Proceedings of the Twenty-Fifth AAAI Conference on Artificial Intelligence
Preferred Explanations: Theory and Generation via Planning
Shirin Sohrabi
Jorge A. Baier
Sheila A. McIlraith
Department of Computer Science
University of Toronto
Toronto, Canada
Depto. de Ciencia de la Computación
Pontificia Universidad Católica de Chile
Santiago, Chile
Department of Computer Science
University of Toronto
Toronto, Canada
Here we conceive the computational core underlying explanation generation of dynamical systems as a nonclassical
planning task. Our focus in this paper is with the generation of preferred explanations – how to specify preference
criteria, and how to compute preferred explanations using
planning technology. Most explanation generation tasks that
distinguish a subset of preferred explanations appeal to some
form of domain-independent criteria such as minimality or
simplicity. Domain-specific knowledge has been extensively
studied within the static-system explanation and abduction
literature as well as in the literature on specific applications
such as diagnosis. Such domain-specific criteria often employ probabilistic information, or in its absence default logic
of some notion of specificity (e.g., Brewka 1994).
In 2010, we examined the problem of diagnosis of discrete dynamical systems (a task within the family of explanation generation tasks), exploiting planning technology to
compute diagnoses and suggesting the potential of planning
preference languages as a means of specifying preferred diagnoses (Sohrabi, Baier, and McIlraith 2010). Building on
our previous work, in this paper we explicitly examine the
use of preference languages for the broader task of explanation generation. In doing so, we identify a number of
somewhat unique representational needs. Key among these
is the need to talk about the past (e.g., “If I observe that my
car has a flat tire then I prefer explanations where my tire
was previously punctured.”) and the need to encode complex observation patterns (e.g., “My brakes have been failing intermittently.”) and how these patterns relate to possible explanations. To address these requirements we specify
preferences in Past Linear Temporal Logic (P LTL), a superset of Linear Temporal Logic (LTL) that is augmented with
modalities that reference the past. We define a finite variant of P LTL, f-P LTL, that is augmented to include action
occurrences.
Motivated by a desire to generate explanations using
state-of-the-art planning technology, we propose a means
of compiling our f-P LTL preferences into the syntax of
PDDL3, the Planning Domain Description Language 3 that
supports the representation of temporally extended preferences (Gerevini et al. 2009). Although, f-P LTL is more
expressive than the preference subset of PDDL3 (e.g., fP LTL has action occurrences and arbitrary nesting of temporal modalities), our compilation preserves the f-P LTL se-
Abstract
In this paper we examine the general problem of generating
preferred explanations for observed behavior with respect to
a model of the behavior of a dynamical system. This problem arises in a diversity of applications including diagnosis
of dynamical systems and activity recognition. We provide a
logical characterization of the notion of an explanation. To
generate explanations we identify and exploit a correspondence between explanation generation and planning. The determination of good explanations requires additional domainspecific knowledge which we represent as preferences over
explanations. The nature of explanations requires us to formulate preferences in a somewhat retrodictive fashion by utilizing Past Linear Temporal Logic. We propose methods
for exploiting these somewhat unique preferences effectively
within state-of-the-art planners and illustrate the feasibility of
generating (preferred) explanations via planning.
Introduction
In recent years, planning technology has been explored as
a computational framework for a diversity of applications.
One such class of applications is the class that corresponds
to explanation generation tasks. These include narrative understanding, plan recognition (Ramı́rez and Geffner 2009),
finding excuses (Göbelbecker et al. 2010), and diagnosis
(e.g., Sohrabi, Baier, and McIlraith 2010; Grastien et al.
2007).1 While these tasks differ, they share a common computational core, calling upon a dynamical system model to
account for system behavior, observed over a period of time.
The observations may be over aspects of the state of the
world, or over the occurrence of events; the account typically takes the form of a set or sequence of actions and/or
state that is extracted from the construction of a plan that
embodies the observations. For example, in the case of diagnosis, the observations might be of the, possibly aberrant,
behavior of an electromechanical device over a period of
time, and the explanation a sequence of actions that conjecture faulty events. In the case of plan recognition, the
observations might be of the actions of an agent, and the explanation a plan that captures what the agent is doing and/or
the final goal of that plan.
c 2011, Association for the Advancement of Artificial
Copyright Intelligence (www.aaai.org). All rights reserved.
1
(Grastien et al. 2007) characterized diagnosis in terms of SAT
but employed a planning-inspired encoding.
261
mantics while conforming to PDDL3 syntax. This enables
us to exploit PDDL3-compliant preference-based planners
for the purposes of generating preferred explanations. We
also propose a further compilation to remove all temporal
modalities from the syntax of our preferences (while preserving their semantics) enabling the exploitation of costbased planners for computing preferred explanations. Additionally, we exploit the fact that observations are known
a priori to pre-process our suite of explanation preferences
prior to explanation generation in a way that further simplifies the preferences and their exploitation. We show that
this compilation significantly improves the time required to
find preferred explanations, sometimes by orders of magnitude. Experiments illustrate the feasibility of generating
(preferred) explanations via planning.
Past LTL with Action Occurrences
Past modalities have been exploited for a variety of specialized verification tasks and it is well established that LTL
augmented with such modalities has the same expressive
power as LTL restricted to future modalities (Gabbay 1987).
Nevertheless, certain properties (including fault models and
explanation models) are more naturally specified and read
in this augmentation of LTL. For example specifying that
every alarm is due to a fault can easily be expressed by
2(alarm → f ault), where 2 means always and means
once in the past. Note that ¬U(¬f ault, (alarm ∧ ¬f ault))
is an equivalent formulation that uses only future modalities
but is much less intuitive. In what follows we define the
syntax and semantics of, f-P LTL, a variant of LTL that is
augmented with past modalities and action occurrences.
Explaining Observed Behavior
Syntax Given a set of fluent symbols F and a set of action
symbols A, the atomic formulae of the language are: either
a fluent symbol, or occ(a), for any a ∈ A. Non-atomic
formulae are constructed by applying negation, by applying a standard boolean connective to two formulae, or by
including the future temporal modalities “until” (U), “next”
(), “always”(2), and “eventually”(♦), or the past temporal modalities “since” (S), “yesterday” ( ), “always in the
past”(), and “eventually in the past”(). Future f-pLTL is
the subset of f-pLTL that contains all and only the formulae with no past temporal modalities. Past f-pLTL formulae
are defined analogously. A non-temporal formula does not
contain any temporal modalities.
In this section we provide a logical characterization of a preferred explanation for observed behavior with respect to a
model of a dynamical system. In what follows we define
each of the components of this characterization, culminating in our characterization of a preferred explanation.
•
Dynamical Systems
Dynamical systems can be formally described in many
ways. In this paper we assume a finite domain and model
dynamical systems as transition systems. For convenience,
we define transitions systems using a planning language. As
such transitions occur as the result of actions described in
terms of preconditions and effects. Formally, a dynamical
system is a tuple Σ = (F, A, I), where F is a finite set of
fluent symbols, A is a set of actions, and I is a set of clauses
over F that defines a set of possible initial states. Every action a ∈ A is defined by a precondition prec(a), which is
a conjunction of fluent literals, and a set of conditional effects of the form C → L, where C is a conjunction of fluent
literals and L is a fluent literal.
A system state s is a set of fluent symbols, which intuitively defines all that is true in a particular state of the dynamical system. For a system state s, we define Ms : F →
{true, f alse} as the truth assignment that assigns the truth
value true to f if f ∈ s, and assigns f alse to f otherwise. We say a state s is consistent with a set of clauses C, if
Ms |= c, for every c ∈ C. Given a state s consistent with I,
we denote Σ/s as the dynamical system (F, A, I/s), where
I/s stands for the set of unit clauses whose only model
is Ms . We say a dynamical system Σ = (F, A, I) has a
complete initial state iff there is a unique truth assignment
M : F → {true, f alse} such that M |= I.
We assume that an action a is executable in a state s if
Ms |= prec(a). If a is executable in a state s, we define
its successor state as δ(a, s) = (s \ Del) ∪ Add, where
Add contains a fluent f iff C → f is an effect of a and
Ms |= C. On the other hand Del contains a fluent f iff
C → ¬f is an effect of a, and Ms |= C. We define
δ(a0 a1 . . . an , s) = δ(a1 . . . an , δ(a0 , s)), and δ(, s) = s.
A sequence of actions α is executable in s if δ(α, s) is defined. Furthermore α is executable in Σ iff it is executable
in s, for any s consistent with I.
Semantics Given a system Σ, a sequence of actions α, and
an f-P LTL formula ϕ, the semantics defines when α satisfies
ϕ in Σ. Let s be a state and α = a0 a1 . . . an be a sequence
of actions. We say that σ is an execution trace of α in s iff
σ = s0 s1 s2 . . . sn+1 and δ(ai , si ) = si+1 , for any i ∈ [0, n].
Furthermore, if l is the sequence 0 1 . . . n , we abbreviate
its suffix i i+1 . . . n by li .
Definition 1 (Truth of an f-P LTL Formula) An f-P LTL
formula ϕ is satisfied by α in a dynamical system
Σ = (F, A, I) iff for any state s consistent with I, the
execution trace σ of α in s is such that σ, α |= ϕ, where 2
• σi , αi |= ϕ, where ϕ ∈ F iff ϕ is an element of the first
state of σi .
• σi , αi |= occ(a) iff i < |α| and ai is the first action of
αi .
• σi , αi |= ϕ iff i < |σ| − 1 and σi+1 , αi+1 |= ϕ
• σi , αi |= U(ϕ, ψ) iff there exists a j ∈ {i, ..., |σ| − 1}
such that σj , αj |= ψ and for every k ∈ {i, ..., j − 1},
σk , αk |= ϕ
• σi , αi |= ϕ iff i > 0 and σi−1 , αi−1 |= ϕ
• σi , αi |= S(ϕ, ψ) iff there exists a j ∈ {0, ..., i} such
that σj , αj |= ψ and for every k ∈ {j + 1, ..., i},
σk , αk |= ϕ
The semantics of other temporal modalities are defined in
def
def
terms of these basic elements, e.g., ϕ = ¬¬ϕ, ϕ =
def
S(true, ϕ), and ♦ϕ = U(true, ϕ).
•
2
262
We omit standard definitions for ¬, ∨.
A possible explanation (H, α),
is such that
H = {in(pkg, truck1 )}, and α is unload(pkg, loc1 ),
load(pkg, loc1 ), drive(loc1 , loc2 ), unload(pkg, loc2 ).
Note that aspects of H and α can be further filtered to
identify elements of interest to a particular user following
techniques such as those in (McGuinness et al. 2007).
Given a system and an observation, there are many possible explanations, not all of high quality. At a theoretical
level, one can assume a reflexive and transitive preference
relation between explanations. If E1 and E2 are explanations and E1 E2 we say that E1 is at least as preferred as
E2 . E1 ≺ E2 is an abbreviation for E1 E2 and E2 E1 .
Definition 3 (Optimal Explanation) Given a system Σ, E
is an optimal explanation for observation ϕ iff E is an explanation for ϕ and there does not exist another explanation
E for ϕ such that E ≺ E.
It is well recognized that some properties are more naturally expressed using past modalities. An additional property of such modalities is that they can construct formulae that are exponentially more succinct that their future
modality counterparts. Indeed let Σn be a system with
, . . . , pn }, let ψi = pi ↔ (¬ true ∧ pi ), and let
Fn = {p0
n
Ψ = 2 i=1 ψi → ψ0 . Intuitively, ψi expresses that “pi
has the same truth value now as it did in the initial state”.
Theorem 1 (Following Markey 2003) Any future formula
ψ, that is equivalent to Ψ (defined as above) has size
Ω(2|Ψ| ).
In the following sections we provide a translation of formulae with past modalities into future-only formulae, in order to use existing planning technology. Despite Markey’s
theorem, it is possible to show that the blowup for Ψ can
be avoided if one modifies the transition system to include
additional predicates that keep track of the initial truth value
of each of p0 , . . . , pn . Such a modification can be done in
linear time.
•
Complexity and Relationship to Planning
It is possible to establish a relationship between explanation
generation and planning. Before doing so, we give a formal
definition of planning.
A planning problem with temporally extended goals is a
tuple P = (Σ, G), where Σ is a dynamical system, and G is
a future f-P LTL goal formula. The sequence of actions α is
a plan for P if α is executable in Σ and α satisfies G in Σ.
A planning problem (Σ, G) is classical if Σ has a complete
initial state, and conformant otherwise.
The following is straightforward from the definition.
Proposition 1 Given a dynamical system Σ = (F, A, I)
and an observation formula ϕ, expressed in future f-P LTL,
then (H, α) is an explanation iff α is a plan for conformant
planning problem P = ((F, A, I ∪ H), ϕ) where I ∪ H is
satisfiable and where ϕ is a temporally extended goal.
In systems with complete initial states, the generation of
a single explanation corresponds to classical planning with
temporally extended goals.
Proposition 2 Given a dynamical system Σ such that Σ has
complete initial state, and an observation formula ϕ, expressed in future f-P LTL, then (∅, α) is an explanation iff
α is a plan for classical planning problem P = (Σ, ϕ) with
temporally extended goal ϕ.
Indeed, the complexity of explanation existence is the same
as that of classical planning.
Theorem 2 Given a system Σ and a temporally extended
formula ϕ, expressed in future f-P LTL, explanation existence is PSPACE-complete.
Proof sketch. For membership, we propose the following
NPSPACE algorithm: guess an explanation H such that I ∪H
has a unique model, then call a PSPACE algorithm (like
the one suggested by de Giacomo and Vardi (1999)) to decide (classical) plan existence. Then we use the fact that
NPSPACE=PSPACE. Hardness is given by Proposition 2
and the fact that classical planning is PSPACE-hard (Bylander 1994).
§
The proof of Theorem 2 appeals to a non-deterministic algorithm that provides no practical insight into how to translate plan generation into explanation generation. At a more
Characterizing Explanations
Given a description of the behavior of a dynamical system
and a set of observations about the state of the system and/or
action occurrences, we define an explanation to be a pairing
of actions, orderings, and possibly state that account for the
observations in the context of the system dynamics. The definitions in this section follow (but differ slightly from) the
definitions of dynamical diagnosis we proposed in (Sohrabi,
Baier, and McIlraith 2010), which in turn elaborate and extend previous work (e.g., McIlraith 1998; Iwan 2001).
Assuming our system behavior is defined as a dynamical system and that the observations are expressed in future
f-P LTL, we define an explanation as a tuple (H, α) where
H is a set of clauses representing an assumption about the
initial state and α is an executable sequence of actions that
makes the observations satisfiable. If the initial state is complete, then H is empty, by definition. In cases where we have
incomplete information about the initial state, H denotes assumptions that we make, either because we need to establish
the preconditions of actions we want to conjecture in our explanation or because we want to avoid conjecturing further
actions to establish necessary conditions. Whether it is better to conjecture more actions or to make an assumption is
dictated by domain-specific knowledge, which we will encode in preferences.
Definition 2 (Explanation) Given a dynamical system Σ =
(F, A, I), and an observation formula ϕ, expressed in future
f-P LTL, an explanation is a tuple (H, α), where H is a set
of clauses over F such that I ∪ H is satisfiable, I |= H, and
α is a sequence of actions in A such that α satisfies ϕ in the
system ΣA = (F, A, I ∪ H).
Example Assume a standard logistics domain with one
truck, one package, and in which all that is known initially
is that the truck is at loc1 . We observe pkg is unloaded from
truck1 in loc1 , and later it is observed that pkg is in loc2 .
One can express the observation as
♦[occ(unload(pkg, loc1 )) ∧ ♦at(pkg, loc2 )]
263
practical level, there exists a deterministic algorithm that
maps explanation generation to classical plan generation.
Theorem 3 Given an observation formula ϕ, expressed in
future f-P LTL, and a system Σ, there is an exponential-time
procedure to construct a classical planning problem P =
(Σ , ϕ) with temporally extended goal ϕ, such that if α is a
plan for P , then an explanation (H, α ) can be generated in
linear time from α.
Proof sketch. Σ , the dynamical system that describes P is
the same as Σ = (F, A, I), augmented with additional actions that “complete” the initial state. Essentially, each such
action generates a successor state s that is consistent with
I. There is an exponential number of them. If a0 a1 . . . an
is a plan for P , we construct the explanation (H, α ) as follows. H is constructed with the facts true in the state s that
§
a0 generates. α is set to a1 . . . an .
Preferred Explanations
A high quality explanation is determined by the optimization of an objective function. The PDDL3 metric function
we employ for this purpose is a weighted linear sum of formulae to be minimized. I.e., (minimize (+ (∗ w1 φ1 ) . . . (∗
wk φk ))) where each φi is a formula that evaluates to 0 or
1 depending on whether an associated preference formula,
a property of the explanation trajectory, is satisfied or violated; wi is a weight characterizing the importance of that
property (Gerevini et al. 2009). The key role of our preferences is to convey domain-specific knowledge regarding
the most preferred explanations for particular observations.
Such preferences take on the following canonical form.
Definition 4 (Explanation Preferences) 2(φobs → φexpl )
is an explanation preference formula where φobs , the observation formula, is any future f-P LTL formula, and φexpl ,
the explanation formula, is any past f-P LTL formula. Nontemporal expressions may appear in either formula.
An observation formula, φobs , can be as simple as the observation of a single fluent or action occurrence (e.g., my car
won’t start.), but it can also be a complex future f-P LTL. In
many explanation scenarios, observations describe a telltale
ordering of system properties or events that suggest a unique
explanation such as a car that won’t start every time it rains.
To simplify the description of observation formulae, we employ precedes as a syntactic constructor of observation patterns. ϕ1 precedes ϕ2 indicates that ϕ1 is observed before
ϕ2 . More generally, one can express ordering among observations by using formula of the form (ϕ1 precedes ϕ2 ...
precedes ϕn ) with the following interpretation:
All the previous results can be re-stated in a rather
straightforward way if the desired problem is to find an optimal explanation. In that case the reductions are made to
preference-based planning (Baier and McIlraith 2008).
The proofs of the theorems above unfortunately do not
provide a practical solution to the problem of (high-quality)
explanation generation. In particular, we have assumed that
planning problems contain temporally extended goals expresed in future f-P LTL. No state-of-the-art planner that we
are aware of supports these goals directly. We have not provided a compact and useful way to represent the relation.
Specifying Preferred Explanations
The specification of preferred explanations in dynamical settings presents a number of unique representational requirements. One such requirement is that preferences over explanations be contextualized with respect to observations,
and these observations themselves are not necessarily single
fluents, but rich temporally extended properties – sometimes
with characteristic forms and patterns. Another unique representational requirement is that the generation of explanations (and preferred explanations) necessitates reflecting on
the past. Given some observations over a period of time, we
wish to conjecture what preceded these observations in order to account for their occurrence. Such explanations may
include certain system state that explains the observations,
or it may include action occurrences. Explanations may also
include reasonable facts that we wish to posit about the initial state (e.g., that it’s below freezing outside – a common
precursor to a car battery being dead).
In response to the somewhat unique representational requirements, we express preferences in f-P LTL. In order to
generate explanations using state-of-the-art planners, an objective of our work was to make the preference input language PDDL3 compatible. However, f-P LTL is more expressive than the subset of LTL employed in PDDL3, and
we did not wish to lose this expressive power. In the next
section we show how to compile away some or all temporal
modalities by exploiting the correspondence between past
and future modalities and by exploiting the correspondence
between LTL and Büchi automata. In so doing we preserve
the expressiveness of f-P LTL within the syntax of PDDL3.
ϕ1 ∧ ♦(ϕ2 ∧ ♦(ϕ3 ...(ϕn−1 ∧ ♦ϕn )...))
(1)
Equations (2) and (3) illustrate the use of precedes to encode
a total (respectively, partial) ordering among observations.
These are two common forms of observation formulae.
(obs1 precedes obs2 precedes obs3 precedes obs4 )
(obs3 precedes obs4 ) ∧ (obs1 precedes obs2 )
(2)
(3)
Further characteristic observation patterns can also be
easily described using precedes. The following is an example of an intermittent fault.
(alarm precedes no alarm precedes alarm precedes no alarm)
Similarly, explanation formulae, φexp , can be complex
temporally extended formulae over action occurrences and
fluents. However, in practice these explanations may be reasonably simple assertions of properties or events that held
(resp. occurred) in the past. The following are some canonical forms of explanation formulae: (e1 ∧ ... ∧ en ), and
(e1 ⊗ ... ⊗ en ), where n ≥ 1, and ei is either a fluent ∈ F
or occ(a), a ∈ A and ⊗ is exclusive or.
Computing Preferred Explanations
In previous sections we addressed issues related to the specification and formal characterization of preferred explanations. In this section we examine how to effectively generate
explanations using state-of-the-art planning technology.
264
2(φobs → φexpl ), generating P3 . For every past explana-
Propositions 1 and 2 establish that we can generate explanations by treating an observation formula ϕ as the temporally extended goal of a conformant (resp. classical) planning problem. Preferred explanations can be similarly computed using preference-based planning techniques. To employ state-of-the-art planners, we must represent our observation formulae and the explanation preferences in syntactic forms that are compatible with some version of PDDL.
Both types of formulae are expressed in f-P LTL so PDDL3
is a natural choice since it supports preferences and some
LTL constructs. However, f-P LTL is more expressive than
PDDL3, supporting arbitrarily nested past and future temporal modalities, action occurrences, and most importantly
the next modality, , which is essential to the encoding of
an ordered set of properties or action occurrences that occur over time. As a consequence, partial- and total-order
observations are not expressible in PDDL3’s subset of LTL,
and so it follows that the precedes constructor commonly
used in the φobs component of explanation preferences is
not expressible in the PDDL3 LTL subset. There are similarly many typical φexpl formulae that cannot be expressed
directly in PDDL3 because of the necessity to nest temporal
modalities. So to generate explanations using planners, we
must devise other ways to encode our observation formulae
and our explanation preferences.
tion formula φexpl in Γ we do the following. We compute the
reverse of φexpl , φrexpl , as a formula just like φexpl but with
all past temporal operators changed to their future counterparts (i.e.,
by , by ♦, S by U). Note that φexpl is
satisfied in a trajectory of states σ iff φrexpl is satisfied in the
reverse of σ. Then, we use phase 1 of the BM compilation to
build a finite state automaton Aφrexpl for φrexpl . We now compute the reverse of Aφrexpl by switching accepting and initial
states and reversing the direction of all transitions. Then we
continue with phase 2 of the BM compilation, generating a
new planning problem for the reverse of Aφrexpl . In the resulting problem the new predicate acceptφexpl becomes true
as soon as the past formula φexpl is made true by the execution of an action sequence. We replace any occurrence of
φexpl in Γ by acceptφexpl . We similarly use the BM compilation to remove future temporal modalities from ϕ and
φobs . This is only necessary if they contain nested modalities or , which they often will. The output of this step is
PDDL3 compliant. To generate PDDL3 output without any
temporal operators, we perform the following further step.
Step 4 (optional) Compiles away temporal operators in Γ
and ϕ using the BM compilation, ending with simple preferences that refer only to the final state.
Theorem 4 Let P3 be defined as above for a description
Σ, an observation ϕ, and a set of preferences Γ. If α is
a plan for P3 with an associated metric function value M ,
then we can construct an explanation (H, α) for Σ and ϕ
with associated metric value M in linear time.
Although Step 4 is not required, it has practical value. Indeed, it enables potential application of other compilation
approaches that work directly with PDDL3 without temporal operators. For example, it enables the use of Keyder and
Geffner’s compilation (2009) to compile preferences into
corresponding actions costs so that standard cost-based planners can be used to find explanations. This is of practical
importance since cost-based planners are (currently) more
mature than PDDL3 preference-based planners.
•
Approach 1: PDDL3 via Compilation
Although it is not possible to express our preferences directly in PDDL3, it is possible to compile unsupported temporal formulae into other formulae that are expressible in
PDDL3. To translate to PDDL3, we utilize Baier and McIlraith’s future LTL compilation approach (2006), which we
henceforth refer to as the BM compilation. Given a future
LTL goal formula φ, and a planning problem P , the BM
compilation executes the following two steps: (phase 1) generates a finite state automaton for φ, and (phase 2) encodes
the automaton in the planning problem by adding new predicates to describe the changing configuration of the automaton as actions are performed. The result is a new planning
problem P that augments P with a newly introduced accepting predicate acceptφ that becomes true after performing a sequence of actions α in the initial state if and only
if α satisfies φ in P ’s dynamical system. Predicate acceptφ
is the (classical) goal in problem P . Below we introduce
an extension of the BM compilation that allows compiling
away past f-P LTL formulae.
Our compilation takes dynamical system Σ, an observation ϕ, a set Γ of formulae corresponding to explanation
preferences, and produces a PDDL3 planning problem.
Step 1 Takes Σ and ϕ and generates a classical planning
problem P1 with temporally extended goal ϕ using the procedure described in the proof for Theorem 3.
Step 2 Compiles away occ in P1 , generating P2 . For each
occurrence of occ(a) in Γ or ϕ, it generates an additional
fluent happeneda which is made true by a and is deleted by
all other actions. Replace occ(a) by happeneda in Γ and ϕ.
Step 3 Compiles away all the past elements of preferences
in Γ. It uses the BM compilation over P2 to compile away
past temporal operators in preference formulae of the form
Approach 2: Pre-processing (Sometimes)
The compiled planning problem resulting from the application of Approach 1 can be employed with a diversity of
planners to generate explanations. Unfortunately, the preferences may not be in a form that can be effectively exploited by delete relaxation based heuristic search. Consider
the preference formula γ = 2(φobs → φexpl ). Step 4 culminates in an automaton with accepting predicate acceptγ .
Unfortunately, acceptγ is generally true at the outset of plan
construction because φobs is false – the observations have
not yet occurred in the plan – making φobs → φexpl , and
thus γ, trivially true. This deactivates the heuristic search to
achieve acceptγ and thus the satisfaction of this preference
does not benefit from heuristic guidance. For a restricted but
compelling class of preferences, namely those of the form
2(φobs → i ei ) with ei a non-temporal formula, we can
pre-process our preference formula in advance of applying
Approach 1, by exploiting the fact that we know a priori what
observations have occured. Our pre-processing utilizes the
265
Total-Order
HPLAN -P
L AMA
following LTL identity:
2(φobs → ei ) ∧ ♦φobs ≡ ¬φobs U(ei ∧ ♦φobs ).
i
i
Given a preference in the form 2(φobs → i ei ) we
determine whether φobs is entailed by the observation ϕ (this
can be done efficiently given the form of our observations).
If this is the case, we use the identity above to transform our
preferences, followed by application of Approach 1. The
accepting predicate of the resulting automaton becomes true
if φexpl is satisfied prior to φobs . In the section to follow, we
see that exploiting this pre-processing can improve planner
performance significantly.
Partial-Order
HPLAN -P
L AMA
Appr 1 Appr 2 Appr 1 Appr 2 Appr 1 Appr 2 Appr 1 Appr 2
computer-1 1.05
computer-2 5.01
computer-3 23.44
computer-4 55.69
computer-5 128.50
computer-6 83.17
computer-7 505.73
computer-8 236.03
car-1
1.60
car-2
8.96
car-3
563.60
car-4
NF
car-5
NF
car-6
NF
car-7
NF
car-8
NF
power-1
0.02
power-2
0.18
power-3
0.47
power-4
1.62
power-5
26.98
power-6
51.65
power-7
177.58
power-8
565.77
truck-1
1.90
truck-2
5.25
truck-3
108.83
truck-4
323.18
truck-5
177.68
truck-6
NF
truck-7
NF
truck-8
NF
Experimental Evaluation
The objective of our experimental analysis was to gain some
insight into the behavior of our proposed preference formalism, specifically, we wanted to: 1) develop a set of somewhat diverse benchmarks and illustrate the use of planners
in the generation of explanations; 2) examine how planners
perform when the number of preferences is increased; and 3)
investigate the computational time gain resulting from Approach 2. We implemented all compilation techniques discussed in Section 5 to produce PDDL3 planning problems
with simple preferences that are equivalent to the original
explanation generation problems.
We used four domains in our experiments: a computer domain (see Grastien et al. 2007), a car domain (see McIlraith
and Scherl 2000), a power domain (see McIlraith 1998), and
the trucks domain from IPC 2006. We modified these domains to account for how observations and explanations occur within the domain. In addition, we created two instances
of the same problem, one with total-order observations and
another with partial-order observations. Since the observations we considered were either total- or partial-order, we
were able to compile them away using a technique that essentially makes an observation possible only after all preceding observations have been observed (Haslum and Grastien
2009; 2011). Finally, we increased problem difficulty by increasing the number of observations in each problem.
To further address our first objective, we compared the
performance of FF (Hoffmann and Nebel 2001), L AMA
(Richter, Helmert, and Westphal 2008), SGPlan6 (Hsu and
Wah 2008) and HPLAN -P (Baier, Bacchus, and McIlraith
2009) on our compiled problems but with no preferences.
The results show that in the total-order cases, all planners
except HPLAN -P solved all problems within seconds, while
HPLAN -P took much longer, and could not solve all problems (i.e., it exceeded the 600 second time limit). The same
results were obtained with the partial-order problems, except that L AMA took a bit longer but still was far faster than
HPLAN -P. This suggests that our domains are reasonably
challenging.
To address our second objective we turned to preferencebased planner HPLAN -P. We created different versions of
the same problem by increasing the number of preferences
they used. In particular, for each problem we tested with 10,
20, and 30 preferences. To measure the change in computation time between problems with different numbers of preferences, we calculated the percentage difference between
0.78
4.88
22.85
51.98
125.98
82.78
484.68
205.81
1.53
8.31
40.17
103.80
245.69
522.50
NF
NF
0.01
0.18
0.50
1.52
24.60
51.48
177.42
564.71
1.62
5.10
92.57
323.06
174.22
NF
NF
NF
5.29
0.19
0.75
6.94
2.05
2.64
4.23
3.75
0.66
10.72
13.98
24.00
35.93
117.45
62.00
108.07
0.02
0.13
0.13
0.63
5.97
11.26
15.09
30.67
0.13
0.85
0.38
2.03
3.31
2.69
10.23
11.60
0.25
0.41
0.75
4.58
3.20
4.63
5.85
6.13
0.08
0.20
0.59
1.41
1.56
2.44
3.47
4.46
0.02
0.06
0.13
0.58
0.97
6.84
9.42
16.38
0.29
0.74
1.07
2.48
4.93
1.88
11.92
8.76
2.26 0.58
1.49 1.42
15.92 15.57
15.97 13.93
57.28 56.19
43.92 43.86
188.45 181.44
159.92 152.49
0.60 0.53
3.04 2.59
593.10 15.06
NF 38.48
NF 103.18
NF 176.11
NF 170.54
NF 257.10
0.82 0.53
0.14 0.13
0.31 0.33
75.37 69.85
NF
NF
NF
NF
NF
NF
NF
NF
3.08 1.98
3.12 3.07
36.92 27.57
402.96 219.73
NF
NF
NF
NF
NF
NF
NF
NF
5.93
0.50
1.02
3.64
3.42
16.99
89.03
29.35
2.11
15.14
16.51
33.79
NF
NF
NF
NF
0.02
0.40
3.50
14.92
46.43
NF
NF
NF
0.24
0.32
0.59
2.15
2.71
8.53
8.42
8.19
0.57
0.42
1.94
4.33
6.12
16.27
68.47
28.91
0.07
0.25
0.62
0.95
1.23
1.56
2.02
2.94
0.02
0.06
0.11
18.37
0.64
NF
NF
NF
0.24
0.49
1.15
1.87
3.90
6.14
8.41
11.81
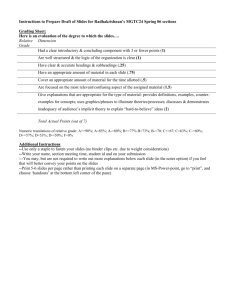
Figure 1: Runtime comparison between HPLAN -P and L AMA on
problems of known optimal explanation. NF means the optimal
explanation was not found within the time limit of 600 seconds.
the computation time for the problem with the larger and
with the smaller number of preferences, all relative to the
computation time of the larger numbered problem. The average percentage difference was 6.5% as we increased the
number of preferences from 10 to 20, and was 3.5% as we
went from 20 to 30 preferences. The results suggest that as
we increase the number of preferences, the time it takes to
find a solution does increase but this increase is not significant.
As noted previously the Approach 1 compilation technique (including Step 4) results in the complete removal
of temporal modalities and therefore enables the use of the
Keyder and Geffner’s compilation technique (2009). This
technique supports the computation of preference-based
plans (and now preferred explanations) using cost-based
planners. However, the output generated by our compilation
requires a planner compatible with ADL or derived predicates. Among the rather few that support any of these,
we chose to experiment with L AMA since it is currently
the best-known cost-based satisficing planner. Figure 1
shows the time it takes to find the optimal explanation using HPLAN -P and L AMA as well as the time comparison between our “Approach 1” and “Approach 2” encodings (Section 5). To measure the gain in computation time from the
“Approach 2” technique, we computed the percentage difference between the two, relative to “Approach 1”. (We assigned a time of 600 to those marked NF.) The results show
that on average we gained 22.9% improvement for HPLAN P and 29.8 % improvement for L AMA in the time it takes
to find the optimal solution. In addition, we calculated the
266
time ratio (“Approach 1”/ “Approach 2”). The results show
that on average HPLAN -P found plans 2.79 times faster and
L AMA found plans 31.62 times faster when using “Approach
2”. However, note that “Approach 2” does not always improve the performance. There are a few cases where the
planners take longer when using “Approach 2”. While the
definite cause of this decrease in performance is currently
unknown, we believe this decrease may depend on the structure of the problem and/or on the difference in the size of the
translated domains. On average the translated problems used
in “Approach 2” are 1.4 times larger, hence this increase in
the size of the problem may be one reason behind the decrease in performance. Nevertheless, this result shows that
“Approach 2” can significantly improve the time required to
find the optimal explanation, sometimes by orders of magnitude, in so doing it allows us to solve more problem instances than with “Approach 1” alone (see car-4 and car-5).
In Proc. of the Logics in Artificial Intelligence, European Workshop
(JELIA), 247–260.
Bylander, T. 1994. The computational complexity of propositional
STRIPS planning. Artificial Intelligence 69(1-2):165–204.
de Giacomo, G., and Vardi, M. Y. 1999. Automata-theoretic approach to planning for temporally extended goals. In Biundo, S.,
and Fox, M., eds., ECP, volume 1809 of LNCS, 226–238. Durham,
UK: Springer.
Gabbay, D. M. 1987. The declarative past and imperative future:
Executable temporal logic for interactive systems. In Temporal
Logic in Specification, 409–448.
Gerevini, A.; Haslum, P.; Long, D.; Saetti, A.; and Dimopoulos, Y.
2009. Deterministic planning in the 5th int’l planning competition:
PDDL3 and experimental evaluation of the planners. Artificial Intelligence 173(5-6):619–668.
Göbelbecker, M.; Keller, T.; Eyerich, P.; Brenner, M.; and Nebel,
B. 2010. Coming up with good excuses: What to do when no plan
can be found. In Proc. of the 20th Int’l Conference on Automated
Planning and Scheduling (ICAPS), 81–88.
Grastien, A.; Anbulagan; Rintanen, J.; and Kelareva, E. 2007.
Diagnosis of discrete-event systems using satisfiability algorithms.
In Proc. of the 22nd National Conference on Artificial Intelligence
(AAAI), 305–310.
Haslum, P., and Grastien, A. 2009. Personal communication.
Haslum, P., and Grastien, A. 2011. Diagnosis as planning: Two
case studies. In Proc. of the Int’l Scheduling and Planning Applications workshop (SPARK).
Hoffmann, J., and Nebel, B. 2001. The FF planning system: Fast
plan generation through heuristic search. Journal of Artificial Intelligence Research 14:253–302.
Hsu, C.-W., and Wah, B. 2008. The SGPlan planning system in
IPC-6. In 6th Int’l Planning Competition Booklet (IPC-2008).
Iwan, G. 2001. History-based diagnosis templates in the framework of the situation calculus. In Proc. of the Joint German/Austrian Conference on Artificial Intelligence (KR/ÖGAI).
244–259.
Keyder, E., and Geffner, H. 2009. Soft Goals Can Be Compiled
Away. Journal of Artificial Intelligence Research 36:547–556.
Markey, N. 2003. Temporal logic with past is exponentially more
succinct, concurrency column. Bulletin of the EATCS 79:122–128.
McGuinness, D. L.; Glass, A.; Wolverton, M.; and da Silva, P. P.
2007. Explaining task processing in cognitive assistants that learn.
In Proc. of the 20th Int’l Florida Artificial Intelligence Research
Society Conference (FLAIRS), 284–289.
McIlraith, S., and Scherl, R. B. 2000. What sensing tells us: Towards a formal theory of testing for dynamical systems. In Proc.
of the 17th National Conference on Artificial Intelligence (AAAI),
483–490.
McIlraith, S. 1998. Explanatory diagnosis: Conjecturing actions
to explain observations. In Proc. of the 6th Int’l Conference of
Knowledge Representation and Reasoning (KR), 167–179.
Ramı́rez, M., and Geffner, H. 2009. Plan recognition as planning.
In Proc. of the 21st Int’l Joint Conference on Artificial Intelligence
(IJCAI), 1778–1783.
Richter, S.; Helmert, M.; and Westphal, M. 2008. Landmarks
revisited. In Proc. of the 23rd National Conference on Artificial
Intelligence (AAAI), 975–982.
Sohrabi, S.; Baier, J.; and McIlraith, S. 2010. Diagnosis as planning revisited. In Proc. of the 12th Int’l Conference on the Principles of Knowledge Representation and Reasoning (KR), 26–36.
Summary
In this paper, we examined the task of generating preferred
explanations. To this end, we presented a logical characterization of the notion of a (preferred) explanation and established its correspondence to planning, including the complexity of explanation generation. We proposed a finite variant of LTL, f-P LTL, that includes past modalities and action occurrences and utilized it to express observations and
preferences over explanation. To generate explanations using state-of-the-art planners, we proposed and implemented
a compilation technique that preserves f-P LTL semantics
while conforming to PDDL3 syntax. This enables computation of preferred explanations with PDDL3-compliant
preference-based planners as well as with cost-based planners. Exploiting the property that observations are known
a priori we transformed explanation preferences into a form
that was amenable to heuristic search. In so doing, we were
able to reduce the time required for explanation generation
by orders of magnitude, sometimes. A number of practical problems can be characterized as explanation generation
problem. The work presented in this paper opens the door to
a suite of promising techniques for explanation generation.
Acknowledgements: We thank Alban Grastien and Patrik Haslum for providing us with an encoding of the computer problem, which we modified and used in this paper
for benchmarking. We also gratefully acknowledge funding
from the Natural Sciences and Engineering Research Council of Canada (NSERC). Jorge Baier was funded by the VRI38-2010 grant from Universidad Católica de Chile.
References
Baier, J., and McIlraith, S. 2006. Planning with first-order temporally extended goals using heuristic search. In Proc. of the 21st
National Conference on Artificial Intelligence (AAAI), 788–795.
Baier, J., and McIlraith, S. 2008. Planning with preferences. AI
Magazine 29(4):25–36.
Baier, J.; Bacchus, F.; and McIlraith, S. 2009. A heuristic search
approach to planning with temporally extended preferences. Artificial Intelligence 173(5-6):593–618.
Brewka, G. 1994. Adding priorities and specificity to default logic.
267