The Status of Detached-Eddy Simulation for Bluff Bodies Philippe R. Spalart
advertisement

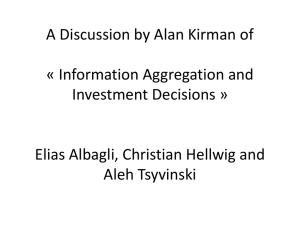
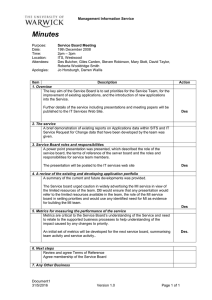
The Status of Detached-Eddy Simulation for Bluff Bodies Philippe R. Spalart1 and Kyle D. Squires2 1 2 Boeing Commercial Airplanes, PO Box 3707, Seattle, WA 98052, USA philippe.r.spalart@boeing.com MAE Department, Arizona State University, Tempe, AZ 85287, USA squires@asu.edu Proposed in 1997, DES was applied to an airfoil beyond stall in 1999, and then to a range of bluff bodies. Its accuracy has often been far superior to that of steady or unsteady Reynolds-averaged Navier-Stokes methods, and it avoids the Reynolds-number limitations that plague Large-Eddy Simulation. Cases fall into three classes: simple shapes such as cylinders and spheres; transportation components such as landing gear, simplified; and full airplane geometries. All are manageable on present computers, some even on personal computers. Simple shapes now and then yield surprises, but DES appears sound and reacts well to the type of boundary-layer separation (i.e., laminar or turbulent), and to grid refinement. However, it is possible to confuse the method by using a grid density that is both too fine for RANS and too coarse for LES. Component studies display progress, without reaching an industrial level of accuracy in predicting all forces. The few full-airplane predictions have been successful, thanks to high CPU power, and partly thanks to fixed separation lines. Progress and a proper dissemination in industry and by CFD vendors now depends on prudent improvements in numerics and in physical models, preferably without losing any of the simplicity of DES, and on communication with non-experts. The experimental database remains weak in some areas. Numerical issues include grid generation, code performance in unsteady flows, and numerical dissipation. Codes used for complex configurations stabilize the calculations via upwinding and/or limiters, and assessing their effects on DES predictions remains important. Slight improvements to the treatment of the “RANS region” of DES (essentially comprising the boundary layers up to separation) are also desired. Good gridding and time-stepping practices are both costly and crucial; deficiencies have often been traced to the grid. Few users have experience with LES, let alone with issues specific to DES, which are clarified here. The prediction of bluff-body flows at application Reynolds numbers will place heavy demands on the user, as numerous aspects of the 30 P.R. Spalart and K.D. Squires simulation must all be carefully controlled. Error-proof methods should not be promised, and the natural robustness of DES should not be abused. 1 Critical History of DES DES was inspired by estimates initiated in 1997 [1] and completed in 2000 [2], which indicate that Large-Eddy Simulation (LES) is not about to become practical for industrial flows, such as aircraft or road vehicles. This applies for about forty years, and is true even if it is assumed that “wall modeling” has become successful, in other words, that limits on the grid spacing in wall units such as ∆x+ have been removed within LES. Relevant to these estimates is the assumption that much of the boundary layer is turbulent; an assumption which is most reasonable in practice. The estimates have yet to be challenged by LES proponents, and too much work remains mired at unchallenging Reynolds numbers, from which clear conclusions cannot be made. Empirical evidence that strongly supports the estimates is offered by the LESFOIL workshops [3], for which the Reynolds number was sufficiently large to expose LES methodologies: current super-computers, even for a single simulation with a “designer grid” optimized by experts given detailed advance knowledge of the flow, can handle only an airfoil slice of the order of 1% of the chord, at a moderate Reynolds number and with a laminar stagnation region [4]. In other words, the real-life problem of a wing is roughly 1,000 times larger, even before the extra difficulties of sweep (giving a thin and turbulent attachment-line boundary layer) and of a full-size Reynolds number are included. When considering near-future industrial CFD methods capable in highReynolds-number bluff-body flows, experience and projections lead to a strong consensus that Reynolds-averaged Navier-Stokes (RANS) technology is indispensable in the large areas of thin attached boundary layers, and to a weaker consensus that pure RANS methods cannot provide sufficient accuracy in regions of massive separation. These regions are dominated by large, inviscid, geometry-specific eddies, which are excellent candidates for LES. As a result, hybrid methods are receiving wide attention. These considerations leave some leeway in designing a hybrid RANS-LES method. The first choice is between a method that is explicitly zonal, as opposed to a method that solves a single set of equations. DES reflects a strong preference for non-zonal systems and simple formulations. It involves a single grid and a single field for velocity, pressure, and even eddy viscosity, whether using the Spalart-Allmaras (S-A) model or the SST model as the RANS base [5]. The choice of model is of course an element of leeway, and a welcome opportunity to test the sensitivity of solutions. Simplicity is favorable in terms of repeatability between codes and users, and experience-building. The formulation using a single model only leads to a discontinuity in the gradient of the length scale that enters the destruction term of the turbulence model DES for Bluff Bodies 31 (this discontinuity would be easily removed by rounding the min function that determines the lengthscale). In contrast, explicitly-zonal methods often suffer from steep variations near the zonal interface, and much work is expended controlling these. The change in the lengthscale leads to a model that becomes region-dependent in nature – in most cases a RANS model in the boundary layers and a Sub-Grid-Scale (SGS) model within massive separation. Objections have been made to the use of the grid spacing ∆ in the formulation, but this appears absolutely natural. The foundation of LES is the existence of a filter width that controls the end of the energy cascade, and is available for reduction in order to increase the range of scales and therefore improve the physics of the simulation [2]. As separate issue, present in any LES, is whether the filter width and the grid spacing should be tied; a recent trend is to untie them, and seek a grid-converged solution for a fixed filter width. In all DES studies, they have remained tied; this appears to provide a balance between numerical and SGS-modeling errors, although this balance has not been established (which would be difficult to do beyond question, because in LES the error measures are quite arbitrary). Thus the nature of the SGS model inside DES is classical, and in particular its scaling is identical to that of the Smagorinsky model. It was adjusted to extend the inertial range in a classical Kolmogorov setting as far as possible [18]; this adjustment requires care when generalizing it to unstructured grids. There is no obvious accuracy advantage in solving a transport equation for the SGS eddy viscosity, instead of using a local algebraic formula; it is done for commonality with the RANS region. In addition to the formulation, there is also flexibility in the design of a DES simulation, primarily within the prediction of the boundary layer upstream of separation. In “natural” DES it is handled by the RANS model but there is a trend, at least in fundamental studies, to predict parts of the attached boundary layers with LES. The study of Nikitin et al. in a channel was conducted to explore such applications [6] and was quite successful. Commentators have focused on the imperfection in the skin friction, instead of the great simplicity of the approach and excellent Reynolds-number scaling both in terms of computing cost and accuracy. Applied to an airfoil in this limit, DES then resembles the LESFOIL exercise [3]. Keeping in mind that the unmanageable cost of LES arises due to the resolution requirements in the thin regions of the boundary layer, switching from RANS to LES is feasible only after the boundary layer thickens sufficiently. In this régime, LES treatment within the boundary layer is attractive since it is possible to exploit the accuracy of the technique and the grid-refinement possibilities inherent to the method – a proposition that is expensive, but represents an important and valuable research activity. A key concept underlying such an approach, and for that matter all applications of DES, is to clearly “steer” the simulation either to RANS or to LES behavior by means of the grid density. Unfortunately this can become delicate, and normally the detailed characteristics of a flow are not known in advance as, for example, is the case for LESFOIL. 32 P.R. Spalart and K.D. Squires Note that “natural” DES of the LESFOIL case, with its shallow separation, is essentially a RANS, and therefore has similar accuracy. In fact, RANS predictions are more accurate than LES has been to date, presumably because no LES has had both sufficient grid density and adequate spanwise extent. This judgment assumes the particular experiments on that airfoil are more accurate than CFD, which will not be true indefinitely. The objection to incorporating the grid spacing into the turbulence model in DES has one root in the inaccuracies encountered by careful users, as they gradually refine the grid starting from a natural DES [7, 8, 9]. This threat was illustrated in the initial DES paper [1]. Once the grid spacing in both directions parallel to the wall becomes smaller than about half of the boundarylayer thickness, the DES limiter reduces the eddy viscosity, thus “corrupting” it compared with its RANS level, but without allowing LES behavior. The resulting solution creates insufficient total Reynolds stresses (modeled + resolved stress [6]). There is no solution ready for release at present, and this adds to the burden on the DES user of checking that the RANS/LES interface is not deep inside the boundary layer. It also conflicts with the tendency to refine the grid at shock-boundary-layer interactions, either manually or automatically. However, the only true need is to refine in the direction normal to the shock, and therefore in a typical situation the shock-parallel spacing will keep ∆ large enough to avoid unintentional eddy-viscosity limiting. Some adjustments may be introduced, but removing the grid spacing altogether from the DES formulation is out of the question. Nearly all other hybrid methods currently under consideration sensitize the model to the grid in order to achieve LES behavior [10, 11, 12, 13]. As the exception, the SAS hybrid is free of grid spacing and has demonstrated, visually, LES-like behavior past a circular cylinder and a wall-mounted cube [14]. This gives much food for thought. On the other hand, it is still extremely new with only one conference paper, has not yet demonstrated LES behavior during grid refinement, and has simply failed to function as LES in a channel flow. New findings may appear rapidly. Another issue addressed in [1] is the “grey area” in which a shear layer, after separation, needs to generate “LES content” (random eddies) which it did not possess as a boundary layer upstream. The process of generating LES content is most easily achieved by a thin shear layer that is rapidly departing from the wall, typically thanks to a thin edge or sharp corner; greater uncertainty was anticipated over smooth-wall separations. Similarly, LES is widely expected to be more successful for bodies with sharp edges than smooth ones (even with laminar boundary layers; for turbulent separation LES poses a bigger challenge, and SGS models are sometimes naively used as RANS models in the entire thickness of the boundary layers). These considerations motivated the circular-cylinder study, which was quite re-assuring, see §2. A more extreme case is a shallow separation, either unclosed or a bubble. There, depending on the grid, the DES may not create any LES content. This is not incompatible with the original motivation for the method to achieve LES DES for Bluff Bodies 33 behavior only in massive separation, but shallow separation and especially reattachment also activate finite errors in any RANS model. In some cases it is desirable to explore the performance of LES in such flows, as already mentioned. An separate source of ambiguity exists in vortex-dominated flows, because the effect of the DES limiter and that of rotation/curvature (RC) corrections to RANS models on the eddy viscosity are similar. Consider a typical RANS model such as k-% or S-A. In a vortex, it produces much too high an eddy viscosity, rapidly smearing the vortex. This is well mitigated by RC corrections [15], which drastically reduce the eddy viscosity. Unfortunately, this is also what occurs in DES, relative to RANS, leading to the very real possibility of improving results by activating DES but for the wrong reason. The grid may be still much too coarse for robust LES content (especially considering the stabilizing effect of rotation), but the vortices will become more coherent and their low-pressure signature on the wall deeper, the effects expected from a good rotation term (see §2). Naturally, grid refinement by a large ratio would exhibit the problem, but that is very difficult in 3D. In general, extensive flow visualization is a much more practical step; the user needs to ask “does the solution really have LES behavior in the intended LES region?”. A discussion and manual to generating DES grids was funded by NASA, and can be downloaded [16]. At the time, it did not emphasize the issue of grid refinement parallel to the wall, outlined above; however many other concepts and examples can be found, and the report constitutes a fair starting point for a new DES user. We now turn to examples drawn from recent studies. 2 Simple Objects The circular cylinder remains a major challenge to bluff-body CFD methods of any type, and gives an excellent arena in which to make DES succeed, or fail. Even shapes reputed to be less challenging such as square cylinders cannot be considered as “solved” even with over 106 grid points [17]; however it is plausible that a simple increase in resolution past 107 points will be quite helpful (the workshop [17] took place in 1995). Ensuring a good balance between the three directions of the grid and the time step will also help. It is not clear why the thin-airfoil or thin-plate problem appeared under good control, at several angles of attack, already with only about 2 × 105 points [18]. In contrast to these cases, the separation off the smooth surface of the cylinder, a textbook case well-known to strongly depend on transition, tests CFD approaches and codes in many areas. At Reynolds numbers that produce laminar separation (LS), DES is not very different from LES, except that a simple LES method is not equipped to disable the SGS model, as must be done in the boundary layers. A DES based on the S-A model functions quite well in “tripless” mode, and the model 34 P.R. Spalart and K.D. Squires Fig. 1. Pressure distribution on circular cylinder. Left, laminar separation; right, turbulent separation. Left: ◦, #, exp.; - - -, —, – – –, DES with improving resolution. Right: same lines, and - – - RC correction. is indeed disabled up to separation without the user imposing a transition line [19]. In the régime of turbulent separation (TS), the usual cost increase of LES rapidly outruns the capacity of any computer today, and serious attempts must use a hybrid method. The study of Travin et al used DES in its standard form, with the user only specifying whether the boundary layers would be laminar or turbulent ahead of separation [19]. The study included variations in the spanwise periodicity length, and grid refinement by a factor of 2 in all directions. The finest grid had about 106 points, which is moderate by current standards. Figure 1 suggests both real progress, and room for improvement. The LS results indicate grid convergence (which is elusive in methods containing LES) at least for the pressure distributions: the three curves approach the experimental results, which are themselves in excellent agreement. Admittedly, even that case showed much scatter for velocity profiles and Reynolds stresses in the wake. The TS cases have scatter even in the most basic of result: the pressure. The DES results, which are quite consistent on different grids and with(out) RC, fall between two experiments which both appear reliable, but nevertheless are far apart. Therefore, the cylinder with Reynolds number past 106 remains an excellent candidate for experiments, with special care to improve and document two-dimensionality. It would facilitate CFD validation to include cases with trips well upstream of the separation line. This is because skin-friction distributions shown in [19] reveal that making the boundary layers turbulent ahead of separation is simplistic, relative to the true transition process on a smooth surface, even at Reynolds number as high as 3.6 × 106 . Separation and transition are concurrent, which RANS models (at least, S-A) are unable to render. In its tripless mode, S-A produces laminar separation, at any Reynolds number. Unfortunately, the next level of fidelity in numerical simulation appears to involve a DNS of the transition, presumably with DES for Bluff Bodies 35 realistic imperfections of both the surface and the incoming flow. Whether differences in these imperfections were sufficient to cause the differences in experimental pressures is an intriguing conjecture. Travin et al also found that very long time samples are essential to converge the statistics, as the vortex shedding has strong modulations in DES, just as occurs in the experiment [20]. Although this could be a “pathology” of 2D-geometry separated flows, it is a warning for any study of a flow with large-scale shedding: simulating only a few cycles of such shedding is unsafe. Constantinescu & Squires presented the equivalent study for a sphere [22]. 0.008 Measurements DES - Fine Grid DES - Medium Grid DES - Coarse Grid RANS a = 20o x/L = 0.77 0.006 Cf 0.004 0.002 0 0 30 60 90 f 120 150 180 Fig. 2. Skin-friction distribution around a prolate spheroid. The prolate spheroid at angle of attack provides an opportunity for assessing turbulence treatments in a flow exhibiting complex three-dimensional separation. Analogous to the circular cylinder, separation is not fixed by a geometric feature and challenges predictive models. Unlike other simple objects such as cylinders and spheres, however, the flow structure in the leeward/wake region is strongly influenced by a pair of longitudinal vortices. A proto-typical example is the 6:1 prolate spheroid for which there are extensive experimental measurements of surface quantities such as the pressure and skin friction distributions as well as profiles of the mean velocity and second-order statistics [21]. A prediction of the azimuthal distribution of the skin friction magnitude is shown in Figure 2. In the figure, φ = 0◦ defines the windward coordinate of the symmetry plane, and φ = 180◦ coincides with 36 P.R. Spalart and K.D. Squires leeward coordinate of the symmetry plane. The distributions shown are in the aft region, at x/L = 0.77 for which measurements show well-developed primary and secondary separation. The computations are for a freestream at 20 degrees angle of attack and at a Reynolds number of 4.2 × 106 (based on the freestream speed and spheroid length, L). The flow parameters of the computation match the experimental measurements reported by [21], including a boundary layer trip at x/L = 0.2 which is activated in the computations using the trip terms of the S-A model. DES predictions on three grids are shown together with a S-A RANS result. Experiments on the spheroid have shown that minima in Cf are well correlated with the separation locations indicated by wall streamlines, the measured skin friction then indicating primary separation at φ ≈ 115◦ and secondary separation at φ ≈ 145◦ . The S-A RANS result predicts primary separation at a slightly more leeward location. Figure 2 shows that the minimum in Cf is around 125◦ and that the magnitude is slightly greater than the measured minimum. The variation in Cf around 145◦ in the RANS prediction is indicative of the influence of a secondary separation, though its influence is very weak and an outcome of the S-A model devoid of rotation correction, with its large eddy viscosity in the core of the vortices, overly diffusing these structures. For the DES, with grid refinement the skin friction magnitude shows an increasingly well-defined secondary separation, as evidenced by the Cf distribution around φ = 145◦. Increases in grid resolution results in lower eddy viscosity, an effect that is similar to that which could be obtained using a RANS model with R/C corrections. Nevertheless, the more sharply defined separated structures, in this case the coherent longitudinal vortices, experience less diffusion with increases in mesh resolution, in turn resulting in pronounced signatures in the skin friction and (not shown here) surface pressures. Figure 2 also shows that the influence of grid resolution on the minima corresponding to primary separation is not weak. On progressively finer grids the minimum shifts windward and the magnitude decreases. For the unstructured grids used for the DES predictions shown in the figure, the RANS-LES interface is within the boundary layer upstream of separation. As discussed in §1, this could lower the total Reynolds stress and shift the separation location “upstream” (in this case, towards the windward direction). This is under intense investigation. 3 Components The distinction between “simple objects” and “vehicle components” can be blurry. Forsythe, Hoffmann and Dieteker simulated a circular base flow at Mach 2.46 [23] with the Cobalt code, second-order upwind on unstructured grids. The DES results were far superior to RANS results, even qualitatively, and quite close to the experiment. Simulations were run with various values DES for Bluff Bodies 37 of the CDES adjustable constant. Even simulations without any turbulence model worked quite well, suggesting that the numerical stabilization of the simulation comes close to playing the role of an SGS model away from walls (so that low values of CDES have little effect); however, its boundary-layer velocity profiles were incorrect, confirming that such methods are inadequate when the boundary layers need to be reproduced accurately. Deck, Garnier and Guillen simulated more complex geometries, namely an under-expanded rocket nozzle and an after-body with conical base and emerging nozzle with jet [24]. The nozzle flow DES exceeds Mach 5 at the Mach disk, sustains three-dimensional flow structures, and is in excellent agreement with experiment both on the separation location and the post-shock pressures. The afterbody study is directed at buffeting. Reconciling shock-capturing and LES content with a numerical scheme is a challenge. The FLU3M code of ONERA uses structured grids and a second-order upwind scheme. In this flow as in the nozzles, RANS based on the S-A model reaches steady state. Here, RANS and DES give rather different mean flows, particularly in terms of reattachment location, and the experimental result appears to be in-between the two. The three-dimensional unsteady activity is obvious. The unsteady forces are shown, but not compared with experimental measurements, which may well be proprietary. This study comes very close to flow phenomena of extreme industrial importance, considering recent failures of space launchers. Fig. 3. Vorticity contours in six axial planes along the leeward side of the GTS (10◦ yaw). Surface colored by pressure. 38 P.R. Spalart and K.D. Squires The Ground Transportation System tested by NASA is classified as a component, because its geometry is very simplified. In return, very detailed measurements are available, at several conditions, and allow a thorough examination of CFD results [25]. Vorticity contours at six axial stations along the leeward side of the GTS are shown in Figure 3 from DES predictions of the flow at 10◦ yaw. The findings are that DES is justified over RANS already for mean quantities, since the drag error is 12% instead of 49% without sidewind, and of course even more if unsteady information is needed. DES can be clearly faulted only for the size of the separation region near the front end with side-wind, which is much too large, although other aspects of that solution are good, including the skin friction under the roof vortex, for instance. The drag error jumps from 12% to 39%, which is far from industrial accuracy; in other words, CFD is not a practical tool yet. This problem may eventually be traced to a difference in the laminar/turbulent state of the boundary layer, and suggest that the corner radius chosen is unfortunate since it challenges the RANS region and transition prediction so much (another putative symptom is the hysteresis versus Reynolds number in the test). In that case, actual geometries which are less rounded could be easier from a flow-physics point of view, although much harder to grid. Another conclusion is that grid generation on such a geometry is onerous even with an unstructured-grid code, and can always be re-visited to improve accuracy and reduce waste. This is intensified by the desire to compare at least two grids and make the refinement strong enough to be meaningful, as well as systematic enough to feel that the error is reduced everywhere in the domain. The case with boat-tail plates, designed to reduce drag, has not been calculated yet, and the Reynolds number was kept out of the hysteresis range. Thus, much more work could be done. The DES study of Active Flow Control (AFC) on the airfoil of the V-22 tiltrotor aircraft was partly successful [26]. The flow is driven by the downwash of the rotors in hover, leading to an airfoil flow at roughly −90◦ angle of attack, with a highly-deflected flap. The AFC relies on alternating suction and blowing through a narrow slot at the flap shoulder, designed to enhance mixing and make the flow more nearly follow the flap. With the AFC off, accurate predictions could be expected, similar to those on the NACA 0012 airfoil [18]. Initial results with the RANS model active in the boundary layers, leading to turbulent separation, were disappointing in terms of drag and pressure pattern at the leading edge. The leading edge is much more rounded than on the 12%-thick airfoil, allowing the separation line more freedom. Indeed, simulations with the model inactive in the boundary layers, and therefore laminar separation, were within experimental error. This flow is sensitive to transition and an internal controversy with the authors of the experiment, who had tripped their boundary layers, was unfortunately never resolved [27]. However, arguments were made to the effect that the trips failed because of Reynolds number and acceleration [26]. This case illustrated the strong DES for Bluff Bodies 39 residual influence of the model, and the value of being able to routinely control transition in CFD as provided by the S-A model. Active Flow Control was a new arena, and proved highly challenging. The slot was so narrow that it covered only two to three grid points, even with very strong clustering. Thus, the slot treatment was crude. With a grid of the order of 600,000 points, the crucial region containing the manipulated separated shear layer was treated in URANS mode inside the DES; for an LES treatment, orders of magnitude more grid points would be needed. Thus the shear-layer treatment fell back on the RANS model; no data were available to validate the model in such a flow, and the accessible grid refinement would have been inconclusive. The model may not matter to leading order, since the roll-up of the shear layer is nearly inviscid, but this is not proven. For the rest of the wake, the level of confidence was fairly good, based on the agreement with AFC off. The pressure distribution responded to AFC, but only qualitatively. The drag reduction was not very consistent with experiment, and in some ranges, increasing the level of forcing caused an increase in the predicted drag. The time samples were adequate, but not all were long enough to rule out hysteresis or very slow modulations. Repeating the study with larger computer resources would close some of these issues. However, the very nature of AFC creates CFD problems containing a huge range of scales (here, from the slot width at 0.2% of chord to the wake length at 100 chords), which are barely possible in three dimensions even with thorough grid design. Turbulence is the realm of wide ranges of scales, but the premise of LES is that the small eddies only absorb information from the large eddies; here, phenomena in the tiny slot control the entire flow. As a result, CFD will lag experiments for years in the field of AFC for lack of CPU power, provided the experiments are done with care and attention to scale effects. Other component flows are the simplified landing-gear truck of Hedges et al. [28] and the jet-fighter forebody of Squires et al. [29]. 4 Full Configurations The series of DES over the F-15 and F-16 fighter aircraft has been the most noticed work on quite complete configurations [31] (although the engine modeling remains very simple). In particular, agreement with experiment within 5% for lift and drag at 65◦ angle of attack is an excellent result, even once it is recognized that the extreme angle of attack and thin wing edges mean that the DES depended almost only on its LES mode, except for the nose of the airplane. The forebody “component” study [29] gives confidence and was very favorable to DES over RANS, but accommodating a grid and a time step capable of LES behavior on the nose while including the entire aircraft remains very challenging. 40 P.R. Spalart and K.D. Squires Today’s super-computers are capable of DES on a smooth full configuration; the equivalent simulation on an airliner may suffer as much from the uncertainty over the shape of the wing, which is much more flexible, as it does from CFD weaknesses. All simulations would also be more difficult closer to the stall angle of various components, especially with more rounded leading edges, because separation prediction would have more leverage. Therefore, a long validation process needs to take place. However, there is no reason CFD should shy away from problems such as airplane spin, which is already being addressed [32] or the possibility of “tumbling” for a blended-wing-body airplane. In terms of fluid mechanics, it is not clear that they are more difficult than the circular cylinder. Fig. 4. Truck simulation of Wurtzler. Vorticity surface and wall pressure. The tractor-trailer truck simulated by Wurtzler with the Cobalt unstructuredgrid code is rather complete, but does not correspond to a geometry that was tested [33]. In Fig. 4, note the presence of wheels and mirrors, the gap between the cab and trailer, and the side-wind. The grid had about six million points. Wheel rotation and radiator flow will be added sooner or later, as will even smaller features such as shafts and brakes, as well as surface roughness on the trailer sides and tires. The vorticity reveals convincing LES content in this solution, and a simulation of the buffeting effect on a car appears within reach, as do noise calculations for low frequencies, or calculations of soiling. DES for Bluff Bodies 41 Fine effects such as drag reduction by detail shape modifications have not been demonstrated yet. 5 Algorithm Issues The application of eddy-resolving techniques to the prediction of turbulent flows places high demands on the numerical approaches used in DES (as well as LES). At full-scale Reynolds numbers and when applied to complex configurations, the discretized system of equations is extremely stiff and requires the application of implicit schemes for efficient integration of the governing equations. Since many production codes in use today have been developed for very efficient integration to steady-state, the extension to time-accurate computation is obviously an important step for these codes in order to perform DES. In addition, in the absence of kinetic-energy conservation by the numerics, discretizations of the Navier-Stokes equations require some form of artificial dissipation to maintain stability. Two common approaches are the use of upwind-biased differences and the use of limiting. Strelets, for example, employs fifth-order accurate upwinding on convection in their numerical approach to solution of the incompressible Navier-Stokes equations [5]. An interesting aspect of that method being the application of upwind-biased differences only within the RANS region and use of centered difference approximations in the LES region. A reasonably wide range of DES predictions have also been obtained using Cobalt, a cell-centered finite volume approach applicable to arbitrary cell topologies (e.g, hexahedrons, prisms, tetrahedrons) [30]. There, the stability to the underlying numerical approach is established using TVD flux limiters. Regardless the details of the approach, any scheme that requires the introduction of artificial dissipation in order to maintain stability should be carefully assessed when used in DES. Dissipation from the numerical discretizations are often comparable to that provided by the turbulence model. Even centered schemes, that do not introduce artificial dissipation, often suffer from strong dispersive error, an effect that can require great care in controlling aspects such as the grid stretching. The primary approach to assessing these effects remains variation in the grid density (and time step). Unsteady content with sufficient statistical sampling increases the computational cost of DES. Obtaining predictions on more than a single grid further raises the cost, though such exercises have been invaluable in understanding the method and contributing to its experience base [19]. As the range of flows amenable to accurate prediction using DES continues to expand, parallel computation will represent an even more important tool. 42 P.R. Spalart and K.D. Squires 6 Design of a DES The basis of DES is that the relationship between the grid spacing and the natural length scales of the turbulence in a given region makes the selection between RANS and LES behavior [19]. Here, we are assuming that the time step is short enough to allow LES behavior; since the time step is global to the simulation, its value can present a difficult compromise. As a result of this option, and considering the permanent need for economy of grid points, DES grid design is not simple. The “young person’s guide” (YPG) [16] introduces terminology and guidelines, many of which also apply to RANS calculations, even if they have not been named. Focusing on external flows, the YPG distinguishes the Euler Region, into which no turbulence will intrude, the LES Region, and the RANS region. The latter two also contain viscous layers at the walls. The wall regions resemble those in RANS: shallow cells with the usual rules for first wall-normal spacing or “y + ” and stretching ratio. In contrast, the LES and Euler regions have isotropic cells, and the LES region little stretching. There is also necessarily a “Departure Region” in which eddies that will never return into the LES region and impinge on the body safely become dissipated. Grid refinement tends to concern the LES region and the wall-parallel spacings of the wall region, which tend to follow the LES-region spacing. For the wall-normal distribution, there is little point in starting with y + = 10 or a stretching ratio of 2 (as compared with the guidelines y + ≈ 1 − 2 and ratio ≈ 1.2 − 1.3), say, unless this is explicitly a disposable simulation used to prime an automatic grid adaptation (it would make much more sense to do a precursor simulation at a reduced Reynolds number than with an excessive y + ). The Euler region does not contain a large share of the points, giving little incentive to save points and have to re-visit it. The LES region leaves the most leeway, as it is very difficult to predict how many points are needed to be accurate in a new case. Grid convergence is very elusive, and the order of convergence is not simple at all. Only the circular cylinder has strongly suggested grid convergence [19]. In addition, reaching a good accuracy level can well happen at different levels of resolution in different parts of the flow. The smaller features of the geometry require finer resolution, which is not a natural tendency when generating the LES-region grid; in addition, again, the time step is uniform. There are clear conflicts. The recommendation is to count many weeks of work for any new case, several cases to form a new DES user, and to pool experience both by detailed and critical publications and within the networks of the CFD vendors. 7 Closing comments For treating bluff bodies at useful Reynolds numbers, the consensus behind hybrid RANS-LES methods has grown very strong, and DES is at present the DES for Bluff Bodies 43 most recognized of such methods. It has been stable and has active communities outside the original core, particularly in Germany and France, so that meaningful critiques have been made (as have a few mistakes, such as grid refinement that is not consistent in the three directions). The users have been generally quite satisfied, while recognizing the heavy challenge of designing a DES. However, the challenge is no surprise to those familiar with LES, with the possible exception of the issues of corrupting the eddy viscosity in a RANS boundary layer or accidentally approximating the turbulence depletion by rotation. Abuses have been committed, typically leading to essentially RANS behavior because of a very insufficient number of grid points; no LES can develop with 10 points in any of the directions. On a related matter, some users expect DES to require less resolution than LES everywhere, but this is true only in the boundary layers. For a region of massive separation, the size of the numerical task is dictated by a “number of large eddies” which is no different between an LES and a DES. The recent dissemination in vendor CFD codes is welcome, but will lead to much more use by non-experts. To help them, it is desirable for many detailed publications to appear, and again for the approach to remain stable, simple, and clearly defined; they are urged to visualize their solutions extensively, and to produce at least two grids. The warnings made in this paper over the design and interpretation of a DES, from the simplest to the most complex geometries, make it clear that it is not a “push-button” technique; DES requires a commitment to numerical quality, and a working knowledge of turbulence. However, the wait for a pushbutton technique will be very lengthy. Many of the warnings simply reflect the physics of this new class of flows, which is still widely considered to be out of reach of CFD. It is out of reach of casual CFD use. Competing methods do not appear simpler to implement or understand, and since all problems are three-dimensional, “over-kill” grid resolution is not about to become an option. Fortunately, we are seeing the beginning of grid adaptation, based on precursor solutions, which makes grid refinement more rapid and more systematic. 8 Acknowledgments Prof. Strelets made comments on the manuscript. References 1. Spalart PR, Jou WH, Strelets M, Allmaras SR (1997) Comments on the feasibility of LES for wings, and on a hybrid RANS/LES approach. 1st AFOSR Int. Conf. on DNS/LES, Aug. 4-8, 1997, Ruston, LA. In Advances in DNS/LES, C. Liu and Z. Liu Eds., Greyden Press, Columbus, OH, USA. 2. Spalart PR (2000) Strategies for turbulence modelling and simulations. Int. J. Heat Fluid Flow 21, pp. 252-263. 44 P.R. Spalart and K.D. Squires 3. Mellen CP, Frölich J, Rodi W (2002) Lessons from the European LESFOIL project on LES of flow around an airfoil. AIAA-2002-0111. 4. Mary I, Sagaut P (2002) Large-eddy simulation of flow around an airfoil near stall. AIAA J., 40, 1139-1145. 5. Strelets M (2001) Detached eddy simulation of massively separated flows. AIAA-2001-0879. 6. Nikitin NV, Nicoud F, Wasistho B, Squires KD, Spalart PR (2000) An Approach to Wall Modeling in Large-Eddy Simulations. Phys Fluids 12, pp. 7-10. 7. Caruelle B (2000) Simulation d’écoulements instationnaires turbulents en aérodynamique: application à la prédiction du phénomène de tremblement. CERFACS Report TH/CFD/00/50. 8. Deck S (2002) Personal communication. 9. Menter FR, Kuntz M, Durand L (2002) Adaptation of eddy viscosity turbulence models to unsteady separated flow behind vehicles. This volume. 10. Speziale CG (1998) Turbulence modeling for time-dependent RANS and VLES: a review. AIAA J. Vol. 36, No. 2, pp. 173-184. 11. Batten P, Goldberg U, Chakravarthy S (2000) Sub-grid turbulence modeling for unsteady flow with acoustic resonance. AIAA-2000-0473. 12. Wernz S, Fasel H (2000) Control of separation using wall jets– Numerical investigations using LES and RANS. AIAA-2000-2317. 13. Arunajatesan S, Sinha N, Menon S (2000) Towards hybrid LES-RANS computations of cavity flowfields. AIAA-2000-0401. 14. Menter FR, Kuntz M, Bender R (2003) A scale-adaptive simulation model for turbulent flow predictions. AIAA-2003-0767. 15. Shur M, Strelets M, Travin A, Spalart PR (2000) “Turbulence modeling in rotating and curved channels: assessing the Spalart-Shur term”. AIAA J. 38, 5, 784-792. 16. Spalart PR (2001) Young person’s guide to DetachedEddy Simulation grids. NASA CR-2001-211032. http://techreports.larc.nasa.gov/ltrs/PDF/2001/cr/NASA-2001-cr211032.pdf 17. Rodi W, Ferziger JH, Breuer M, Pourquié M (1997) “Status of large eddy simulation: results of a workshop”. J. Fluids Eng. 119, 248-262. 18. Shur M, Spalart PR, Strelets M, Travin A (1999) Detached-eddy simulation of an airfoil at high angle of attack. 4th Int. Symposium on Eng. Turb. Modelling and Experiments, May 24-26 1999, Corsica. W. Rodi and D. Laurence Eds., Elsevier, Amsterdam, NL. 19. Travin A, Shur M, Strelets M, Spalart PR (2000) Detached-Eddy Simulations past a Circular Cylinder. Flow, Turb. Comb. 63, pp. 293-313. 20. Cantwell B, Coles D (1983) An experimental study of entrainment and transport in the turbulent near wake of a circular cylinder. J. Fluid Mech., 136:321– 374. 21. Chesnakas CJ, Simpson RL (1997) Detailed investigation of the threedimensional separation about a 6:1 prolate spheroid. AIAA Journal, 35: 990999. 22. Constantinescu G, Squires KD (2000) LES and DES investigations of turbulent flow over a sphere. AIAA-2000-0540. 23. Forsythe J, Hoffmann K, Dieteker JF (2000) Detached-eddy simulation of a supersonic axisymmetric base flow with an unstructured flow solver, AIAA2000-2410. DES for Bluff Bodies 45 24. Deck S, Garnier E, Guillen P (2002) Turbulence modelling applied to space launcher configurations. J. Turbulence 3 (57), pp. 1-21. 25. Maddox S, Squires K, Wurtzler K, Forsythe J (2003) Detached-eddy simulation of the ground transportation system. This volume. 26. Spalart PR, Hedges LS, Shur M, Travin A (2003) Simulation of active flow control on a stalled airfoil. IUTAM Symp. Unsteady Separated Flows. To appear, Int. J. Flow, Turb. & Comb. 27. Kjellgren P, Andenberg N, Wygnanski I (2000) Download alleviation by periodic excitation on a typical tilt-rotor configuration – computation and experiment. AIAA-2000-2697. 28. Hedges LS, Travin A, Spalart PR (2002) Detached-eddy simulations over a simplified landing gear. J. Fluids Eng., 124, 2, 413-423. 29. Squires KD, Forsythe JR, Spalart PR (2002) Detached-Eddy Simulation of the separated flow around a forebody cross-section. Direct and Large-Eddy Simulation IV. 30. Strang WZ, Tomaro RF, Grismer MJ (1999) The defining methods of Cobalt60 : a parallel, implicit, unstructured Euler/Navier-Stokes flow solver. AIAA Paper 99-0786. 31. Forsythe JR, Squires KD, Wurtzler KE, Spalart PR (2002) Detached-eddy simulation of fighter aircraft at high alpha. AIAA-2002-0591. 32. Forsythe, JR, Wentzel JF, Squires KD, Wurtzler KE, Spalart PR (2003) Computation of prescribed spin for a rectangular wing and for the F-15E using Detached-Eddy Simulation. AIAA-2003-0839. 33. Wurtzler K (2003). Personal communication. 34. Travin A, Shur M, Strelets M, Spalart P R (2001) Physical and numerical upgrades in the detached-eddy simulation of complex turbulent flows. Euromech Coll. 412, Kluwer, Dordrecht, NL.