From: AAAI Technical Report FS-94-01. Compilation copyright © 1994, AAAI (www.aaai.org). All rights reserved.
Case-Based Plan Recognition in Dynamic Domains
Dolores
Cafiamero
Yves
Kodratoff
CNRS-LRI
Bat. 490, Universit6 Paris-Sud
91405 Orsay Cedex, France
{ lola, yk}@lri.lri.fr
Jean-Fram;ois
Delannoy
Michel
BarBs
Dept. of ComputerScience
DRET-SDR
University of Ottawa
4,medelaPorte
d’Issy,
Ontario K1N6N5, Canada
00460ParisArmies,
dclannoy
@csi.uottawa.ca
France
command, not to issue commands. In the context of
Abstract
Inthe context
ofa Command,
Control,
Communication
and
electronic war, commanders
find it more and moredifftcult
Intelligence
(C31)
system
wehavebuilt
a CBRmodule
for
to simply process the huge amountsof data they are made
planrecognition.
Itisbased
onknowledge
representation aware of. The main role of C3I is thus to perform data
structures
called
XPlans,
inspired
inpartby Schank’s
fusion as intelligently as possible. Nevertheless, the same
Explanation
Patterns.
Theuncertainty
inherent
toan
data mayhave very different interpretations depending on
uncontrolled
flow
ofinput
andthepresence
oflacunary
data
the context. Evenfor "simple" data fusion, determiningthe
make
difficult
theretrieval
ofcases.
This
ledustodevelop
context is equivalent to guessing what the enemy’s
analgorithm
forpartial
andprogressive
matching
ofthe
intentions and plans are. This is why a high-level
target
caseontosomeofthesource
cases.
Thismatching
interpretation layer is necessaryevenfor a C3I that does not
amounts
inpractice
to a credit
assignment
mechanism,
included
inthealgorithm
associated
witheachXPlan.
This
pretend more than helping a commander avoid being
method
hasbeendesigned
tomeettherequirements
of a
bogged under huge amounts of information.
l project
DRET
tobuild
a decision
support
module
fora C3I
Our system is "real-world" as it has to deal with real
system--the
MATIS
project.
Itstasks
istointerpret
and
data--an evolving situation described at a level which is
complete
theresults
ofanintelligent
"pattern-recognitionlower than that of self-contained actions, and which
and-data-fusion"
module
inorder
tomaketheintentions
consists of punctual events. Our data have been partially
underlying
therecognized
situation
explicit
tothedecisioncollected by Intelligence, and we must adapt to their
maker.
Thisadvice
isgiven
asa causal
explanation
ofan
knowledgerepresentation for our input/output (our other
agent’s
behavior
from
low-level
information.
information sources are the 3 lower levels of MATIS,see
next section). Thesedata present six undesirable features:
Introduction
1. Measures are taken in a fixed way. This means that
incoming data may not contain the information
In thecontext
of a Command,
Control
Communication
and
characterizing a situation. For example, in order to
Intelligence
(C3I)systemwe havebuilta Case-Based recognize that a car stopped at a traffic light, one usually
Reasoning
(CBR)module
forplanrecognition.
It is based
assumesthat_ the car is recordedwhile stoppedat the light.
on knowledge
representation
structures
calledXPlans,
This maynot be true for our data, which mayonly report of
inspired
in partby Schank’s
Explanation
Patterns
(Schank, a car slowing downbefore a light, and the measurementof
1986;Schankand Kass,1990),but whichhavebeen
the car at nullspeed
maybemissing.
designed
torecognize
an agent’s
plansandmotivations
in
2.
Since
measurements
performed
at somepointmaytake
dynamicdomainsandfromlow-level
data.XPlansare
some
time
to
reach
the
interpretation
center,
thetemporai
basically
prototypical
casesofplanscontaining
both,
the
ordering
of
input
data
may
not
be
the
same
as
the
ordering
standard
behavior
ofan agentinsomegivencircumstances
that
occurred
in
the
field.
Consequently,
a
hypothesis
must
(planningknowledge),
and knowledgeabouthow
neverbe discarded
on thegrounds
of missing
dataat a
interpretthe behaviorof an agent in that same
given
time,
sinceconfwming
datamayarrive
later.
circumstances
(recognition
knowledge).
Plausible
plans
3.There
aredifferent
levels
ofgranularity
inthedata.
For
reflecting
thestandard
behavior
in thecircumstances
in
whichtheobserved
agentcurrently
findshim/herself
are
example,
someinformation
may be veryrelevant
for a
combat
section
andnotatallfora company,
etc.
usedto interpret
theactual
agent’s
behavior.
Theyare
progressively
confu’mcd
or rejected
depending
on the
4. Forevery
level
of granularity,
theunitsareperforming
compliance
oftheobserved
withthestandard
behavior.
tasksat whichtheynormally
collaborate.
Eachagentis
Ourplanrecognition
system
isa module
tobeintegrated intelligent
initsway,butitisnotfreetothreaten
inany
ina C31system.
Current
C3Isystems
areintended
to help
waythegeneral
plan(ona battlefield,
"backtracking"
usually
implies
heavylosses).
Freedom
is strongly
limited,
i DRET
is a service of the French Minist~re de la D#fense
butnever
totally
absent.
Nationale.
5.Dataarelacunary
andcanbenoisy.
16
6. Datacontain informationthat represents actions which
take place at specific locations and at specific points in
time.
Aseventhrequirementof a different nature mustalso be
met. Since a C3I systemis intended to help a commander
whohas heavyresponsibifities, andwhois held personally
responsibleof his/her decisions,it is not possibleto make
decisions on data fusion in a waywhichis not directly
understandable to the commander.Answershave to be
presented to the commander
in his/her ownlanguage.This
explanatoryfacultyis veryhigh-level,but it is also another
requirement of real-life: a C3I system which does not
explainits actionswill at best be reluctantlyacceptedunder
heavyconstraints. This seventhrequirementis especially
relevant for decision supportsystemswhichare to be used
in critical domains.
Strong specifications as the seven above cannot be
exactlymetin the presentstate of the art, that saystittle
about recognitionfromevents, or fromnoisy andlacunary
input, althoughthese questionsare classic in statistical
signal recognition and in the machinelearning community
(Kodratoff et al., 1990). Thedifferent approachesonly
providepartial answersto these problems.Plan recognition
is generallyconsideredin an ideal context, wherethe input
is supposedto be 100%correct (violating requirement5)
and consists of actions, that is, chunks of activity
representingwell-definedtransitions in the si01~tion(thus
violating requirement1). Suchideally clean contexts can
be described in strong-theory domains, and makeit
possible the application of formal techniques such as
abduction (Charniak and McDermott,1985; Kautz, 1991;
Allen et at, 1991;van BeckandCohen,1991)or syntactic
parsing(Vilain, 1990).Lacunarityis addressedby (Pelavin,
1991) whorefines on Kautz by incorporating partial
descriptions of the world(correspondingto our lacunary
input) andexternal events(as in our notionof an evolving
situation). However,he does not consider false data.
Uncertaintyhas been well addressedby probabilistic and
spreading action approaches, whichhave in common
the
use of a confidencevalueattachedto the plans retained as
hypotheses. (Charniak and Goldman,1991) propose
probabilistic model of plan recognition based on a
Bayesiannetwork,wherethe input is low-level, and the
output as well, whereashigh-level output is one of our
requirements.Modelsof spreadingactivation (Quast, 1993;
Langeand Wharton,1993) maybe moreflexible as they
allowa moreversatile specificationof the behaviorof the
library nodesin the recognitionprocess.Withinthe framebasedapproachto plan recognition, (Schankand Riesbeck,
1991) have a powerfuluse of conunonsense
knowledgeand
of explanation questions, but cannot interpret evolving
situations. In the narrative understandingsystemGENESIS
(Mooney,1990a&b)combinescase-based recognition and
explanation-based learning for automatic schema
acquisition. However,this approach do not address
problemsof lacunarity, uncertainty, and low-levelinput.
(Laskowskiand Hofmann,1987) have efficient belief and
17
time-handling mechanisms,but their approach is again
basedon actions, not on events.
In order to cope at least partially with all these
requirements, we have developed a form of knowledge
representation called here XPlans. These knowledge
representationstructuresare essentially cases or prototypes
of plans whichare progressivelyrecognizedas the indices
of the field are gathered. Theygive an interpretation of
low-levelreal data in terms of a plan applied by an agent
and of the causes and motivations that explain this
behavior.
The MATIS Project
Ourplan recognition systemis to be integrated in MATIS
(Mod~le d’Aide d la ddcision par le Traitement de
l’Information Symbolique--"modelof decision-aid by
symbolic information processing"). The MATIS
modelis
designedto providesupport for military decision (Bar~s,
1989)in critical or difficult situations,withinthe contextof
C3I. However,it can obviouslybe of use in all civilian
contexts in whichdecision makingbecomesdifficult. It
coversa comprehensive
range of tasks, fromthe processing
of basic raw data (generally numeric)to the handling
"knowledge
objects", i.e., elementswhichcarry somedirect
relevancefor the decision-maker.
MATISArchitecture
Somehypotheses are used to somehowanticipate the
situation, or to enumeratepossiblebehaviorsof the enemy,
by taking into account some knowledgestored in the
memory
of the system. This knowledgeconsists of facts
already knownabout the situation. Facts are confirmedby
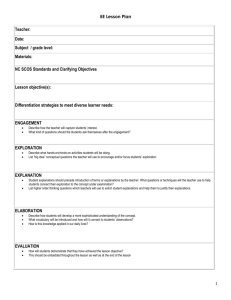
the doctrine (see Figure 1). There is no need for these
hypothesesto be exact at fast, since they are mainlyused
to initialize the model,andthey will be changedaccording
to the situation as perceivedby the upper layers. These
hypotheses can be seen as a layer previous to MATIS
interpretationlayers (Figure1):
¯ Thefast layer consists of a perceptualsystemmadeof a
numberof sensor families whichtrack various physical
parameters.It performsdata fusion on basic data observed
by the sensors---observations.Thenumericoutput fromthe
sensor families is convertedto symbolicformatby a fast
interpretationtreatment,called perceptionin Figure1.
¯ Thesecond layer identifies elementsrelevant to the
action, e.g., a car, the orderof battle, etc. It attributes a
nameto eachrelevant elementor entity.
¯ Thethird layer groupsentities into significantcollections
of objects---association.
Thesethree layers progressivelyenrich the information
flowing through the reasoning system of MATIS,
mainly
by increasing the semantic content of each knowledge
object.
Our plan recognition system can be seen as a fourth
layer. It handlesthe semanticallyrichest informationof the
third layer. Thefourth layer doesnot bear just on objects,
but rather on their behavior--using XPlans, it interprets
this behavior in terms of predefinedplans and goals.
incremental evidence assignment. This robust approach is
adopted in our system. In addition to the requirements
imposed by the nature of data, several characteristics
follow from this robust approach:
¯ The input consists of an imposedsequence of events (not
of actions): (a) they are snapshots of the observedactivity
(they have no duration), situated at whatever point of the
behavior of a car; on the contrary, an action spans some
amount of time; Co) they ate measured at any time, not
necessarily at the time of a qualitative transition. In fact,
qualitative transitions have to be reconstructed from
events---for example, the system must find that the car is
turning left, based on the position and speed of the car at
various instants.
¯ The system must be able to process massive input, and to
smoothout the incidence of false data.
¯ The output must include a list of plausible plans, the
confidence rate of which must be incrementally confn’med.
¯ The system must be able to interpret low-level data in
terms of high-level concepts so that the advice provided
can be easily understood by the user. This advice must also
be satisfactorily justified.
0
Field dire
(eo.radar
0
[~¢ture s. I nft’lred pl ¢1~Jres, et¢~
m
Percaptlon
Red wodd
-
Symbolic world
Figure 1: MATISarchitecture and knowledgeprocessing.
Our plan recognition system can be seen as a fourth layer.
Feedbackoccurs only through factual knowledge.
Finally, a presentation layer displays the semantically
enriched data in different strata depending on the user’s
needs. These strata correspond to the following levels in
the objects perceived: Shapes, like elements of a vehicle,
objects, like vehicles, collections of objects, e.g., armored
companies, relations amongobjects and their collections,
elementary moves, e.g., tank # 32 moves forward, or
company# 3 moves Eastwards.
In MATIS
there is no feedback from the semantic levels
onto the numericdata, contrary to the present tendency to
require high-level understanding to help correct potential
errors in the numericdata wheneverthey induce high-level
contradictions. In fact, there is a quite strict sequential
process of relevance enrichment, i.e., while compressing
information, the understandability of knowledgeobjects is
progressively improved. Similarly, there is no feedback
from a higher semantic level to a lower one, and the
informationcontent must strictly increase fromthe lower to
the higher levels. The only exception to this rule is the
possibility to add new facts into the factual knowledge
base. Addedfacts can come either from the user, or from
the plan recognition module. A consequenceof this "almost
no-feedback" policy was a stringent requirement on the
robustness of the interpretation
modules, that must
inherently be able to handle noisy and irregular data.
Constraints on Plan Recognition
In real conditions of operation C3I systems are unavoidably
faced with massive amountsof low-level data, which are
not altogether reliable, and maylack at crucial moments.
Such a context imposes weak-theory modeling and
18
The Problem Situation
The domainchosen for the initial modelinghad to present
the features listed above. In a car driving domain, our
system must face the following type of problems. A car-the agent--is moving.Its driver is supposedto be a rational
agent with goals or motivations (e.g., saving time, saving
gas, etc.) that will lead higher to drive in a certain way
rather than another in order to satisfy a particular goal in a
specific situation. The observer--the recognition system
with cooperation from the decision maker--cannot see the
car directly. In principle, it knowsnothing about the agent.
The recognition situation is a case of keyhole recognition
(Cohen et al., 1981), i.e., the agent is unawareof being
observed, and the observer cannot attribute to the actor any
intention to cooperate in the recognition process. The only
information the observer has available are sets of low-level
data such as speeds, positions, and distances, whicharrive
periodically. As additional assumption, the observer
considers this agent "at the knowledgelevel". That is, it
considers this agent, which is embedded in a task
environment, as composedof bodies of knowledge(about
the world), someof whichconstitute its goals, and someof
which constitute the knowledge needed to reach these
goals---the agent processes its knowledgeto determine the
actions to take. Its behavioral law is the principle of
rationalitym"If an agent has knowledgethat one of its
actions will lead to one of its goals, then the agent will
select that action" (Newell, 1982)--but in its more
pragmatic form of the twO-step rationality theory (van de
Velde, 1993). In this form, the practical application of the
principle of rationality is constrained by the boundariesof a
model of the problem-situation (Catiamero, 1994), which
takes into account the specific circumstances
in which the
task is to be solved--’task features’. This way, the
assumptionis madethat the behaviorof the agent is both
rational and practical. Basedon this assumption,and from
the availablelow-leveldata, the observerfiaust interpret the
car driver’s behavior. In particular, it mustexplain: (a)
whatthe driver seemsto be doing,e.g., overtakea car; Co)
hows/he doesit, e.g., faster than it wouldbe safe; and(c)
whys/he acts this wayrather than another--whathis/her
goalsor motivationsare (savingtime, etc.).
Plan Recognition
Based on XPlans
plan recognitioncan be definedas the interpretation of a
changing situation. It can be seen as a process of
understandinginverseto that of planning0Vilensky,1981,
1983):while planninginvolvesthe constructionof a plan
whoseexecutionwill bring abouta desiredstate (goal),
plan recognitionthe observerhas to followthe goals and
plans of actors in a situation in order to makeinferences.
This process implies making sense out of a set of
observations by relating them to previous knowledgeso
that the observer can integrate those observationsin an
overall picture of the situation. In other words, plan
recognitionhere is consideredas understandinga problem
situation by relating someobservations to previous
knowledge
about an agent’s goals and plans. Accordingto
Schank (Schank, 1986) this form of understanding
closelyrelated to twoother cognitiveprocesses:
¯ Explanation.Theactions of others can be explainedby
understandinghowthey fit into a broader plan. "Saying
that an action is a step on a coherentplan towardsa goal,
explainsthat action."(p. 70).
¯ Learning.Learningis usually definedas adaptationto a
newsituation, but for Schankit also means"finding or
creating a newstructure that will render a phenomenon
understandable."
(p. 78).
In this line, weuse a set of patterns to understandand
explain the behavior of an agent. Our approach is to
interpret a coherent behavior in terms of schemataor
frames, with a double presupposition concerning the
observedagent:
¯ Intentionality. The agent has somepurpose. This
excludesinexplicablebehavior.
¯ Rationality. Theagenthas the faculty of pursuinga goal
by setting him/herself some subgoals. This excludes
randombehavior.
These assumptions allow us to explain and make
predictions about the future behaviorof the agent on the
basis of previousknowledge.Previousknowledgeconsists
of a library of prototypicalplans indicatingwhata standard
(ideally rational) agentshoulddo in different situations
obtaincertain goals.
Structure and Organization of XPlans
XPlans are inspired in part by Schank’s Explanation
Patterns. However, they present some substantial
differences, since the contextweare workingin is entirely
19
different fromSchank’s.Wehaveto consider an evolving
situation in whichmassive,uncertain and lacunar), input
correspondingto events arrives in an uncontrollableflow.
Therefore, we need a moreelaborated domainknowledge
in orderto give a logic andunderstandable
interpretationto
row data that do not have a meaningby themselves.
Additionally,weconsidertwo points of view: (a) that of
standard agent, whois supposedto behavein a rational
way,i.e., planningsequencesof actions in order to attain
some goaismplanning knowledge; and (b) that of
observerwhotries to understandwhata real agentis doing
by comparing the information s/he gets to his/her
knowledgeabout what a standard agent should do in that
circumstances---recognitionknowledge.Weneedthus two
types of semanticallydifferent rules: planningrules and
recognition rules, whichare based on the planningones.
Bothtypes of rules are integrated in complexstructures~
schemata---including,amongother information, the rule
application context. Recognition knowledgeis highly
contextual,since oneaction can respondto different causes
in various contexts, and hence must be given different
interpretations. For example,excessive speed wouldbe
associatedto different interpretations in the contextof a
plan for overtakinga car or in the context of a plan for
approachinga red light. Among
other information, XPlans
include the followingelements:
¯ Parameters:List and description of the variables used,
includingconfidencevalue.
¯ Preconditions:The basic facts that musthold for the
plan to be considered.Whenthey hold, the plan is said to
be active andits recognitionalgorithmis applied.
¯ Planningalgorithm(PA): Descriptionof the behaviorof
a standard(ideal) driver in the situation describedby the
XPlan.It consists of the sequenceof phasesthat the agent
should follow to accomplishthe plan. Every phase has
associated twodifferent types of rules: activation rules,
whichcall anotherplan (and optionallydeactivatethe plan)
whenpreconditions do not hold anymore, and behavior
rules, whichresult in the modificationby the agentof the
value of one or moreparameters.
¯ Recognitionrules (RR): Theycontrol the modificationof
the confidence value of the plan, and assign an
interpretation to the observed behavior, according to
behaviorrules in the PA.
¯ Postconditions: Theydescribe sufficient conditions-elementsof the worlddescription after completionof the
plan--for deactivatingthe plan, both in the case the plan
2.
has succeeded
andin the case it has failed
2 Failure conditions are considered because something
external to the agent mayhappenthat prevents it from
accomplishingthe plan (e.g., car2 suddenlystopped and
cart collides into care). This is becausein this domainthe
situation changesnot only as a consequence
of the agent’s
behavior,but also independently
of it.
¯ Motivations: Theyrepresent the goal pursued by the
agentwhenadoptinga specific strategy rather than another
to accomplish
a ta~k.
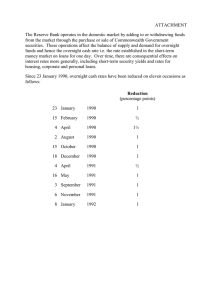
XPlansare organizedin the formof a hierarchy(Figure
2) whichconstitutesa library of prototypicalcases.
"apgoach
"a~coach
"ad ~--ed
green
oa
~t"
~ ~
~¢h red Ight"
-’~"
...............
, u~u.
"~.do~,~.~o~"
"p~.s rea llgh~
"plum ~’een Bgh~
.~~~
bellmdmoth~rcar"
"slow anoth~
downbdoce
bdm~d
~, ~h~
Figure
2: A subpart
~.~~lJ~et
down bd~
¢~,red~ l~l~ beh~
of the hierarchy
of XPlans relative
to
driving.
There are two maintypes of links in this taxonomy.The
first type of link (dark arrows)expressesthe Spec~ii7~tion
of the context (preconditions) in whichthe XPlantakes
place. The XPlanthat this type of link gives rise to
correspondsto a task that the agent must perform. The
other type of link (gray arrows)expressesthat the child
XPlan is a consequenceof a choice of the driver---a
prototypicalstrategy chosento performa task accordingto
a certain motivation.
deactivated in four ways: (a) If their postconditionsare
satisfied; (b) Whencalling another, a plan maydeactivate
itself if it becomes
useless; (c) Below
a certain threshold
the confidence value (0.1), a plan is automatically
deactivated. A low confidence value can be reached
throughapplication of recognition rules with a negative
effect on the confidence--reflectingdiscrepancybetween
the driver’s courseof action andthe standardbehavior--or
whenfor several events no recognition rule will apply
(attrition mechanism); (d) Whena plan has been
successfullycompleted,its concurrentsare deactivated.
The general loop for the processing of an event is as
follows: Initially, only the root node is active. The
postconditionsof active plans are examined
first; the plans
whosepostconditionshold are deactivated,as well as their
concurrents.Thena depth-first search on the preconditions
of childrenplans is started. If the preconditionsof a plan
hold, it is activatedandthe parent planis deactivated.At
this point, a recognition algorithmis applied to every
single active plan. If the recognitionrules of a plan cannot
be applied,its confidencevalueis slightly decreased.If the
confidence value of a plan is smaller than a certain
threshold (fixed to 0.1), that plan is automatically
deactivated(its confidencevalueis forceddownto 0).
The recognition algorithmapplied on each plan is the
following.For everyneweventin the input, the activation
rules are checkedand triggered if applicable; other plans
are activatedas specifiedin that rules, andthe plan itself
can be deactivated. If the plan is still active, for each
applicable behaviorrule, the ideal value of the parameter
used as a reference is calculated and comparedto the
measuredactual value. Then,basedon their difference, the
confidencevalueof the plan is adjusted--it is increasedif
the differenceis smallor nufl, decreasedelse.
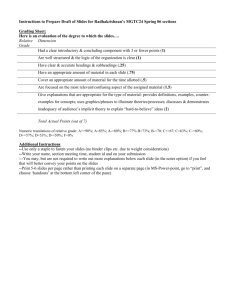
Figure3 showsthe evolutionof the confidencevaluesof
three plans: at the beginning,the three of themcould be
plausiblehypothesesto interpret the driver’s behavior,but
only one of themwill be successfullycompletedand hence
confmned.
The Recognition Process
The plan recognition process consists basically of the
retrieval of cases (prototypical plans) from the XPlan
hierarchyin order to interpret andexplainthe behaviorof
the agent fromthe low-leveldata feeding the system.The
uncertainty inherent to an uncontrolledflow of input and
the presenceof lacunarydammakedifficult the retrieval of
cases. This led us to developan algorithmfor partial and
confidence value
progressivematchingof the target case onto someof the
successfully
sourcecases stored in the library. This matchingamounts
initial values of the
1
~pleted
in practice to a credit assignmentmechanism,
includedin a
recognitionalgorithmassociatedwith eachXPlan.
In orderto recognizethe plan that the agentis applying,
wetry to followhis/her steps by producinginterpretative
concurrent to
hypotheses, as specific as data allow, and prudently
~.
0..~
~ successful
plan
confu’mingor disqualifying themas newdata arrive. The
~ow
dropped
mechanism we propose is somehowcomparable to
spreadingactivation: plans activate oneanother downthe
under a minimumthreshold:
"~.~_
hierarchical structure of the plan library, or across the
abandoned
hierarchy. Severalconcurrenthypothesescan be plausible
interpretations of the agent’s behavior. This meansthat
succession of "events" (input information) time
multipleplans can be simultaneouslyactive. Plans can be
activated in two ways:(a) Forwardactivation of the most Figure 3: Evolutionof the confidencevalues of several
specific set of preconditions.If a plan is active, it checks plans.
the preconditionsof its subtree. If the preconditionsof a
planin the subtreehold, it is activated;(b) Activationof
plan by another through activation rules. They can be
2O
Whenall the plans in a certain branch have been
deactivated, the root node is made active again. This
corresponds to the case where a sequence has come to an
end, e.g., a car has driven past the traffic lights, and a new
situation has to be considered.
knowledgethat is not necessary for the recognition process
but useful for explanation is then responsible for providing
them. In this way, the performance of the recognition
systemis not affected.
Conclusion
Providing
Advice for Decision
Support
Explanations provided to the user play a essential role in
our system(Caflameroet al., 1992), since it is intended to
help a decision maker in critical domains. Our user has
heavy responsibilities
and s/he is held personally
responsible of his/her decisions; therefore, explanations
must be provided to him/her in his/her own language.
Indeed, we can define the overall objectives of the system
as: (1) relating the observedbehavior described in terms
low-level data to high-level structures that describe the
tactics or strategy applied by a rational agent in a given
situation; (2) interpreting this behavior in terms of the
agent’s motivations; and (3) providing satisfactory
explanations to user’s questions.
Advice is given as a causal interpretation--explanationmfrom the observer’s point of view, of lowlevel input data in terms of the agent’s plausible plan,
strategy, and motivation in a specific situation. A causal
account of the agent’s behavior seemsto be the right level
of interpretation in our case (Delannoyet al., 1992), given
that we must deal with intentional systems (Dennett, 1978;
Seek 1990)--agents that have desires and motivations, and
act accordingly. In addition, we consider these agents "at
the knowledge level". This interpretation--and
more
generally, the explanations provided by the system--is the
result of a trade-off amongthree factors: (1) the constraints
imposedby the robust approach to plan recognition, (2) the
purpose of the recognition task--decision support in
critical domains---and(3) the user’s needs for information.
Three main types of needs--and hence of explanations--are distinguished:
1. A reliable source of information. The interpretation
provided is aimedat understanding a situation in the world
by relating it to somepredefined high-level concept. This
explanation is dynamically constructed during the problem
solving process.
2. A means to test the user’s own hypotheses. They are
considered and, if plausible, addedto the list of possible
explanations.
3. Justification of different elementsof the interpretation, to
ensure that the system’s reasoning and/or conclusion can be
trusted.
Onlyexplanations of type 1 and 2 take part in the plan
recognition problem-solving process. Explanations of type
3 are considered only upon user’s request. They ate
constructed after plan recognition problem solving has
taken place, and its generation constitutes a complex
problem-solving process itself. They require additional
knowledgethat is not present in the recognition system, for
the sake of efficiency. A separate modulecontaining the
21
This paper describes a wayto performplan recognition in a
dynamic domain from low-level data. Plausible plans
reflecting the standard behavior of a rational agent in a
given situation arc used to interpret the actual agent’s
behavior. Monitoring the difference between both
behaviors allows to progressively confnan or reject the
different plausible hypothe~s.
Weaddress the problematic of plan recognition by
tackling several real-world characteristics that_ are not well
accommodatedby current techniques, such as low-level,
noisy, and lacunary data, a dynamic environment where
changes occur not only as a consequence of the agent’s
behavior. Frominput consisting of parameter values, which
give a partial description of the current situation, the
system must produce high-level output.
The recognition system we propose is based on a library
of prototypical cases or plans structured as frames. It uses a
mechanism comparable to spreading activation through
which plans activate one another downthe hierarchical
structure of the plan library, or across the hierarchy. In
other words, we try to walk on the steps of the agent by
producing interpretative hypotheses, as specific as data
allow, and prudently confirming or disqualifying them.
A CLOSprototype has been developed. Its graphical
interface allows the users to select input, analysis mode
(automatic or stepwise), display a bar chart of current
confidencevalues of active plans and a historic curve of the
confidence values, and to select several types of
explanations.
In addition to improvingexplanations, several interesting
problemscan be the object of future work. Among
others, a
better treatment of temporalrelations, and a deeper study of
the correspondence between the planning algorithm
(domain and strategic knowledge) and the recognition
rules. In this sense, a knowledge-level modelof the plan
recognition task has been proposed (Caflamero, 1994),
which aims at achieving a better understanding of the
rationale behind this problem-solvingbehavior, and offers
a guide for the acquisition of plan recognition knowledge.
Acknowledgments.This research is partially funded by
DRETunder contract 91-358.
References
Allen, J.F., Kautz, H.A., Pelavin, R.N., and Tenenberg,
LD. 1991. Reasoning about Plans, Morgan Kaufmann.
Bar~s, M. 1989. Aide h la d6cision darts les syst~mes
informatis6s de commandement:r61e de l’information
symbolique. DRETReport,July 1989, Pads.
Caflamero, D. 1994. Modeling Plan Recognition for
Decision Support. In Proceedings of the 8th European
Workshop on Knowledge Acquisition
(EKAW’94),
Hoegaarden, Belgium, September 26-29. SpringerVerlag, LNAIseries. Forthcoming.
Caflamero, D., Delannoy, L-F., and Kodratoff, Y. 1992.
Building Explanations in a Plan Recognition System for
Decision Support. Proceedings of the ECAIWorkshop
on Improving the Use of Knowledge-Based Systems
with Explanations, Vienna, Austria, August 1992;
Technical Report LAFORIA
92/21, Universit~ Paris VIL
France, pp. 35-45.
Charniak, E. and Goldman, R.P. 1991. A Probabilistic
Modelof Plan Recognition. Proc. Ninth AAAI, pp. 160165.
Charniak, E. and McDermott, D. 1985. Introduction to
Artificial Intelligence, Addison-Wesley.
Cohen, P.R., Perrault, C.R., and Allen, J.F. 1981. Beyond
question answering. In W. Lenhert and M. Ringle (eds.),
Strategies for Natural Language Understanding,
Lawrence Erlbaum, pp. 245--274.
Delannoy, J.-F., Cagamero, D., and Kodratoff, Y. 1992.
Causal Interpretation from Events in a Robust Plan
Recognition System for Decision Support. Proc. Fifth
International Symposium on Knowledge Engineering,
pp. 179-189,Sevilla, Spain, October5-9.
Dennett, D.C. 1978. Brainstorms: Philosophical Essays on
Mind and Psychology, Bradford Books.
Kautz, H.A. 1991. A Formal Theory of Plan Recognition
and its Implementation. In Reasoningabout Plans, eds.
J.F. Allen, H.A. Kautz, and J.D. Tenenberg, pp. 69-125,
Morgan Kaufmann.
Kodratoff, Y., Rouveirol, C., Tecuci, G., and Dural, B.
1990. Symbolicapproachesto uncertainty. In Intelligent
Systems: State of the Art and Future Directions, eds.
Z.W. Ras and M. Zermanova, pp. 226-255, Ellis
HorwoodLtd.
Lange, T.E. and Wharton, C.M. 1993. DynamicMemories:
Analysis of an Integrated Comprehensionand Episodic
MemoryRetrieval Model. Proc. 13th lntenational Joint
Conferenceon Artificial Intelligence (IJCAI), pp. 208213, Chambery, France, August 28-September 3,
Morgan Kaufmann.
Laskowski, S.J. and Hofman, E.J. 1987. Script-based
reasoning for Situation Monitoring. Proc. AAA187, pp.
819-823, Morgan Kaufmann.
Mooney, R.J. 1990a. A General Explanation-Based
Learning Mechanismand its Application to Narrative
Understanding, Morgan Kaufmann.
Mooney, R.J. 1990b. Learning Plan Schemata From
Observation: Explanation-Based Learning for Plan
Recognition. Cognitive Science, 14: 483-509.
Newell, A. 1982. The Knowledge Level. Artificial
Intelligence, 18: 87-127.
Pelavin, R.N. 1991. Planning With Simultaneous Actions
and External Events. In Reasoningabout Plans, eds. J.F.
Allen, H.A. Kautz, and J.D. Tenenberg, pp. 127-211,
Morgan Kaufmann.
22
Quast, K.J. 1993. Plan Recognition for Context-Sensitive
Help. Proc. ACMConference on Intelligent
User
Interfaces, pp. 89-96.
Schank, R.C. 1986. Explanation Patterns: Understanding
Mechanically and Creatively,
Lawrence Erlbaum
Associates.
Schank, R.C. and Kass, A. 1990. Explanations, Machine
learning, and Creativity. In Machine Learning, An
Artificial Intelligence Approach, Volume III, eds.
Y. Kodratoff, R.S. Michalski, pp. 31-48, Morgan
Kaufmann.
Schank, R.C. and Riesbeck, C. (eds.) 1991. Inside CaseBased Reasoning, Lawrence Erlbanm Associates.
Seel, N. 1990. From Here to Agent Theory. AISBQ72.
Spring: 15-25.
van Beck, P. and Cohen, R. 1991. Resolving plan
ambiguity for cooperative response generation.
Proc.Tenth AAAI, pp. 938-944.
van de Velde, W. 1993. Issues in Knowledge-Level
Modeling. In J.-M. David, J.-P. Krivine, and R.
Simmons(eds.), Second Generation Expert Systems.
Springer-Verlag, pp. 211--231.
Vilain, M. 1990. Getting serious about parsing plans: A
grammatical analysis of plan recognition. Proc.Ninth
AAA/,pp. 190-197, Boston, MA.
Wilensky, R.W. 1981. Meta-Planning: Representing and
Using Knowledge about Planning in Problem-Solving
and Natural Language Understanding..
Cognitive
Science, 5: 197-233.
Wilensky, R.W. 1983. Planning and Understanding: A
Computational
Approach to Human Reasoning,
Addison-Wesley.