An Optimal Algorithm for Finding the Kernel of a... K(P)
advertisement
")
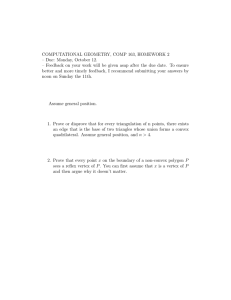
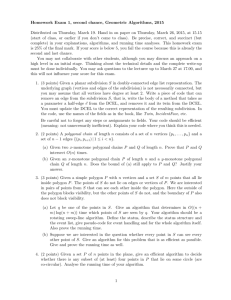
An Optimal Algorithm for Finding the Kernel of a Polygon D. T. LEE AND F. P. PREPARATA Umverstty of llhnots at Urbana-Champatgn, Urbana, llhnots ABSTRACT The kernel K(P) of a simple polygon P wah n verUces is the locus of the points internal to P from which all verUcesof P are wslble Equwalently, K(P) is the mtersectmn of appropriate half-planes determined by the polygon's edges Although it is known that to find the intersection of n generic half-planes requires time O(n log n), we show that one can exploit the ordering of the half-planes corresponding to the sequence of the polygon's edges to obtain a kernel finding algorithm which runs m time O(n) and is therefore optimal KEYWORDSANDPHRASES computatmnal complexay, optimal algorithms, simple polygon, kernel of polygon CR CATEGORIES 4 49, 5 25, 5 32 1. Introduction T h e kernel K(P) o f a simple polygon P is the locus o f the points internal to P which can be j o i n e d to every vertex o f P by a segment totally contained in P. Equivalently, if one considers the b o u n d a r y o f P as a counterclockwise directed cycle, the kernel o f P is the intersection o f all the half-planes lying to the left o f the polygon's edges. Shamos and H o e y [1] have presented an algorithm for finding the kernel o f an n-edge polygon in time O(n log n). T h e i r algorithm is based on the fact that the intersection o f n generic half-planes can be found in time O(n log n); they also show that fl(n log n) is a lower b o u n d to the time for finding the intersection o f n half-planes. H o w e v e r , this lower b o u n d does not apply to the p r o b l e m o f finding the kernel, since in the latter case the halfplanes are ordered according to the sequence of the edges o f P, nor does their algorithm take advantage o f this order. In this note we shall show that, indeed, this ordering can be exploited to yield an algorithm which runs in time linear in the n u m b e r o f the edges. Obviously, since each edge must be examined, the time o f our algorithm is o p t i m a l within a multiplicative constant. T h e m o d e l o f c o m p u t a t i o n used for the above results, which we shall also adopt in this paper, is a random-access m a c h i n e ( R A M ) w a h r e a l - n u m b e r arithmetic, i.e. with the capability o f performing comparisons o f real numbers and rational operations on real numbers. T h e input polygon P is represented by a sequence o f vertices Vo, vl . . . . . vn-l, with n _> 4, in which each v, has real-valued x- and y-coordinates (x,, y,), and (v,-1, v,) (see F o o t n o t e 1), for i = 1, 2 . . . . . n, is the edge o f the polygon connecting vertices v,_~ and v,. F o r ease o f reference we shall describe P by a circular list o f vertices and intervening edges as voe~v~e2 ... en-lvn-leovo, where e, = (v,_~, v,). W e also Impose a direction u p o n each edge Permission to copy without fee all or part of this material is granted provided that the copies are not made or distributed for direct commercial advantage, the ACM copyright notice and the tale of the pubhcatlon and its date appear, and noUce is gwen that copying is by permission of the Assooatlon for Computing Machinery To copy otherwise, or to republish, requires a fee and/or specific permission This work was supported by the National Science Foundation under Grant MCS 76-17321 and by the Joint Services Electronics Program under Contract DAAB-07-72-C-0259 Authors' present addresses D T Lee, Department of Electncal Engineering and Computer Science, Northwestern Umverslty, Evanston, IL 60201, F.P Preparata, Coordinated Science Laboratory, UmversRy of llhnots at Urbana-Champalgn, Urbana, IL 61801 All radices are taken modulo n © 1979 ACM 0004-5411/79/0700-0415 $00 75 Journal of the Association for Computmg Machinery, Vol 26, No 3, July 1979, pp 415.-421 416 D. T. LEE AND F. P. PREPARATA vi fi jJ t I / ~ vn-I / Kx FIG ! Illustrationof the definitionof F, and L, F]G 2 Illustrationof polygon Kj such that the interior of the polygon hes to the left oi~ the edge, or, eqmvalently, the boundary of P is directed counterclockwise. A vertex v, is called reflex ff v,+~ hes to the right of the line containing e, and directed like e,, that is, if the interior angle at v, is larger than 180°; a vertex is called convex otherwise. We also assume that the intenor angle at a convex vertex v, be strictly smaller than 180°, since the elimination of straight-angle vemces does not change P and can be done by a preliminary scan of the boundary of P in time O(n). It is obvious that the kernel of P, being the intersection of half-planes, is a convex polygon K(P) and is bounded by at most n edges. Thus if the kernel is nonempty, the output will also be represented by the sequence of vemces and edges of the polygon K(P). 2. The Algorithm The algorithm we shall outline scans in order the vertices of P and construct a sequence of convex polygons KI, K2. . . . . Kn-1. Each of these polygons may or may not be bounded. We shall later show (Lemma 1) that K, is the common intersection of the half-planes lying to the left of the &rected edges e0, e~, ... , e,. This result has the obvious consequences that K , - i = K(P) and that K1 D K2 D ... _D K,; the latter implies that there is some r > 1 such that K, is u n b o u n d e d or bounded depending upon whether t < r or i _> r, respectively. Notationally, if points w, and w,+~ belong to the line containing the edge % of P, then w,esw,+x denotes the segment between w, and w,+~ with the same direction as e , . When a polygon K, is unbounded, two of its edges are half-hnes; so, A e w denotes a half-line terminating at point w and directed like edge e, while weA denotes the complementary half-line. During the processing, the boundary of K is maintained as a doubly hnked hst of vertices and intervening edges. This list will be either linear or circular, depending upon whether K, is u n b o u n d e d or bounded, respectively. In the first case, the first and last item of the list will be called the list head and list tail, respectively. Among the vertices of Ks we distmgmsh two vertices F, and L,, defined as follows. Consider the two lines of support 2 of K, through vertex v, of P. Letf~ and l, be the two halflines of these hnes which contain the points of support, named so that the clockwise angle from f, to l, in the plane wedge containing K, is no greater than ,r (Figure l). Vertex F, is the point common to f, and K, which is farthest from v,; L, is slmdarly defined. These two vertices play a crucial role in the construction of K,+i from K,. If P has no reflex vertex, then P is convex and trivially K(P) = P. Thus let vo be a reflex vertex of P. We can now describe the kernel algorithm. Inmal Step We set K~ equal to the intersectionof the half-planeslying to the left of edges e0 and e~, i e K1 *Ae;voeoA (Figure 2) F1 ~ point at infinityof Aelv0, L1 ~ point at Infinityof VoeoA 2Recall that l is a line of support of a polygonP if l has at least one point In commonwith P and the interiorof P entirelylies on one side of l