Comparison Between PIV & ESPI and Stereo PIV
advertisement

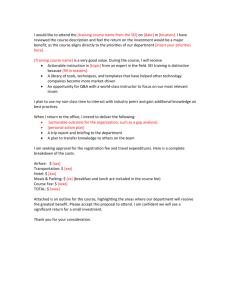
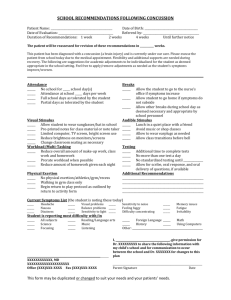
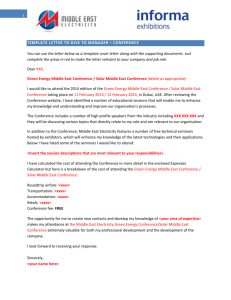
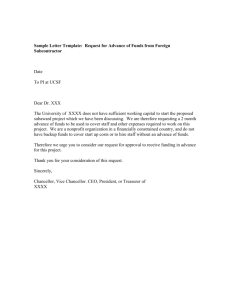
Comparison Between PIV & ESPI and Stereo PIV on the Measurement of 3-C Velocity Fields J. Lobera1, M. P. Arroyo1, N. Perenne2, M. Stanislas2 1 Dpto. Física Aplicada. Facultad de Ciencias. Universidad de Zaragoza. C/ Pedro Cerbuna, 12, 50009- Zaragoza. SPAIN. 2 LML URA 1441, Bv. Paul Langevin, Cité Scientifique. 59655-Villeneuve d'Ascq. FRANCE Abstract In this paper, PIV and DSPI as an alternative to stereo PIV on the measurements of 3-C velocity fields is analysed. DSPI as a velocimetry technique is described, including a discussion on the necessary requirements for going from a PIV setup into a DSPI setup and the different suitable geometries for combining PIV and DSPI. Some results from a turbulent boundary layer flow in a wind tunnel are presented including a quantitative comparison with the 3-C velocity data simultaneously measured with stereo PIV. 1 Introduction Stereo PIV [1] is a quite well established technique for 3C-2D velocity field measurements. Stereo PIV requires a wider optical access than 2C PIV and suffers from an intrinsic lower accuracy in the out-of-plane velocity component measurements when the optical access gets narrower. Electronic Speckle Pattern Interferometry (ESPI), also known as Digital Speckle Pattern Interferometry (DSPI), is another 2D velocimetry technique [2]. DSPI shares with 2C PIV the geometry for illumination and observation but is intrinsically sensitive to the out-of-plane component. Thus, the combination of DSPI with PIV should allow measuring the 3C2D velocity fields from a common observing window and with a good accuracy for each of the three components. DSPI has already been setup in a slow convective flow with a He-Ne laser [3] and in a wind tunnel flow with a pulsed Nd-YAG laser and fiber optics [4]. Good quality interferograms, giving qualitative information on the spatial pattern of the out-of-plane velocity component, using a 90o recording geometry have already been reported. This paper will show the ability of DSPI for producing quantitative data, based on some experiments carried out at Laboratoire de Mécanique de Lille (LML) where measurements were simultaneously taken with PIV and DSPI and with stereo PIV in a wind tunnel turbulent boundary layer. In the following, PIV and DSPI as an alternative to stereo PIV will be analyzed. We will start by de- 352 Session 6 scribing DSPI as a velocimetry technique. We will also discuss alternative ways for combining PIV and DSPI as a 3-C velocimetry technique. Finally, we will report on the set up of PIV and DSPI in a wind tunnel and on the accuracy of the measurements, taking stereo PIV as the reference technique. 2 DSPI as a Velocimetry Technique DSPI is a widely used technique for measuring solid deformation/displacements with interferometric sensitivity. Speckle photography is another technique for analysing solid deformation/displacements with lower (“photographic”) sensitivity. Both techniques rely on the speckle pattern that seems to cover the solid when illuminated by a coherent light. The solid deformation is inferred from the intensity changes in the speckle field. In speckle photography (SP), two photographs of the speckle field are taken. The changes of intensity appear as speckle displacements bigger than the mean speckle size. Deformations are locally measured from the position of the cross correlation peak and the measured deformation/displacement is always the projection on a plane perpendicular to the mean observation direction. In DSPI, the image of the speckle field is coherently overlapped with a reference beam in the recording plane. The speckle displacement has to be smaller than the mean speckle size. Deformations are obtained globally from a calculation of the speckle intensity difference or alternative techniques. In fact, the DSPI analysis detects changes in the object phase, being the deformation related to the object phase. And the measured deformation is the projection along the sensitivity vector direction, direction that depends both on the observation direction and on the illumination direction. In fluid velocimetry, SP evolved into the well known PIV [5]. A fluid plane plays the role of the solid surface. The speckle field is now an image particle field. The fluid is seeded with these particles that act as tracers. The illumination direction is always an in-plane direction in fluid velocimetry since the fluid plane is determined by the illumination light sheet. In a similar way, DSPI can evolve into a fluid velocimetry technique. Thus, going from PIV to DSPI requires (Fig. 1): a) to modify the camera so that the reference beam can be added to the particle image field; b) to reduce the time interval so that particle displacements smaller than the particle size are obtained; c) to use an illumination source with an appropriate coherence length; d) to use a different analysis process. The reference beam can be speckled [3] or smooth [4]. In any case, the field recorded on the CCD sensor is a specklegram: a “speckle” field sensitive to the object wave phase, φ [3]. The magnitude to be measured is the phase difference ∆φ that occurs during the time interval ∆t that separates two recorded fields. This ∆φ r r depends on the velocity V and on the illumination and observation directions, u i r and u o (Fig.1) such that Holography and ESPI 353 r r r 2π r (u o − uri )• V ∆t = K • V ∆t = K V K ∆t (1) λ r r where VK is the projection of V over the sensitivity vector K . In the basic DSPI setup, the comparison of two specklegrams by an intensity difference or a speckle correlation calculation [3] produces an interferogram that qualitatively shows the ∆φ field. However, the interferogram is also affected by the speckle which makes accurate quantitative measurements hard to obtain, and there is a sign ambiguity on the ∆φ. In the spatial phase shifting (SPS) setup, a divergent reference beam is accurately placed with respect to the object beam. A Fourier transform method [6] or a several pixel intensity calculation [7] gives a wrapped phase difference map (WP) with no sign ambiguity. Although this map is also affected by speckle noise, the noise is easier to remove and accurate quantitative measurements can be made. SPS-DSPI has been used in all the results shown in this paper. Figs. 5 and 6 show some WP. A RPT technique [8] has been used to remove the noise and, at the same time, to unwrap the phase map. Figs. 5 and 6 also show the resulting unwrapped phase difference maps (UP), which are shown wrapped for better visualization. In this paper, the reference beam is brought near the CCD camera with no fiber optic. Fig. 5 shows the reference fringe system that can be introduced by an onpurpose misalignment of the reference beams coming from the first laser pulse and the second laser pulse. It is well known in interferometry that a finite reference fringe system helps to detect very small phase changes. ∆φ = Reference beam DSPI camera BS Light sheet ui Reference beam uo X Y K Z Object beam Light sheet ui Camera lens BS PIV camera θ uo Z X K Y Fig. 1. Basic DSPI setup (normal recording). Fig. 2. Basic PIV and DSPI setup (forward recording). r r Since u i is fixed in fluid velocimetry, the sensitivity vector depends on u o. r r r r When the angle θ between u i and u o is 90º (normal recording) both VX ( u i = i ) r r and VZ ( u o = k ) will contribute in a similar way to ∆φ. If VZ <<< VX, VZ will be hard to measure. The optimum time interval ∆t depends both on the velocity field 354 Session 6 r and on the recording geometry through K . ∆t should be such that a maximum of 10-20 fringes are obtained in the phase map. When VZ>>VX, VZ will be well measured with DSPI but the optimum ∆t will be too small. DSPI can also work for non normal recording. In this case, it is preferable to have θ < 90º so that K is smaller and its direction is closer to VZ. This means that DSPI sensitivity to VZ decreases with the angle, which increases the optimum ∆t allowing to measure higher velocities. 3 PIV and DSPI as a 3-C Velocimetry Technique Regarding combining PIV and DSPI for a 3-C velocimetry technique, this can be done using one common recording geometry. For θ=90º, PIV will measure VX, VY and DSPI will measure VK. VZ is obtained after taking out the contribution of VX and VY. Two cameras, one for PIV and one for DSPI, are needed. They can be on the same side of the fluid plane (Fig. 2) or on opposite sides (Fig. 3). As an example, in a typical windtunnel flow with VZmax ~ VYmax ~ 0.1 VXmax and ∆VX ~ ∆VY ~ ∆VZ, ∆t ~ ∆T/10, being ∆T the optimum time interval for PIV with a M=0.1 magnification and a normal recording. For velocities in the range of cm/s to m/s, a laser with at least three independent cavities is necessary so that three pulses at to, to+∆t and to+∆T are fired per laser cycle. Only for velocities in the range of mm/s a two cavity laser can be used; in this case, only one camera could be used. For any θ, the angle between the direction of projection for DSPI and the plane of projection in PIV is θ/2. For θ=45º, the accuracy in VX, will be lower than in VY or VZ. For θ>90º, DSPI will measure VX and PIV will measure VZ but smaller ∆t will be necessary due to the bigger K. Thus, normal recording should be the preferred geometry, when the optical access is limited and both techniques have to share the same common view. Otherwise, DSPI should be set for θ<90º and PIV should be set for normal viewing. 4 Experiments in a Turbulent Boundary Layer The experiments presented here have been carried out in the LML wind tunnel. This wind tunnel has a cross section of 1 m x 2 m; the freestream velocity was set to 3 m/s. The Reynolds number, based on momentum thickness, is 5500. A plane perpendicular to the wall and parallel to the main velocity was illuminated. A 40x75 mm2 section near the windtunnel top wall was recorded. The whole flow was seeded with oil particles. Holography and ESPI 355 4.1 Optical set-up The beam coming from a four independent cavity Nd-YAG pulsed laser is shaped into a light sheet that illuminates an XY plane (Fig. 3). Four PCO Sensicam PIV cameras were set to observe the upper part of the light plane. Camera 1 and 2, looking at an angle of 45º with the light sheet, were used for the stereo PIV recordings. Camera 3 and 4, looking at an angle of 25º, were used for the PIV and DSPI recordings. Camera 4 was adapted for DSPI by placing a small rail where a mirror, a divergent lens and a beamsplitter cube were set for the reference beam arm. The reference beam energy was adjusted by means of a three linear polarizer system, PL. The synchronization of lasers and cameras (Fig. 4) was done using Lavision hardware and software. The third and fourth pulses, fired at a time interval of ∆t, were recorded in two separate frames of camera 4; at the same time, they were also recorded together on the second frame of cameras 1, 2 and 3. The first frame of these three cameras recorded the first and second pulses, which were simultaneously fired. The time interval between the first and the third pulses was set to ∆T = 100 µs. Mirror 4 3 X BS L 1 L L L Z Polarizer 2 Laser 1 Laser 2 Y Reference beam Laser 3 Laser 4 1 2 1 1 2 Cameras 1,2,3 2 1 2 Camera 4 Fig. 3. Setup for stereo PIV and PIV and Fig. 4. Signals for synchronizing the lasers and the cameras. DSPI in a windtunnel flow. 4.2 DSPI results For calibrating the setup, recordings were taken with the air in the wind tunnel seeded but still (U=0) and the minimum ∆t possible (∆t =0.5 µs). Fig. 5a shows 356 Session 6 the finite reference fringe system, where the slowly varying spacing is due to the angular geometry. Figs. 5b and 5c present some DSPI results for very small displacements, shown by a small perturbation on the reference fringe system without noticeable change in the spacing. Fig. 6 shows some representative results obtained for several ∆t. In all cases, PIV recordings were simultaneously taken. For each experiment, the wrapped (upper row) and the unwrapped (middle row) phase difference maps as obtained from the DSPI recordings are presented. The third map (lower row) shows (in a wrapped way) the phase due solely to the flow velocity. It is obtained by subtracting the reference fringe phase from the measured phase. The phases in this map are directly related to VK (Eq. 1) and it is important to know the absolute phase. Global corrections on the measured phase can be made taking into account the information provided by the PIV data recorded with camera 3. b) a) c) Fig. 5. Wrapped and unwrapped phase difference maps obtained from SPS-DSPI recordings for: a) U=0m/s and ∆T=0.5 µs; b) U=1.5 m/s and ∆T=1.0 µs; b) U=3m/s and ∆T=0.5 µs. a) b) c) d) e) Fig. 6. SPS-DSPI results for U=3m/s. a) expe1, ∆t=2 µs; b) expe2, ∆t=2 µs; c) expe3, ∆t=3 µs; d) expe4, ∆t=5 µs; e) expe5, ∆t=10 µs. Holography and ESPI 357 4.3 Stereo PIV analysis In the present experiments a 3-d calibration based reconstruction following Soloff et al. [9] was used to map the 2-C displacements measured from each camera to the real object space and for combining them to obtain the three-dimensional data. For each camera, five calibration images were used to obtain the relationship between the three-dimensional object field position (in mm) and its corresponding two dimensional image field position (in pixels). A direct mapping of the particle images recorded by the four cameras into particles in object space [10] was also used to check the overlapping between the calibration target and the light sheet. The stereo PIV analysis is done in the following way. First of all, a Cartesian grid in the object space is defined. In the second step, the position in the image space for camera 1 and camera 2 is calculated using the mapping function from the 3-D calibration (for z=0). The third step consists in interrogating the particle image fields according to the mapped grid in each camera so that two 2-C displacement fields are obtained (Fig. 7a and 7b). Finally, the 3-C displacement is determined using again the mapping function. In this way, the 3-C vector field in a Cartesian grid (Fig. 7c) is determined without any need for interpolation. dy (pixels) 1 pixel x (mm) -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2 0.3 0.4 0.5 -20 -10 0 10 20 -10 Vz (m/s) 0.30 0.25 0.20 0.15 0.10 0.05 0.00 -0.05 -0.10 -0.15 -0.20 0 y (mm) 10 20 30 40 1 m/s 50 60 a) b) c) Fig. 7. Stereo PIV results from expe5. 2-C displacement fields as measured from: camera 1 a) and camera 2 b) after subtracting dX = 6 pixels. c) 3-C velocity measurements. A mean velocity of 2.5m/s has been subtracted from VX. 4.4 PIV and DSPI analysis The PIV and DSPI analysis starts, as in PIV, by defining the grid in object space and mapping it into image space for cameras 3 and 4. Then, one 2-C displacement field (Fig. 8a) is determined from a PIV analysis of the particle image fields recorded with camera 3. Finally, the unwrapped phase map (Fig. 8b) is obtained and the absolute phase values in camera 4 grid are kept as DSPI data. Three equations 358 Session 6 are obtained using the mapping function of Soloff et al. [9] for the PIV data and Eq. 1 for the DSPI data. Equation 1 needs the knowledge of the recording geometry. The mapping function for camera 4 is used to determine this geometry. The 3-C velocities (Fig.8c) are determined by solving one set of three equations for each point of the grid. x (mm) 0.8 -10 0. 0 0.6 0 0.6 0.2 0.2 1.0 0. 4 0 .0 0.0 10 y (mm) 0.2 -0.2 0.4 0.8 0.0 8 0. 0.6 20 Vz (m/s) 0.30 0.25 0.20 0.15 0.10 0.05 0.00 -0.05 -0.10 -0.15 -0.20 .2 -0 0.40.2 0.6 0.6 0.6 10 .8 .4 0 -0 1.2 -0 00..4 6 1.0 -10 -1.0 -20 20 30 -0.2 40 1 pixel 1 m/s 50 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2 0.3 0.4 0.5 dy (pixels) a) -1.0 -0.8 -0.6 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 d Κ ( µ m) b) 60 c) Fig. 8. PIV and DSPI results form expe5: a) 2-C displacement field measured from camera 3 after subtracting dX = 6 pixels; b) 1-C displacement field measured from camera 4 with DSPI analysis; c) 3-C velocity measurements. A mean velocity of 2.5m/s has been subtracted from VX. 5 PIV and DSPI vs Stereo PIV Results Figs. 7 to 10 show the results obtained from one experiment where ∆t= ∆T/10. There is good qualitative agreement between the measurements obtained with stereo PIV and with PIV and DSPI. A more quantitative comparison is presented in Fig. 9. The noisier isocontour maps correspond to VY measured from PIV and DSPI. It is due to the recording geometry because both camera 3 and camera 4 are less sensitive to VY than to VZ. The angle between the projections measured with the two cameras is 37º, while the angle between the projections measured with stereo PIV is 90º. The root mean square difference between the PIVandDPSI data and the stereo PIV data is 4.7 cm/s, 7.1 cm/s and 4.8 cm/s for the VX, VY and VZ component, which correspond to a 1.5 %, 2.2 % and 1.5 % with respect to the maximum velocity (3.2 m/s). Fig. 10 shows the results obtained when using camera 1 or camera 2 instead of camera 3 for PIV in the PIV and DSPI technique. The dispersion in VX is clearly decreased because VX is obtained from the PIV camera and the same camera is used in this case for stereo PIV and PIV and DSPI. Regarding VY and VZ, the best data are obtained when using camera 1 due to its bigger angle between projections (57º). For camera 2, the angle is only 33º and the measurements are not as good. Holography and ESPI 359 The best data show an rms difference of 1.5 % which is comparable with the accuracy of stereo PIV. Figs. 11 and 12 show the results obtained for other experiments where ∆t range from ∆T/50 to ∆T/20 and using camera 1 as the PIV camera for PIV and DSPI. The quantitative comparison gives very similar values for the mean square difference in the measured velocities. Some points with bigger discrepancies are seen in expe4. They correspond to the area next to the wall where stereo PIV have measured bigger positive VZ values than in any other experiment. 2.5 2.25 2 2 2.25 2.5 2.75 SPIV 0.5 Vy (m/s) 0 -0.25 -0.5 -0.25 0 0.25 SPIV Vz (m/s) x xxxxxx xxxxxxxx xx xx x xxxx x xx xx xx xx x xx xx xxxxx x xx xx x x xx x xxx x x x x x xxx x xx xx x x x x xxx x xx xx x xx xx x x x xx x xxxx xx xxx x x x xxxxxxx x xx xx xxx x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x xxx xxx xxxxxxxxx xxx xxx xxxx x xxxx x xxxxx xxxx xxx 0.25 0 -0.25 x x -0.5 3 0.5 xx xx x xxx x x x xx xxxxxx x x xxxx xx xxxx xx x x xx x xx x xx xx xxxx xxxxxxx x x x x x x x x x x x x x x x xxxxxxxx x x x xx x xx x xx x x xx x x xx xx x xx xx xxxx xxx x xx xx xx xx x x x x xxx xxx x x xx xx xx xxxxx xx x xx xx xx xxx x xx xx x xx xx x xx x x x xx x x xxx x xxxx x xx xxx x xxxx xxxx x x xxx xxx x x xx x xx x xx xxxxxxxxx xxx xxx x x x xx x xx xxx x xx xxxx x xx 0.25 PIV&ESPI 2.75 xxxxxx xxx x xxxx xx x x xxxxxx xx xxxxx xxxx xxxx xxx xxxxxxx xx x x x x x xxxx x xxx xxx xx xxx xxxx xx x x x xxx xxx xx xx x xxx xxx xx xx xxx xx xxx xx xx xx xxxxxx xx x x xxx x x x x x x x x x x xx x x x x xx xxx xxxx xxxx xx x xx x xx xxx x xx x xxxx xxx xx xx x x xxx xxx xx xxxxxx xxxxx x xx xxxxxxx x x x xxxx x x x x x xxxx xx xxx xxxxxxx x x xx x xx x xx xxx xx xx xx xx x x x xx xxxx xxxx x xxx xx xx xxxxxx x xxxxxx x x x x x x xxx Vx (m/s) PIV&ESPI PIV&ESPI 3 -0.5 0.5 -0.5 -0.25 0 0.25 SPIV 0.5 Fig. 9. Quantitative comparison of the velocity data shown in Fig. 8. 2 2 PIV&ESPI 3 2.75 2.5 2.25 2 2.25 2.5 2.75 SPIV 2.25 2.5 2.75 SPIV 3 PIV&ESPI 0 -0.25 Vz (m/s) xxxxxxx xxx xxx xxx x x x x x xxx xx x x xxxxxx x xxxx xx x x xx x xx x x x xx x xx xx x xx xx xxxx x xx x xx x xx xx x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x xxxxxxxx x xx xxx x xx xx x xx xx xxxx xx xx xx xxx xx xxxxx xx xx xx xxxx 0.25 0 -0.25 -0.5 -0.5 -0.5 -0.25 0 0.25 SPIV 0.5 -0.5 -0.25 0 0.25 SPIV 0.5 x Vx (m/s) 2 0.5 xx xx xxx xxx x x x x x x x x x x xxxxx x x xxxx xxx xxxx xx xx xxx xx x x x xx x xxx x xxx xxx xx x x xx x xx x xx x x xxx xxx xx xx xx x xx xx x xx xxx xx x xx x xx xx x xxx x xxxx xx xx xxxx x x x x x xx x x xxx x x x x xxx x xx x xxxxx xxx x x x x x x x x x x x x x x x x x xxxx xxx x xxxxxxx x x x x x 0.25 3 x xxxxx xxx xxxxxx xxxxxxx xxxxx x x x x x x xxxxx xx x xxx x xxxx xxxxx xxx xx xx xx xx xx xx x x xxx x x x x x x x xx xxx xxx xxx xx xxx x xxxxx xxxxx xxx xxxx xx xxxx x x x x x xx xxxxx x x xx x xxx xx x xx xxxx x x x xxxx xxx xxxx xxxx Vy (m/s) 0.5 xx x x x x x xxx x x x x x x xxxx x xxxx xxx x xxxx xxx xxxx xx xx xx xx xxx xx xx xx x xx xxxx x xxxxxx x xx x xxx xxx xxx xx xxxxx x xxxx xx xx xx x xx xxx xxx x xx xx xx xxx xxxxxxx x x xxx xx x x x x xx x x x x x x x x x x x x xx x x x x x x x x x xx x x x xxx xxxxxxx xx xx xx x xx xx xx x x x x xxxxx x xxxx xx xx x xx x x xxx x x x x x x xx xx x xx xxx xx xxx x xx xxx xx x x x xx xxx xxxx xx xxx xx x xxxx xx xx xx x xx xxx xxxx x xxx xx x xx x x x xxx Vy (m/s) 0.25 0 -0.25 0.5 PIV&ESPI 2.5 2.25 0.5 PIV&ESPI 2.75 xx xxxx xx xx xxx xxxxx xxx x x x x xxxx xxxxx xxxxx xx xxx xxxxx xx xx x xxxx x xx xxx x x x x x x x xxxx xxxxx xxxxxx xx xxx xx x xx xxx xx xx xxxx x x x x x x xxxxxxx xx xx xxx xx xxx xx xx xx x xx xxxx xx xxx xx xx xxxx x xx x xx x x x x x x xxx xx Vx (m/s) PIV&ESPI PIV&ESPI 3 Vz (m/s) x x x xxxxxx xxxx xxx xx xxxxx xxx xxxx x x xxx x x x x x x x x xx xx xxxxx xxxx xx xx xx xx xx x xx x xx xx x xx xx x x xx xx x xxx xx x xx x xx x x x xxxx x x xxxxxxx xxxx x x xxx xx x xx xx xx xxxx x x x x xxx xx x xx x xx xx xx xx xx xx xx x xx x x x x x x x xxx x x x x xx xx xxx x xx xx x x xxx x x xx x x x x x xx x xxx x x xx x x x x x x x x x x x x x xxxxxxxxx xxx xxx xx xxxxxxx x x xxxxxx xxx xx x x x xx 0.25 0 -0.25 -0.5 -0.5 -0.5 -0.25 0 0.25 SPIV 0.5 -0.5 -0.25 0 0.25 SPIV 0.5 Fig. 10. PIV and DSPI vs stereo PIV data for expe5 when using camera 1 (upper row) or camera 2 (lower row) for PIV in the PIV and DSPI analysis. 6 Conclusions The feasibility of PIV and DSPI as 3-C velocimetry technique has been demonstrated. The 3-C velocity field has been measured in a turbulent boundary layer flow set in a windtunnel running at 3m/s. The quantitative comparison of single realizations simultaneously measured with PIV and DSPI and stereo PIV shows an accuracy better than 2%. 360 Session 6 x (mm) -10 -20 0 x (mm) 10 20 -20 x (mm) 10 20 -20 10 20 30 0 10 20 30 40 1 m/s 10 20 Vz (m/s) 0.15 0.10 0.05 0.00 -0.05 -0.10 -0.15 -0.20 -0.25 10 20 30 40 1 m/s 50 60 0 0 40 50 -10 -10 Vz (m/s) 0.35 0.30 0.25 0.20 0.15 0.10 0.05 0.00 -0.05 -0.10 -0.15 -0.20 -0.25 -0.30 -0.35 -0.40 y (mm) 0 y (mm) 0 -10 Vz (m/s) 0.35 0.30 0.25 0.20 0.15 0.10 0.05 0.00 -0.05 -0.10 -0.15 -0.20 -0.25 -0.30 y (mm) -10 -10 1 m/s 50 60 60 a) b) c) Fig. 11. 3-C velocity data from PIV and DSPI for: a) expe2; b) expe3; c) expe4. A mean velocity of 2.5m/s has been subtracted from VX. 2 2.5 SPIV 2.75 1.75 Vy (m/s) 0.25 0 x -0.25 0.5 xxxxx xxxxx xxxxx xx x xxxxx x x xxx x x x x x xx x xx x xx xxxxxx x xx xx x x xx x x x xx x x x x xx x x xx x x xxxx xx xx x x x xx x x xx xxx xx xx xx x x x xx xx xx x xxx x x xx xx x x x x xx x x x xx xx x xx x xx xx x xx x xx xx x x x xx xxx x x x x x x x x x x x x x x xxxxxxxxx xx x xx 0 0.25 SPIV 2.5 x 0.5 0.5 0 -0.25 0 0.25 SPIV -0.25 0 0.25 SPIV 0.5 b) 2.75 0.5 0 0.25 0 -0.25 -0.5 -0.5 -0.25 0 0.25 SPIV 0.5 c) 2.25 2 0.5 xx x x 2 2.25 2.5 SPIV 2.75 3 Vy (m/s) 0.25 xxx xxx xxxx xx xxx x xx x x xx xx x x xxx x x xx x xx xx xx xx x xxx xx xxxxx x x xx x xx xx xx xxxx xxxx xx x xx xx x xx x xx xx x xxxxx xx xx xx x x xx xxx xx x xxxxxxxxxx xxxxxx x x x xxx x x xx xx xxx x x x xx x x xxxxx xxx xx xxx xx x xxxx xx xx x x x xx xxxx 0 -0.25 x -0.5 -0.5 x xx xxxx xxx xxxxx x xx x x xxxx x xx xx x xxx xx xxx x xxx x xx xxx xx xx xx x xx x x x xx xx x x x xxx x x x xx xxx x xx xxx xxxx x x xx xxx x x x x x x xx xx xxxx xx x xxx xx xx x x xx x xxxxxxxx x xx xxxxx x x x x x xx xxxxx x x x x xx x x x x xx x x x xx x x x xx xxxx xx xx x xx xx xx x xxx xx x xxx x xx xxx xx xxx x xx xxxxx xx xx xx xxxx xxxx xx xx xxx xxx xxx xx xxxx xx xx xxx xx xx xx x xxxxxx x x x x x xxx xx x x xx x x x x x x x xxx xxxx xxxxx xx xx x xx xxxx xx x xx xxx xx x x x xx x xx xxx x x x x xxx x xx xx xx x xxx x x x Vx (m/s) 2.5 1.75 1.75 3 xx xxxxxx xxx x xxxxx xxx xx xx xxxxxx xx x xx xxxx xxxx xx xxx xx xxxx x xx x x x xxx xxx xxx x xx xx x xx xx xx xxx xxxx xx xx xxx x xx xxx xx xx xx x x xx x x x x x x x x x x x x x x xxx x xx xxxx x x x xx xxxx xx xx xxxx xx x x xx xx xx xx xxxxx xx x xx xx xx x x x xx xxxx xxxxxxx xx xxx xx xx xx xx xx xxx xx xx xxxx x xx xx xx xxx x xx xxxxx xxx xxxxxx xxxxxxxx x xxxx xxxxx 0 0.5 -0.5 -0.5 2.25 2.5 SPIV Vy (m/s) 0.25 -0.25 Vz (m/s) 0.25 -0.25 -0.5 2 -0.5 -0.5 xx xxxxx xx xxxx xxx xxxxxxx xx x xx xxx xxx x xx xx xx x xx x xxx xx xxx x xx xxx x xxxx xx x x xx x x x xx x xx x xxxx xxx x xx xx xx x xx xx x xxxx xx x x xxxxxxx xx x x x xx x x xxxx xx x x x x x xxxx xx x xx x x x x x x xx x xx xx xx x x xx x xx x x xx x x x xxxxxx x x x x x x x x x x x xxxx xx x xxx xx x xxx xxx xxxx x x xx xxxxxx xx 2.25 1.75 1.75 2.75 x x xxx xxx x xx xxxx xxxx x x xx xx x xxxx xxxx xx xx x x x xx xxxxxx x x xx xx xx xx xx xxx x xx x xxx x xx x x xx xxx x x x x xx x x x x x x xx xxx x xxx xx xxxxxx xxx xxx xx x xxxx xx xx xx xx xx xxxx xx xx x xxx x xxx xxx xxxx xx x xx x xxx xx xx x xx x xx x xxxx xxxx xxx xxx xx xxxx xxx xxx xxxx xx x 0 0.5 PIV&ESPI PIV&ESPI -0.25 Vz (m/s) 0.25 -0.25 a) 2.25 SPIV -0.5 -0.5 0.5 Vy (m/s) 0.25 -0.25 -0.5 2 2.5 2.75 PIV&ESPI PIV&ESPI 3 3 xx xxxxx xxxxx x xx xx xx xx xxx x xxx xx xx xx x xxx xx xx x xx xx xx xxx xx x xx xx x xx x xxx x x x x x x x xxx xxx xxx xxxx xxx x xxx xx xxx xxx xx xxxx xxxx xx xxxxx xx xxxxxx xxx xxxx xx xxx xx x Vx (m/s) 2 PIV&ESPI PIV&ESPI 0.5 2.25 2.75 PIV&ESPI x Vx (m/s) -0.25 0 0.25 SPIV 0.5 -0.5 Vz (m/s) 0.5 xxxxx x x xxxxxxx x xxx xx xx xx xx xx x xxx xxx x xx xx x x xx xx x x x xx xx xxxx xx x xx x xxx xx xx x xxxx x xx x xx xx xxx xxxx x x xx xx xx xxxxxxx xx x x xx xxx x xxx xxx x x xx xx xx xx xx x x xx x xxxx x xxx xx x x x x x x x x x x x x xxxxxxx xx xxxxxxxxxxxx xxx x xx xxx x xxxxxxxx xxxxxxxxx xx xxxx xxxxxxxxxxxxx xxx xxxxxxx x xx x xx x x xxx xx xx xx -0.5 -0.25 0 0.25 SPIV PIV&ESPI 2 PIV&ESPI PIV&ESPI 2.5 2.25 3 x xx xx xxxxxx xxxxx xxx x xxxxx xx xxxx xx xxx x xxxxx xxxxx x x x x xx 2.5 xxxxxx xx xx xxxxx xx xx xxx x x xx xx xx xxx xx x xx xxx x xxx xx xx xx xx x xx 2.25 xx xx x x xxx x xx xx xxxx x xxx xx x x x x xxx xxx 2 xxxxxx x xx xxxx xxxxxx xxxx xxx xxxxxx xxx 1.75 xxxx xx x x 2.75 PIV&ESPI x xxx x xxx x xx xx xx xxx x xx x xx xx xxx xxxx x x x xxx xxxxxx xx xx x xxxx x x x xx xxx x x x x x x xx x x x x x x xxxxx xxxx xxxx x xxx xx xxx xx xxx x xx xx xx x xxxx xxxxx xxxxx xx xxx xx xxxxxxxx xx xxxxxxxx xxxx xx xxx xx xxx xxx xx Vx (m/s) PIV&ESPI 3 2.75 -0.25 0 0.25 SPIV 0.5 Vz (m/s) 0.25 x xxx xx xx xx xx x xx x x xx xx x xxx x x x x xxx xx x xx x xx xx x x xx x x x x xx x xx x x xx x x xx xx xx xx x xx xx xx xxxxxxxxx x xxxxx xx xx xx x x xx xx x x x xx xx xx xx xxxxxx xxxx xx xxxx xx x x x xx xx x x xx x x xxx x xx xx xx x x x xxxxx x x xxx x xxx xx x x xx xx xx 0 -0.25 -0.5 0.5 d) -0.5 -0.25 0 0.25 SPIV 0.5 Fig. 12. PIV and DSPI vs stereo PIV data for: a) expe1; b) expe2; c) expe3; d) expe4 Acknowledgements: This research was supported by a Spanish Research Agency Grant (DPI20001578-C02-02) and by the EUROPIV 2 project. EUROPIV 2 (A joint program to improve PIV performance for industry and research) is a collaboration between LML URA CNRS 1441, DASSAULT AVIATION, DASA, ITAP, CIRA, DLR, ISL, NLR, ONERA and the Universities of Deft, Madrid, Oldenburg, Rome, Holography and ESPI 361 Rouen (CORIA URA CNRS 230), St Etienne (TSI URA CNRS 842), Zaragoza. The project is managed by LML URA CNRS 1441 and is funded by the European Union within the 5th framework (Contract nº G4RD-CT-2000-00190). We also would like to acknowledge the support form Lavision, who lent us two cameras and adapted their acquisition software especially for these experiments and from Dr. Royer, who helped with the optical setup. References 1. Prasad AK (2000) Stereoscopic Particle Image Velocimetry. Exp in Fluids 29:103-116 2. Arroyo MP, Andrés N, Quintanilla M (2000) The development of full field interferometric methods for fluid velocimetry. Opt Laser Technol 32:535-542 3. Andrés N, Arroyo MP, Hinrichs H and Quintanilla M (1999) Digital speckle pattern interferometry as a full field fluid velocimetry technique. Opt Lett 24:575-577 4. Andrés N, Arroyo MP, Zahn H and Hinrichs H (2001) Application of digital speckle pattern interferometry for fluid velocimetry in wind tunnel flows. Exp in Fluids 30:562-567 5. Grant I (1994) Selected papers on particle image velocimetry. SPIE Milestone Series MS99. SPIE Optical Engineering Press, Bellingham, Wash 6. Saldner HO, Molin NE, Stetson KA (1996) Fourier-transform evaluation of phase data in spatially phase-biased TV holograms. App Opt 35, 2:332-336 7. Malacara D, Servín M, Malacara Z (1998) Phase Detection Algorithms. In: Interferogram analysis for optical testing, Marcel Dekker Inc, New York, pp 169-247 8. Servin M, Cuevas FJ, Malacara D, Marroquin JL and Rodríguez-Vera R (1999) Phase unwrapping through demodulation by use of the regularized phase-tracking technique. App Opt 38, 10:1934-1941 9. Soloff SM, Adrian RJ, Liu ZC (1997) Distortion compensation for generalized stereoscopic particle image velocimetry. Meas Sci Technol 8:1441-1454 10. Willert C (1997) Stereoscopic digital image velocimetry for application in wind tunnel flows. Meas Sci Technol 8:1465-1479