www.ijecs.in International Journal Of Engineering And Computer Science ISSN:2319-7242
advertisement

www.ijecs.in
International Journal Of Engineering And Computer Science ISSN:2319-7242
Volume - 3 Issue -7 July, 2014 Page No. .7388-7393
Routing and Sorting on OTIS-Hyper Hexa-Cell
Abdul Hannan Akhtar1, Keny T. Lucas2
1
Government Polytechnic,
Ranchi, Dist. Ranchi, Jharkhand, PIN – 834001, India
abdulhannan.akhtar@yahoo.com
2
Xavier Institute of Polytechnic and Technology,
Namkum, Dist. Ranchi, Jharkhand, PIN - 834010, India
kenny.lucas@gmail.com
Abstract: In the recent years, the Optical Transpose Interconnection System (OTIS) has attracted researchers for solving computational
and communicational intensive problems. OTIS is a hybrid interconnection network that exploits the advantages of electronic link as well as
optical links for connecting processors in the network. Many variants of OTIS model and several parallel algorithms for different problems
have been proposed on those models. In this paper, we have proposed shortest path routing and sparse enumeration sort on OTIS hyper
hexa-cell. In the sparse enumeration sort, the number of keys to be sorted is px, for some constant x≤½ and for our proposed algorithm x=2.
The proposed shortest path routing on OTIS-HHC is optimal as the number of steps required is equal to its diameter (2dh+3). The time
complexity of algorithm proposed for parallel sparse enumeration sort is 4(dh+1) electronic moves + 4 OTIS moves for case I and 4(dh+1)
electronic moves + 3 OTIS moves for case II.
Keywords: parallel algorithm, interconnection network, OTIS Hyper hexa-cell, routing, enumeration sort, time complexity.
1. Introduction
Optical Transpose Interconnection System (OTIS) has become
one of the most popular interconnection networks in the recent
year for developing parallel algorithm for solving computation
as well as communication intensive problems. An OTIS is a
hybrid interconnection Network that exploits electronic and
optical links for connecting processing nodes of a parallel
architecture [1], [2], [3]. The electronic links are used to
connect the processors that are in a range of few millimeters
and these processors can be fabricated within a chip. The free
space optical links are used to provide the connectivity between
the processors of different groups. In an OTIS model, the
processors are organized in groups. Each group within any
OTIS model contains equal number of processors and the
number of groups may or may not be equal to the number of
processors in each group. However, if the number of groups
and the number of processors in each group is same, then the
bandwidth of the OTIS systems can be maximized and the
power consumption can be minimized [4], [5], [6]. The
interconnection pattern of any OTIS model is decided by the
pattern of each group. If the interconnection pattern G is
implemented to connect the processors within the group, then
the overall architecture of the OTIS architecture is termed as
OTIS-G. In the recent years, many researchers have exploited
OTIS architecture to propose parallel algorithms for solving
scientific and engineering problems. A rich literature of work
on OTIS models and optical networks is available such as basic
operations [7], matrix multiplication [8], [9], BPC permutation
[10], sorting 11], [12], [13], [14], [15], [16] routing [11], [13],
image processing [17], conflict graph construction[18] load
balancing [19], [20], polynomial interpolation [21], polynomial
root finding [21], [22], prefix computation [23], gossiping [24,
25, 26].
In this paper, we have proposed algorithms for shortest path
routing and sparse enumeration sort on the newly proposed
architecture called OTIS-hyper hexa-cell (OTIS-HHC) [27]. In
sparse enumeration sort the number of keys to be sorted is
much less than the network size. Here, the number of keys is
assumed to be pβ for some constant β ≤ ½, where p is the
network size. This assumption has also been followed in [28],
[29], [13], [16]. The proposed algorithm for shortest path
routing is optimal as the number of steps required is equal to
the diameter of OTIS-HHC. The parallel algorithm for sparse
enumeration sort proposed in this paper has two versions. For
case I, it requires 4(dh+1) electronic moves + 04 OTIS moves
and for case II, 4(dh+1) electronic moves + 03 OTIS moves are
required. The same algorithm has been proposed for OTISMOT [13] and OTIS k-ary n-cube [16].
The paper is organized as follows: the topology of the OTISHHC is presented in section 2. In section 3, we have presented
the proposed algorithm for shortest path routing and sparse
enumeration sort followed by conclusion in section 4.
2. Topology of OTIS-hyper hexa-cell
The topological structure of an OTIS-HHC is based on the
structure of hypercube, hyper hexa-cell (HHC) and OTIS
topologies [27]. The topology of each group in an OTIS-HHC
is a hyper hexacell. A dh-dimensional HHC is an undirected
graph and is formed by replacing 2d nodes of a hypercube by
replacing one-dimensional HHC. Each dh-dimensional HHC
constitutes a hypercube of dimension dh+1. Various topological
properties have been discussed in detail in [27]. The diameter
of OHHC is (2dh+3). The maximum and minimum node
Abdul Hannan Akhtar IJECS Volume-3 Issue-7 July, 2014 Page No.7388-7393
Page 7388
degrees are (dh+3) and (dh+2) respectively. In an OTIS-HHC,
the number of groups can be equal to the number of processors
within each group or the number of groups can be half the
number of processors within each group. The network size is
(6×2dh-1 )2 for G=P and (6×2dh-1 )2/2 for G=P/2. The bisection
width of an OTIS-HHC is ((6×2dh-1 )/2)2 for G=P and ((6×2dh-1
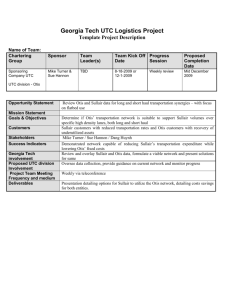
)/4)2 for G=P/2. The topology of one-dimensional OTIS-HHC
is shown in Fig. 1.
0,2
0,5
1,3
0,6
0,4
1,0
1,1
000,000 000,010 000,110 110,000
110,010 110,110. This requires 4 electronic links and
one OTIS link.
Case II: Checking the bits from MSB to LSB
000,000 000,100 000,110 110,000
110,100 110,110. This also requires 4 electronic links
and one OTIS link.
0,0
0,1
Case I: Checking the bits from LSB to MSB
2,0
1,2
2,1
1,4
2,5
1,5
2,2
Theorem 1: The shortest path algorithm on OTIS-HHC takes
(2dh+3) steps which is equal to the diameter of OTIS-HHC and
hence it is optimal.
2,6
2,4
0,0
0,1
0,2
0,5
5,0
5,1
5,5
6,0
5,2
6,1
5,6
6,5
5,4
1,1
6,6
1,5
6,4
4,0
4,1
1,0
6,2
0,6
0,4
2,0
1,2
2,1
1,6
2,5
1,4
2,2
2,6
2,4
4,2
4,3
4,4
4,5
5,0
5,1
Figure 1. Topology of one-dimensional OTIS-HHC
5,5
6,0
5,2
6,1
5,6
6,5
5,4
3. Proposed Algorithms for Shortest
Routing and Sparse Enumeration Sort
Path
4,2
4,5
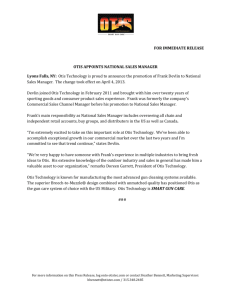
3.1 Shortest Path Routing
In an OTIS-HHC, the processors can be denoted by combining
the group labels and node labels, i.e., u, v where u and v are
the binary representations of group and node labels. Any
processor u, v is connected to processor u’, v’ of the same
group only when u and u’ differ by just one bit or v and v’
differ by one bit. The maximum distance between the
processors within the group is just two electronic links [27]. To
discuss the shortest path routing in an overall OTIS-HHC
architecture, let the source and destination nodes be 000,000
and 011,110 respectively as shown in Fig. 2.
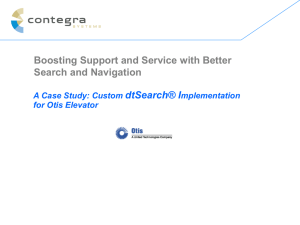
As the inter-group processors are connected through optical
transpose rule, first we need to reach the processor within the
source group that connects the destination group. The traversal
within the group will require change in the bits of the node
label and group traversal can be achieved by interchanging the
node labels with group labels. First, we need to check the labels
of the intermediate nodes with the destination node. This
checking can be performed either from least significant bit
(LSB) to most significant bit (MSB) or from most significant
bit to least significant bit. We have used symbols “” to
represent the path through the electronic link and “” to show
the optical path as shown below.
6,6
6,4
4,0
4,1
6,2
4,6
4,4
Figure 2. Source and destination nodes
3.2 Parallel Sparse Enumeration Sort
In this sorting, only N data elements are considered on a
network size of N2. Let us assume a data set {9, 2, 6, 4, 7, 8}
for the sake of simplicity. In this algorithm, three registers A,
B, and C are used. Registers A and B are used for storing the
keys for comparison and C stores the rank of respective key in
a processing node. We assume two cases of data initialization.
In first case, initial data elements are stored in all processing
nodes group G0. In the second case, the data elements are
initially stored in the node P0 of all the groups. To analyze the
time complexity of proposed algorithm for enumeration sort,
we will count the number of data movements through electronic
links as well as through optical links. We have also shown the
illustrations after each step for this algorithm.
Algorithm Enum-Sort
Case I: all the data elements are populated in G0
Step 1: Data Initialization
/* For all processors in G0, do in parallel */
Initialize the data elements in all the processors
Abdul Hannan Akhtar IJECS Volume-3 Issue-7 July, 2014 Page No.7388-7393
Page 7389
Step 2: /* For all processors in G0, do in parallel */
C:= B
G0
G1
G2
G3
G4
G5
Table 1: Contents of Registers after Step 2
P0
P1
P2
P3
P4
P5
B
9
2
6
4
7
8
C
9
2
6
4
7
8
A
B
C
A
B
C
A
B
C
A
B
C
A
B
C
A
-
Step 3: /* For all processors in G0, do in parallel */
Perform OTIS move on Registers B and C
G0
G1
G2
G3
G4
G5
Table 2: Contents of Registers after Step 3
P0
P1
P2
P3
P4
P5
B
9
C
9
A
B
2
C
2
A
B
6
C
6
A
B
4
C
4
A
B
7
C
7
A
B
8
C
8
A
-
G3
G4
G5
C
A
B
C
A
B
C
A
B
C
A
6
4
4
7
7
8
8
-
6
4
4
7
7
8
8
-
6
4
4
7
7
8
8
-
6
4
4
7
7
8
8
-
6
4
4
7
7
8
8
-
6
4
4
7
7
8
8
-
Step 5: /* For all Groups, do in parallel */
Perform OTIS move on C
G0
G1
G2
G3
G4
G5
Table 4: Contents of Registers after Step 5
P0
P1
P2
P3
P4
P5
B
9
9
9
9
9
9
C
9
2
6
4
7
8
A
B
2
2
2
2
2
2
C
9
2
6
4
7
8
A
B
6
6
6
6
6
6
C
9
2
6
4
7
8
A
B
4
4
4
4
4
4
C
9
2
6
4
7
8
A
B
7
7
7
7
7
7
C
9
2
6
4
7
8
A
B
8
8
8
8
8
8
C
9
2
6
4
7
8
A
-
Step 6: /* For all Groups, do in parallel */
/* For all processors, do in parallel */
If B ≥ C then
A := A + 1
Else
A := A + 0
Step 7. /* For all Groups, do in parallel */
Sum of the contents of Register A of all the processors within
the group and broadcast it within the group
Step 4. /* For all Groups, do in parallel */
Perform Local Broadcast on Registers B and C
G0
G1
G2
Table 3: Contents of Registers after Step 4
P0
P1
P2
P3
P4
P5
B
9
9
9
9
9
9
C
9
9
9
9
9
9
A
B
2
2
2
2
2
2
C
2
2
2
2
2
2
A
B
6
6
6
6
6
6
G0
G1
G2
Table 5: Content of Registers after Step 6
P0
P1
P2
P3
P4
P5
B
9
9
9
9
9
9
C
9
2
6
4
7
8
A
1
1
1
1
1
1
B
2
2
2
2
2
2
C
9
2
6
4
7
8
A
0
1
0
0
0
0
B
6
6
6
6
6
6
C
9
2
6
4
7
8
A
0
1
1
1
0
0
Abdul Hannan Akhtar IJECS Volume-3 Issue-7 July, 2014 Page No.7388-7393
Page 7390
G3
G4
G5
G0
G1
G2
G3
G4
G5
B
C
A
B
C
A
B
C
A
4
9
0
7
9
0
8
9
0
4
2
1
7
2
1
8
2
1
4
6
0
7
6
1
8
6
1
4
4
1
7
4
1
8
4
1
4
7
0
7
7
1
8
7
1
4
8
0
7
8
0
8
8
1
Table 6: Content of Registers after Step 7
P0
P1
P2
P3
P4
P5
B
9
9
9
9
9
9
C
9
2
6
4
7
8
A
1
1
1
1
1
1
B
2
2
2
2
2
2
C
9
2
6
4
7
8
A
0
1
0
0
0
0
B
6
6
6
6
6
6
C
9
2
6
4
7
8
A
0
1
1
1
0
0
B
4
4
4
4
4
4
C
9
2
6
4
7
8
A
0
1
0
1
0
0
B
7
7
7
7
7
7
C
9
2
6
4
7
8
A
0
1
1
1
1
0
B
8
8
8
8
8
8
C
9
2
6
4
7
8
A
0
1
1
1
1
1
Step 8: /* For all Groups, do in parallel */
/* For all processors, do in parallel */
The content of Register A with rank R is to be moved to GR-1
through optical links using transpose rule and perform local
broadcast on A
Step 9: /* For all Groups, do in parallel */
/* For all processors, do in parallel */
Perform OTIS move on Registers A and B where A holds the
rank of B and the final result is shown in Table 9.
Time complexity: Steps 3, 5, 8 and 9, each takes one OTIS
move. Steps 4 and 8, each needs (dh+1) electronic moves
whereas step 7 requires 2(dh+1) electronic moves. Thus the
overall time complexity can be given as 4(dh+1) electronic + 04
OTIS moves.
Table 7: Processors sending data through optical link
P0
P1
P2
P3
P4
P5
G0
B
9
9
9
9
9
9
8
C
9
2
6
4
7
A
6
6
6
6
6
6
G1
B
2
2
2
2
2
2
9
C
2
6
4
7
8
A
1
1
1
1
1
1
G2
B
6
6
6
6
6
6
6
C
9
2
4
7
8
A
3
3
3
3
3
3
G3
B
4
4
4
4
4
4
2
C
9
6
4
7
8
G4
G5
G0
G1
G2
G3
G4
G5
A
B
C
A
B
C
A
B
C
A
B
C
A
B
C
A
B
C
A
B
C
A
B
C
A
2
7
9
4
8
9
5
2
7
2
4
8
2
5
2
7
6
4
8
6
5
2
7
4
4
8
4
5
Table 8: After OTIS move
P0
P1
P2
P3
2
2
2
2
9
2
6
4
1
1
1
1
4
4
4
4
9
2
6
4
2
2
2
2
6
6
6
6
9
2
6
4
3
3
3
3
7
7
7
7
9
2
6
4
4
4
4
4
8
8
8
8
9
2
6
4
5
5
5
5
9
9
9
9
9
2
6
4
6
6
6
6
2
7
7
4
8
7
5
2
7
8
4
8
8
5
P4
2
7
1
4
7
2
6
7
3
7
7
4
8
7
5
9
7
6
P5
2
8
1
4
8
2
6
8
3
7
8
4
8
8
5
9
8
6
Case 2: The data elements are populated in P0 of all the
groups
Step 1: /* For all groups, do in parallel */
Initialize the data elements in P0 of all the groups
Step 2: /* for all groups, for P0 do in parallel */
C:=B
Step 3: Step 4 of Case I
Step 4: Step 5 of Case I
Step 5: Step 6 of Case I
Step 6: Step 7 of Case I
Step 7: Step 8 of Case I
Step 8: Step 9 of Case I
G0
G1
G2
G3
G4
G5
Table 9: Final sorted key elements
p=0 p=1 p=2 p=3 p=4
B
2
4
6
7
8
9
2
6
4
7
C
A
1
2
3
4
5
B
2
4
6
7
8
9
2
6
4
7
C
A
1
2
3
4
5
B
2
4
6
7
8
9
2
6
4
7
C
A
1
2
3
4
5
B
2
4
6
7
8
9
2
6
4
7
C
A
1
2
3
4
5
B
2
4
6
7
8
9
2
6
4
7
C
A
1
2
3
4
5
B
2
4
6
7
8
Abdul Hannan Akhtar IJECS Volume-3 Issue-7 July, 2014 Page No.7388-7393
p=5
9
8
6
9
8
6
9
8
6
9
8
6
9
8
6
9
Page 7391
C
A
9
1
2
2
6
3
4
4
7
5
8
6
Time Complexity: In the later approach, the algorithms
requires 4(dh+1) electronic moves + 03 OTIS moves.
The AT cost of our proposed algorithm for sparse enumeration
sort for OTIS-HHC is minimum compared to algorithms
proposed in [13] and [16] as shown in the table below:
Table 10: Comparision of AT costs
Architecture
Network Electronic
Size
move
OTIS-MOT
81
2054.111
OTIS k-ary n-cube
36
432
OTIS-HHC
81
1296
OTIS
move
243
108
162
4. Conclusion
The shortest path algorithm proposed for OTIS-HHC is optimal
as the number of steps required is equal to the diameter of the
network. In this paper, two approaches of data initialization
have been considered for the sparse enumeration sort. The time
complexity of the algorithm for the first case is 4(dh+1)
electronic moves + 04 OTIS moves and for the second case it is
4(dh+1) electronic moves + 03 OTIS moves.
References
[1] G. Marsden, P. Marchand, P. Harvey and S. Esener,
“Optical Transpose Interconnection System Architecture”,
Optics Letters, XVIII(13), pp 1083-1085,
1993.
[2] F. Kiamilev, P. Marchand, A. Krishnamoorthy, S. Esener,
S.
Lee,
“Performance
Comparison
between
Optoelectronic and VLSI Multistage Interconnection
Networks”, Journal of Light Wave Technology, 9(12), pp
1674 – 1692, 1991.
[3] F. Zane, P. Marchand, R. Paturi, S. Esener, “Scalable
Network Architecture using the Optical Transpose
Interconnection System (OTIS)”, In Proceedings of the
International Conference on Massively Parallel Processing
using Optical Interconnections (MPPOI’ 96), San
Antonio, Texas, pp 114-121, 1996.
[4] F. Kiamilev, P. Marchand, A. Krishnamoorthy, S. Esener,
S.
Lee,
“Performance
Comparison
between
Optoelectronic and VLSI Multistage Interconnection
Networks”, Journal of Light Wave Technology, 9(12), pp
1674-1692, 1991.
[5] A. Krishnamoorthy, P. Marchand, F. Kiamilev, S. Esener,
“Grain-size Consideration for Optoelectronic Multistage
Interconnection Networks”, Applied optics, XXXI(26), pp
5480-5507, 1992.
[6] M. Feldman, S. Esener, C. Guest, S. Lee, “Comparison
between Electrical and Free-space Optical Interconnects
based on Power and Speed Consideration”, Applied
Optics, XXVII(9), pp 1742-1751, 1990.
[7] C. –F. Wang and S. Sahni, “Basic Operations on OTISMesh Optoelectronic Computer”, IEEE Transaction on
Parallel and Distributed Systems, IX(12), pp 1226-1236,
1998.
[8] C. –F. Wang and S. Sahni, 2001, “Matrix Multiplication
on the OTIS-Mesh Optoelectronic Computer”, IEEE
Transactions on Computers, XXXXX(7), pp 635-646,
2001.
[9] Mallick D. K. and Jana P. K., “Matrix Multiplication on
OTIS k-Ary 2-Cube Network”, In Proceedings of the
International Conference on Parallel and Distributed
Processing Techniques and Applications, pp 224-228,
2008.
[10] S. Sahni and C. -F. Wang, “BPC Permutations on the
OTIS Hypercube Optoelectronic Computer”, Informatica,
XXII, pp 263-269, 1998.
[11] S. Rajasekaran and S. Sahni, “Randomized Routing,
Selection and Sorting on OTIS-Mesh”, IEEE Transaction
on Parallel and Distributed Systems, IX(9), pp 833-840,
1998.
[12] A. Osterloh, “Sorting on OTIS-Mesh”, In Proceedings of
the International Parallel and Distributed Processing
Symposium (IPDPS 2000), pp 269-274, 2000.
[13] K. T. Lucas and P. K. Jana, “Sorting and Routing on
OTIS-Mesh of Trees”, Parallel Processing Letters, XX(2),
pp 145-154, 2010.
[14] K. T. Lucas, “Parallel Enumeration Sort on OTISHypercube”, In Proceedings of the IC3, pp 21-31.
[15] K. T. Lucas, “Parallel algorithm for Sorting on OTIS-Ring
Computer”, In Proceedings of the Bangalore Annual
Compute Conference (COMPUTE 2009), pp 1-5.
[16] A. H. Akhtar and K. T. Lucas, “Enumeration Sort on
OTIS k-ary n-cube Architecture”, International Journal of
Engineering and Computer Science, III(7), pp 7173-7176,
2014.
[17] C. –F. Wang and S. Sahni, “Image Processing on the
OTIS-Mesh
Optoelectronic
Computer”,
IEEE
Transactions on Parallel and Distributed Systems, XI(2),
pp 97-109, 2000.
[18] K. T. Lucas, D. K. Mallick, P. K. Jana, “Parallel
Algorithms for the Conflict Graph on the OTIS Triangular
Array”, In Proceedings of the International Conference on
Distributed Computing and Networking, Springer-Verlag
Berlin Heidelberg, pp 274-279, 2008.
[19] B. Mahafzah and B. Jaradat, “The Load Balancing
Problem in OTIS-hypercube Interconnection Networks”,
Journal of Supercomputing, XXXXVI(3), pp 276-297,
2008.
[20] C. Zhao, W Xiao, B. Parhami, “Load-balancing on a
Swapped or OTIS Networks”, Journal of Parallel and
Distributed Computing, XXXXXXIX(4), pp 389-399,
2009.
[21] P. K. Jana, “Polynomial Interpolation and Polynomial
Root Finding on OTIS-Mesh”, Parallel Computing,
XXXII(4), pp 301-312, 2006.
[22] K. T. Lucas and P. K. Jana, “Parallel Algorithms for
Finding Polynomial Roots on OTIS-Torus”, Journal of
Supercomputing, XXXXIV(2), pp 139-153, 2010.
[23] K. T. Lucas, “Parallel Algorithm for Prefix Computation
on OTIS k-ary n-cube Parallel Computer”, In Proceedings
of the International Journal of Recent Trend in
Engineering, I(1), pp 560- 562, 2009.
[24] K. T. Lucas, “The Gossiping on OTIS-Hypercube
Optoelectronic Parallel Computer”, In Proceedings of the
International Conference on Parallel and Distributed
Techniques and Applications, Las Vegas, Nevada, USA,
pp 185-189, 2007.
[25] T. F. Gonzalez, “An Efficient Algorithm for Gossiping in
the Multicasting Communication Environment”, IEEE
Abdul Hannan Akhtar IJECS Volume-3 Issue-7 July, 2014 Page No.7388-7393
Page 7392
[26]
[27]
[28]
[29]
Transactions on Parallel and Distributed Systems,
XIV(7), pp 701-708, 2003.
Lucas K. T., “The Gossiping Algorithm for OTIS k-Ary nCube Parallel Computer”, In Proceedings of the
International Conference on Parallel and Distributed
Processing Techniques and Applications, pp 253-257,
2008.
B. A. Mahafzah, A. Sleit, N. A. Hamad, E. F. Ahmad, T.
M. Abu-Kabeer, “The OTIS Hyper Hexa-cell
Optoelectronic
Architecture”,
Computing,
XXXXXXXXXIV, pp 411-432, 2012.
E. Horowitz, S. Sahni and S. Rajasekaran, Fundamentals
of Computer Algorithms, Galgotia Publications Pvt. Ltd,,
New Delhi, 2002.
S. G Akl, Parallel Sorting Algorithm, Academic Press,
Orlando, FI, 1985.
Abdul Hannan Akhtar IJECS Volume-3 Issue-7 July, 2014 Page No.7388-7393
Page 7393