Tactile Teacher: Toward Sensing Taps When Playing Piano
advertisement

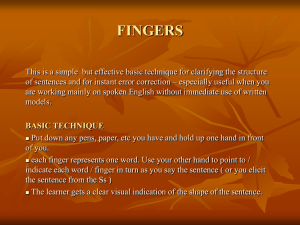
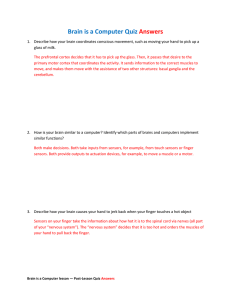
Tactile Teacher: Toward Sensing Taps When Playing Piano First Author Name (Blank for Blind Review) Affiliation (Blank for Blind Review) Address (Blank for Blind Review) e-mail address (Blank for Blind Review) ABSTRACT In a piano lesson, a student often imitates how her teacher is playing in terms of speed, dynamics, and fingering. We seek to convey the touch sensations in piano lessons between a teacher and a student by sensing the teacher's keystrokes and then tapping the student's fingers appropriately. Here, we propose an implementation to sense finger taps on hard surfaces by using an instrumented glove. Since finger taps generate acoustic signals and cause vibrations on the palm, we embed two vibration sensors on the glove and use machine learning to analyze the data from the sensors. After a brief training procedure, this prototype can accurately identify which fingers are being tapped in real time. Second Author Name (Blank for Blind Review) Affiliation (Blank for Blind Review) Address (Blank for Blind Review) e-mail address (Blank for Blind Review) The design of the sensing glove is another challenging task. Pianists usually do not like additional sensors on their fingers since it would affect dexterity. Thus, we will need to avoid additional materials on fingers and deploy as few sensors as possible on the palm portion of the glove. To detect fingering, we employ sensors mounted on the back of the hand and a machine-learning approach to distinguish fingers from the input data. Since fingers are not necessary in the same position while playing piano, we also create a training procedure that captures these factors. Author Keywords Wearable Computing, Sensing, Finger Input. ACM Classification Keywords H5.m. Information interfaces and presentation (e.g., HCI): Miscellaneous. General Terms Human Factors, Experimentation. INTRODUCTION Transferring tactile sensations from one’s fingers to another’s fingers is a challenging task, especially for those applications that require immediate responses. The task includes the sensing of speed, dynamics, and fingering on the originator hand, and the rendering of sensation on the receiving hand. Mobile Music Touch [3] and ConcertHands [6] employ vibration motors to convey the tactile sensations for piano teaching purposes. However, the data used for output is preset in the program and lacks spontaneity as well as artistic aspects in terms of timing and strength of hitting the keys. In a piano lesson, a teacher often asks students to imitate the timing of hitting the keys and the volume of each note. Except the sound and vision, we propose an implementation that adds an additional medium, touch sensations, for assisting students in piano lessons. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, or republish, to post on servers or to redistribute to lists, requires prior specific permission and/or a fee. UbiComp ‘13, Sep 8–Sep 12, 2013, Zurich, Switzerland. Copyright 2013 ACM 978-1-4503-1770-2/13/09...$10.00. Figure 1. Left: The prototype consists of two sensors. The orange region is the left sensor while the blue region is the right sensor. Right: The glove that senses taps with two vibration sensors, and a Maple Mini Board for initial data processing. PREVIOUS WORK The primary objective of this project is to provide an always-available input device for capturing finger taps that can be applied to regular pianos. There are various approaches that can help achieve the goal. For instance, using computer vision could help us detect the finger movements and the location of the fingers [1]. However, this approach usually requires intensive computation and is error prone. An alternative method is to wear sensors on hands or arms for detecting motion. We have seen many different approaches in this domain. Sensing muscle movements by using EMG is one feasible method for detecting finger movements as an always-available input device [7]. However, EMG sensors cannot help recognize accurate timing when a finger is tapping on hard surfaces. The other approach proposed by Chris Harrison is to wear an array of vibration sensors on arms for detecting bioacoustic signals on the skin [2]. In his implementations, users need to train the system every time before use since the locations of the sensors are varied when wearing the armband. We propose a lightweight sensing glove with a fun way for training the system to distinguish fingers and recognize the strength of the finger taps. SENSING AND PROCESSING As shown in Figure 1, we employ a Maple Mini board (from LeafLabs) [4] to sample two ADC channels at 6.5KHz from piezo vibration sensors and send the data to a computer through USB for further data processing before running a machine learning program for classification. This data processing includes exponential smoothing and filtering. When the smoothed data of either channel exceeds a threshold, the samples around the threshold from both channels are considered as a tap event. As shown in Figure 2, each tap comes with the tallest spike and one or two shorter spikes, each of which lasts for about 12-17ms (5883Hz). To ensure that the samples influenced by a tap event are filtered, the key parameters, such as the threshold, smoothing factor, and number of samples around the exceeding time, are tuned carefully. Classified as Actual T I M R P Actual finger taps in a training session Thumb 16 3 1 0 0 28 Index 0 20 0 0 0 32 Middle 0 0 19 0 1 36 Ring 0 0 0 20 0 18 Pinky 1 0 0 1 18 10 Table 1. The classification results after a user plays “Ode to Joy” twice to train the system. In a test session, each finger taps 20 times on the piano keys. results of the training data and independent test data. In a testing session, the tester taps 20 times per finger for getting the results. Since each person’s hands are different, the trained model cannot be re-used for different people. However, a user would not need to train the system again if she wears the glove in the same position on the same hand. FUTURE WORK Figure 2. The waves when a user taps twice on their index finger. The orange line represents the left sensor while the blue lines represents the right sensor. After smoothing and filtering, sixty features can be extracted from each input event. These features include six averages and square averages of each channel and the ratios between them. The system also computes a 256-point FFT for transforming input from the time domain to frequency domain. Because the frequency of the tap waveform is roughly between 50 to 100 Hz, only the lower nine bins (23 Hz each) are used for computing the normalized decibels (36 features). Finally, we extract 18 features from calculating the ratios of respective values of the two channels. The 60 features are then classified using the Support Vector Machine (SVM) package from Weka [5]. The latency of computing the data for each tap event is about 1ms to 2ms. MACHINE LEARNING PROCEDURE AND THE RESULT To train the system for classifying the fingering, we ask users to play “Ode to Joy” twice for capturing the real tapping position when the fingers are moving on the keyboards. Since the system knows the order of the notes and the fingering of each note that the user would use, it can map the samples that exceed the threshold to specific fingers in the entire song for training. The entire process is automated so that the user only needs to play the song when the system says start. We tested the system internally with two participants and achieve about 94% accuracy from the We have implemented an easy way to recognize the finger taps with a couple of sensors. However, there are still few tasks we would like to achieve in the near future. For instance, when a pianist plays a piece of music, she often uses multiple fingers to play chords. Our current implementation only recognizes single finger taps when the user plays piano. Thus, sensing multiple simultaneous taps is our next major tasks. In addition, we are planning to test the prototype in a piano lesson to understand how the additional sensation influences the student to learn how to play piano. REFERENCES 1. Erol, A., Bebis, G., Nicolescu, M., Boyle, R.D., and Twombly, X. A Review on Vision-Based Full DOF Hand Motion Estimation. In Proc. Computer Vision and Pattern Recognition - Workshops 2005. IEEE, 75–82. 2. Harrison, C., Tan, D., and Morris, D. Skinput: appropriating the body as an input surface. In Proc. CHI 2010, ACM, 453–462. 3. Huang, K., Starner, T., Do, E., et al. Mobile Music Touch: mobile tactile stimulation for passive learning. In Proc. CHI 2010, ACM, 791–800. 4. LeafLabs. The Maple Mini. [Accessed: 30-March-2013] http://leaflabs.com/. 5. Machine Learing Group at the University of Waikato. Weka. http://www.cs.waikato.ac.nz/ml/weka/. [Accessed: 30-March-2013] 6. Rubato Productions. ConcertHnads System. http://concerthands.com/. [Accessed: 30-March-2013] 7. Saponas, T.S., Tan, D.S., Morris, D., Balakrishnan, R., Turner, J., and Landay, J.A. Enabling always-available input with muscle-computer interfaces. In Proc. UIST 2009, ACM, 167–176.