feeling of ownership and Quality of Service (QoS).
advertisement
.")
Extending End-to-End Optical Service Provisioning:
Network Model and Applications
Yong Zhu, Admela Jukan and Mostafa Ammar
Georgia Institute of Technology, Atlanta, GA
Email:{yongzhu, ajukan, ammar}@cc.gatech.edu
Abstract-- In this paper, we present a novel network model as a
tool to solve a generalized category of problems related to the
extended end-to-end provisioning. For one service provider,
extending end-to-end provisioning may imply provisioning a
service across its national backbone to interconnect two metro
networks of a specific customer. For another, end-to-end may
include portions of metro and access networks. In the future, it is
not unrealistic to believe that automatic end-to-end service
provisioning will extend down to the end-users, whether business
or residential customers. We model these, and similar scenarios,
with the multi-segment network model, where the notion of
segments refers to any portion of an optical network that requires
particular consideration for wavelength routing and resource
allocation such as sub-networks characterized by different levels
of traffic aggregation, different administrative areas or logical
segments of the optical control plane. To this aim, we first present
the multi-segment optical network model and give a rationale of
how this model can provide such a rich capability. We then
demonstrate the ability of the multi-segment model by showing its
applications in three different end-to-end provisioning scenarios:
1) multi-vendor scenario, 2) control plane routing information
exchange scenario, and 3) multi-granularity/multi-administrative
scenario. The numerical results related to these three scenarios
illustrates the applicability of the multi-segment model to
architect control plane for extended provisioning and network’s
coverage.
Key words- System design
I.
INTRODUCTION
Increasing automation and reducing human
intervention in key network functions such as autodiscovery, service provisioning and restoration are
critical steps required to improve the speed of service
delivery, increase network efficiency and capacity
utilization, and minimize inaccuracies and errors. By
simplifying the integration of these functions with the
carriers’ Operation Support Systems (OSS), automation
can be directly translated into large savings and
increased revenue opportunities for service providers.
These improvements greatly increase as automation is
extended from the core of the network (i.e., backbone)
to the metro and access networks, where connections are
added at a greater frequency and traffic churn is higher.
From the user’s1 perspective, automation will enable an
increase in the customer’s level of control on the
connection request and set up operations, improve the
1
The terms “user” and “customer” are utilized to describe any
recipients of the bandwidth connection, e.g., a metro regional
network connected to a core/backbone network or an end-user
connected to a metro access network.
feeling of ownership and Quality of Service (QoS).
Significant work has recently been carried out to
generate the tools required to increase such automation.
Among them, the definition of standard control plane
architectures for network control and user-to-network
and network-to-network interfaces (UNI and NNI,
respectively) for inter-domain communication have
enabled the development of major building blocks [1,2].
With the enhanced potential for automation, the term
end-to-end has been increasingly utilized by service
providers when describing their capabilities. The real
meaning of such expression, however, depends not only
on the network’s coverage and extension but also on the
functionalities offered by the deployed infrastructure
and the established carrier’s processes and procedures.
For one service provider, end-to-end may imply
provisioning a service across its national backbone to
interconnect two metro networks of a specific customer
(in this case a carrier providing services in multiple
metropolitan regions). For another, end-to-end may
include portions of metro and access networks. In the
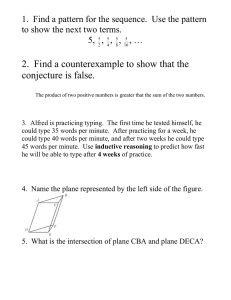
future, it is not unrealistic to believe that automatic endto-end service provisioning will extend down to the endusers, whether business or residential customers.
Together with corporate strategic decisions, the specific
carrier’s circumstances will determine the distinct
evolution path required to expand such functionalities
into the network. This is illustrated in Fig. 1.
In this paper, we present a novel network model as a
tool to solve a generalized category of problems related
to end-to-end provisioning over interconnected optical
networks (“extended”). This model is referred to as
multi-segment network model, where the notion of a
segment refers to any portion of an optical network that
requires particular consideration for end-to-end
provisioning, e.g., sub-networks characterized by
different levels of traffic aggregation, different
administrative areas, or logical segments of the optical
control plane. To illustrate this, we will particularly
consider the control issues related to the provisioning
and show that, for every segments of the transport
network, there is a corresponding segment of the control
(logical view), which has a large impact on the network
performance. This paper reports a number of strategies
that can be used to extend optical service provisioning,
network’s coverage, and the functionality offered by the
deployed infrastructure.
The rest of this paper is organized as follows. Section
II provides the multi-segment optical network model,
addresses particular parameters related to the definitions
of segments and gateways, and discusses traffic locality
issues, both from the viewpoint of the transport and the
control planes. Section III demonstrates the ability of
multi-segment model by showing its applications in
three representative end-to-end provisioning scenarios: 1)
multi-vendor scenario, 2) control plane routing
information exchange scenario, and 3) multigranularity/multi-administrative scenario. Section IV
presents the performance study and numerical results
related to call blocking, efficiency of the routing
information exchange and bandwidth utilization (for
multi-granularity networks), for the three scenarios
previously described. Section V gives the conclusion
and discusses future work.
B3
B2
Backbone network
B1
Metropolitan network
M2
M1
Level 1 POP
A3
A1
A2
A3.2
A1.3
A2.2
Enterprise
Campus
Residential
End User
Optical Cross Connect
High granularity wavelength router
Fig. 1. End-to-end provisioning over different networking segments.
II.
MULTI-SEGMENT OPTICAL NETWORK MODEL
An optical network consists of three major building
blocks: transport plane, management plane and control
plane. These elements complement each other in
providing the critical functions required for the network
operation. The collection of transport and switching
network elements responsible for delivering the
bandwidth connectivity to enable data transmission
between the network users is referred to as transport (or
data) plane. As shown in Fig. 1, the infrastructure
required to build an efficient transport plane has evolved
differently in the backbone, metro and access networks,
consistent with their specific needs in terms of network
size, traffic properties (granularity and capacity),
distances (i.e., optical reach), demand pattern (i.e., hub
vs. mesh), and protection and restoration (i.e., ring
protection vs. mesh restoration). Recent developments in
the transport plane have significantly amplified the
needs for increased automation in resource management
and faster end-to-end service provisioning and
restoration. To this aim, several new functions have
been introduced while others have been automated in
order to provide a more efficient control of the deployed
network elements. These activities, typically carried out
in a distributed (or de-centralized) fashion, include autodiscovery of network resources, routing, “on-demand”
service provisioning and recovery of transport plane
failures. The combination of these functions is referred
to as control plane. The model presented in this section
focuses on the control plane piece. All the parameters
presented for the transport plane will be used to model
the control plane functions. Management plane is out of
the scope of this work.
The multi-segment network model presented next
includes formal description of three key components: 1)
a single segment model with segment specific properties,
2) segment interconnections through gateways, and 3)
traffic.
A. Networking segments
Each networking segment represents a portion of an
optical network that requires particular consideration for
end-to-end provisioning and is characterized by
following parameters.
Segment topology (G): The topology of each segment is
a connected graph G=(V,E), where the set of vertices V,
and set of unidirectional edges E represent nodes and
links in the segment respectively. We further divide the
nodes into internal nodes (VI) and border nodes (VB).
Nodes that only have segment internal links are internal
nodes and nodes that have links to outside the segment
are border nodes, i.e.,
VB = {u | u ∈ V , ∃(u , v) ∉ E}
VI = V − V B
Weight function (w): Associated with each edge e ∈ E ,
there is a non-negative weight w(e) , representing the
cost to route the connection through this edge. As we
will see in the next section, weights can be assigned to
reflect specific applications and policies.
Segment specific properties (P): Associated with each
segment, there are a set of segment specific properties
that have impacts on end-to-send provisioning. These
properties include both the transport plane properties
and control plane properties. For simplicity, we will
assume throughout the paper that each control segment
also refers to a transport plane segment. This is not
generally the case. For example, a transport plane can
operate on a sub-wavelength level, i.e., 4 STS-1 can be
separately allocated. However, for faster restoration, the
control plane can be designed for wavelength level only.
This, and similar scenarios will be subject of our future
research.
We will next focus on the parameters that are used in
the control plane, designed to specifically take into
consideration their corresponding transport plane
properties. While the control plane specific properties
are the various segment-internal routing information
exchange scheme (I-RIE), internal routing protocols (IRP) or internal administrative policies, the following are
the parameters that reflect the transport plane properties.
Wavelength capacity (f): Associated with each edge
e ∈ E , there is a strictly positive wavelength
capacity f (e) , representing the total number on
wavelength carried on the corresponding link. The
wavelength capacity function extends to the whole
segment if it is homogeneous within the segment.
Wavelength set ( S w ): Associated with each edge
e ∈ E , there is a set of wavelength indexes S w (e) ,
representing the set of wavelengths carried on the
corresponding link. The wavelength set function
extends to the whole segment if it is homogeneous
within the segment.
Traffic granularity (TG): Associated with each edge
e ∈ E , there is a set of strictly positive traffic
granularities TG (e) , representing the set of
bandwidths units that can be carried on the
corresponding link. The traffic granularity function
extends to each vertices v ∈ V and the whole network
as follows:
TG (v) = (
tTG(u, v)) t ( tTG(v, u))
u∈V , (u , v )∈E
u ∈V , ( v , u )∈E
TG (G ) = tTG (e)
e∈E
Wavelength adaptation capability (wac): Associated
with each vertex v ∈ V ,
adapting
1
wac(v) =
non
− adapting
0
Output wavelength set ( S w′ ): Associated with each
edge e = (u, v) ∈ E , there is a set of wavelength
indexes S w′ (e) representing the set of wavelengths
that can be converted into by u if it is the
wavelength converter, S w′ (e) is empty otherwise.
Multiplexing/de-multiplexing
(mux/de-mux)
capability (mxc): Associated with each vertex v ∈ V ,
mux / demux
1
mxc(v) =
0
non
− mux / demux
Segment Index (SID): Each segment has a segment
index which is globally unique among all segments.
Type (T): The type of the segment identifies specific
considerations of the sub-network for which the segment
is used to model. The following two basic types will be
used: transport plane type (t) and the control plane type
(c). Transport plane segment type refers to a collection
of transport and switching network elements responsible
for delivering the bandwidth connectivity to enable data
transmission between the network users, e.g., backbone,
metro or access networks. The control plane segment, on
the other hand, is a logical concept. It represents a set of
functions, e.g. vendor- or carrier-specific network.
v1
v4
v5
v6
v4
s1
v2
s4
v1
v3
v2
v3
v5
v1
s2
v2
v3
v4
v1
s3
v2
v3
Fig. 2. Multi-segment network, gateway are circled using dash lines.
B. Gateways
The multi-segment network is composed of a number
of segments S = {si } , i=1,2,…Q and a set of gateways
GW. Neighboring segments are interconnected through
gateways. Each gateway gw∈ GW contains two border
nodes from different segments connected by one bridge
link. We characterize a gateway as gw=(id, si, u, sj, v),
where id denotes the index of the gateway (for
numbering multiple gateways connecting the same pair
of segments), si, and sj are starting and ending segment
interconnected through the gateway respectively and
u ∈ VB (i ) , v ∈ VB ( j ) are the starting and ending vertexes
(border nodes) of the bridge link respectively. The
interconnection of segments is captured in the segment
incidence matrix Pij i, j=1,2,…,Q as follows:
1 ∃gw ∈ GW , gw = (id , si , u , s j , v)
Pij =
otherwise
0
Under the multi-segment model, the topology of all
segments and gateway bridge links form the multisegment topology G=(V,E) which is defined as follows:
V = V(i )
si ∈S
E = ( E(i ) ) {(u , v) | ∃id , si , s j , (id , si , u , s j , v) ∈ GW }
si ∈S
Each network node can be addressed as (si,u),
si ∈ S , u ∈ V(i ) . For each gateway gw=(id, si, u, sj, v), we
denote node (si,u) as the egress border node of segment
si, and (sj,v) as the ingress border node of segment sj. Fig.
2 shows an example of a multi-segment network
composed of 4 segments interconnected through 4
gateways, in which the gateway connecting segment s1
and s2 is (id, s1, v2, s2, v1). Each gateway gw ∈ GW also
has a non-negative weight w(gw) , representing the cost
to carry the connection through this gateway.
Associated with each gateway gw ∈ GW , there are
various adaptation functions A(gw), which enables
gateway to bridge multiple segments for end-to-end
provisioning. We have different sets of gateway
adaptation capabilities used for transport plane and
control plane segments.
Consider two segments interconnected through a
gateway. Based on the relationship of wavelength
capacity ( f (1) and f ( 2) ), wavelength set ( S w (1) and S w( 2) )
and the output wavelength set S w′ (1) , the following
transport plane adaptation functions can be defined:
Type-of-wavelength adaptation (e.g. various levels
of wavelength conversion including full wavelength
conversion, selective wavelength conversion)
Number-of-wavelengths adaptation (e.g. wavelength
merging/splitting)
Traffic granularity adaptation (e.g. sub-wavelength
level mux/demux)
This is summarized in Table 1.
TABLE I.
POSSIBLE GATEWAY TRANSPORT PLANE ADAPTATION
SCENARIOS
Type of wavelength adaptation
S w(1) ⇒ S w′ (1) ≠ S w( 2)
Wavelength merging/splitting
Traffic granularity adaptation
Merging/Splitting ratio m:n/n:m
Mux/de-mux between different
traffic granularities
In the scenarios with wavelength adaptation, the
simplest example is the full range wavelength
conversion, i.e., the gateway is equipped with
wavelength converters such that any incoming
wavelength can be converted into any outgoing
wavelength, subject to their occupancy only. Generally,
in the case of type-of-wavelength adaptation, we
consider the scenario that gateways are capable of
selective wavelength conversion according to the types
of wavelength on consecutive segments, i.e., a gateway
can only convert incoming wavelength set S w into
outgoing wavelength set S w′ which is a subset of the
complete wavelength range. These and similar cases
were the subject of intensive research in the past [3-5].
Wavelength merging occurs when m wavelengths can
be merged together into n wavelengths (m>n). Similarly,
wavelength splitting is the function where n wavelengths
can be split into m (m>n), while preserving their callspecific properties. This scenario, while technologically
challenging, is motivated by the recent advances in IPoptical integration, in particular “optical MPLS” [12].
The enhancements to the existing signalling protocols
for traffic engineering purposes will allow a label-
switched path (LSP) to be explicitly specified across the
optical core. There are several similarities between LSPs
and optical paths, e.g., label swapping and optical
switching separation of data and control planes. In LSPs
the strength lies in nested label management according
to the traffic flows that share a set of common
characteristics for which the label merging, and the label
push and pop functions are needed. While there are no
such analogs in optical switches,
in terms of
functionality
we
can
assume
wavelength
merging/splitting performs as “optical push and pop”.
Another application of wavelength merging/splitting can
be optical network multicast.
Wavelength merging/splitting is different form the
traffic granularity adaptation. The latter is used to
model mux/de-mux nodes in networks with various
levels of traffic granularities (often refer to as multilayer networks or networks with traffic grooming).
Gateways adaptation function here is to multiplex or demultiplex traffics among different granularities.
Specific to the control plane and typically
independent of the transport plane are the adaptation of
routing information on gateways between neighboring
segments. For backbone/metro networks, the metro and
backbone networks may not share common routing
protocols and detailed routing information in the metro
network may not available to the backbone. The choice
of information exchange schemes, as will be shown later
in this paper, has a large impact on the success of endto-end provisioning.
C. Traffic locality
In the multi-segment model, traffic is represented as
(tid, sS, vS, sD, vD, Pt), where tid is index of the traffic,
node nS=(sS,vS) and nD=(sD,vD) are the source and
destination of the traffic respectively and Pt is the
properties of the traffic such as bandwidth requirement
(b), service level agreement (SLA).
In multiple WDM networks interconnected by
gateways, the traffic may originate from and be destined
to any network. We refer to traffic whose source and
destination are within the same segment as local traffic,
i.e., s S = s D . Traffic whose source and destination belong
to different segments is called global traffic, i.e., s S ≠ s D .
Global traffic will travel a number of segments and the
gateways connecting them. For example in Fig. 2, the
end-to-end path for global traffic from node (s1,v5) to
(s4,v3) is (s1,v5)→(s1,v4)→(s4,v1)→(s4,v2)→(s4,v3), where
(s1,v5) → (s1,v4) and (s4,v1) → (s4,v2)→ (s4,v3) are segment
internal paths of s1 and s4 respectively and (s1,v4)→(s4,v1)
is the gateway connecting them.
Obviously, interconnected networks have to carry
both kinds of traffic. In multi-segment wavelength
routing, detailed routing information may not be
available outside the local segment. For example,
segments represent different carriers do not exchange
full information and in multi-layer network, resources in
one layer may be transparent to the other. In these
scenarios, local and global traffic have to be treated
differently.
Typically,
local
traffic
can be
accommodated regardless of the status of other segments.
In contrast, global traffic must be accommodated with
the collaboration among multiple segments since the
source and destination of global traffic belong to
different segments. This paper focuses on end-to-end
service provisioning of the global traffic and we assume
that the local traffic is primarily accommodated with
segment internal mechanisms.
III.
PROVISIONING PROBLEM DEFINED FOR MULTISEGMENT MODEL
In order to provisioning optical end-to-end services,
we use the multi-segment problem formulation. The
multi-segment problem can be defined based the
applications of transport plane and control plane
separately.
A. Multi-segment Wavelength routing problem
Based on the transport plane parameters, the multisegment wavelength routing problem can be considered
as a task of finding a path and wavelengths along the
path suitable to a given connection request, subject to a
number of constraints and in the sense that such a path
uses a minimal network resources. It can be defined as
the following optimization problem.
Given transport plane input parameters: (The
information regarding segment topology and resources
availability within the segment is only available when
the we have unified control plane.)
Segment topologies G(i ) for each segment si ∈ S
Resource availability f (i ) , S w (i ) , wcc(i ) , S w′ (i ) , for all
segment si ∈ S
Gateway and adaptation information GW
Segment specific administrative information: I-RIEs,
I-RPs.
Multi-segment topology G=(V,E) derived from
segment internal topology and gateway bridge links
Traffic pattern: a set of requested traffic T={t},
Determining transport plane variables:
C(ki , j ) (t ) = 1 if the traffic t ∈ T is carried by wavelength
k on edge (i, j ) ∈ E ; C(ki , j ) (t ) = 0 otherwise
C( i , j ) (t ) = 1 , if the traffic t ∈ T is carried on edge
(i, j ) ∈ E ; otherwise, C(ki , j ) (t ) = 0
To optimize the following objective function:
min(
∑C
k
(i , j )
(t ) ⋅ w(i, j ))
( i , j ), k , t
subjecting to normal RWA problem constraints
(wavelength capacity constraints, wavelength continuity
constraints, wavelength converter capacity constrains)
plus the following constraints:
Traffic locality constraints (local traffic is always
accommodated within the segment): C(ki , j ) (t ) = 0 if
s S (t ) = s D (t ) = s and
(i, j ) ∉ Es
Hop
count
constrains
for
local
traffic:
s S (t ) = s D (t ) = s
∑ C(ki, j ) (t ) <| Es | if
(i , j )∈E
To reflect the goal of reducing blocking probability, the
weights on each link are assigned as follows:
w(e) = 1 for all links e ∈ E
so that the minimizing the objective function is
equivalent to minimizing length of selected paths in
terms of number of hops.
The problem outlined here is well known to be NP
complete (see [6] and references therein) and we have
developed three heuristic multi-segment wavelength
routing algorithms to solve it: end-to-end shortest path
(E2E), concatenated shortest path routing (CSR) and
hierarchical routing (HIR) [7]. E2E routing can be used
in the multi-vender network with unified control plane
where full network information is available. It selects
the end-to-end path using global shortest path algorithm.
However, E2E routing cannot work for networks with
vender specific integrated control plane where different
venders cannot exchange detailed routing information.
Instead, CSR and HIR routing can be used here to find
the end-to-end path. In CSR routing, each segment
decides the route and allocates wavelengths only based
on local information. Gateways, on the other hand, make
the decision regarding to the next segment towards the
destination based on the segment interconnection
information. HIR routing is between E2E and CSR in
the sense that all nodes maintain local information and
some inter-segment connectivity information such that
they can directly choose the right gateway towards the
next segment to the destination.
B. Multi-segment control information exchange
To apply the multi-segment network model, we use
each segment to represent each individual control plane.
And the problem of multi-control plane routing
information exchange is mapped into multi-segment
routing information exchange, which can be described
as follows:
Given multi-segment network input parameters:
Segment topologies G(i ) for each segment si ∈ S
Gateway connections GW
example, using infrequent periodical refreshing with
event-driven updates can provide quick responds to
bursty local network state changes and capture other
smoother fluctuations with low communication
overhead.
The objective is to exchange following information
among all segments:
Topologies G(i ) for all segment si ∈ S
Resource availability f (i ) , S w(i ) , wcc(i ) , S w′ (i ) , for all
segment si ∈ S
Gateway and adaptation information GW
Segment specific administrative information: I-RIEs,
I-RPs.
We also define two performance parameters to evaluate
control plane scalability, complexity and communication
overheads:
Bandwidth requirements (BR): The routing
information is disseminated in forms of Routing
Information Advertisement (RIA) packets. This
includes both intra-segment information exchange
and
inter-segment
information
exchange
requirements. Since the RIA packets are handled by
individual nodes (or brokers) and transmitted
through links, the amount of RIA packets determines
both the process power requirements and
communication overheads of the control plane.
Memory requirements (MR): All routing information
exchange schemes need to maintain databases
regarding current network states. The size of the
database determines the memory requirements of the
control plane.
We will present three schemes to solve the routing
information exchange problem: Direct Routing
Information Exchange (DRIE), Routing Information
broker (RIB) and hybrid scheme. The DRIE implies a
direct routing information exchange between vendorspecific control planes via E-NNI and RIB implies a
third-party unified control plane.
The refreshing of the routing information can be
periodical or event-driven. Periodical refreshing may be
suitable when the network information tends to be more
static, in which case the information can be relatively
infrequently refreshed to reduce communication
overhead. Another way is to trigger refreshing by events
such as changes in topology, wavelength capacity, and
wavelength utilization. For example, when wavelength
utilization reaches a threshold, the link is required to
advertise the current available wavelengths. The
periodical and event-driven approaches can be also
combined to achieve a more flexible solution in terms of
low communication overhead and accuracy. For
(a)
Networking Segment
(b)
Gateway and
Gateway Link
Routing Information
Exchange
Fig. 4. Direct routing information exchange: (a) flooding based DRIE
(b) hierarchical DRIE.
1)
Direct routing information exchange (DRIE)
In the Direct Routing Information Exchange (DRIE)
scheme, routing information is exchanged directly
among nodes, either through in-band or out-of-band
channels. DRIE can be accomplished through either
flooding or hierarchical distribution. In flooding based
DRIE (Fig. 4(a)), each node maintains a consistent view
of the whole network by advertising its local
information in RIA packets (including both connectivity
information, resource availability information regarding
each link) and forwarding any received RIA packets to
all its neighbors, except for the node that the packet
comes from. This involves excessive amount of
information exchange and does not scale well. A more
scalable approach is hierarchical information exchange
(Fig. 4(b)), where the internal RIA packets are flooded
within the local segment and the aggregated RIA packets
(gateway
information
and
segment
specific
administrative information) are distributed to other
segments.
2)
Routing information broker (RIB)
The idea of resource brokering has been proposed in
differentiated services [8], where the bandwidth broker
(BB) is an agent responsible for allocating preferred
service to users as requested, and for configuring the
network routers with the correct forwarding behavior for
the defined service. We use this idea to overcome the
problem of the DRIE scheme and consider the Routing
Information Broker (RIB), a separate entity sitting on
top of the network collecting and maintaining routing
information and accomplishing a variety of routing
functions. Two RIB architectures are possible: central
broker (Fig. 5 (a)) and segment-specific broker (Fig.
5(b)). The central RIB collects all the routing
information (RIA packets) of the whole network through
some information exchange channels, maintains the
routing information database and makes the routing
decision. On the other hand, segment specific RIB
architecture has multiple brokers and each of them
perform local wavelength routing functions for a single
segment, e.g., based on vendor-specific implementations
or administrative policies.
(a)
(b)
Networking
Segment
Gateway and
Gateway Link
RIB
Broker-Broker Routing Information
Interface
Exchange
Fig. 5. Options of optical routing information broker: (a) central RIB
(b) segment specific RIB.
3)
Hybrid routing information exchange
Most generally, each segment can have its own
solutions of routing information exchange, either direct
exchange or through brokers, e.g., segment A has a RIB
and the other two segments implement hierarchical
based direct information exchange. This flexibility is
important such that it allows network carriers a smooth
upgrade.
IV.
•
interfaces between the vendor control planes and
the carrier-specific control plane eventually
increases the integration complexity.
Third-party unified control plane– This solution is
deployed above the network elements and below
the carrier’s existing management plane (Fig. 3): it
may be less expensive to maintain under dynamic
business requirements and the integration scope is
narrower for the carrier since the integration
between the vendor-specific control planes and the
unified control plane is left to the third party.
In Fig. 3, E-NNI is used to denote an exterior networkto-network interface between different vendor-specific
control planes as defined in [1, 2]. Information expected
to be passed through E-NNI support call control,
resource discovery, connection control and selection,
and connection routing.
Carrier-independent
unified control plane
API
API
Vendor A
Control Plane
E-NNI
Vendor M
API
Vendor B
E-NNI
APPLICATIONS OF MULTI-SEGMENT MODEL
In this section, we will demonstrate the ability of
multi-segment model using three different but related
end-to-end provisioning scenarios. For each scenario,
we will first describe the problem and map the network
into the multi-segment model. Based on the multisegment representation, we will then provide heuristics
that can enable end-to-end provisioning. Related
numerical results will be shown in next section. For
simplicity, we will assume that each control segment
also refer to a transport plane segment.
A. Case 1: Wavelength routing in multi-vendor
networks
Typically, the transport infrastructure deployed in the
metro and backbone domains are supplied by different
equipment vendors. In this case, two possibilities exist
to enhance the existing management plane in order to
provide automatic end-to-end provisioning across
multiple vendors:
• Carrier-specific integrated control plane - This
solution is typically proprietary and may require
extensive management plane development, since
multiple vendor-specific control planes have to
integrate into the management plane. The
integration scope is broader than buying a vendor’s
control plane solution as the need for multiple
Transport Plane
Fig. 3. An example of Multi-Control Plane Integration.
The multi-vender scenario described above can be
modeled using the multi-segment model where each
vendor specific parts of the optical network is mapped
into a segment and connections between vendor specific
networks are mapped into gateways. The end-to-end
wavelength routing in the multi-vender scenario can be
mapped as finding path and wavelengths on the multisegment network and be solved using three multisegment routing algorithms: E2E, CSR and HIR [7].
E2E routing can be used in the multi-vender network
with unified control plane where full network
information is available. It selects the end-to-end path
using global shortest path algorithm. However, E2E
routing cannot work for networks with vender specific
integrated control plane where different venders cannot
exchange detailed routing information. Instead, CSR and
HIR routing can be used here to find the end-to-end path.
In CSR routing, each segment decides the route and
allocates wavelengths only based on local information.
Gateways, on the other hand, make the decision
regarding to the next segment towards the destination
based on the segment interconnection information.
B. Case 2: Multi-control plane routing information
exchange
The previous case solves the wavelength routing
problem in the multi-vender transport plane, this case
demonstrates applicability of the multi-segment model
to solve control plane issues of routing information
exchange.
An optical control plane needs to maintain the
routing information regarding the current network states,
including network topology, resources availability and
administrative information, to perform wavelength
routing. In multi-vender optical networks that generally
include multiple control-planes (vender specific
integrated control plane or third party unified control
plane), efficient routing information exchange within the
multi-control plane is an important issue and this
function involves both intra-domain and inter-domain
routing information exchange. To apply the multisegment network model, we use each segment to
represent each individual control plane. And the
problem of multi-control plane routing information
exchange is mapped into multi-segment routing
information exchange as described in Section III.
The DRIE implies a direct routing information
exchange between vendor-specific control planes via ENNI and RIB implies a third-party unified control plane.
∑ ∑C
( k ,l )
(i, j )
(t ) ≤ n((ik, )j ) ,
∑∑∑C
(i , j ) k
(i , j ) t
( k ,l )
(i , j )
( k ,l )
(k )
(t ) = 1 ,and λ(i , j ) (t ) ≤ TG(i , j )
l
Where C((ik, ,jl)) (t ) = 1 if there traffic t is carried by the lth
channel on the kth wavelength of link (i, j ) , C((ik, ,jl)) (t ) = 0
otherwise; λ ( i , j ) ( t ) the traffic intensity on the on edge
(i, j ) ∈ E for the traffic t ∈ T ,
n((ik, )j ) is the total number of
channels on bandwidth k of the link (i, j ) .
{g1,g2,g3}
{g1,g2,g3}
A
{g2,g3}
C
B
{g1,g2}
{g3}
D
{g1,g2,g3}
{g3}
{g2,g3}
{g2,g3}
{g2}
{g3}
{g2,g3}
{g3}
{g2,g3}
(a)
g1
A
B
g2
A
B
D
C
D
g3
C
C. Case 3: Wavelength routing in multi-granularity
networks
We refer to “multi-granularity” as to the case where
the service goes through networks with “multi-layer”
transport planes (e.g., STS-1 within a wavelength, see
Section II), which, in addition, can have different
granularities of wavelength connections (e.g. 2.5Gb/s,
10Gb/s). While multi-granularity is thus a more general
concept than what is usually referred to as “multi-layer”,
for practical reasons we will use these two terms
interchangeably. In multi-granularity network, the
granularity on each link is the minimum unit of
bandwidth it can provide (e.g., channel with granularity
OC-12 can only provide bandwidth in OC-12, even if
the requested bandwidth is OC-1).
The input of the multi-granularity wavelength routing
problem is the multi-granularity network topology and a
set of mux/de-mux nodes, the objective is to find a path,
and available wavelengths and traffic granularity
channels along the path to achieve certain optimization
objectives such as bandwidth utilization, minimum use
of mux/de-mux nodes or minimum number of hops. It
can be formulized as the same optimization problem we
showed in the Section III.A plus the following traffic
granularity constraints:
(b)
Fig. 6. (a) Network with multiple traffic granularity (b) its
corresponding multi-granularity graph.
In the rest of this subsection, we will present a 5-step
heuristic method to solve the above problem based on
the multi-segment model.
Consider a single vender network topology G=(V,E)
with associated traffic granularity function TG, and the
set of mux/de-mux nodes, the start point of multigranularity routing is to accommodate the connection
request c=(tid, sS, vS, sD, vD, b) where b is the requested
bandwidth.
Step 1: Multi-granularity graph transformation
In the network with heterogeneous traffic
granularities, traffic can only aggregate and split at
multiplexing/de-multiplexing nodes. In the most general
case, locations of mux/demux nodes can be anywhere in
the network and different traffic granularity can exist at
anywhere in the network. The network is first
transformed into multi-granularity graph as follows:
Multi-granularity graph transformation
•
For each g i ∈ TG (G ) , create a separate sub-graph (granularity
graph) GiL = (Vi L , E iL ) , which is initially empty.
•
For each vertex v ∈ V , add a new vertex in the corresponding
granularity graph to each of the granularities in the set TG (v) .
•
For each edge e ∈ E , add an edge link in the corresponding
granularity graph to each of the granularities in TG (e)
•
For each mux/de-mux node v ∈ V , add a bi-directional mux/demux link between corresponding nodes in the corresponding
granularity graphs.
Fig. 6(a) gives an example of a network supporting 3
traffic granularities: TG (G ) = {g1 , g 2 , g 3 } , and the traffic
granularity set TG (e) is marked besides each edge e ∈ E .
Mux/de-mux nodes are marked in gray in the figure. The
corresponding multi-granularity graph is shown in
Fig.6(b).
A
D
B
g1
C
G
s1
C
B
g2
s2
G
F
s3
F
(a)
(b)
Fig. 7. Example of “leased resources” form the higher granularity
traffic.
Step 2: Multi-segment network representation
In the multi-granularity graph, although the whole
network is connected, each individual granularity graph
itself is not always connected. If we directly use single
segment to model the each of them, then there will be
the case that the local traffic needs to be accommodated
by resources outside the segment (“leased resources”).
This can be illustrated as Fig.7(a), where connection
request from node A to D need to be routed though
granularity g2 although the source and destination (A&D)
belong to the same granularity g1 graph. To solve this
problem, we segment each granularity graph further into
a number of self-connected sub-graphs. Each of these
sub-graphs is represented by a separate segment. Fig.
7(b) shows an example of the 3-segment network
corresponding to the 2-granularity network in Fig.7(a).
The detailed transformation is showed as follows:
Multi-segment graph generation
•
•
For each granularity graph G L = (V L , E L ) , calculate its
i
i
i
connected components ( Vi1L , Vi 2L , …).
For each VijL , induce a sub-graph
•
Create one segment sijL for each sub-graph GijL = (VijL , EijL )
•
Create one gateway between corresponding segments for each
mux/de-mux link in the multi-granularity graph.
The traffic granularity function is: TG (GijL ) = {gi } , for any
•
We have the following heuristic weight assignment
schemes:
Finest granularity first (FINE)
For
segment
internal
link,
,
e ∈ EijL
w(e) = w(GijL ) = w( g i ) = α ⋅ g i . For gateway bridge link
eGW , connecting segments with granularity gi and gj,,
w(eGW ) = β ⋅ ( gi + gk ) , α , β > 0 and α >> β
segment and is homogenous for all edges within the segment.
Step 3: Weight assignment
In the multi-segment network generated above,
weights within in each segment are uniform distributed
and depends on the traffic granularity it carries, i.e.,
Minimize number of mux/de-mux nodes (MinMux)
,
For
segment
internal
link,
e ∈ EijL
w(e) = w(GijL ) = w( gi ) = α . For all gateway bridge link
eGW , w(eGW ) = β , α , β > 0 and α << β
D
A
E
E
w(e) = w(GijL ) = w( g i ) for each e ∈ EijL
Minimize hop counts (MinHop)
For
segment
internal
link,
e ∈ EijL
,
w(e) = w(G ) = w( gi ) = α . For gateway link eGW ,
L
ij
w(eGW ) = 0
Step 4: Path selection
After the weight assignment, different multi-segment
routing algorithms [7] can be applied to select the path.
Step 5: Resource allocation
After
path
selection,
channel/wavelength
assignments are performed along the end-to-end path
based on both constrains. If there is no enough resource
available (e.g. no channel has enough free capacity), the
call is blocked.
The above 5-step scheme can also applied for multicarrier or multi-vendor multi-granularity network, where
the network is composed of sub-networks from different
administrative domains and each domain has multiple
granularities (layers). In this scenario, we first apply the
step 1-3 to each administrative domain with multiple
granularities and use segments to represent connected
sub-graphs in each layer of each carrier/vendor network.
Both the multiplex/de-multiplex links and NNIs are
viewed as gateways. Multi-segment routing algorithms
[7] is then performed to solve the end-to-end
provisioning problem. Fig. 8 shows an example of multivendor multi-granularity network. We can use a 5segment network to model it, if each granularity graph is
connected.
Among recent works addressing the multilayer/multi-granularity issue, Ho et.al., solve the RWA
problem with multi-granularity traffic[9]. Zhu et.al.,
perform traffic engineering in multi-granularity optical
networks using dynamic traffic grooming [10]. But all of
them are focusing on transport plane issues and assume
single administrative domain where full information of
all layers/granularities is available. The solution
presented here is more general and capable of
performing multi-granularity routing under various
control plane scenarios.
Backbone
OC-192
N5
N4
Metro1
OC-48
N2
OC-12
N1
NNI
typical carrier’s national network. The wavelength
capacity is 16 per backbone link and 8 per metro link.
N8
N6
NNI
Metro2
N7
OC-48 N9
N3
OC-12
N 10
N 11
Fig. 8. Multi-vendor multi-granularity network.
V.
PERFORMANCE
RESULTS
STUDY
AND
NUMERICAL
In this section, we will show the numerical results
related to the applications of the proposed multisegment model for end-to-end provisioning as described
previously and particularly focus on metro-backbone
interconnection scenarios where the backbone and metro
networks have their own vender specific properties.
In all the experiments, the connection requests arrive
according to a Poisson process with call holding time
being exponentially distributed. Although the multisegment model is capable of handling various transport
plane scenarios (full wavelength conversion, partial
wavelength conversion, wavelength merging) [7,11], our
focus here is how to perform end-to-end provisioning in
across multi-vender network. Therefore, we only show
the scenario that all nodes are capable of full wavelength
conversion (i.e., OEO in all nodes) for illustration. To
focus on the end-to-end provisioning, we also assume all
traffic are global. The backbone does not generate any
traffic and only carries global traffic generated from
metro networks. Metro traffic distribution is uniform,
i.e., all global calls are equally likely to arrive at any
node, and are equally likely to be destined to any nodes
in any other metro network. Each result is obtained with
95% of confidence level.
Fig. 10 Blocking probability for E2E, HIR and CSR under different
traffic loads and gateway interconnections.
Fig. 10 shows results for three gateway
interconnection configurations, which can be single
(1GW), double (2GW), or triple (3GW). For double and
triple gateway configurations, multiple gateways are
equally located on the metro ring. For E2E routing, the
detailed routing information has to be exchanged among
the backbone and metro networks through DRIE which
implies a direct routing information exchange between
vendor-specific control planes via E-NNI. For CSR and
HIR, each segment maintains local information and
aggregated global information though routing
information brokers (RIB) which implies a third-party
unified control plane. The results shows that E2E
routing has the best blocking performance. The blocking
performance can be further improved by adding more
gateways connection neighboring segments. This is
because traffic loads can be balanced on different paths
through different gateways.
7
10
Flooding DRIE
HIR
DRIE
Central RIB
Segment RIB
Hybrid 1DRIE
Hybrid 2DRIE
Hybrid 4DRIE
6
Fig.9. 14-node NSFNET backbone, each backbone node is attached
to a 6-node bi-directional metro rings (only shown 2 here).
The first experiment shows the blocking performance
of different wavelength routing algorithms for multivendor metro-backbone scenario. The backbone network
topology used in the experiment is a 14-node NSFNET
topology (shown in Fig.9). To each backbone node, a 6node bi-directional metro ring is connected through
single double, or triple gateways. This represents a
Total Number of Packets
10
5
10
4
10
3
10
2
10
10
15
20
25
30
Metro size
35
40
45
Fig. 11 Total number of packets vs. metro segment size
50
5
10
4
Total Number of Packets
10
Flooding DRIE
HIR
DRIE
Central RIB
Segment RIB
3
10
2
10
0
20
40
60
80
100
120
Segment Size
140
160
180
200
Fig. 12 Effects of segmentation on routing information exchange.
The second experiment is related to the multi-control
plane routing information exchange. We assume all
segment internal RIA packets contains the information
of all wavelengths on a link while aggregated RIA
packets contains segment connectivity information.
Using the same network work topology as Fig.9 and
fixing the backbone network as well as gateway
locations, we increase the metro segment size. Fig. 11
illustrates the scalability of different schemes by
showing the relationship between the total number of
RIA packets and the network size. As we can see from
Fig. 11, the number of packets goes up with the
increasing metro size in all four schemes. DRIE schemes
disseminate routing information through flooding so that
they generate much more packets than RIB schemes.
Hierarchical DRIE has is more scalable than the
flooding based DRIE since the flooding is limited within
the segment instead of the whole network. The segment
specific RIB requires more packets than the central RIB
for inter-segment exchange. Fig. 11 also shows results
for hybrid information exchange where the backbone is
assumed to use RIB scheme and metro networks use
different schemes (e.g. Hybrid 2 DRIE means 2 metro
segments perform DRIE and others use routing
information broker). The total number of packets for
hybrid exchange is between that of DRIE and RIB
schemes.
Fig. 12 illustrates the effects of network
segmentation to the overheads of routing information
exchange. The simulation is performed on a 200-node
bi-directional ring. All nodes are segmented into a
number of equal-sized segments from 2 nodes/segment
(100 segments) to 200 nodes/segment (1 segment). Since
both flooding based DRIE and central RIB treat the
multiple segments as a whole network, clustering does
not have any effect on them. In the segment specific RIB
scheme, each broker maintains local information, so the
total intra-segment bandwidth for all segments is fixed,
but the number of segments is decreasing with the
increasing segment size. Therefore, the total number of
packets is decreasing due to reduced inter-segment
exchange. For hierarchical DRIE, where the flooding is
used for intra-segment exchange, increasing the segment
size will increase the intra-segment exchange overhead.
However, it also reduces the total number of segments
which decreases the inter-segment exchange. Therefore,
there is an optimal segment size where the best tradeoff
between intra-segment flooding and inter-segment
exchange can be achieved and the total number of
packets is minimized (15 nodes per segment in this
example).
The results in both Fig. 11 and Fig. 12 indicate that
for the DRIE has larger overhead than the RIB. As we
discussed in the previous experiment, E2E has the
lowest blocking probability but assumes DRIE which
has higher control overheads. CSR and HIR have higher
blocking probability but they can perform routing
information exchange through RIB which has lower
control overheads. This indicates the tradeoff between
transport plane performance and the control plane
overheads.
The third experiment is on the multi-vender multigranularity network. We use the same network topology
as the first experiment and the multi-granularity
configuration as illustrated in Fig. 8. Specifically, the
backbone network operates with single granularity (16
OC-192 channels). All metro links operate with two
granularities (4 OC-48 channels and 16 OC-12 channels)
and connected to the backbone at OC-48 granularity.
The call arrives with bandwidth requirement uniformly
distributed from OC-1 to OC-12 (discretely). Figure 13
illustrates the performance of E2E routing with various
weight assignment schemes based on different mux/demux configurations. In configuration 1, all metro nodes
are equipped with mux/de-mux capabilities (100%) and
in configuration 2, only every other nodes on the metro
ring are mux/de-mux enabled (50%). The parameters for
various weight assignment schemes are as follows:
α = 1, β = 0.1 in FINE scheme, α = 1, β = 500 in MinMux
scheme and α = 1 in MinHop scheme. The results shows
that the blocking probability increases with the
increasing load in all schemes. It also demonstrated that
the blocking performance are different when we have
different optimization objectives, for example, the FINE
scheme has the lowest blocking probability since there
are more OC-12 channels than OC-48 channels in metro
networks and it choose the finest possible channel (OC12). MinHop scheme choose the shortest path in number
of hops, it also reduces the blocking probability since
less links will be used for a connection. In contrast, the
objective of MinMux scheme is to reduce the number of
Mux nodes per connection instead of reducing blocking
so it has higher blocking probability. Another interesting
observation is that for both MinMux and MinHop
schemes, 50% mux/de-mux configuration has even
better performance than that of the 100% configuration.
This is because some connections are forced to take OC12 channels due to lacking of mux/de-mux nodes.
Fig. 13 Performance of multi-layer end-to-end provisioning.
TABLE II.
METRO NETWORK BANDWIDTH UTILIZATION
Traffic load
FINE
MinMux
MinHop
Low
0.52/0.32
0.15/0.16
0.16/0.17
Medium
0.54/0.37
0.18/0.18
0.16/0.21
High
0.55/0.38
0.18/0.20
0.19/0.18
For the same multi-vender multi-granularity network,
we also compared the metro bandwidth utilization of
each scheme under low, median and high traffic loads
(corresponding loads per node are 1, 5, 10). The
bandwidth utilization for link e ∈ E is defined as follows:
U ( e) =
∑ ∑B
k ∈S w ( e ) l
∑ ∑C
( k ,l )
utl ( e )
( k ,l )
( e)
k ∈S w ( e ) l
( k ,l )
⋅ Ball ( e)
where C((ek),l ) = 1 if there is traffic carried by the lth
channel on the kth wavelength of link e, C((ek),l ) = 0
otherwise. Bcap ( k ,l ) and Butl (( ek),l ) are the capacity and utilized
(e)
bandwidth of the corresponding channel respectively.
Each entry n1/n2 in the table is the bandwidth utilization
for 100% mux configuration (n1) and 50% mux
configuration (n2) and each number is calculated as the
average bandwidth utilization among all metro-links at
the end of the simulation (after 6 million calls).
Table II shows that FINE scheme has the much
higher bandwidth utilization than the other two schemes.
This is because the FINE scheme always select the
finest possible granularities so less bandwidth are
wasted per channel. The MinHop scheme and MinMux
schemes on the other hand are aimed to improve other
performances and do not differentiate among different
granularities. Therefore, they cannot achieve the same
bandwidth utilization as the FINE scheme. The FINE
scheme implies a multi-granularity control plane view of
the transport network, where the control plane is capable
of controling both wavelength and sub-wavelength (OCn) transport plane layers. The MinMux and MinHop
schemes imply the single-granularity view of control
plane where all granularities are treated equally. As
described in Section III, multi-granularity can be
modeled as multi-segment network, multi-granularity
control plane introduce higher control plane complexity
since it has more segments. This again reflects the
tradeoffs between transport plan performance and
control plan overheads.
VI.
CONCLUSIONS
In this paper, we presented a novel network model as
a tool to solve a generalized category of problems
related to end-to-end provisioning over interconnected
optical networks. This model is referred to as multisegment network model, where the notion of networking
segments refers to any portion of an optical network that
requires particular consideration for end-to-end
provisioning, e.g., sub-networks characterized by
different levels of traffic aggregation, different
administrative areas, or logical segments of the optical
control plane. We particularly considered the control
plane issues related to the provisioning and showed that,
for every segments of the transport network, there is a
corresponding segment of the control (logical view),
which has a large impact on the network performance.
We described three different application scenarios for
end-to-end provisioning. In the multi-vendor scenario,
we analysed how the choice of routing scope can impact
the performance for path provisioning. In the control
plane routing information exchange scenario, we have
showed that the choice routing information exchange
architecture, e.g., broker vs. direct exchange, has also an
effect of the system design. Finally, in the multigranularity/multi-administrative scenario we illustrated
the applicability of our model to efficiently cope with
multiple control planes in multi-carrier multi-granularity
networks. The performance results demonstrated that the
strategies based on multi-segment network model
presented here can be used to architect control planes
and extend optical service provisioning, as well as
network’s coverage. Our future work will focus more on
multi-granularity multi-administrative scenario where
segments of the control plane are created to deliver
improved network performance, in particular in terms of
network recovery.
REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
ITU-T Rec. G.8080/Y.1304, Architecture for the Automatic Switched
Optical Network (ASON)
IETF draft- Generalized Multi-Protocol Label Switching Architecture,
draft-ietf-ccamp-gmpls-architecture-07.txt
A. Somani, M. Azizoglu: “All-optical LAN interconnection with a
Wavelength Selective Router”, IEEE INFOCOM’97, pp. 1278-1285.
M. Kovacevic, A. Acampora: "On the benefits on wavelength
translation in all-optical clear-channel networks“, Proc. of
INFOCOM’95, Vol. 2, Boston, MA, April 1995, pp. 413-422.
S. Subramaniam, M. Azizoglu, A. Somani: “All-Optical Networks
with Sparse Wavelength Conversion”, IEEE/ACM Trans. Networking,
Vol.4, No.4, 1996, pp.544-557.
A. Jukan, G. Franzl: "Path selection methods with multiple constraints
in service-guaranteed WDM networks”, accepted for publication in
ACM/IEEE Transactions on Networking, 2003.
Y. Zhu, A. Jukan and M. Ammar, “Multi-segment Wavelength
Routing in Large-scale Optical Networks,” ICC2003.
K. Nichols, V. Jacobson and L. Zhang, “A Two-bit Differentiated
Services Architecture for the Internet”, RFC2638, July 1999.
P. Ho and H. T. Mouftah, “Routing and Wavelength Assignment
With Multigranularity Traffic in Optical Networks,” Journal of
Lightwave Technology, pp.1292-1303, vol.20, no.8, 2002.
K. Zhu, H. Zhu and B. Mukherjee , “Traffic Engineering in
Multigranularity Heterogeneous Optical WDM Mesh Networks
through Dynamic Traffic Grooming,”, IEEE Network, pp.8-15,
March/April 2003.
Y. Zhu, A. Jukan and M. Ammar, "Performance analysis of multisegment wavelength routing", IEEE/LEOS Summer Topical Meetings,
2002, Quebec, Canada.
B. Rajagopalan, J. Luciani and D. Awduche, “IP over Optical
Networks: A Framework”, draft-ietf-ipo-framework-04.txt, IETF
Internet draft.