
11
6
and Rd fields 31
op
6 bits
rs
5 bits
rt
5 bits
rd
5 bits
shamt
5 bits
funct
6 bits
0
• ALUctr and RegWr: control logic after decoding
the instruction
Rd Rs Rt
RegWr 5 5 5
32 32-bit
Registers
busA
32
busB
32
ALU
busW
32
Clk
Rw Ra Rb
ALUctr
Result
32
• Already defined register file, ALU
CS 61C L16 Datapath (20)
A Carle, Summer 2004 © UCB
Clocking Methodology
Clk
.
.
.
.
.
.
.
.
.
.
.
.
• Storage elements clocked by same edge
• Being physical devices, flip-flops (FF) and
combinational logic have some delays
• Gates: delay from input change to output change
• Signals at FF D input must be stable before active clock
edge to allow signal to travel within the FF, and we have
the usual clock-to-Q delay
• “Critical path” (longest path through logic)
determines length of clock period
CS 61C L16 Datapath (21)
A Carle, Summer 2004 © UCB
Register-Register Timing: One complete cycle
Clk
New Value
PC Old Value
Rs, Rt, Rd,
Op, Func
Old Value
ALUctr
Old Value
RegWr
Old Value
busA, B
Old Value
busW
Old Value
Instruction Memory Access Time
New Value
Delay through Control Logic
New Value
New Value
Register File Access
Time New Value
ALU Delay
New Value
Rd Rs Rt
RegWr5 5 5
CS 61C L16 Datapath (22)
busA
32
busB
32
ALU
busW
32
Clk
Rw Ra Rb
32 32-bit
Registers
ALUctr
Register Write
Occurs Here
Result
32
A Carle, Summer 2004 © UCB
3c: Logical Operations with Immediate
• R[rt] = R[rs] op ZeroExt[imm16] ]
31
26
21
op
rs
31 6 bits
5 bits
16
rt
5 bits 16 15 rd?
11
0
immediate
16 bits
0
ALU
immediate
0000000000000000
Rd
Rt
RegDst
16 bits
16 bits
Mux
Rt register read??
Rs Rt? What about
ALUct
RegWr 5 5
5
r
busA
Rw Ra Rb
busW
32
Result
32 32-bit
32
Registers
32
busB
Clk
32
Mux
16
ZeroExt
imm16
32
ALUSrc
• Already defined 32-bit MUX; Zero Ext?
CS 61C L16 Datapath (23)
A Carle, Summer 2004 © UCB
3d: Load Operations
• R[rt] = Mem[R[rs] + SignExt[imm16]]
Example: lw rt,rs,imm16
31
26
op
rs
6 bits
Rd
RegDst
Mux
RegWr 5
32
Clk
0
rt
5 bits
immediate
5 bits
16 bits
Rt
Rs Rt
5
5
Rw Ra Rb
32 32-bit
Registers
W_Src
32
busB
32
32
ExtOp
32
MemWr
??
ALUSrc
Data In
32
Clk
Mu
x
CS 61C L16 Datapath (24)
busA
Mux
16
ALUctr
Extender
imm16
16
ALU
busW
21
WrEn Adr
Data
Memory
32
A Carle, Summer 2004 © UCB
3e: Store Operations
• Mem[ R[rs] + SignExt[imm16] ] = R[rt]
Ex.: sw rt, rs, imm16
31
26
21
op
rs
6 bits 5 bits
Rd Rt
RegDst
Mux
RegWr5 5
rt
5 bits
32
ExtOp
CS 61C L16 Datapath (25)
W_Src
32
Data In32
Clk
WrEn Adr
32
Data
Memory
Mux
Extender
16
immediate
16 bits
ALUctr MemWr
ALU
busA
Rw Ra Rb
32
32 32-bit
Registers busB
32
imm16
0
Rs Rt
5
Mux
busW
32
Clk
16
ALUSrc
A Carle, Summer 2004 © UCB
3f: The Branch Instruction
31
26
op
6 bits
21
rs
5 bits
16
rt
5 bits
0
immediate
16 bits
• beq rs, rt, imm16
• mem[PC] Fetch the instruction from memory
• Equal = R[rs] == R[rt] Calculate branch condition
• if (Equal) Calculate the next instruction’s address
- PC = PC + 4 + ( SignExt(imm16) x 4 )
else
- PC = PC + 4
CS 61C L16 Datapath (26)
A Carle, Summer 2004 © UCB
Datapath for Branch Operations
• beq rs, rt, imm16
Datapath generates condition (equal)
26
op
6 bits
21
00
Adder
32
PC
Mux
Adder
PC Ext
imm16
0
rs
rt
immediate
5 bits 5 bits
16 bits
Inst Address
nPC_sel
4
16
Rs Rt
5
busA
Rw Ra Rb
32
32 32-bit
Registers
busB
32
Cond
RegWr 5 5
busW
Clk
Equal?
31
Clk
• Already MUX, adder, sign extend, zero
CS 61C L16 Datapath (27)
A Carle, Summer 2004 © UCB
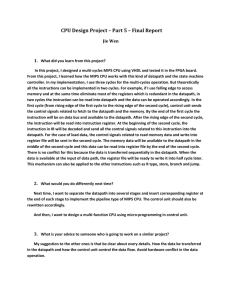
Putting it All Together:A Single Cycle Datapath
Instruction<31:0>
<0:15>
<11:15>
Rs
<16:20>
<21:25>
Inst
Memory
Adr
Rt Rd Imm16
RegDst
ALUctr MemWr MemtoReg
Equal
Rt
Rd
1 0
Rs Rt
RegWr 5 5 5
busA
Rw
Ra
Rb
=
busW
32
32 32-bit
0
32
32
Registers busB
0
32
Clk
32
WrEn Adr 1
1 Data In
Data
imm16
32
Clk
16
Clk Memory
nPC_sel
imm16
Mux
ALU
Extender
PC Ext
Adder
Mux
PC
Mux
Adder
00
4
ExtOp ALUSrc
CS 61C L16 Datapath (28)
A Carle, Summer 2004 © UCB
Peer Instruction
A. Our ALU is a synchronous device
B. We should use the main ALU to
compute PC=PC+4
C. The ALU is inactive for memory
reads or writes.
CS 61C L16 Datapath (29)
A Carle, Summer 2004 © UCB
Summary: Single cycle datapath
°5 steps to design a processor
• 1. Analyze instruction set => datapath requirements
• 2. Select set of datapath components & establish clock
methodology
• 3. Assemble datapath meeting the requirements
• 4. Analyze implementation of each instruction to
determine setting of control points that effects the
register transfer.
Processor
• 5. Assemble the control logic
°Control is the hard part
°Next time!
CS 61C L16 Datapath (30)
Input
Control
Memory
Datapath
Output
A Carle, Summer 2004 © UCB