Annealed Importance Sampling for Structure Learning in Bayesian Networks
advertisement

Proceedings of the Twenty-Third International Joint Conference on Artificial Intelligence
Annealed Importance Sampling for
Structure Learning in Bayesian Networks∗
Teppo Niinimäki and Mikko Koivisto
HIIT & Department of Computer Science, University of Helsinki, Finland
teppo.niinimaki@cs.helsinki.fi, mikko.koivisto@cs.helsinki.fi
Abstract
2000], and it has been applied in various forms also to structure learning in BNs. We summarize some corner stones
of the developments. Madigan and York [1995] presented a
Markov chain that moves in the space of DAGs by simple arc
changes. Friedman and Koller [2003] obtained a significantly
faster-mixing chain by operating, not directly on DAGs, but
in the much smaller and smoother space of node orderings.
A drawback of the sampler, order-MCMC in the sequel, is
that it introduces a bias favoring DAGs that are compatible
with many node orderings. Ellis and Wong [2008] enhanced
order-MCMC in two dimensions: a sophisticated sampler
exploiting tempered distributions was implemented, and a
heuristic for correcting the bias was introduced. Niinimäki et
al. [2011] extended order-MCMC in another dimension, by
showing that sampling suitable partial orders, instead of linear orders, further improves the mixing of the Markov chain,
with negligible computational overhead. Also other refinements to Madigan and York’s sampler have been presented
[Eaton and Murphy, 2007; Grzegorczyk and Husmeier, 2008;
Corander et al., 2008], however with somewhat more limited
advantages over order-MCMC.
While the current MCMC methods for structure learning
seem to work well in many cases, they, unfortunately, fail to
satisfy some key desiderata:
We present a new sampling approach to Bayesian
learning of the Bayesian network structure. Like
some earlier sampling methods, we sample linear
orders on nodes rather than directed acyclic graphs
(DAGs). The key difference is that we replace the
usual Markov chain Monte Carlo (MCMC) method
by the method of annealed importance sampling
(AIS). We show that AIS is not only competitive
to MCMC in exploring the posterior, but also superior to MCMC in two ways: it enables easy and efficient parallelization, due to the independence of the
samples, and lower-bounding of the marginal likelihood of the model with good probabilistic guarantees. We also provide a principled way to correct the bias due to order-based sampling, by implementing a fast algorithm for counting the linear
extensions of a given partial order.
1
Introduction
To learn the structure of a Bayesian network (BN) [Pearl,
1988; 2000] from data, the Bayesian paradigm [Buntine,
1991; Cooper and Herskovits, 1992; Madigan and York,
1995] offers many appealing features, such as an explicit way
to enter prior knowledge and full characterization of uncertainty about the quantities of interest, including proper treatment of potential non-identifiability issues. A major drawback of the Bayesian approach is, however, its large computational requirements. Indeed, the space of structures, namely
directed acyclic graphs (DAGs), grows rapidly with the number of nodes in the network, and—even if a single good DAG
could be found relatively fast—exploring the whole landscape of DAGs to some sufficient extent presents a difficult
computational challenge. Currently, the fastest exact algorithms scale up to around 25-node instances [Koivisto and
Sood, 2004; Koivisto, 2006; Tian and He, 2009].
The Markov chain Monte method has revolutionized applied mathematics in general [Diaconis, 2009] and the practice of Bayesian statistics in particular [Cappé and Robert,
1. Guarantees. We would like to know how the algorithm’s
output relates to the quantity of interest. For instance, is
it a lower bound, an upper bound, or an approximation
to within some multiplicative or additive term? (Existing
MCMC methods offer such guarantees only in the limit
of running the algorithm infinitely many steps.)
2. Parallelizability. We would like to fully exploit parallel computation, that is, to run the algorithm in parallel
on thousands of processors, preferably without frequent
synchronization or communication between the parallel processes. (Existing MCMC methods are designed
rather for a small number of very long runs.)
3. Bias correction. We would like to take advantage of
the reduced state space (whether total or partial orders),
yet enable the use of the uniform prior on (Markovequivalent) DAGs. (Existing MCMC methods rely on
heuristic arguments to correct the bias and may become
computationally infeasible with small data; we elaborate
on this in Section 2.2.)
∗
This research is supported in part by the Academy of Finland,
grants 125637, 218153, and 255675.
1579
of a directed acyclic graph (DAG) (N, A), where each node
v ∈ N = {1, . . . , n} corresponds to a random variable Dv ,
and the arc set A ⊆ N × N specifies the parent set of the
node, Av = {u ∈ N : uv ∈ A}. For each node v and its
parent set Av the BN specifies a local conditional distribution
p(Dv |DAv , Av ), and composes the joint distribution of D as
p(Dv |DAv , Av ) .
p(D|A) =
The present work makes a step toward satisfying these
three desiderata. Motivated by the first desire for guarantees, we seek a sampler such that we know exactly from
which distribution the samples are drawn. Here, the method
of annealed importance sampling (AIS) by Neal [2001] provides an appealing solution. It enables drawing independent
and identically distributed samples and computing the associated importance weights, so that the expected value of
each weighted sample matches the quantity of interest. In
this setting, already a small number of samples may suffice, not only for finding an accurate estimate, but also for
showing a relatively tight, high-confidence lower bound on
the true value [Gomes et al., 2007; Gogate et al., 2007;
Gogate and Dechter, 2011]. The independence of the samples also readily offers an easy way to parallelize the computations, thus satisfying the second desideratum. Finally,
we address the issue of bias correction by computing the required correction term explicitly. This amounts to implementing an efficient algorithm for counting the number of topological sortings of a given DAG, or in other words, the linear
extensions of the corresponding partial order. The problem
is #P-hard [Brightwell and Winkler, 1991], which may have
lead to the search for indirect solutions in earlier works. However, as we will show in this paper, a careful implementation
of a dynamic programming algorithm allows us to count the
number of linear extensions exactly up to around 40-node instances, typically within a few seconds.
The purpose of this report is to communicate the main
ideas and motivation underlying the proposed approach,
demonstrate the potential of the approach, identify its current bottlenecks, and discuss the prospects of future research
in the suggested direction. We have targeted our experiments
to study rather specific questions using a few benchmark data
sets. Extensive experimentation is left for future work.
We note that previously Battle et al. [2010] have applied
AIS to structure learning in Bayesian networks in a molecular biology application. The key difference to our method
is that, instead of node orderings, they sample fully specified
network models. They motivate the choice of AIS mainly
by the complexity and multi-modality posterior distribution,
which often lead to slow mixing of usual MCMC methods.
2
v∈N
Here and henceforth, we identify the DAG with its arc set
A, with the understanding that the node set N is fixed while
varying configurations for A are of our interest.
Indeed, we treat the arc set A as a random variable and consider the Bayesian approach to learn A from observed values
of D, called data. In this setting it is customary to extend the
BN model to the case where D is not a single vector but a
matrix of random variables, consisting of m vectors, so that
each Dv is a tuple of m random variables. Usual assumptions
of exchangeability or modularity concerning the parametrization of the local conditional distributions, keep the above factorization of p(D|A) valid. Under the most popular specifications, this term can be efficiently computed for a given A
[Heckerman et al., 1995]. By choosing some prior distribution p(A), the posterior distribution is obtained via the Bayes
rule: p(A|D) = p(A)p(D|A)/p(D), where is p(D) is the
marginal likelihood of the model, sometimes also called the
evidence or the normalization constant. In addition to this
fundamental quantity, the user is often interested in posterior
expectations of various structural features f (A). For example, f (A) can be the indicator function of some particular arc
of interest, evaluating to 1 if the arc is present in A, and to 0
otherwise [Friedman and Koller, 2003].
It is common
to assign a modular prior, that is, p(A) ∝
q(A) = v qv (Av ) for some nonnegative functions qv . For
instance, the uniform prior on DAGs is obtained by setting
simply qv (Av ) ≡ 1. Often the support of the prior is restricted to DAGs in which the indegree of every node is at
most some constant k, that is, qv (Av ) = 0 when |Av | > k.
Motivated by computational issues, Friedman and Koller
[2003] introduced another class of priors, in which the model
is augmented with a new variable, a linear order on the nodes,
L ⊆ N × N , or node ordering less formally. We call a linear order L an extension of A if A ⊆ L. Now, we assign
a joint prior p(A, L) that vanishes whenever A ⊆ L, and
p(A, L) ∝ q(A)ρ(L) otherwise, where q(A) is as before and
ρ(L) is some nonnegative function; in the sequel, we take
simply ρ(L) ≡ 1. The motivation of this construction stems
from the factorization
p(A|L)p(D|A)
p(D|L) =
Preliminaries
We begin by describing the structure learning problem,
mostly adopting the notation of Niinimäki et al. [2011].
We then briefly review Friedman and Koller’s [2003] orderMCMC method and extend it based on Geyer’s [1991]
Metropolis-coupled MCMC (MC3 ). In our experiments, reported in Section 3, we use MC3 as a proxy of a related implementation1 by Ellis and Wong [2008]. We also discuss the
possible drawbacks of Ellis and Wong’s [2008] heuristic for
correcting the bias of order-MCMC.
2.1
A
∝
qv (Av )p(Dv |DAv , Av ) ,
(1)
v Av ⊆Lv
Structure Learning in Bayesian Networks
where Lv = {u ∈ N : uv ∈ L} is the set of nodes that precede v in the order. By modeling different node orderings as
mutually exclusive events, the factorization enables efficient
treatment of DAGs via node orderings. A drawback of this
augmentation is, however, that it introduces a systematic bias
A Bayesian network (BN) represents a joint distribution of
a vector of random variables D = (D1 , . . . , Dn ) in terms
1
The software used by Ellis and Wong [2008] is not publicly
available at the moment (W.H. Wong, personal discussion).
1580
from the simpler modular prior on DAGs. Namely, letting
(A) denote the
number of linear extensions of A, we have
p(A) ∝ q(A) L⊇A ρ(L) = q(A)(A). That is, the prior
is biased due to the extra factor (A), which is reflected also
in the posterior; for more thorough discussions, see the references [Friedman and Koller, 2003; Koivisto and Sood, 2004;
Eaton and Murphy, 2007; Ellis and Wong, 2008].
2.2
posterior, it may fail in other typical cases. To see this, consider what happens when = 0 and one samples only a
single order L. Then, a calculation shows that the expected
value of the “corrected” estimator forthe posterior expectation of f (A) is still proportional to A f (A)p(A|D)(A),
thus unchanged and biased. For another example, consider
a scenario where the posterior probability is 1/2 for a special DAG A0 and 1/(2M ) for some other M DAGs. Assume also that f (A0 ) = 1 and f (A) = 0 for A = A0 ,
and that every DAG in question has exactly one linear extension. Now, suppose T = M DAGs are sampled, again
with = 0. Then, with high probability, nearly one half of
the DAGs equal A0 the rest T /2 being unique. Since only
unique DAGs are kept
for the estimator, the corrected estimate is about (1/2) (1/2 + T /(4M )) = 2/3, whereas the
correct value is 1/2. Taking fewer samples rapidly worsens
the situation. A further concern with the heuristic is its computational requirements when the number of nodes is large,
say 25 or larger, but the number of data points is small: the
posterior is flat, and consequently, a very large number of
DAGs need to be sampled from each order to gather the required mass of 1 − . (We note that Ellis and Wong [2008]
limit their experiments to instances of at most 14 nodes and
at least 100 data points.)
Order-MCMC and Correction
Friedman and Koller’s [2003] order-MCMC samples first
node orderings and then DAGs that are compatible with the
sampled orderings:
1. Sample node orderings along a Markov chain. Start
from a random node ordering. To move, propose the
swapping of the positions of two random nodes in the
current order. Accept the proposal according to the
Metropolis–Hastings ratio, such that the stationary distribution of the resulting Markov chain is the posterior
of node orderings. Evaluate the posterior probability
of a node ordering efficiently using the factorization
(1). The accepted states yield a sample of node orderings, L(1) , L(2) , . . . , L(T ) , possibly after thinning and
discarding some burn-in period.
2. Sample DAGs from the sampled orders. For each sampled node ordering L, generate a DAG compatible with
the order from the posterior distribution p(A|L, D).
Again this can be done efficiently by exploiting the independence of the parent sets Av given the order L. This
produces a sample of DAGs A(1) , A(2) , . . . , A(T ) .
2.3
MC3
Extending order-MCMC with tempering techniques can yield
still better mixing and also a good estimator for the marginal
likelihood p(D). Here we consider one such technique,
Metropolis-coupled MCMC (MC3 ) [Geyer, 1991]. In MC3
several Markov chains, indexed by 0, 1, . . . , r, are simulated
in parallel, each chain i having its own stationary distribution
pi . The idea is to take p0 as a “hot” distribution, e.g., the uniform distribution, and then let the pi be increasingly “cooler”
and closer approximations of the posterior p, putting finally
pr = p. Usually, powering schemes of the form
If the feature of interest f is modular, i.e., f (A) =
v fv (Av ), then an estimate for the posterior expectation
of f(t)isobtained using only the sampled orderings, as
t f (L ) T , where f (L) denotes the posterior expectation
of f (A) under the constraint A ⊆ L, that is, f (L) =
A f (A)p(A|D, L). This, again, can be evaluated relatively
fast for any given L due to a factorization similar to (1). For
non-modular features,
DAGs are used, the esti sampled
the
mate being simply t f A(t) T .
In principle, the bias due to favoring DAGs that have many
linear extensions can be corrected by simple reweighting. The
bias is removed in the estimate
f A(t) 1
.
(t)
A
A(t)
t
t
pi ∝ pβi ,
0 ≤ β 0 < β 1 < . . . < βr = 1
are used. For instance, Geyer and Thompson [1995] suggest
harmonic stepping, βi = 1/(r +1−i); in our experiments we
have used linear stepping, βi = i/r. In addition to running
the chains in parallel, every now and then we propose a swap
of the states Li and Lj of two randomly chosen chains i and
j = i + 1. The proposal is accepted with probability
pi (Lj )pj (Li )
.
min 1,
pi (Li )pj (Lj )
A difficulty here is, however, that computing (A) for a given
].
DAG A is #P-hard in general [Brightwell and Winkler,
1991
To circumvent the computation of the terms A(t) , Ellis and Wong [2008] proposed the following heuristic: From
each unique sampled order L, sample a set of unique DAGs
such that their total posterior mass, conditionally on L, is at
least 1 − . Let U be the union of all the DAGs so obtained,
over all the sampled orders L. Treat U as an importanceweighted sample,
in which the weight of a DAG A is given
by p(A)
A∈U p(A).
While this heuristic corrects the bias reliably when the
sampled orders and DAGs cover nearly all the mass of the
We note that each pi needs to be known only up to some constant factor, that is, we can efficiently evaluate a function gi
that is proportional to pi . We denote by Zi the normalization
constant gi /pi .
Having T samples from each chain, the ratio Zr /Z0 can be
estimated by the telescoping product of the estimates
(t) Zi
1 (t) ≈
gi Li−1 gi−1 Li−1 , i = 1, . . . , r .
Zi−1
T t
When p0 is taken as the uniform distribution, the constant Z0
is known or easy to estimate, and so an estimate of the ratio
Zr /Z0 gives us an estimate of the marginal likelihood p(D).
1581
3
Since sampling a single order L(t) is relatively expensive,
it is often advisable to draw several DAGs per sampled order, to reduce the variance of the estimator. If two DAGs,
A(t1 ) and A(t1 ) are generated from the same order L(t) , the
associated terms in the above sums share the weight w(t) are
no longer independent random variables. However, while this
will change the variance of the respective estimators, their expectations remain unchanged. What is a reasonable number
of DAGs per order, depends on the complexity of evaluating
the term (A(t) ); we consider this issue next.
AIS on Node Orderings
We next describe our application of the AIS method, our approach to correct the bias by explicitly counting the linear
extensions of a given DAG, and the lower bounding method
based on Markov’s inequality. We also include experimental
results on a few selected data sets.
3.1
Sampling Node Orderings
AIS produces a sample of linear orders L(1) , . . . , L(T ) , and
corresponding importance weights w(1) , . . . , w(T ) . Like in
MC3 , a sequence of distributions p0 , p1 , . . . , pr are introduced, such that sampling from p0 is easy, and as i increases,
the distributions pi provide gradually improving approximations to the posterior distribution p, until finally pr equals p.
For each pi we assume the availability of a corresponding
function gi that is proportional to pi and that can be evaluated fast at any given point. To sample L(t) , we first sample a
sequence of linear orders, L0 , L1 , . . . , Lr−1 along a Markov
chain, starting from p0 and moving according to suitably defined transition kernels τi , as follows:
3.3
To count the linear extensions of a DAG A ⊆ N ×N , we turn
to the corresponding partial order P (A) on N , obtained from
A by adding the loops vv for each v ∈ N (making the relation
reflexive) and then taking the transitive closure (making the
relation transitive). Clearly, A and P (A) have the same linear extensions. Since the transitive closure P (A) of a given
A can be computed efficiently (e.g., in O(n3 ) time using the
Floyd–Warshall algorithm), it suffices to consider the problem of counting the linear extensions of a given partial order.
It is easy to see that the number of linear extensions of a
partial order P on set S satisfies the recurrence
(P ) =
(P − v) ,
Generate L0 from p0 .
Generate L1 from L0 using τ1 .
..
.
Generate Lr−1 from Lr−2 using τr−1 .
v is maximal in P
with (∅) = 1, where P − v is the partial order on S \ {v}
obtained from P by deleting all pairs that mention v. This
recurrence immediately suggests a dynamic programming algorithm that tabulates the number of linear extensions for all
subsets that are downward closed with respect to the partial
order, known as the downsets or ideals of the partial order.
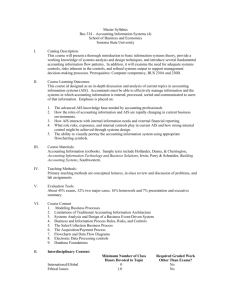
A straightforward implementation runs in time that scales
as n2 I(P ), where I(P ) is the number of ideals of P . We
have further reduced the time requirement to O(nI(P )) by
implementing an efficient way to maintain the set of maximal
elements while traversing through the ideals. Since I(P ) is
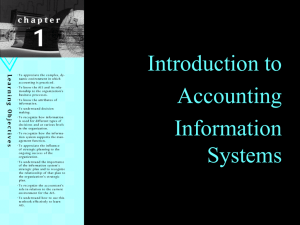
typically much less than its worst-case bound 2n , our implementation scales well up to around 40-element instances even
if the DAG underlying the partial order is relatively sparse;
see Figure 1. The bottleneck of the implentation is in fact the
space requirement which grows roughly as I(P ).
The transition kernels τi are constructed by a simple
Metropolis move: at state Li−1 a new state L is proposed
by swapping the positions of two random nodes in the order; the proposal
is accepted as the state Li with proba
bility min 1, gi (L )/gi (Li−1 ) , and otherwise Li is set to
Li−1 . It follows that τi leaves pi invariant. Finally, we set
L(t) = Lr−1 and assign the importance weight as
gr (Lr−1 )
g1 (L0 ) g2 (L1 )
···
.
w(t) =
g0 (L0 ) g1 (L1 )
gr−1 (Lr−1 )
Such a weighted sample in hand, the ratio of the normalization constants Z= gr /p
and Z0 = g0 /p0 can be estimated by Z/Z0 ≈ t w(t) T . Likewise, the expectation of
a function
f with respect
to(t)the posterior p can be estimated
by t w(t) f L(t)
t w . That these estimators are well
justified, follows directly from Neal’s argumentation [2001].
3.2
Counting Linear Extensions
3.4
Sampling DAGs and Correcting the Bias
Lower Bounding
We will use the following elementary but useful consequence
of Markov’s inequality; for a proof and variations, see the
works of Gomes et al. [2007] and Gogate and Dechter [2011].
Theorem 1. Let X1 , X2 , . . . , Xs be independent nonnegative random variables with mean μ. Let 0 < δ < 1. Then,
with probability at least 1 − δ,
Similar to order-MCMC, sampling DAGs from the sampled
node orderings enables posterior inference for nonmodular
features and a way to correct the bias. Specifically, if A(t) is
a sample from the posterior distribution of DAGs compatible
with a node ordering L(t) , then we see that the corrected importance sampling estimate for the posterior expectation of f
takes the form
w(t) f A(t) w(t)
.
A(t)
A(t)
t
t
δ 1/s min{X1 , X2 , . . . , Xs } ≤ μ .
For example, at confidence 0.95 = 1 − δ, a lower bound
is obtained by taking the minimum over s = 5 samples and
multiplying it by 0.051/5 ≈ 0.55, or by taking the minimum
over s = 30 samples and multiplying it by 0.051/30 ≈ 0.90.
In our experiments we have applied this idea to lower
bound the marginal likelihood p(D) as follows: The T samples generated by AIS are partitioned into s = 9 bins. For the
Likewise, the corrected estimate for the ratio Z/Z0 becomes
1 w(t)
.
T t A(t)
1582
200 hours of running time, we measured the performance of
the corresponding estimators throughout the process. Consequently, at any given time budget samplers with larger r
yielded respectively fewer samples. For each run of MC3 ,
we and included every 100th (M USHROOM and A LARM) or
10th (P ROMOTERS) simulated states in the sample. The first
half of the samples were discarded as burn-in. From each
sampled node ordering a single DAG was generated for bias
correction, except for AIS on M USHROOM we generated 10
DAGs per node ordering to balance the time requirements of
sampling and counting linear extensions.
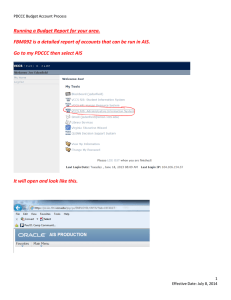
We first studied the performance of AIS and MC3 in estimating the marginal likelihood (Figure 2). We observed that
all the six samplers typically produced a good estimate, the
larger number of steps paying off when given sufficiently long
running time. An exception is the MC3 sampler with r = 4 on
M USHROOM. We also observed that, for M USHROOM, AIS
(e.g., with r = 4nm steps) finally yields a lower bound that is
within a factor of about 2 of the exact value. For A LARM and
P ROMOTERS the lower bounds are even better (compared to
the median estimate); in fact, they are nearly as good as they
can get by taking the minimum over 9 estimates, which necessarily implies an error of at least ln 0.7168 ≈ −0.33 in the
logarithm of the marginal likelihood.
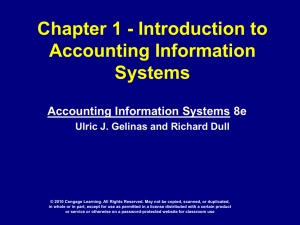
We then investigated the performance of the proposed biascorrected estimators (Figure 3, left). (Here we do not have
results for P ROMOTERS, as the number of nodes, 58, turned
out to be too large for counting the linear extensions, given the
small maximum indegree of 3.) We found moderate increase
in the variance of the estimates, compared to the case of not
correcting the bias. The lower bounds were now within a
factor of about 2 and 3 of the median estimate over 9 runs,
for M USHROOM and A LARM, respectively.
Finally, we compared the performance of AIS and MC3
with and without bias correction in estimating the arc posterior probabilities (Figure 3, right). We include results only
for M USHROOM, for which the exact values are available, and
only for the best choice of the number of annealing steps r.
We measured the performance of a single run by the largest
absolute error over all possible arcs. We observed that bias
correction does not significantly worsen the accuracy of the
estimates. We also observed that while MC3 is somewhat
more efficient than AIS, the M USHROOM data set presents a
difficult challenge for all the methods studied here.
4
10
max indegree 3
max indegree 6
3
10
2
time (s)
10
1
10
0
10
−1
10
−2
10
20
30
40
number of nodes
50
60
Figure 1: Speed of exact counting of linear extensions. For
each number of nodes, the runtime (in seconds) is shown for
9 random DAGs, with the maximum indegree set to 3 or 6.
Runtimes less than 0.01 seconds are rounded up to 0.01. The
mean of the runtimes is shown by a solid line. No runtime
estimates are shown when the memory requirement exceeded
16GB for at least one of the 9 DAGs.
jth bin, let Xj be the corresponding average of T /9 weights
w(t) . By Theorem 1, the minimum over the Xj multiplied by
0.051/9 ≈ 0.7168 is a lower bound of p(D)/Z0 with probability at least 0.95. (We will ignore the term Z0 as it depends
on neither the data nor the prior, except for the maximum
indegree, and it could be evaluated, e.g., using Robinson’s
[1973] recurrences.)
3.5
Experimental Results
We have experimented on three data sets. Our A LARM data
set contains 100 data records generated from the 37-variable
Alarm network. Mushroom is frequently used a 22-variable
data set of 8124 records, of which we included a random
subset of size 1000 to our M USHROOM data set. P ROMOTERS is another benchmark data set, consisting of 58 variables
and 106 records. See the references [Beinlich et al., 1989;
Blake and Merz, 1998] for more about these data sources.
We specified the Bayesian model in a usual manner. For
p(D|A) we used the BDeu scoring. We set qv (Av ) ≡ 1 for
the modular part, and ρ(L) ≡ 1 for the term concerning node
orderings. The maximum indegree parameter k was set to
4 for M USHROOM and to 3 for A LARM and P ROMOTERS.
For M USHROOM we used exact algorithms [Koivisto, 2006;
Tian and He, 2009] to compute the correct arc posterior probabilities, and for the biased prior, also the marginal likelihood.
For a fair comparison of AIS and MC3 , we fixed or varied
the free parameters as follows: For both methods, we used
linear stepping in the annealing scheme. (We experimented
also with other schemes, but the linear one achieved the most
robust performance across the data sets and repeated runs.)
However, the number of steps was varied: for MC3 we put
r = 4, 16, 64; for AIS we put r = nm, 4nm, 16nm, thus depending on the data size. These choices reflect the fact that in
MC3 it is crucial to simulate each parallel chain a large number of steps to get sufficient mixing and convergence, whereas
in AIS it is crucial to simulate the annealed chain a large number of steps. While we gave each of the six samplers roughly
4
Conclusions and Future Work
We have contributed two new ideas to structure learning
in Bayesian networks: (1) the use of Neal’s [2001] annealed importance sampling (AIS) method to obtain independent samples with known expected value, and (2) the use
of moderately-exponential-time dynamic programming algorithms to correct the bias due to sampling node orderings. By
comparing to an advanced MCMC technique, MC3 , we have
shown that the efficiency of AIS in exploring the posterior
is competitive—AIS does not sacrifice accuracy for its other
advantages. We next discuss to what extent our present implementation satisfies the three desiderata that motivated this
work, and what are the future prospects in this regard.
1583
A LARM (n = 37, m = 100)
−10945
−10946
−10947
−10948
AIS: 22000
AIS: 88000
AIS: 352000
AISL: 88000
MC3: 4
MC3: 16
MC3: 64
ln of marginal likelihood estimate
ln of marginal likelihood estimate
−10944
−10949
−10950
−10951
−10952
3
10
4
5
10
−1247
−8437
−1248
−8438
−1249
−1250
−1251
10
AIS: 3700
AIS: 14800
AIS: 59200
AISL: 14800
MC3: 4
MC3: 16
MC3: 64
−1252
−1253
−1254
−1255
2
10
6
10
P ROMOTERS (n = 58, m = 106)
ln of marginal likelihood estimate
M USHROOM (n = 22, m = 1000)
3
10
time (s)
4
10
time (s)
5
10
−8439
−8440
−8441
−8443
−8444
−8445
6
AIS: 6148
AIS: 24592
AIS: 98368
AISL: 24592
MC3: 4
MC3: 16
MC3: 64
−8442
10
2
10
4
6
10
time (s)
10
Figure 2: Performance of AIS and MC3 in estimating the marginal likelihood, without bias correction. For each of the six
samplers, the median (of 9 runs) of the estimates is shown as a function of running time. In addition, a 0.95-confidence lower
bound based on AIS with the medium number of steps is shown (“AISL”). For M USHROOM the correct value is shown by a
horizontal line. The legend shows the number of annealing steps r.
M USHROOM (n = 22, m = 1000)
A LARM (n = 37, m = 100)
−10966
−10967
−10968
−10969
cAIS: 22000
cAIS: 88000
cAIS: 352000
cAISL: 88000
−10970
−10971
4
5
10
10
6
10
−1299
−1300
cAIS: 3700
cAIS: 14800
cAIS: 59200
cAISL: 14800
median of largest absolute error
−10965
−10972
3
10
1
−1298
ln of marginal likelihood estimate
ln of marginal likelihood estimate
−10964
M USHROOM (n = 22, m = 1000)
−1301
−1302
−1303
−1304
−1305
−1306
2
10
3
10
time (s)
4
10
time (s)
5
10
6
10
AIS: 88000
MC3: 16
cAIS: 88000
cMC3: 16
0.8
0.6
0.4
0.2
0
2
10
3
10
4
10
time (s)
5
10
6
10
Figure 3: Left: Performance of AIS in estimating the marginal likelihood, with bias correction. For each sampler, the median (of
9 runs) of the estimates is shown as a function of running time. In addition, a 0.95-confidence lower bound based on AIS with
the medium number of steps is shown (“cAISL”). The legend shows the number of annealing steps r. Rightmost: Performance
of AIS and MC3 in estimating the arc posterior probabilities, with and without bias correction. For each sampler, the median
(of 9 runs) of the largest absolute error over all possible arcs is shown as a function of running time.
Bias correction. We implemented a direct way to correct
the bias by explicitly counting the linear extensions of each
sampled DAG. The main advantage of this approach is that
it yields a weighting that provably corrects the bias. We
showed that the #P-hardness of the problem does not render
it intractable in practice, as long as the number of nodes is
at most about 40—this is much beyond the scope of the existing dynamic programming algorithms for structure learning [Koivisto, 2006; Eaton and Murphy, 2007; Tian and He,
2009]. A topic of future research is to improve the exact algorithm further and to explore the practical value of the existing
polynomial-time approximation schemes [Dyer et al., 1991;
Karzanov and Khachiyan, 1991; Huber, 2006].
AIS the bottleneck is the complexity of simulating the annealing process to get a single sample. As it is vital to keep
the number of simulation steps large, the hope for scalability
to larger instances is in developing significantly faster algorithms for evaluating a given node ordering. Our current implementation can be boosted by an order of magnitude by incorporating some of the tricks of Friedman and Koller [2003].
Guarantees. We showed that AIS supplies an importance
sampling distribution that enables lower-bounding of the
marginal likelihood of the model with fairly good probabilistic guarantees. In obtaining quality guarantees for samplingbased estimates more generally, our success is, admittedly,
only partial so far. Most importantly, we currently do not
obtain useful lower (or upper) bounds for the posterior probabilities of individual arcs or larger subgraph, since we do not
have useful upper bound for the involved normalization constant, that is, the marginal likelihood. In this light, the key
topic of future research is to find efficient methods for upperbounding the marginal likelihood.
Parallelization. A main advantage of AIS over MCMC is
that AIS enables easy large-scale parallelization. There do exist parallel implementations of MCMC [Altekar et al., 2004;
Corander et al., 2008], which rely on frequent synchronized
communication. They are thus only suited for architectures
with shared memory and some tens of parallel processes. In
1584
References
[Gomes et al., 2007] C. P. Gomes, J. Hoffmann, A. Sabharwal, and
B. Selman. From sampling to model counting. In M. M. Veloso,
editor, IJCAI, pages 2293–2299, 2007.
[Grzegorczyk and Husmeier, 2008] M. Grzegorczyk and D. Husmeier. Improving the structure MCMC sampler for Bayesian
networks by introducing a new edge reversal move. Machine
Learning, 71(2-3):265–305, 2008.
[Heckerman et al., 1995] D. Heckerman, D. Geiger, and D. M.
Chickering. Learning Bayesian networks: The combination of
knowledge and statistical data. Machine Learning, 20:197–243,
1995.
[Huber, 2006] M. Huber. Fast perfect sampling from linear extensions. Discrete Mathematics, 306(4):420–428, 2006.
[Karzanov and Khachiyan, 1991] A. Karzanov and L. Khachiyan.
On the conductance of order Markov chains. Order, 8:7–15,
1991.
[Koivisto and Sood, 2004] M. Koivisto and K. Sood.
Exact
Bayesian structure discovery in Bayesian networks. Journal of
Machine Learning Research, 5:549–573, 2004.
[Koivisto, 2006] M. Koivisto. Advances in exact Bayesian structure
discovery in Bayesian networks. In UAI, pages 241–248. AUAI,
2006.
[Madigan and York, 1995] D. Madigan and J. York. Bayesian
graphical models for discrete data. International Statistical Review, 63:215–232, 1995.
[Neal, 2001] R. M. Neal. Annealed importance sampling. Statistics
and Computing, 11:125–139, 2001.
[Niinimaki et al., 2011] T. Niinimaki, P. Parviainen, and
M. Koivisto. Partial order MCMC for structure discovery
in Bayesian networks. In F. G. Cozman and A. Pfeffer, editors,
UAI, pages 557–564. AUAI, 2011.
[Parr and van der Gaag, 2007] R. Parr and L.-C. van der Gaag, editors. UAI 2007, Proceedings of the Twenty-Third Conference
on Uncertainty in Artificial Intelligence, Vancouver, BC, Canada,
July 19-22, 2007. AUAI Press, 2007.
[Pearl, 1988] J. Pearl. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference. Morgan Kaufmann, San
Francisco, 1988.
[Pearl, 2000] J. Pearl. Causality: Models, Reasoning, and Inference. Cambridge University Press, Cambridge, 2000.
[Robinson, 1973] R. W. Robinson. Counting labeled acyclic digraphs. In F. Harary, editor, New Directions in Graph Theory.
Academic Press, 1973.
[Tian and He, 2009] J. Tian and R. He. Computing posterior probabilities of structural features in Bayesian networks. In J. Bilmes
and A. Y. Ng, editors, UAI, pages 538–547. AUAI, 2009.
[Altekar et al., 2004] G. Altekar, S. Dwarkadas, J. P. Huelsenbeck,
and F. Ronquist. Parallel Metropolis coupled Markov chain
Monte Carlo for Bayesian phylogenetic inference. Bioinformatics, 20:407–415, 2004.
[Battle et al., 2010] A. J. Battle, M. Jonikas, P. Walter, J. Weissman, and D. Koller. Automated identification of pathways from
quantitative genetic interaction data. Molecular Systems Biology,
6:379–391, June 2010.
[Beinlich et al., 1989] I. Beinlich, G. Suermondt, R. Chavez, and
G. F. Cooper. The ALARM monitoring system. In Proc. of
the Second European Conference on Artificial Intelligence and
Medicine, pages 247–256, 1989.
[Blake and Merz, 1998] C. L. Blake and C. J. Merz. UCI repository
of machine learning databases, 1998.
[Brightwell and Winkler, 1991] G. Brightwell and P. Winkler.
Counting linear extensions. Order, 8:225–242, 1991.
[Buntine, 1991] W. Buntine. Theory refinement on Bayesian networks. In B. D’Ambrosio and P. Smets, editors, UAI, pages 52–
60. Morgan Kaufmann, 1991.
[Cappé and Robert, 2000] O. Cappé and C. P. Robert. Markov
chain Monte Carlo: 10 years and still running! Journal of the
American Statistical Association, 95:1282–1286, 2000.
[Cooper and Herskovits, 1992] G. F. Cooper and E. Herskovits. A
Bayesian method for the induction of probabilistic networks from
data. Machine Learning, 9:309–347, 1992.
[Corander et al., 2008] J. Corander, M. Ekdahl, and T. Koski. Parallel interacting MCMC for learning of topologies of graphical
models. Data Min. Knowl. Discov., 17(3):431–456, 2008.
[Diaconis, 2009] P. Diaconis. The Markov chain Monte Carlo revolution. Bull. Amer. Soc., 46(2):179–205, 2009.
[Dyer et al., 1991] M. E. Dyer, A. M. Frieze, and R. Kannan. A
random polynomial time algorithm for approximating the volume
of convex bodies. J. ACM, 38(1):1–17, 1991.
[Eaton and Murphy, 2007] D. Eaton and K. P. Murphy. Bayesian
structure learning using dynamic programming and MCMC. In
Parr and van der Gaag [2007], pages 101–108.
[Ellis and Wong, 2008] B. Ellis and W. H. Wong. Learning causal
Bayesian network structures from experimental data. Journal of
the American Statistical Association, 103:778–789, 2008.
[Friedman and Koller, 2003] N. Friedman and D. Koller. Being
Bayesian about network structure: A Bayesian approach to structure discovery in Bayesian networks. Machine Learning, 50:95–
125, 2003.
[Geyer and Thompson, 1995] C. J. Geyer and E. A. Thompson. Annealing Markov chain Monte Carlo with application to ancestral inference. Journal of the American Statistical Association,
90:909–920, 1995.
[Geyer, 1991] C. J. Geyer. Markov chain Monte Carlo maximum
likelihood. In E. M. Keramidas, editor, 23rd Symposium on Interface, pages 156–163, Fairfax Station: Interface Foundation,
1991.
[Gogate and Dechter, 2011] V. Gogate and R. Dechter. Samplingbased lower bounds for counting queries. Intelligenza Artificiale,
5(2):171–188, 2011.
[Gogate et al., 2007] V. Gogate, B. Bidyuk, and R. Dechter. Studies
in lower bounding probabilities of evidence using the Markov
inequality. In Parr and van der Gaag [2007], pages 141–148.
1585