Protecting Wildlife under Imperfect Observation
advertisement

The Workshops of the Thirtieth AAAI Conference on Artificial Intelligence
Computer Poker and Imperfect Information Games: Technical Report WS-16-06
Protecting Wildlife under Imperfect Observation
Thanh H. Nguyen,1 Arunesh Sinha,1 Shahrzad Gholami,1 Andrew Plumptre,2
Lucas Joppa,3 Milind Tambe,1 Margaret Driciru,4 Fred Wanyama,4 Aggrey Rwetsiba,4
Rob Critchlow,4 Colin Beale4
1
{thanhhng, aruneshs, sgholami, tambe}@usc.edu , University of Southern California, Los Angeles, CA, USA
2
aplumptre@wcs.org, Wildlife Conservation Society, USA
3
lujoppa@microsoft.com, Microsoft Research
4
{margaret.driciru,fred.wanyama,aggrey.rwetsiba}@ugandawildlife.org, Uganda Wildlife Authority, Uganda
5
{rob.critchlow,colin.beale}@york.ac.uk, The University of York
Abstract
non-governmental organizations attempt to enforce effective protection of wildlife parks through well-trained park
rangers. In each time period (e.g., one month), park rangers
conduct patrols within the park area, with the aim of preventing poachers from catching animals either by catching
the poachers or by removing the animals traps laid out by
the poachers. During the rangers’ patrols, poaching signs
are collected and then can be used together with other domain features such as animal density to predict the poachers’
behaviors. In essence, learning poachers’ behaviors or anticipating where the poachers often go for poaching is critical
for the rangers to generate effective patrols.
Previous work has modeled the problem of wildlife protection as a defender-attacker SSG problem (Yang et al.
2014; Brown, Haskell, and Tambe 2014; Fang, Stone, and
Tambe 2015). SSGs have been widely applied for solving
many real-world security problems in which the defender
(e.g., security agencies) attempts to protect critical infrastructure such as airports and ports from attacks by an adversary such as terrorists (Tambe 2011; Basilico, Gatti, and
Amigoni 2009; Letchford and Vorobeychik 2011). Motivated by the success of SSG applications for infrastructure
security problems, previous work have applied SSGs for
wildlife protection and leveraged existing behavioral models of the adversary such as Quantal Response (QR) and
Subjective Utility Quantal Response (SUQR) to capture the
poachers’ behaviors (Yang et al. 2014; Brown, Haskell, and
Tambe 2014; Fang, Stone, and Tambe 2015).
However, existing behavioral models in security games
have several limitations when predicting the poachers’ behaviors. First, while these models assume all (or most) attack data is known for learning the models’ parameters, the
rangers are unable to track all poaching activities within the
park area. Since animals are silent victims of poaching, the
dataset contains only the poaching signs collected by the
rangers during their patrols and the large area of the park
does not allow for thorough patrolling of the whole forest
area. This imperfectly observed or biased data can result
in learning inaccurate behavioral models of poachers which
would mislead the rangers into conducting ineffective patrols. Second, while existing behavioral models such as
QR and SUQR are built upon discrete choice models that
posits models of a single agent making a choice. However,
in wildlife protection there are multiple attackers and it is
Wildlife poaching presents a serious extinction threat to many
animal species. In order to save wildlife in designated
wildlife parks, park rangers conduct patrols over the park area
to combat such illegal activities. An important aspect of the
patrolling activity of the rangers is to anticipate where the
poachers are likely to catch animals and then respond accordingly. Previous work has applied defender-attacker Stackelberg Security Games (SSGs) to solve the problem of wildlife
protection, wherein attacker behavioral models are used to
predict the behaviors of the poachers. However, these behavioral models have several limitations which limit their accuracy in predicting poachers’ behavior. First, existing models
fail to account for the rangers’ imperfect observations w.r.t
poaching activities (due to the limited capability of rangers
to patrol thoroughly over a vast geographical area). Second,
these models are built upon discrete choice models that assume a single agent choosing targets, while it is infeasible to
obtain information about every single attacker in wildlife protection. Third, these models do not consider the effect of past
poachers’ actions on the current poachers’ activities, one of
the key factors affecting the poachers’ behaviors.
In this work, we attempt to address these limitations while
providing three main contributions. First, we propose a novel
hierarchical behavioral model, HiBRID, to predict the poachers’ behaviors wherein the rangers’ imperfect detection of
poaching signs is taken into account — a significant advance
towards existing behavioral models in security games. Furthermore, HiBRID incorporates the temporal effect on the
poachers’ behaviors. The model also does not require a
known number of attackers. Second, we provide two new
heuristics: parameter separation and target abstraction to
reduce the computational complexity in learning the model
parameters. Finally, we use the real-world data collected in
Queen Elizabeth National Park (QENP) in Uganda over 12
years to evaluate the prediction accuracy of our new model.
Introduction
Wildlife protection is a global concern. Many species such
as tigers and rhinos, etc are in danger of extinction because
of poaching (Montesh 2013; Secretariat 2013). The extinction of animals could destroy the ecosystem, seriously affecting all living things on the earth including human beings. To prevent wildlife poaching, both governmental and
c 2016, Association for the Advancement of Artificial
Copyright Intelligence (www.aaai.org). All rights reserved.
371
i and the defender is not protecting that target, the attacker
obtains a reward Ria while the defender gets a penalty Pid .
Conversely, the attacker receives a penalty Pia while the defender achieves a reward Rid . The expected utilities of the
defender and attacker are then computed as the follows:
not possible to attribute an attack to any particular attacker.
Finally, these models were mainly applied for single-shot
security games in which the temporal effect on attacks is not
considered. Yet, in wildlife protection, the poachers repeatedly catch animals in the park, hence it is important to take
past activities into account when reasoning about the poachers’ behaviors.
In this paper, we attempt to address these limitations of
existing behavioral models while providing the following
main contributions. First, we introduce a new hierarchical behavioral model, HiBRID, which consists of two key
components: one component accounts for the poachers’ behaviors and the another component models the rangers’ imperfect detection of poaching signs. HiBRID significantly
advances the existing behavioral models in security games
by directly addressing the challenge of rangers’ imperfect
observations using a detectability component. Furthermore,
in HiBRID, we incorporate the dependence of the poachers’ behaviors on their activities in the past. Last but not
least, we adopt logistic models to formulate the two components of HiBRID that enables capturing the aggregate behavior of attackers without requiring a known number of attackers. Second, we provide two new heuristics to reduce
the computational cost of learning the HiBRID model’s parameters, namely parameter separation and target abstraction. The first heuristic uses the two components of the hierarchical model to divide the set of model parameters into
separate subsets and then iteratively learns these subsets of
parameters separately while fixing the values of the other
subsets. This heuristic decomposes the learning process into
less complicated learning components which could potentially help in speeding up the learning process. The second heuristic of target abstraction works by leveraging the
continuous spatial structure of the wildlife domain, starting
the learning process with a coarse division of forest area
and gradually using finer division instead of directly starting with finer divisions, leading to improved runtime overall
with no loss in accuracy. Third, we conduct extensive experiments to evaluate our new model based on real-world
wildlife data collected in QENP over 12 years.
Uid = ci Rid + (1 − ci )Pid
Uia = ci Pia + (1 − ci )Ria
(1)
(2)
Behavioral Models of Adversaries. In security games, different behavioral models have been proposed to capture the
attacker’s behaviors. The QR model is one of the most popular behavioral model which attempts to predict a stochastic distribution of the attacker’s responses (McFadden 1972;
McKelvey and Palfrey 1995). In general, QR predicts the
probability that the attacker will choose each target to attack
with the intuition is that the higher expected utility of a target, the more likely that the attacker will choose that target.
A more recent behavioral model, SUQR, also attempts to
predict an attacking distribution over the targets (Nguyen et
al. 2013). However, instead of relying on expected utility,
SUQR uses the subjective utility function which is a linear
combination of all features that can influence the attacker’s
behaviors.
Ûia = w1 ci + w2 Ria + w3 Pia
(3)
where (w1 , w2 , w3 ) are the key model parameters which
measure the importance of the defender’s coverage, the attacker’s reward and penalty w.r.t the attacker’s action. Based
on subjective utility, SUQR predicts the attacking probability at target i as follows:
a
eÛi
qi = P
Ûja
je
(4)
SUQR was shown to outperform QR in the context of both
infrastructure security and wildlife protection.
Wildlife Protection.
In
wildlife domains such as
Queen Elizabeth National
Park (QENP) in Uganda
(Figure 1), lives of many
species such as hippos, elephants, and kobis, etc are
in danger because of illegal human activities such as
poaching. The park rangers
attempt to conduct patrols
over a large geographical
area (e.g., ≈ 2500km2 in
QENP) to protect wildlife
from these illegal activities.
While the poachers aim at Figure 1: Queen Elizabeth
catching animals by setting national park
trapping tools such as snares,
the rangers try to combat
with the poachers by confiscating these trapping tools.
In order to conduct effective patrols over the park, it is
important for the rangers to anticipate where the poachers
Background & Related Work
Stackelberg Security Games. In Stackelberg security
games, there is a defender who attempts to optimally allocate her limited security resources to protect a set of targets against an adversary who tries to attack one of the targets (Tambe 2011). One key assumption of SSGs is that
the defender commits to a mixed strategy first while the attacker can observe the defender’s strategy and then take action based on that observation. A pure strategy of the defender is an assignment of her limited resources to a subset
of targets and a mixed strategy of the defender refers to a
probability distribution over all possible pure strategies. The
defender’s mixed strategies can be represented as a marginal
coverage vector over the targets (i.e., the coverage probabilities that the defender will protect each target) (Korzhyk,
Conitzer, and Parr 2010). We denote by N the number of
targets and 0 ≤ ci ≤ 1 the defender’s coverage probability at target i for i = 1 . . . N . If the attacker attacks target
372
are likely to set trapping tools. Fortunately, poaching signs
(e.g., snares) collected by the rangers while patrolling together with other domain features such as animal density,
area slope and habitat, etc can be used to learn the poachers’
behaviors. For example, if the rangers find a lot of snares
at certain locations, it indicates that the poachers often go to
those locations for poaching. However, the rangers’ capability of making observations over a large geographical area
is limited. For example, the rangers usually follow certain
paths/trails to patrol; they can only observe over the areas
around these paths/trails which means that they may not be
able to make observations in other further areas. In addition,
in areas such as dense forests, it is difficult for the rangers
to search for snares. As a result, the rangers’ observations
may be inaccurate. In other words, there may be still poaching activities happening in areas where rangers did not find
any poaching sign. Therefore, totally relying on the rangers’
observations would lead to an inaccurate prediction of the
poachers’ behaviors, deteriorating the rangers’ patrol effectiveness. Furthermore, the rangers are also unaware of the
total number of attacks happening in the park. Finally, when
modeling the poachers’ behaviors, it is critical to incorporate important aspects that affect the poachers’ behaviors
including time dependency of the poachers’ activities and
patrolling frequencies of the rangers.
Previous work in security games have modeled the problem of wildlife protection as a SSG in which the rangers play
in a role of the defender while the poachers refer to the attacker (Yang et al. 2014). The park area can be divided into
a grid where each grid cell represents a target. The rewards
and penalties of each target w.r.t the rangers and poachers
can be determined based on domain features such as animal density. Previous work then focuses on computing the
optimal patrolling strategy for the rangers given that poachers’ behaviors are predicted based on existing adversary behavioral models. However, as explained previously, these
models can not handle the challenges of observation bias
of the rangers, time dependency of the poachers’ behaviors,
as well as unknown number of attackers which hinder them
from predicting well in the wildlife domain.
In ecology research, while previous work mainly focused
on estimating the animal density (MacKenzie et al. 2002),
there is one recent work which we are aware of that attempts
to predict the behaviors of poachers based on wildlife data
which handles the challenge of imperfect observations of the
rangers (Critchlow et al. 2015). However, this work also
has several limitations. First, the proposed model does not
consider the time dependency of the poachers’ behaviors.
This model also does not consider the effect of the rangers’
patrols on poaching activities. Furthermore, the proposed
model is not well evaluated wherein the prediction accuracy
of the model is not measured. Finally, this work does not
provide any solution for generating patrolling strategies for
the rangers given the behavioral model of the poachers.
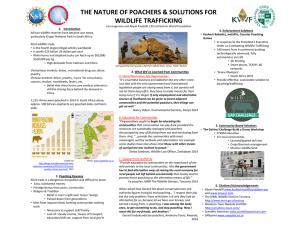
Area habitat
Ranger patrol
Attacking probability
Animal density
Area slope
Detection probability
Distance to
rivers / roads /
villages
…
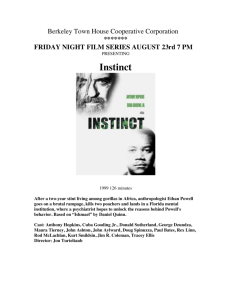
Ranger observation
Figure 2: Overview of the HiBRID model
Ranger Imperfect Detection), to predict poachers’ behaviors in wildlife domain, taking into account the challenge
of rangers’ imperfect observation. Our model is outlined
in Figure 2. Overall, HiBRID consists of two layers. One
layer models the probability the poachers attack each target
wherein the temporal effect on the poachers’ behaviors is
incorporated. In this layer, a prior number of attacks is not
required to predict the poachers’ behaviors. The next layer
predicts the conditional probability of the rangers detecting
any poaching sign at a target given that the poachers attack
that target. These two layers are then integrated to predict
the final observations of the rangers.
In HiBRID, domain features such as animal density, distance to rivers/roads/villages, as well as area habitat and
slope, etc are incorporated to predict either attacking probabilities or detection probabilities or both. Furthermore, we
incorporate the effect of the rangers’ patrols on both layers, i.e., how the poachers adapt their behaviors according
to rangers’ patrols and how the rangers’ patrols determine
the rangers’ detectability of poaching signs.
Hierarchical Behavioral Model: HiBRID
We denote by T the number of time steps, N the number of
targets, and K the number of domain features. At each time
step t, each target i is associated with a set of feature values
{xkt,i } where k = 1 . . . K and xkt,i is the value of the k th
feature at (t, i). In addition, ct,i is defined as the coverage
probability of the rangers at (t, i). When the rangers patrol
target i at time step t, they have observation ot,i which takes
an integer value in {−1, 0, 1}. Specifically, ot,i = 1 indicates that the rangers observe a poaching sign at target i in
time step i, ot,i = 0 means that the rangers have no observation at target i in time step i and ot,i = −1 means that the
rangers did not patrol target i in time step i. Furthermore, we
define at,i ∈ {0, 1} as the actual action of poachers at (t, i)
which is hidden from the rangers. Specifically, at,i = 1 indicates the poachers attack target i in time step t; otherwise,
at,i = 0 means the poachers did not attack at (t, i). In this
work, we only consider the situation of attacked or not (i.e.,
at,i ∈ {0, 1}); the case of multiple-level attacks would be an
interesting direction for future work. Moreover, we mainly
focus on the problem of false negative observations, meaning that there may still exist poaching activity at locations
where the rangers found no sign of poaching. On the other
hand, we make the reasonable assumption that there is no
Behavioral Learning
In this work, we introduce a new hierarchical behavioral
model, HiBRID (Hierarchical Behavioral model against
373
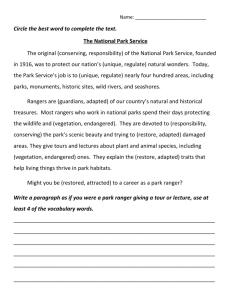
i = 1…N
a t,i
λ
i = 1…N
c t,i
o t,i
a t+1,i
w
λ
Furthermore, if the poachers attack at (t, i), we predict the
probability that the rangers can detect any poaching signs as
follows:
0
ew [xt,i ,1]
(6)
p(ot,i = 1|at,i = 1, ct,i , xt,i ) = ct,i ×
0
1 + ew [xt,i ,1]
where the first term is the probability that the rangers are
present at (t, i) and the second term indicates the probability that the rangers can detect any poaching sign when patrolling at (t, i). Furthermore, w = {wk } is the (K + 1) × 1
vector of parameters which indicates the significance of domain features in affecting the rangers’ detectability. Here,
we use the same set of domain features xt,i as used in the
attack probability Equation 5, for ease of presentation, yet
the feature sets that influence the attacking probability and
detection probability may be different. For example, the distances to rivers or villages may have impact on the poachers’
behaviors but not the rangers’ detectability. Finally, we use
p(at,i = 1|at−1,i , ct,i ) and p(ot,i = 1|at,i = 1, ct,i ) as the
abbreviations of the LHSs in Equations 5 and 6.
Now, we will explain our approach for learning the parameters (λ, w) of our hierarchical model. The domain features xt,i is omitted in all equations for simplification.
c t+1,i
o t+1,i
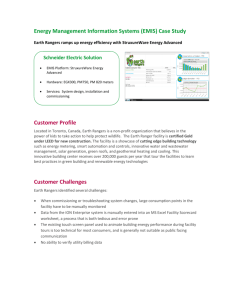
w
Figure 3: Graphical model representation of HiBRID
false positive observation, meaning that if the rangers found
any poaching sign at a target, poachers did attack that target. In other words, we have p(at,i = 1|ot,i = 1) = 1 and
p(ot,i = 1|at,i = 0) = 0.
The graphical model representation of HiBRID is shown
in Figure 3 wherein the directed edges indicate the dependence between elements of the model. In addition, the grey
nodes refer to known elements for the rangers such as the
rangers’ coverages and observations while the white nodes
represent the unknown elements such as the actual actions of
poachers. In HiBRID, the actual actions of poachers are considered as the latent elements. The elements λ and w are the
model parameters which we will explain later. In Figure 3,
we do not show the domain features for simplification; these
features are known elements in HiBRID. In modeling the
attacking probabilities of the poachers, we assume that the
poachers’ behaviors at,i depends on the poachers’ activities
in the past at−1,i , the rangers’ patrolling strategies ct,i , as
well as the domain features xt,i . For example, the poachers
are more likely to attack targets with high animal density and
low coverage of rangers. They may also tend to come back
to the areas where they attacked before. For modeling the
rangers’ observation uncertainty, we expect that the rangers’
observations ot,i depend on the actual actions of the poachers at,i , the rangers’ coverage probabilities ct,i and domain
features xt,i . Moreover, we adopt the logistic model to predict the poachers’ behaviors; one advantage of the logistic
model compared to the conditional logistic model, SUQR,
is that it does not assume a known number of attacker and
models probability of attack at every target independently.
Thus, given the actual action of poachers, at−1,i , at previous time step (t − 1, i), the rangers’ coverage probability
ct,i at (t, i), and the domain features xt,i = {xkt,i }, we aim
at predicting the probability that poachers attack (t, i) based
on the following logistic formulation:
Parameter Estimation
In order to estimate (λ, w), we attempt to maximize the loglikelihood that the rangers can have observations o = {ot,i }
given domain features x = {xt,i } and the rangers’ coverage
probabilities c = {ct,i } for all time steps t = 1 . . . T and
targets i = 1 . . . N which is formulated as follows:
max log p(o|c, x, λ, w) = max log
λ,w
eλ [xt,i ,ct,i ,at−1,i ,1]
1+e
λ0 [xt,i ,ct,i ,at−1,i ,1]
X
p(o, a|c, x, λ, w) (7)
a
where a = {at,i } is the vector of all actions of poachers.
Due to the presence of unobserved variables a = {at,i }, we
use the standard method, Expectation Maximization (EM),
to decompose the log-likelihood and then solve the problem.
Essentially, EM is a local search method in which given an
initial value for every model parameter, EM iteratively updates the parameter values until it reaches a local optimal
solution of (7). Each iteration of EM consists of two key
steps:
• E step: compute p(a|o, c, (λ, w)old )
P
• M step: max a p(a|o, c, (λ, w)old ) log(p(o, a|c, λ, w))
λ,w
In EM, the E (Expectation) step attempts to compute the
probability that the poachers take actions a = {at,i } given
the rangers’ observations o, the rangers’ patrols c, the domain features x, and current values of the model parameters
(λ, w). On the other hand, in the M (Maximization) step,
it tries to maximize the expectation of the logarithm of the
complete-data likelihood function given the action probabilities computed in the E step. Observe that the objective in
the M step can be split into two additive parts as follows:
0
p(at,i = 1|at−1,i , ct,i , xt,i ) =
λ,w
(5)
XX
p(at,i |o, c, (λ, w)
old
) log p(ot,i , at,i |ct,i , w)
t,i at,i
where λ = {λk } is the (K + 3) × 1 vector of parameters
which measure the importance of all factors that can influence the poachers’ decisions. λK+3 is the free parameter
and λ0 is the transpose vector of λ.
=
XX
old
p(at,i |o, c, (λ, w)
) log p(ot,i |at,i , ct,i , w)
t,i at,i
XX X
old
+
p(at,i , at−1,i |o, c, (λ, w)
) log p(at,i |at−1,i , ct,i , λ)
t,i at,iat−1,i
374
(8)
where a0,i ∈ ∅. In (8), the first component is obtained as a
result of decomposing w.r.t the detection probabilities of the
rangers at every (t, i) (Equation 6). In addition, the second
component results from decomposing according to the attacking probabilities at every (t, i) (Equation 5). Following
this split, for our problem the E step reduces to the computing the following two quantities:
• Total probability: p(at,i |o, c, (λ, w)old )
• 2-step probability: p(at,i , at−1,i |o, c, (λ, w)old )
which can be computed by accounting for missing observations, i.e., ot,i = −1 when rangers do not patrol at (t, i).
This can be done by introducing p(ot,i = −1|at,i ) = 1 when
the rangers’ coverage ct,i = 0.
Although we can decompose the log-likelihood, the EM
algorithm is still time-consuming due to the large number of
targets. Therefore, we use two novel ideas to speed up the algorithm: parameter separation for accelerating the convergence of EM and target abstraction for reducing the number
of targets. The details of these two ideas are explained in the
following sections.
Parameter Separation. Following the technique of multicycle expected conditional maximization (MECM) (Meng
and Rubin 1993), as shown in Equation 8, the objective function can be divided into two separate functions w.r.t attack
parameters λ and detection parameters w: Qd (w) + Qa (λ)
where the detection function Qd (w) is the first term of the
RHS in Equation 8 and the attack function Qa (λ) is the second term. Therefore, instead of learning both sets of parameters simultaneously, we decompose each iteration of EM
into two E steps and two M steps as follows:
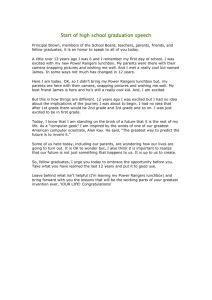
Figure 4: Target Abstraction
features. Therefore, we expect that the parameters learned
in both the original and abstracted grid would expose similar characteristics. Hence, the model parameters estimated
based on the abstracted grid could be effectively used to derive the final values of the parameters in the original one.
In this work, we leverage the values of parameters learned
in the abstracted grid in two ways: (i) reduce the number of
restarting points (i.e., initial values of parameters) for reaching different local optimal solutions in EM; and (ii) reduce
the number of iterations in each round of EM. The idea of
target abstraction is outlined in Figure 4 wherein each black
dot corresponds to a set of parameter values at a particular
iteration given a specific restarting points. At the first stage,
we estimate the parameter values in the abstracted grid given
a large number of restarting points R, assuming that we can
run M1 EM iterations. At the end of the first stage, we obtain
R different sets of parameter values; each corresponds to a
local optimal solution of EM in the abstracted grid. Then at
the second stage, these sets of parameter values are used to
estimate the model parameters in the original grid as the following: (i) only a subset of K resulting parameter sets which
refer to the top local optimal solutions in the abstracted grid
are selected as initial values of parameters in the original
grid; and (ii) instead of running M1 EM iterations again, we
only proceed with M2 << M1 iterations in EM since we
expect that these selected parameter values are already well
learned in the abstracted grid and thus could be considered
as warm restarts in the original grid.
• E1 step: compute total probability
• M1 step: w∗ = argmaxw Qd (w, (λ, w)old ); wold =
w∗
• E2 step: compute 2-step probability
• M2 step: λ∗ = argmaxλ Qa (λ, (λ, w)old ); λold = λ∗
The convergence of the above parameter separation follows from the analysis of MECM (Meng and Rubin 1993).
Note that the detection and attack components are simpler
functions compared to the original objective since these
components only depends on the detection and attack parameters respectively. Furthermore, at each EM iteration,
the parameters are more updated based on the decomposition since the attack parameter is now updated based on
the new detection parameters from the E1/M1 steps instead
of the old detection parameters from the previous iteration.
Thus, we expect that by decomposing each iteration of EM
according to attack and detection parameters, EM would
converge more quickly.
Target Abstraction. Our second idea is to reduce the number of targets via target abstraction. By exploiting the spatial structure of the conservation area (i.e., the spatial connectivity between grid cells), we can divide the area into
a smaller number of grid cells by merging each cell in the
original grid with its neighbors to a single bigger cell. The
corresponding domain features are aggregated accordingly.
Intuitively, neighboring cells tend to have similar domain
Experiments
In our experiments, we aim at extensively assessing the prediction accuracy of our HiBRID model compared to existing
behavioral models based on real-world wildlife data. In the
following, we provide a brief description of the real-world
wildlife data used for our experiments.
Real-world Wildlife Data
In learning the poachers’ behaviors, we use the wildlife data
collected by the rangers over 12 years from 2003 to 2014 in
Queen Elizabeth national park in Uganda. This work is accomplished under the collaboration with Wildlife Conservation Society (WCS) and Uganda Wildlife Authority (UWA).
While patrolling, the park rangers record all information
such as locations (latitude/longitude), times, and observa-
375
Models
HiBRID
HiBRID-Abstract
HiBRID-NoTime
Logit
SUQR
SVM
Rainy I
0.78
0.72
0.70
0.47
0.47
0.46
Rainy II
0.73
0.74
0.70
0.59
0.58
0.48
Dry I
0.79
0.71
0.73
0.57
0.58
0.54
Dry 2
0.59
0.56
0.58
0.43
0.43
0.44
Models
HiBRID
HiBRID-Abstract
HiBRID-NoTime
Logit
SUQR
SVM
Rainy I
0.76
0.74
0.72
0.57
0.58
0.53
Rainy II
0.68
0.68
0.65
0.56
0.55
0.46
Dry I
0.75
0.73
0.75
0.57
0.58
0.51
Dry 2
0.74
0.73
0.70
0.58
0.56
0.55
Table 1: AUC: Commercial Animal
Table 2: AUC: Non-Commercial Animal
tions (e.g., signs of human illegal activities). The collected
human signs can be divided into six different groups: commercial animal (i.e., human signs which refer to poaching
commercial animals such as buffalo, hippo and elephant,
etc), non-commercial animal, fishing, encroachment, commercial plant, and non-commercial plant. In this work, we
mainly focus on two types of human illegal activities: commercial animal and non-commercial animal. The poaching data is then divided into four different groups according
to four seasons in Uganda: dry season I (December, January, and February), dry season II (Jun, July, and August),
rainy season I (March, April, and May), and rainy season
II (September, October, November). We aim at learning
behaviors of the poachers w.r.t these four seasons as motivated by the fact that the poachers’ activities usually vary
seasonally. At the end, we obtain eight different categories
of wildlife data w.r.t the two poaching types and four seasons. Furthermore, we achieve a variety of domain features
including the animal density, area slope, habitat, npp, and
locations of villages/rivers/roads based on the instructions
provided by (Critchlow et al. 2015).
The park area is divided into a 1km × 1km grid which
consists of more than 2500 grid cells. All domain features as
well as the rangers’ patrols and observations are then aggregated (or interpolated) into the grid cells. We also refine the
poaching data by removing all abnormal data points such as
the data points which indicate that the rangers conducted patrols outside the QENP park or the rangers moved too fast,
etc. Since we attempts to predict the poachers’ actions in
the future based on their activities in the past, we apply a
time window (i.e., five years) with an 1-year shift to split the
poaching data into eight different pairs of training/test sets.
For example, the oldest training/test sets correspond to fouryear data (2003–2006) for training and one-year (2007) data
for testing. In addition, the latest training/test sets refer to
the four years (2010–2013) and one year (2014) of data for
training and testing respectively. The prediction accuracy of
each category (according to seasons and poaching types) is
averaged over these eight different training/test sets.
and 2. Overall, Tables 1 and 2 show that HiBRID provides
the best prediction accuracy, demonstrating the significant
advance of incorporating the observation uncertainty and the
temporal effects into predicting the poachers’ behaviors.
Summary
In summary, learning poachers’ behaviors or anticipating
where the poachers often go for poaching is critical for the
rangers to generate effective patrols. In this work, we propose a novel hierarchical behavioral model, HiBRID, to predict the poachers’ behaviors wherein the rangers’ imperfect
detection of poaching signs is taken into account. Furthermore, our HiBRID model incorporates the temporal effect
on the poachers’ behaviors. The model also does not require
a known number of attackers. Moreover, we provide two
new heuristics: parameter separation and target abstraction to reduce the computational complexity in learning the
model parameters. Finally, we use the real-world data collected in Queen Elizabeth National Park (QENP) in Uganda
over 12 years to evaluate the prediction accuracy of our new
model. The experimental results demonstrate the superiority
of our model compared to other existing models.
References
Basilico, N.; Gatti, N.; and Amigoni, F. 2009. Leaderfollower strategies for robotic patrolling in environments
with arbitrary topologies. In AAMAS.
Brown, M.; Haskell, W. B.; and Tambe, M. 2014. Addressing scalability and robustness in security games with
multiple boundedly rational adversaries. In GameSec.
Critchlow, R.; Plumptre, A.; Driciru, M.; Rwetsiba, A.;
Stokes, E.; Tumwesigye, C.; Wanyama, F.; and Beale, C.
2015. Spatiotemporal trends of illegal activities from rangercollected data in a ugandan national park. Conservation Biology.
Fang, F.; Stone, P.; and Tambe, M. 2015. When security
games go green: Designing defender strategies to prevent
poaching and illegal fishing. In IJCAI.
Korzhyk, D.; Conitzer, V.; and Parr, R. 2010. Complexity of computing optimal stackelberg strategies in security
resource allocation games. In AAAI.
Letchford, J., and Vorobeychik, Y. 2011. Computing
randomized security strategies in networked domains. In
AARM.
MacKenzie, D. I.; Nichols, J. D.; Lachman, G. B.; Droege,
S.; Andrew Royle, J.; and Langtimm, C. A. 2002. Esti-
Prediction Accuracy
In our experiments, we evaluate six different models: HiBRID, HiBRID-Abstract (HiBRID with target abstraction),
HiBRID-NoTime (HiBRID without considering the temporal effect on the poachers’ behaviors), Logit (Logistic Regression), SUQR, and SVM (Support Vector Machine). We
use AUC (Area Under the Curve) to measure the prediction
accuracy of these models. The results are shown in Tables 1
376
mating site occupancy rates when detection probabilities are
less than one. Ecology 83(8):2248–2255.
McFadden, D. 1972. Conditional logit analysis of qualitative choice behavior. Technical report.
McKelvey, R., and Palfrey, T. 1995. Quantal response equilibria for normal form games. Games and economic behavior 10(1):6–38.
Meng, X.-L., and Rubin, D. B. 1993. Maximum likelihood estimation via the ecm algorithm: A general framework. Biometrika 80(2):267–278.
Montesh, M. 2013. Rhino poaching: A new form of organised crime1. Technical report, University of South Africa.
Nguyen, T. H.; Yang, R.; Azaria, A.; Kraus, S.; and Tambe,
M. 2013. Analyzing the effectiveness of adversary modeling
in security games. In AAAI.
Secretariat, G. 2013. Global tiger recovery program implementation plan: 2013-14. Report, The World Bank, Washington, DC.
Tambe, M. 2011. Security and Game Theory: Algorithms,
Deployed Systems, Lessons Learned. Cambridge University
Press.
Yang, R.; Ford, B.; Tambe, M.; and Lemieux, A. 2014.
Adaptive resource allocation for wildlife protection against
illegal poachers. In AAMAS.
377