S Testing the SM-3 Kinetic Warhead in the Guidance System Evaluation Laboratory Scott A. Gearhart
advertisement

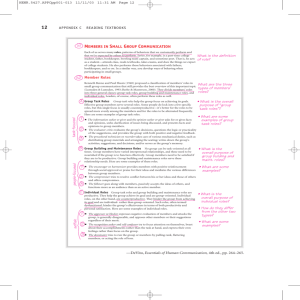
S. A. GEARHART Testing the SM-3 Kinetic Warhead in the Guidance System Evaluation Laboratory Scott A. Gearhart S tandard Missile-3 (SM-3) is being developed as part of the Navy’s Aegis Lightweight Exo-atmospheric Projectile Intercept Program, known as ALI, which is intended to demonstrate an Aegis ship engagement of a tactical ballistic missile test target in the exoatmosphere. As part of the Laboratory’s long-established role as SM Technical Direction Agent, we are conducting ground testing of key SM-3 components (flight computers, guidance systems, navigation systems, communication links, etc.) in APL’s Guidance System Evaluation Laboratory (GSEL). This article focuses on the GSEL testing of the kinetic warhead, the infrared-guided fourth stage of SM-3 that is ejected in the terminal phase of flight to acquire, track, and intercept the target. INTRODUCTION APL’s Guidance System Evaluation Laboratory (GSEL) is a test facility dedicated to long-term support of the Navy’s Standard Missile (SM) Program. Since the 1960s, the GSEL has performed guidance system testing for all SM variants. These tests have provided missile flight test risk reduction, postflight test assessment, rapid investigation of design and performance issues, and missile production screening. Because the GSEL uses personnel, test methods, and test equipment that are not tied to the contractor’s test program, the facility provides a complementary test capability and a second, independent assessment of design integrity and missile flight readiness. GSEL test capabilities are continually evolved to meet the needs of each new type of SM (see the article by Marcotte et al., this issue). SM-3 is the newest system being tested. This article focuses specifically on GSEL testing of the SM-3’s infrared (IR) guided kinetic warhead (KW). 302 The SM-3 KW is unique in several respects compared with other IR guided missiles tested in the GSEL. First, it is essentially a spacecraft whose IR seeker detects and tracks objects against cold space as opposed to terrestrial backgrounds. Second, the IR seeker has no gimbals but instead is hard-mounted to the KW body in a “strap-down” configuration. To search a region of interest, the entire KW body maneuvers to steer the IR seeker line of sight, resulting in tighter coupling between seeker and guidance functions. Third, the KW’s IR seeker operates in a wavelength regime different from other SM IR seekers, and also has a comparatively larger optical aperture, better sensitivity, and higher optical resolution. Finally, the KW carries no explosive warhead. Its destructive force relies on direct impact with the target at high speed, placing greater demands on guidance system responsiveness. Such a departure from previous systems required the development of new test JOHNS HOPKINS APL TECHNICAL DIGEST, VOLUME 22, NUMBER 3 (2001) TESTING THE SM-3 KW IN THE GSEL methods and equipment. This article presents an overview of the GSEL’s KW test program, including pertinent background discussions. ALI PROGRAM The objective of the Aegis Lightweight Exo-atmospheric Projectile (LEAP) Intercept (ALI) Program is to develop and demonstrate an enhancement to the Aegis Combat System that provides the capability to engage a nonseparating tactical ballistic missile test target in the exo-atmosphere (i.e., above about 100 km altitude). The ALI effort involves the development of new Aegis computer programs as well as the development of the SM-3 missile to perform the hit-to-kill target intercept. It includes a series of control test vehicle flights that began in mid-1999 to incrementally prove ALI system functions, culminating in a series of full-up system tests to begin in late 2001. A number of defense contractors are participating in the ALI Program including Lockheed Martin Government Electronics Systems, Raytheon Missile Systems, Boeing North America, and Thiokol. Figure 1 depicts the ALI mission sequence, which begins with the launch of the test target from the range. The shipboard Aegis SPY-1 radar acquires the target and establishes track, and the Weapons Control System issues a missile engagement order. The Vertical Launching System next provides electrical power to SM-3 and transmits prelaunch engagement data. The missile batteries are then activated, built-in tests are performed, and missile launch occurs. During the early phase of flight, the SPY-1 radar transmits guidance commands to the missile. Later, the missile derives its own guidance commands using uplinked SPY-1 target and position data. In the terminal phase of flight, the KW autonomously guides to the target using its IR seeker. SM-3 is a four-stage missile. Stages 1 and 2 include rocket boosters and the steering control system necessary for achieving exo-atmospheric altitudes. Each motor is separated from the upper stages after burnout. In addition to the third-stage rocket motor, Stage 3 contains guidance, control, and navigation systems, the communication link to the Aegis ship, and the nosecone which protects the fourth-stage KW during flyout. After Stage 3 rocket motor burnout and nosecone deployment, the KW is ejected. It then acquires the target with its IR seeker and guides to intercept using its guidance system and Solid-rocket Divert and Attitude Control System (SDACS) rocket motor. The combination of motors from Stages 1 to 3 provides the kinetic energy needed for the KW to destroy the target on impact. The KW’s SDACS provides lateral thrust maneuverability. Figure 2 illustrates the components of the KW. Exo-midcourse phase Seeker calibration KW ejection Third stage, second burn SM-3 launch Nosecone ejection GPS hot start (varies with scenario) Third stage, first burn Endo-midcourse phase Terminal phase Acquire, track, divert Schedule Engage Second stage Target burnout Detect SM-3 readiness checkout (prior to mission) Pacific Missile Range Facility Boost (acquire) Figure 1. ALI mission sequence. JOHNS HOPKINS APL TECHNICAL DIGEST, VOLUME 22, NUMBER 3 (2001) 303 S. A. GEARHART SDACS IR seeker Ejector assembly Guidance assembly Lateral divert Figure 2. The SM-3 KW. KW TEST CONSIDERATIONS The elements of the GSEL KW test program and requirements for new test capabilities were dictated by the KW’s mission, functions, and operating environment. Some considerations that are unique to the KW as compared to other IR guidance systems are discussed in the following sections. Coupled Seeker and Guidance Functions Typically in testing IR guidance systems it is common to delineate tests into groups partitioned by component or function (e.g., seeker functions, guidance functions, etc.). Structuring tests in this manner assumes that certain functions can be treated as independent, i.e., not coupled. Not having to simultaneously test certain seeker and guidance functions makes the test setup for each functional group less complex and the test process more efficient. Once the tests are completed, a comparatively smaller number of more complex systemlevel tests is conducted to assess any known or unknown interactions among functional groups. KW testing also partitions into convenient test groups; however, the coupling between seeker and guidance unit functions is greater than in past experience, and more frequent and extensive system-level tests are required. Coupling among component functions is due largely to the KW’s strap-down IR seeker design, which requires the IR seeker line of sight to be steered by controlling the KW’s body orientation. In other SM IR seeker designs, the seeker mounts on an inertialstabilized platform intended to keep the line of sight unperturbed by missile body motion. Although these other applications need to assess subtle body motion coupling effects onto the seeker platform, the seeker, for many tests, can be assessed independently of the 304 guidance system. This simplification is less valid for the KW’s IR seeker. The tighter coupling of KW seeker and guidance unit functions is apparent in the track function. To maintain track on a target image that moves continuously with KW body motion, the guidance unit measures body motion and feeds these data to the IR seeker, which propagates the track gate position (the window of focalplane-array pixels within which the target must remain to maintain valid track) from one frame to the next. Thus, the appropriate stimuli must be provided to both the IR seeker and the guidance unit to fully test the track function. Space Background At the operational altitude of the KW, the IR seeker views a cold space background having low radiance. Consequently, IR radiant emissions and reflections from its own internal components dominate the seeker’s detected background level, which equates to an apparent background temperature of about 210 K (–63°C). From a practical standpoint, this background temperature is well below laboratory ambient room temperature; hence, a method to simulate cold backgrounds is required for some types of tests. The most accurate method for simulating a cold space background necessitates the use of a cryogenic vacuum chamber, often with the seeker enclosed in the chamber and inaccessible should a system failure occur. This approach requires expensive equipment, increases the risk to high-value test assets, and entails extensive periods for integration and checkout. Fortunately, only a few types of tests require a cold background; the majority of KW tests can be performed in the ambient laboratory environment. Moreover, since high seeker radiometric accuracy and sensitivity are not needed in the ALI mission, simpler and less risky methods can be used to simulate a cold background (albeit not as cold as could be achieved in a space chamber). The apparatus developed in the GSEL to superimpose a test target onto a cold background is described later in this article. In the future, as the ALI System evolves to a tactical system, some level of cryogenic vacuum chamber testing may be required. Hit-to-Kill Target Intercept In the testing of earlier SM variants, the shape of the laboratory IR test target and its radiance distribution were of minimal importance. Indeed, simple expanding apertures back-illuminated by a hot source were adequate to emulate target image growth as range decreased, because target structure in a real engagement would not be discernible until just before intercept. Even if IR seeker tracking errors occurred owing to hot parts on the target structure, the guidance system would already JOHNS HOPKINS APL TECHNICAL DIGEST, VOLUME 22, NUMBER 3 (2001) TESTING THE SM-3 KW IN THE GSEL be commanding maximum acceleration and hence could not respond to these track anomalies. This is not necessarily true for the KW. Physically striking a point on the target body requires a highly responsive guidance system that is sensitive to target image shape and radiance distribution just before impact. This consideration prompts the need for more sophisticated and expensive IR target projection devices for a subset of tests. GSEL APROACH FOR KW TESTING A KW unit under test in the GSEL is shown in Fig. 3 mounted in a fixture on an optical table. Although a real SDACS is not tested for safety reasons, its effects are modeled in the KW hardware-in-the-loop (HIL) simulation described later. As Fig. 3 shows, the KW requires an ensemble of support equipment for activation and initialization as well as video and telemetry data collection. The KW control console developed by Boeing emulates power, ordnance, and communications interfaces between the KW and Stage 3 prior to KW ejection. This console provides the capability to execute user-specified simulated mission sequences from SM-3 launch to target intercept, and to vary the contents of KW state initialization messages. It also emulates KW battery power and provides other support functions such as utilities for downloading special test software and new versions of flight computer programs. The KW telemetry console, also developed by Boeing, allows monitoring, collection, and analysis of KW telemetry. Similarly, the DAS 2000 developed by Raytheon provides the capability to collect and analyze video from the KW IR sensor. Without this ensemble of support assets, testing of the KW would be impossible or at best greatly limited. KW telemetry control KW control console (Stage 3 emulator) Telemetry DAS 2000 Power Initialization data Ordnance activation Flight computer programs IR seeker video KW SDACS load emulator Compressed nitrogen Vortex cooler Vacuum pump Figure 3. The KW unit-under-test configuration in the GSEL, showing test support equipment. JOHNS HOPKINS APL TECHNICAL DIGEST, VOLUME 22, NUMBER 3 (2001) Consistent with established practice in the GSEL, evaluation of the KW progresses from tests of selected low-level functions to more complicated system-level tests. In this context, low-level functions are basic operations that are either prerequisite to or fundamentally inherent to the execution of high-level mission functions. Once the selected set of low-level functions is confirmed, tests of mission functions are conducted by iteratively traversing through increasingly larger portions of the ALI mission timeline in simulated flight sequences, culminating in full-up HIL simulations from missile launch to target intercept. Table 1 provides examples of IR seeker and guidance unit low-level functions tested during initial KW checkout and lists the associated ALI mission function sequence. This incremental approach, progressing from simple to more complex tests, has been shown from our experience to build fundamental knowledge and intuition that is essential to recognizing and isolating anomalies observed in the later more complex test configurations. Results from early tests are also used to develop and validate models used in digital simulations. Digital simulation results provide a key primer to interpreting the results of more complex system-level tests like HIL simulation. Equipment to test the KW varies in complexity from simple IR collimators and blackbody sources, to point target generators, to complex IR scene projectors and HIL simulations. The GSEL test equipment is either developed in house or built to GSEL-specific requirements by outside vendors. Test equipment typically is designed to provide modularity and flexibility, assuming that it will later need to be reconfigured or augmented to address new test needs. In general, it is not possible to foresee all equipment needs at the start of a test program; a test requirement may be discovered only after test experience with the KW is attained. As a rule, the criterion for choosing a particular test equipment configuration is to select the one that provides the highest-fidelity representation of the flight environment attributes important to the specific component or function being tested. For example, a simple collimator with a moving pinhole target more accur- ately represents a distant moving IR target for detailed acquisition and track studies than a complex resistor-array IR scene projector that might exhibit spatial anomalies associated with its discrete pixels. Conversely, the latter device is more appropriate for testing IR seeker processor loading while tracking multiple objects or testing endgame track performance when the seeker views details of the target shape. Experience suggests that building a single piece of test apparatus that suits all test needs is impractical; thus, a collection of different test assets is required. The five primary KW test configurations in the GSEL (Table 1) are as follows: 305 S. A. GEARHART Table 1. KW testing in the GSEL. Low-level functions tested during KW checkout Seeker Imaging Sensing Noise Guidance unit Initialization State propagation Attitude processing Inertial stabilization 1 Flood ilumination ALI mission-level function sequence Pre-eject 1. Activate 2. Cool down focal plane array 3. Receive/process time sync 4. Transfer alignment 5. Initialize 6. Calibrate in flight 7. Activate battery Post-eject 8. Eject 9. Ignite SDACS sustain 10. Navigate 11. Control 12. Search 13. Acquire target 14. Select target 15. Track target 16. Ignite SDACS divert 17. Guide to target 18. Select aimpoint 19. Track extended track 20. Hit target 21. Assess mission success aTest GSEL test configurationsa 2 3 4 Point Rate KW/Stage 3 target table connect X X X X X X X X X X X Limited testing X X X X X Emulated: real battery not tested X X Ejector not tested Emulated: real SDACS not tested X X X X X X X Emulated: real SDACS not tested 5 HILb X X X X X X X X X X X X X X X X X configurations are detailed in the text. with and without the KW connected to Stage 3. bPerformed 1. Flood illumination 2. Point target on ambient or cold background 3. KW on rate table viewing point target 4. KW connected to Stage 3 avionics 5. HIL Configuration 1 uses a cryogenic, temperature-controlled, extended-area blackbody source that is placed directly in front of the KW to characterize sensor performance. Configuration 2 is an APL-developed point target generator incorporating a novel approach that superimposes the target on a cold background, well below ambient room temperature, without employing a space vacuum chamber or cooled optics. The KW 306 typically mounts on a mechanized platform that nu- tates the KW body analogous to flight. In Configuration 3, the KW is attached to a precision single-axis rate table for characterizing body motion coupling into the KW’s reported target positions and rates. During these tests, the KW tracks a point target generated with the apparatus of Configuration 2. Configuration 4 links the KW to the Stage 3 avionics (being tested elsewhere in the GSEL) to confirm this critical interface. (During most other KW tests in the GSEL, the KW control console emulates the Stage 3 interface.) Finally, Configuration 5 is a HIL simulation that includes a resistor-array IR scene projector capable of projecting complex and dynamic IR JOHNS HOPKINS APL TECHNICAL DIGEST, VOLUME 22, NUMBER 3 (2001) TESTING THE SM-3 KW IN THE GSEL scenes. The unique test apparatus used in these test configurations is discussed in the next section. Simple equipment configurations are used in the early tests partly for expedience, since the intent is to provide a quick assessment of basic operations before proceeding with more complicated tests. Also, in some cases, the simple test configuration provides the best fidelity for the low-level function tested. In addition, some functions are assessed in more than one test configuration. For example, mission functions in Table 1 such as “acquire target,” “select target,” and “track target” are tested both in Configuration 2, which provides a higher-fidelity point target representation, and in Configuration 5, which provides a test of “end-toend” functional continuity. UNIQUE TEST CAPABILITIES As driven by considerations discussed previously, testing of the KW required upgrades to the GSEL’s test capability. This section describes some specifics on the more unique and innovative upgrades. Cold Background Point Target Generator Figure 4 is a diagram of the cold background point target generator devised by GSEL engineers. The KW seeker views into an enclosure whose interior is reflective. As shown in the figure, a highly reflective beamsplitter (a partially reflecting mirror) mounted in the enclosure reflects cold blackbody radiation from a cryogenically cooled plate into the KW seeker aperture. Since the enclosure is reflective, wall blackbody emissions into the KW are low. Furthermore, ambient room temperature radiation that would normally enter from outside the enclosure is reflected away by the beamsplitter which acts as a radiation seal. In this way, the KW effectively views a background temperature well below ambient room temperature without employing a space vacuum chamber or cooled optics. Point target radiation generated outside the enclosure enters through the beamsplitter, which, though mostly reflective, does transmit about 5%. (The intensity of the test target is increased to compensate for the low beamsplitter transmission.) The test target assembly comprises a smooth gold-coated plate that contains a small hole back-illuminated by the target blackbody source. As Fig. 4 shows, a second large-area cryogenic source reflects from the gold face into the KW seeker’s field of view to further emulate a cold background surrounding the target. The target assembly also includes an APL-designed collimating lens, a motorized target intensity attenuator, and a motion stage to provide one axis of target motion. To prevent frosting and misting of the cold air near the cryogenic source, the entire apparatus is enclosed in a Plexiglas box purged with nitrogen. Measurements show that a moving point target can be superimposed on a background-equivalent blackbody temperature of about 182 K (–91°C), compared to ambient room temperature, which is about 293 K (20°C). Although better performance would be achievable using an optical suite in a cryogenically cooled vacuum chamber, the approach described here is adequate for many types of tests at relatively low cost and risk to the KW. In addition, the apparatus requires little setup and can be used on a day-to-day basis. IR Scene Projection System The IR scene projection system used in the GSEL has two components: the Scene Generation Computing System (SGCS) developed by Matra/British Aerospace and the Thermal Picture Synthesizer (TPS), a resistorarray IR scene projector developed by British Aerospace Sowerby Research Center. Capabilities for dynamic IR scene projection are possessed by only a few other organizations worldwide. The SGCS renders multiple IR objects on a background and proTarget intensity Motion Nitrogen-purged duces a corresponding digital image attenuator stage box that provides the input to the TPS. Object models are files containing Cryogenic vertex coordinates that define the sources Gold target Enclosure object surface facets and the temHighly reflective plate with reflective beamsplitter perature of those vertices. For a interior Target commanded viewing geometry, the radiation SGCS transforms the view of object facets into the observer’s (i.e., the KW IR seeker’s) field of view and computes the apparent temperatures of each facet, including the effects Cold background Collimating Ambient radiation of blackbody emission, solar and radiation lens rejected Earth reflections, and atmospheric Figure 4. Cold background point target generator concept. attenuation (if needed). The scene JOHNS HOPKINS APL TECHNICAL DIGEST, VOLUME 22, NUMBER 3 (2001) 307 S. A. GEARHART is next converted to a 10-bit graylevel digital image and output to the TPS in a video line-by-line format starting at the center of the display and progressing outward. The SGCS is synchronized to operate at the frame rate of the IR seeker under test. It can render up to 350 facets in the scene at up to a 120-Hz frame rate. The SGCS total data latency, from scene geometry command input to digital image output, is about 17 ms. Thermal The TPS includes drive elecpicture synthesizer tronics, water cooling and argon gas (IR display) handling systems, and the display unit. The display has 256 256 pixels, which are vacuum-sealed behind an IR transmissive window. The architecture of each pixel is a serpentine heating coil (akin to a heating element on an electric range stove) that is suspended for thermal isolation above the lowerlayer address circuitry by small posts. The TPS is calibrated to radiate up to an equivalent blackbody temperature of 473 K (200°C), at frame rates of up to 120 Hz. Its addressing architecture uses 256 digital-to-analog converters to update each video line. The entire display can be updated in 6 ms. KW HIL Simulation The KW HIL simulation (Fig. 5) is an ensemble of computers and emulators intended to provide a virtual flight environment to the KW. Core to the HIL simulation is a flight dynamics simulator that processes body motion commands from the KW guidance system, computes the SDACS propulsion and body motion response, and relays this information to emulators that provide stimuli back to the KW, thereby closing control and guidance loops. One emulator in the HIL simulation is the inertial measurement unit (IMU) that provides body motion measurements to the KW analogous to its own IMU (which is disconnected from the guidance unit during HIL testing). The second emulator is the IR scene projection system that provides dynamic IR scenes to the KW’s IR seeker using the SGCS and TPS discussed previously. The motion of objects projected into the seeker’s field of view includes the combined effects of target and KW body motion. The KW HIL simulation is operated in either of two modes: open loop using scripted IMU emulator data and IR scene geometry inputs, or closed loop as already described. The open loop mode is useful for testing the 308 KW HIL simulation control computer SGCS Scene geometry and frame sync IMU emulator SDACS ignition signal Target dynamics Emulated IMU Sync and I/O SDACS propulsion IR scene loop IMU loop Flight dynamics simulator Sync signals Control and guidance commands Video and telemetry Optics KW KW control console (Stage 3 emulator) Figure 5. KW HIL simulation. IR seeker without the complexities of a closed loop test. In particular, parametric studies can be performed to assess the IR seeker’s response to varying KW body motion perturbations. The closed loop mode, although more complex, captures seeker and guidance unit interactions as well as real-time sensitivity to off-nominal propulsion conditions (e.g., stuck or leaking SDACS thruster valves). Challenges to developing the KW HIL simulation included tight synchronization of emulated data streams and the control and compensation of data latency. Here, data latency is the delay between the time that the KW guidance system issues a command and when the HIL emulators provide a response back to the KW. Because of the computations required, IR scene projection latency is the largest contributor. The effects of scene latency are compounded by the KW’s strap-down IR seeker configuration, since the target image moves with KW body motion. If uncompensated latency is large enough or the image motion perturbations severe, the target could be placed in the scene outside the seeker’s time-propagated track gate, causing loss of target track. Characterizing and compensating for data latency sources, and achieving precise synchronization of the HIL simulation elements, took many months of meticulous integration testing before successful closed loop simulation runs were demonstrated. JOHNS HOPKINS APL TECHNICAL DIGEST, VOLUME 22, NUMBER 3 (2001) TESTING THE SM-3 KW IN THE GSEL STATUS OF THE TEST PROGRAM APL received the KW and its support equipment from Raytheon and Boeing in late July 1999. After a period for integration and checkout, as well as training for APL personnel in KW and support equipment operations, testing began in the fall of 1999 with detailed characterization of the IR seeker low-level functions. Measurements of seeker imaging attributes like optical efficiency, distortion, and magnification were completed, as were measurements of sensor function parameters including responsivity, spectral response, temporal noise, and fixed pattern noise. Some of these fundamental measurements were repeated in April 2000 to quantify changes in seeker performance after a 5-month interval. Since the GSEL is the only facility testing a single KW over an extended period, measurements of time stability of the IR seeker’s original factory calibration and any degradation in the IR focal plane array over time are of key importance. After confirmation of the low-level seeker and guidance unit functions listed in Table 1, KW mission function testing began in preparation for two flight test rounds (1 and 1A). Since these flight exercises were aimed at testing SM-3 Stage 1 through 3 functions, operational requirements for the KW were minimal. Nevertheless, both flight rounds included a functional KW with an inert SDACS, and there was potential to collect KW telemetry data useful for risk reduction on future flight tests. Furthermore, FTR-1A included a test target identical to the one to be used for the later ALI intercept flights, and collection of KW seeker data was of great interest. Accordingly, open loop KW HIL tests were conducted to verify KW mission functions shown in Table 1 from activation through track target. In addition, GSEL testing was performed to assess a proposed modification to the FTR-1A mission that would delay ejection of the KW to provide a longer target viewing opportunity. Based partly on GSEL test data, the mission modification was adopted and was ultimately successful. Closed loop KW HIL test capability was demonstrated in November 2000, and tests are now being performed from KW activation through target intercept using the approach presented earlier of incrementally progressing through larger portions of the mission JOHNS HOPKINS APL TECHNICAL DIGEST, VOLUME 22, NUMBER 3 (2001) timeline. Timeline testing is being performed for a number of scenarios that include off-nominal conditions like multiple objects in the seeker field of view and potential missed-switching of the SDACS valves. As part of these tests, a connection has also been made between the KW and the SM-3 Stage 3 avionics suite tested elsewhere in the GSEL to verify the KW to Stage 3 interface. KW computer programs that will be used in the next SM-3 flight missile test, FM-2, were recently delivered to the GSEL. The FM-2 missile will include a fully functional KW, including a live SDACS rocket motor. GSEL risk reduction testing for FM-2 is under way. CONCLUSION KW testing in the GSEL will continue through the ALI test flights, with a later shift to the collection of test data pertinent to the development of more sophisticated SM-3 tactical variants. Planning is beginning now to ascertain what GSEL enhancements are required for the testing of these more advanced systems. The Navy SM sponsor relies on GSEL engineers and test activities to aid in missile development and flightreadiness decisions. The GSEL is a key element in fulfilling APL’s trusted agent role. It cannot be overemphasized that the GSEL’s credibility and value in this regard hinge on the continued hands-on experience of GSEL engineers working the practical problems involved in developing and testing real systems. ACKNOWLEDGMENTS: The author acknowledges the GSEL KW test and equipment development teams for their work and dedication to this effort: Christina Chomel, Laurel Funk, James Garcia, Michael Mattix, Todd Neighoff, Robert Patchan, Rick Tschiegg, Katy Vogel, and Duane Winters. In addition, the author acknowledges Terry Hipp (no longer at APL) who led early KW HIL development efforts. Thanks also to KW test and development teams at Raytheon Missile Systems, Tucson, AZ, and at Boeing, Canoga Park, CA, led by Mike Leal and Dan Tubbs, respectively, for their collective support. Special thanks to Hans Acosta (Raytheon), Phil Pagliara (Raytheon), Matt Ryan (Boeing), and Terry Sapp (Raytheon), who were our primary liaisons and made noteworthy efforts to ensure that our needs were met. Our appreciation also to Bill Baurer, Pat Buckley, Robin Lewis, and Brian Malone of Boeing who have been of great assistance in maintaining, augmenting, and troubleshooting KW support equipment on site. The author also acknowledges APL’s Bill Mehlman, who was key to getting the KW test effort started during his tenure as SM-3 Program Manager, and current APL Program Managers Tom Eubanks and Gary Sullins for their unwavering support and patience. Finally, our thanks to our NAVSEA PMS 422 sponsors CAPT C. M. Bourne and Clay Crapps for the opportunity to perform stimulating and relevant work. 309 S. A. GEARHART THE AUTHOR SCOTT A. GEARHART received a B.S. in engineering science from the Pennsylvania State University in 1982 and an M.S. in electrical engineering from the University of Maryland in 1987. He is a member of APL’s Principal Professional Staff and a section supervisor in ADSD’s Electro-Optical Systems Group. Mr. Gearhart joined APL in 1983 and has worked primarily on the development, test, and evaluation of optical and infrared guidance systems. He has led several efforts in APL’s GSEL to develop infrared system test capabilities in support of the Navy’s Standard Missile Program. Most recently, Mr. Gearhart led APL’s effort in developing capabilities for testing the Standard Missile-3 infrared-guided kinetic warhead. His e-mail address is scott.gearhart@jhuapl.edu. 310 JOHNS HOPKINS APL TECHNICAL DIGEST, VOLUME 22, NUMBER 3 (2001)