Time Dependent vs. Steady State Calculations of External Aerodynamics Abstract
advertisement

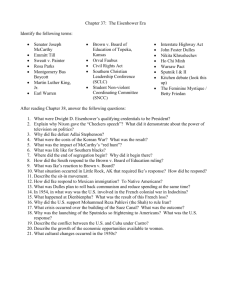
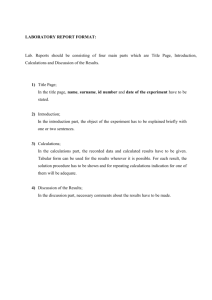
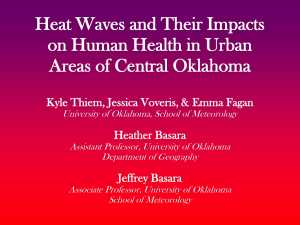
Time Dependent vs. Steady State Calculations of External Aerodynamics B. Basara and P. Tibaut AVL List GmbH, Hans List Platz 1, 8020 Graz, Austria Abstract The paper assesses the use of the most popular standard k-e model and the most accurate Reynolds-stress model for various simple and complex flows including vehicles, and their impact on steady and transient RANS calculations. At the same time, the error of the steady state approach for the flows where transient effects are important, is analyzed. The Hybrid Turbulence Model is examined as an alternative solution, e.g. the recent proposal of combining the Boussinesq’s concept with the second moment closure. Finally, new possibilities in the further use of steady and averaged transient results will be addressed e.g. acoustic calculations. The paper compiles previous and present work performed at AVL List GmbH using the inhouse commercial CFD software AVL Swift. Introduction Most of reported calculations of external aerodynamics have been done with Reynolds-Averaged-Navier-Stokes (RANS) methods. The basis behind these methods is decomposition of the instantaneous flow variable into a mean and a fluctuating (random) part and then ensemble averaging of the Navier-Stokes equations. The resulting new (unknown) terms, namely Reynolds stresses, require turbulence modeling. This is very discouraging for some CFD users as turbulence models, despite the recent progress, are considered to be the largest source of error in present calculations. While it is not possible to eliminate this error, it can be decreased considerably by the knowledgeable use of turbulence models. A frequent ‘simplification’ in the use of RANS is to make steady state calculations. However, to insist on the steady state solution because it is inexpensive, is a very risky practice which could lead to serious errors in particular cases. The first alternative is to use the Transient Reynolds-Averaged Navier-Stokes (TRANS) approach. This is particularly important in flows which are dominated by lowfrequency periodic features such as encountered in a vortex shedding. 108 B. Basara and P. Tibaut An extreme example of introducing error via steady state approach can be shown by using a vortex-shedding flow around a simple obstacle – square cylinder. The case calculated is the one studied experimentally by Lyn 1992 at Re=21400. The standard k-e model predicts a weak vortex shedding largely underestimating the measured values as shown in Table 1. The same table shows calculated steady and transient drag and lift coefficients as predicted by the RSM. The steady state calculations are enforced by introducing the symmetry plane through the mid plane of the obstacle. Table 1. Predictions and measurements of integral parameters. Transient RSM Transient k-e Steady RSM Measurements Cd 2.28 1.80 1.89 2.16-2.28 Cl’ 1.39 1.1-1.4 Str 0.141 0.119 0.130-0.139 Fig. 1 shows time histories of lift coefficient as calculated by Reynolds-stress model (RSM). The results are in agreement with previous reported calculations (e.g. Franke and Rodi 1991, Basara 2004). Fig. 1. Time evolution of lift coefficient as predicted by RSM (Basara 2004 ). The phase averaged data was calculated as suggested by Rodi and Ferziger 1995 for the Workshop on LES of Flows Past Bluff Bodies. The time period between two successive maximums is divided into 20 equal intervals and the predicted streamlines are compared with the measurements for the same phases. Nevertheless, Fig. 2. shows a good agreement between predictions and measurements for the phase 01, for more details see original reference Basara 2004. The next step was to use the RSM for the steady state calculations enforced by employment of the symmetry plane. Predicted streamlines are shown in Fig. 3. The separation process around the cylinder is described as one very large vortex starting at the first front corner and finishing ten lengths behind the obstacle. The predicted drag coefficient is 15% lower than obtained by measurements showing that this procedure is inappropriate, although the full Reynolds-stress model was used, see Table 1. Time Dependent vs. Steady State Calculations of External Aerodynamics 109 Fig. 2. Phase averaged streamlines (Phase 01): measurements (left) and predictions (right) with the RSM (Basara 2004) Fig. 3. Streamlines predicted by the RSM and for the steady state flow. However, it should be noted that there is not much benefit in using transient RANS if the turbulence model chosen for the calculations poorly reproduces transient effects e.g. the standard k-e model. The next adequate test for the turbulence models prior to their use for the vehicle aerodynamics is the vortex shedding around a cylinder placed at various distances from an adjacent wall. When the gap between the obstacle and the wall was reduced to 0.5 of the obstacle width, the vortex shedding was predicted with the Reynolds-stress model as reported by the measurements, quite contrary to the standard k-e model which predicted steady flow, see Bosch and Rodi 1995, Basara et al. 1996 etc. These simple benchmarks were used to assess the basic differences of steady and transient calculations using the standard k-e model and the RSM. The other models e.g. non-linear k-e models or algebraic stress models were not tested assuming that the RSM represents the best turbulence modeling approach. In the last few years, attention has been turned more to the numerical aspects of the RSM’s employment in order to make this model numerically robust for real-life vehicle simulations. Consequently, the new hybrid modeling approach was developed providing additional options for more accurate prediction of turbulence, but at the same time having a numerically robust model. The basis of the modeling approach, the solution method and the results are given in the following sections. 110 B. Basara and P. Tibaut Mathematical Modeling and Solution Procedure Grid generation is a process that is very dependent not only on the grid generator but also on the CFD user. Requests for a fast and simple grid generator and for a quality grid are almost always in contradiction. Fast grid generators regularly create unstructured grids consisting of arbitrary shaped computational cells. Cutting the grid generation time very often causes longer computing time and less accurate and more grid-dependent results. In general, such grids require that the solver is capable of handling any cell type. This technology is used in AVL under the name of Arbitrary Cell Technology (ACT). A typical grid created by the automatic grid generator AVL FAME is shown in Fig. 4. Fig. 4. Ford Ka. Numerical grid: upper part (left) and underbody (right). The ACT in AVL Swift v3.1 (Swift Manual 2002) is based on a fully conservative finite volume approach. The cell-face based connectivity and interpolation practices for gradients and cell-face values are introduced to accommodate an arbitrary number of cell faces. All dependent variables, such as momentum, pressure, density, turbulence kinetic energy, dissipation rate, and passive scalar are evaluated at the cell center. A second-order midpoint rule is used for integral approximation and a second order linear approximation for any value at the cell-face. A diffusion term is incorporated into the surface integral source after employing the special interpolation practice. The convection is solved by a variety of differencing schemes (upwind, central differencing, MINMOD, and SMART). The rate of change is discretized by using implicit schemes, namely Euler implicit scheme and three time level implicit scheme of second order accuracy. The overall solution procedure is iterative and is based on the Semi-Implicit Method for Pressure-Linked Equations algorithm (SIMPLE). For the solution of a linear system of equations, a conjugate gradient type of solver and algebraic multigrid are used. Special attention is given to the implementation procedure of the RSM on arbitrary unstructured grids, see Basara 2004. The flow field is modeled by the ensemble-mean Navier Stokes equations coupled either with the eddy-viscosity k-e model equations or with the differential Reynolds stress model equations. In the k-e model of turbulence, the Reynolds stresses are obtained from the Boussinesq’s eddy viscosity formulation: Time Dependent vs. Steady State Calculations of External Aerodynamics 111 Results and Discussion In the last decade, a number of AVL articles related to the use of the full Reynolds stress model for the vehicle aerodynamics were published, e.g. Basara and Alajbegovic 1998, Basara et al. 2000, Basara, Przulj and Tibaut 2002. Precise conclusions can be drawn from previous published calculation results. The first apparent detail was the correct prediction of the flow separation from the rear window by the Reynolds stress model. The calculated velocity profiles in the 112 B. Basara and P. Tibaut separation region compared well with the measurements. Trailing vortices appeared at the C-pillars pulling the attached flow coming from the roof down to the base, were always better predicted by the RSM. With the k-e model, a starting poposition of these side vortices at the C-pillars is lower than the measured one. In the case of RSM model, a description of the flow pattern over the slant is very close to the measured one. In addition, smaller vortices which might appear on the side edge due to interactions between two streams could be captured as well, see Basara et al. 2002 (see Fig. 5). As the separation point is crucial for accurate predictions of the pressure distribution on a car body, the average drag and lift coefficients predicted by the RSM model were closer to the measured values than those obtained by the k-e model. The correctness of the flow pattern predicted by the RSM model is definitely confirmed by distribution of the pressure coefficient on the upper side of the car (see Fig. 5). The k-e model predictions of pressure distribution miss measurements considerably. The flow pattern was also calculated correctly for Morel body by Basara and Alajbegovic 1998. Very good agreement was obtained, especially in the case of transient (unsteady) simulations. Steady state calculations even with the RSM model were not able to predict sudden pressure drop caused by changing the back slant angle. On the other hand, the transient calculations showed presence of vortex shedding and averaged drag and lift coefficients were close to measurements. 1,5 DATA SWIFT k-eps 1 SWIFT RSM 0,5 0 0 0,2 0,4 0,6 0,8 1 -0,5 -1 -1,5 Fig. 5. Velocity vectors at the trailing edges and the distribution of the pressure coefficient as predicted by RSM (Basara et al. 2002) Clearly after all these calculations of the flow around simple obstacles and idealized vehicles, the procedure for the reliable calculations could be established. It consists of the following steps: -to provide steady state results with the k-e model. -to continue with the steady state calculations by using the RSM model approximately making the same number of iterations as performed with the ke model. -to continue with the transient calculations by using the RSM. Therefore, after calculating SAE notchback reference body (Basara et al. 2002), Ahmed Body (Basara and Jakirlic 2003) or Morel Body (Basara and Alajbegovic 1998) etc., the same procedure was applied for more complex models. The next example was the first including the wheels. Prior to this simulation, separate calculations of the flow around a rotating wheel were performed (Basara, Beader and Przulj 2000), see Fig. 6. Again good performances of the RSM were reported re- Time Dependent vs. Steady State Calculations of External Aerodynamics 113 garding the pressure distribution as well as the prediction of the separation point, for more details see the original reference. Fig. 6. Numerical grid (left) and predicted and measured mean pressure coefficient around the wheel in the mid plane (right). Basara et al. 2000. Calculating a complete vehicle with the wheels (Renault model), once more, a difference between models performances becomes apparent. Clearly the flow predicted by the k-e model shows less tendency to separate either on wheels or on the slanted back comparing to the RSM results as shown in Fig. 7 and 8. Fig. 7. Renault model. Velocity vectors around the wheel as calculated by the k-e (left) and the RSM (right). Transient results were obtained by the RSM (see Fig. 8 right) and the averaged drag and lift coefficients are in good agreement with the measurements. The RSM calculates the time-mean drag coefficient of 0.2 (-0.2% error). That compares well with the measurements and quite contrary to the k-e result of 0.223 (+9.8% error). RSM k-e 0,26 0,24 cd [-] 0,22 0,2 0,18 0,16 0,14 0 500 1000 1500 2000 2500 3000 time step [-] Fig. 8. Renault model. Velocity vectors on the slanted rear as predicted by the RSM and the k-e model (left) and the calculated drag coefficient by the RSM (right). 114 B. Basara and P. Tibaut The next step was to calculate a vehicle with the detailed underbody (Ford Ka), see Fig. 4. Numerically, this was a challenging task for the calculations with the full Reynolds-stress model. However, it was possible to perform such numerical study as shown in Fig. 9. It should be noted that the computing time is 4-5 times larger than when using the k-e model. Predicted pressure distribution in the wake behind the vehicle is compared with the measurements in Fig. 10. The best fitting shape is achieved with the RSM. The pressure coefficient distribution along the upper central plane of the body predicted by the k-e and RSM model is shown in Fig. 11. The averaged drag and lift coefficients are given in Table 2. In general, the results obtained by the RSM are very satisfactory. Fig. 9. Ford Ka. Surface streamlines (left) and the velocity magnitude projected on the surface (right). Table 2. Ford Ka. Predictions and measurements of drag Cd and lift Cl coefficients. Ford Ka Data k-e RSM Cd 0.321 0.355 0.319 k-e Data cp tot 0.0 Cl 0.076 0.226 0.043 0.5 RSM 1.0 Fig. 10. Ford Ka. Predicted pressure coefficient in the wake behind the vehicle. Time Dependent vs. Steady State Calculations of External Aerodynamics 115 Fig. 11. Ford Ka. Distribution of the pressure coefficient on the upper side. Volvo VRAK shown in Fig. 12, was calculated by using the k-e model and AVL HTM model. The obtained results highlight the importance of using a more accurate model to calculate the turbulence. The HTM approach was previously tested on many simple examples including all cases shown in the introduction (Basara and Jakirlic 2003). It provides regularly more robust and faster solution than the RSM and more accurate results than the k-e model. In this case, transient solution was obtained by the HTM, see Fig. 12 right (see also Basara et al. 2001). The averaged drag and lift coefficients are given in Table 3. The results obtained by the HTM agree much better with the measurements than those obtained by the k-e model. The HTM requires half less computing time than the RSM. Note that the HTM model can be also applied as an ‘initialization’ model used between the k-e and RSM models in order to stabilize and shorten RSM calculations. Table 3. Volvo VRAK. Predictions and measurements of drag Cd and lift Cl coefficients. Data k-e HTM Cd 0.359 0.368 0.351 Cl 0.336 0.466 0.365 Fig. 12. Volvo VRAK. Velocity magnitude projected on the surface (left) and the averaged transient drag coefficient (right). One can argue that different turbulence models may give a similar drag or lift coefficient for the certain shapes of the car and hence, those models which need less computing time would be preferable for such calculations. But, this may hap- 116 B. Basara and P. Tibaut pen only in isolated cases. For example, the flow pattern can be very similar due to the fact that the separation points are fixed by the shape of the vehicle. However, even in such cases, the intensity and the distribution of the calculated turbulence kinetic energy will be different and therefore, the input to some other calculations modules could be wrong e.g. acoustic predictions, soiling etc. Fig. 13 shows simplified bus and the calculated turbulence kinetic energy. Based on these results, calculations of flow-induced noise are performed jointly by AVL-TNO showing an importance of proper predictions of the turbulence kinetic energy. The method developed by TNO (e.g. Snelen et al. 2002, Blom et al. 2001) consists of the unsteady acoustic source generation based on the RANS data and the calculation of the propagation of the pressure fluctuations using the linearized Euler equations. The results are available on request. 2 2 2 2 Turbulence Kinetic Energy [m /s ] Turbulence Kinetic Energy [m /s ] 0 0 43 43 Fig. 13. Simplified bus. Predicted turbulence kinetic energy by the k-e model (left) and the RSM (right). Conclusion Calculations performed for the simple and complex real-life benchmarks show that there is consistency in the results obtained when using different turbulence models. Compared to the standard k-e model, the present Reynolds-stress transport equation model continuously produces results which are in better agreement with the measurements. The hybrid turbulence model is a good compromise in modeling regarding the accuracy and the computing time. It is necessary to perform transient RANS calculations in order to get accurate results for the external aerodynamics. References AVL AST (2002) Swift Manual 3.1. AVL List GmbH. Graz. Lyn DA (1992) Ensemble-Averaged Measurements in the Turbulent Near Wake of a Square Cylinder: A Guide to the Data, Report CE-HSE-92-6, Sc, Purdue University. Franke R, Rodi W (1991) 8th Symp. On Turbulent Shear Flows. Munich. Rodi W, Ferziger JH (1995) Proc. Of Workshop on Large Eddy Simulation of Flows past Bluff Bodies, Germany. Basara B (2004) Employment of the second-moment closure on arbitrary unstructured grids. Int. J. for Numerical Methods in Fluids 44: 377-407. Bosch, G. Rodi W (1995). 10th Symp. On Turbulent Shear Flows, Pennsylvania. Time Dependent vs. Steady State Calculations of External Aerodynamics 117 Basara B., Bachler G, Schiffermuller H. (1996) Calculation of vortex shedding from bluff bodies with the Reynolds-stress model. In: Kutler P, Flores J and Chattot J (eds) 15th International Conference on Numerical Methods in Fluid Dynamics, Lecture Notes in Physics. Springer. Speziale CG, Sarkar S, Gatski TB (1991) Modelling the pressure-strain correlation of turbulence: an invariant dynamical system approach. J Fluid Mech 227: 245-272. Basara B, Jakirlic S (2003) A New Turbulence Modelling Strategy For Industrial CFD. Int. J. for Numerical Methods in Fluids 42: 89-116. Basara B, Decan B, Przulj V (2000) Numerical Simulation of the Air Flow around a Rotating Wheel. The 3rd Mira International Vehicle Aerodynamics Conference, UK. Basara B, Alajbegovic A.(1998) Steady state calculations of turbulent flow around Morel Body, The 7th Int. Symp. on Flow Modelling and Turbulence Measurements. Taiwan. Basara B, Przulj V and Tibaut P (2002) On the calculation of external aerodynamics: Industrial Benchmarks. SAE Transactions - Journal of Passenger Cars and Mechanical Systems V110-6. Basara B, Jakirlic S, Przulj V (2001) Vortex-shedding flows computed using a new, hybrid turbulence model. In: Ninokata H, Wada A. and Tanaka N. (eds), Advances in Fluid Modeling & Turbulence Measurements, World Scientific. Snellen M, Lier L, Rops C, Janssens M, Heck J, Strumolo GS (2002) Flow-induced noise around the A-pillar of an idealized car greenhous. AIAA paper 2002-2548. Blom CPA, Verhaer BT, Heijden JC, Soemarwoto BI (2001) A linearized Euler method based prediction of turbulence induced noise using time-averaged flow properties. AIAA paper 2001-1100.