From: AAAI Technical Report FS-93-04. Compilation copyright © 1993, AAAI (www.aaai.org). All rights reserved.
Extracting a Domain Theory from Natural Language to
Construct a Knowledge Base for Visual Recognition
LawrenceChachereand Thierry Pun
ComputerScience Center, University of Geneva,
24 rue General Dufour, CH-1211Geneva4, Switzerland
e-mail: chachere@cui.unige.ch
Introduction
Ascomputervision research shifts fromsmaller applications to more general object recognition problems
whichinvolveverylarge sets of object classes, there is
an increasing amountof interest in feature indexing
schemes.Feature indexing raises the important issue
of howto construct a knowledgebase of associations
betweenkey discriminative features and their respective object classes. It is clear that someamountof automationis necessaryin order to build such knowledge
bases for verylarge recognitionsystems.
Visual recognition is a very difficult domainfor machine learning. Concept formation has two components: 1. finding appropriate attributes whichgive a
well-behavedclass membership
function, and 2. given
attribute vectors, finding the class membership
function. Althoughmost learning has been concernedwith
the latter problem,the first is at least as importantfor
manydomains,and probably more difficult [Rendell,
1990]. Whilethe idea of using inductive learning to
generate object class descriptions for a computervision systemis not new, e.g., [Shepherd1983; Lehrer
et. al, 1987; Cromwell
and Kak1991], attribute selection has tendedto be either ad hoc or application oriented, since there is no universally established set of
appropriatevisual attributes.
Anadditional difficulty whenconsideringvision problemsis that manyof the existing similarity-based inductive learning systemsare not directly applicable if
one takes into account the large numbersof training
examplesthey typically rely on. Thereexists biological ~videncethat it is possibleto formulategoodprototypes with very fewa’aining examples,e.g., [Cerella,
1979].Atopic that is currentlyreceivinga lot of attention in machinelearning is the integration of domain
theory within existing empiricaltechniques[Lebowitz,
1990]. Domainknowledge reduces the burden imposedon statistics for ensuringcorreclnessof output.
This paper describes a proposedapproachfor learning
characteristic features of objects whichis beingdeveloped for use by the GenevaVision System[Pun 1990].
The following section introduces the use of natural
languageas a heuristic knowledge
source of visual information[Cbachere,1992]. The next two sections di-
vide the concept formation problem in terms of
defining appropriateattributes (extraction of natural
languagedefinedfeatures) and inductivetraining. The
final section showssomeresults that have thus far
been obtained on an application domainof leaf images.
Natural Language as a Knowledge Acquisition Heuristic
Oursystemconsidersa feature significant if it is encodedas an adjective in natural language.Thusan attribute is deemedappropriateif it can take the value
of one or morenatural languagefeatures. There are
several advantagesof this feature selection criterion.
First, natural languageis an extremelyrich and reliable source of perceptual information.Secondly,concepts defined by natural language are easy to
understandby humans,e.g., it is mucheasier for a
person to determinethe correcmessof output fromthe
hue attribute than an ad hoc attribute suchas an ’excess red’ ratio, whichis commonly
derived from the
red/green/bluerepresentation of color images.Understandability of parametersis helpful for mostcomplex
AI problemswhichare difficult to theoretically verify.
A third advantageis that verbal feature values can
serve as heuristics during the induction process. For
example,yellow can be considereda significant numericalinterval withinthe hueattribute.
Perhaps the maininconveniencewith a natural languagecriterion is that lowlevel vision methodsfor
deriving manyof these features are not readily available. Vision methodshave generally been customized
for easily derivable numericfeatures, e.g., compactness, elongatedness,and various other aspect ratios,
withouta deepinvestigationof the utility of the various features for higher level object classification
tasks. Naturallanguagefeatures tend to be symbolic;
thus, the inevitable necessityof translating signals to
abstract higher level representations is immediately
put to question.
Extraction
of Natural Language Features
A library of symbolic features was constructed
through a systematic search for adjectives, by means
85
of standard references (computerizedWebster’s English dictionary and Roget’s thesauruses). A vocabulary of 102 common
adjectives describing shape and
color has beenobtained, for whichfeature extraction
techniquesare being developed.The shape adjectives
are either global(e.g., triangular,oval, cordate),contour-descriptive(e.g., smooth,dentate, jagged),or localized (e.g., pointed, rounded, or notched). Some
shape features can be further characterized by more
specific adjectives, e.g., dull or sharp-pointed.Color
adjectives consist of a basic set and subcolors of
members
of the basic seL Thebasic set is definedby a
recent study of 98 different languages [Berlin and
Kay,1991] whichsuggesteda linguistic universality
and evolution towards 11 basic color terms (white,
black, red, green, yellow, blue, brown,gray, orange,
purple, and pink). Textureand spatial adjectives are
also important,but are moredifficult and will be considered in future work.
The imagesignal to symboltransition is a knowledge
engineeringtask whichvaries fromfeature to feature.
Whilea few of these features have absolute definitions, the majority do not. The approachwe use for
extracting shape features is basedon contour analysis. Contourchains are created using a Sobeledgedetector. Global shapedescriptors are then derived by
template matching.To determinewhetheran object is
triangular, an ideal geometrictriangle is superimposed onto the region enclosedby the contour chain
outlining the object. If the ratio of overlapbetween
the twoareas is extremelyhigh, triangular is assigned
as the global shape. A threshold for ratio of overlap
255
white
will alwaysbe somewhat
subjective, but is systematically determined by measurementstaken on sample
triangular-shaped images. Regardinglocalized shape
descriptions,it is difficult to determinethe significant
locations on an object where local measurements
should be obtainedwithout the use of heuristics. One
possibility is to use simpleverbal heuristics. For example, our implementationwill routinely examinethe
baseandtop of an object, or to the tip of a protrusion
of an object.
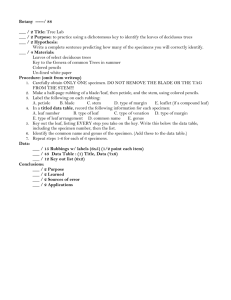
For the purpose of color characterization, a color
nameknowledgebase was created by processing imagesof labelled color samplesand computingtheir respectivehue, lightness, and saturation values fromthe
RGBimage signals. The examplesincluded a prototype sampleof each basic color, borderline samples
(e.g., borderlinereds: orangered andviolet red), and
proper sub-colors (e.g., red shades: maroon,scarlet,
etc.). It is importantto considerthat lightness greatly
influences the definitions of basic colors whichare
generallythoughtof as hues, both linguistically [Bettin and Kay, 1991] and biologically (the BezoldBruckeEffect) [Wyszeckiand Stiles, 1982]. For example,the conceptof yellow implies a high lightness
value; a ’yellow’hue with a low lightness value will
be perceived either as brownor green. Since it is
probablynot possible to define perfect regular functions, in particular within the hue-lightnessplane for
chromaticcolors in basic set (Figure 1), assignment
a basic color to an unlabeledregion is accomplished
using a nearest neighborschemein the 3-dimensional
HLSspace.
pink
:
¯...........
e’::i
.............
oralagq.¯
o e.
..’¯¯
’"
....
¯.......
"%L-o/o/ /
W. ¯" -: //
red..’-....’/
..e
"?:r.-
~’"
b2...... grn~---.
....
ce ..........
" .....
¯ .........
~ blue
*
1.0
’o
purpl~
....
¯ ’ ........,O"
Ill
=
0
Y
O. ~ ~ .-
o
,.
0
black
..O ",’,
/ Ogl
2.0
3.0
4.0
5.0
6.0
hue H
2x(=0)
Figure 1: distribution of color sampleson hue-lightnessplane;gl, g2 are twosub-colors of green,
respectevelyParis green and olive green) g2 is an extrememember
of the green class.
86
Given HLScoordinates of a fairly homogeneously
coloredregion of an image,a color description is attached as follows. A nearest neighbor within the
knowledgebase of colors is determined using a
weighted Euclidean distance measurement.The regionRis assignedthe basic color of its nearest neighbor (Fig. 1, R---> gl ~ green), unless the nearest
neighboris an exa’emedata point (e.g. g2) within its
basic color class and the distance of the region’s HLS
to the class prototypeis larger than the distance betweenthat nearest neighborand the class prototype.
If such a case arises, the region is characterized as
’undefinedcolor’, indicating a gap in the knowledge
base. Sincecolor termsare definedsubjectively rather than functionally, it seemsinappropriate to have
the systemstatistically guess color labels in unchartered areas of the HLSspace.
In addition to the assignmentof a basic color, a region mayalso be modified with more detailed features.If the HLSof a region is extremelyclose to the
HLScoordinatesof its nearest neighbor,it will also
acquire the subcolor label of the neighbor. Various
adjectives whichmodifythe basic color description
(e.g., pale, dark,light, greenish)are attachedif applicable. For example,dark is appendedto a blue region
whichhas a relatively lowlightness value within the
blue class of blue colors. Standarddefinitions of subcolors help to define thresholds for these modifiers.
For example,navy and indigo ate dark shades of blue
by definition, and thus are the lightness values corresponding to these samples within the knowledge
base.
Training
Training in our systemis accomplishedusing images
of labelled objects. The label will include a basic
class name,and optionalhierarchical links to broader
classes. It is assumedthat all examplesare labelled
withbasic level categories[Rosch,1978].It is possible that two randomclass membersof a very broad
category are likely to have morevisual differences
than similarities. Nevertheless,if higher level taxonomiccategories are supplied, the systemtries to formulate conceptsin the samemanneras for the basic
categories. This use of taxonomic knowledgecan
greatly help to economizethe learning procedure,
since it allows evidenceto be shared betweensibling
classes via inheritance froma parent category.
Both numericand symbolic data are supplied from
the feature extraction routines discussedin the previous section. Symbolicvalues alwayscorrespondto a
natural languageadjective. Numericinformationcannot be ignored,since it is possiblethat certain numeric ranges within an attribute maynot mapto any
natural language symbol. Whena new example is
87
supplied for a given class, all data is gatheredfrom
previous examples.Generalizedfeatures are created
by applyingbasic generalizationoperators are to each
attribute; interval closingfor numericvalues, and tree
climbing and disjunction for symbols[Michalski,
1983].
Thenext step after generalizationis to evalutate each
generalized feature. This is accomplishedby simple
measurements
of intraclass similarity and interclass
differences:
Similarity =
fraction of class samplesequal to symbol
rank of symbolin class
symbols
Differences = (cl * numberof completeclasses discriminated by feature) + (c2 / overall frequency
feature)
It is emphasized
that if the set of attributes definedin
the previoussection is adequate,the statistical task
neednot be complicated.The similarity function decreases significantly with each symboladdedto a disjunction, but does allow for exceptions. For example,
an observation of 50 diamonds,47 white, 1 yellow, 1
pink, and 1 blue, wouldyield --=> .94/1 + .02/2 + .02/
3 + .02/4 = .962, indicating that white is generally
characteristic of diamondsdespite the variety of different exceptions.Interclass discriminationis not accomplished by an exhaustive proof that a given
combinationof features will uniquelydistinguish a
concept, but rather a by measuringthe discriminative
powerand uniquenessof individual features, cl and
c2 in the aboveequation are weightedcoetficientss,
respectively corresponding to discrimination and
uniqueness.
Additionalevaluation factors include inheritance (a
feature is not characteristic of a basic class if it is
characteristic of a parent class) and wordcommonality biases derived from wordcorpuses (higher weight
is given to features whichare morecommonly
used in
natural language). For simplicity of discussion, the
important topic of spatial relationships, such as
above(Part-A, Part-B), has been avoided. However,
we are currently investigating natural languageheuristics to help reduce someof the complexityof this
problem. Regular or common
patterns can be represented as unarypredicates, rather than binary or higher order predicates, in terms of adjectives such as
palmateor 4-legged.
Aset of characteristicfeaturesfor an objectclass is finally producedby ranking all the evaluatedfeatures.
The highest ranking features are chosenas characteristics, whilefeatures withlowevaluationsare discarded. Since the purpose of the output is for indexing
rather than a completerecognition,it is only important
that the selected features are goodkeys for recognition, rather than an exhaustiveconceptdescription of
the object class. It is importantto note that the independenceof these output characteristic features makes
themsuitable to a variety of recognition procedures
(e.g., decision trees, parallel discrimination procedures).
An Example
For the purposeof testing the learning system,a database was created consisting of 275 images of noncompoundleaves from Europeanbroadleaf trees. The
data set consists of 55 differenct classes, 5 examples
of eachclass. Thesize and distribution of this data set
was established for two purposes: 1. To demonstrate
the ability to formulate goodconcept descriptions
fromsmall sets of training examples;and 2. To dem-
onstrate the ability to deal with discriminationproblems involving large numbersof different classes.
Eachleaf imagein this databaseis attached with four
labels, a species name(the basic category), a genus
name(e.g., maples,oaks), a family name(e.g., beech
family, whichincludes oaks, beeches, chesmuts)and
the inclusivelabel "leaf".
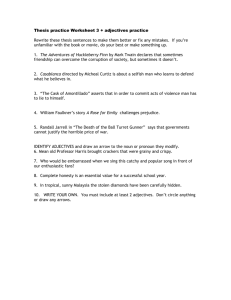
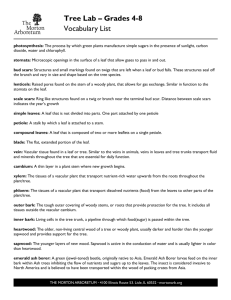
Table1 displays initial results by based upontwoof
the feature functions, for the purposeof demonstrate
discriminationof three selected leaf classes fromthe
database(Figure 2). Theapexof each leaf waslocated
by finding the axis of symmetry
and assumingthat the
leaves were oriented with the apexat the top of the
image.Theapex angle feature is computedby measuring the angle of the two edges extending from the
apexpoint. Leaveshavetwosignificant parts, a blade
and a petiole and therefore a color wasdeterminedfor
both subregions.
to
black alder
apricot
lemon
Figure 2: exampleimagesselected from3 of the 55 leaf classes.
Leaf
Apexangle
Apex shape
description
HLSvalues of blade and
petiole
Colordescriptions
lemonI
1.2383
pointed
(2.34,126,63), (2.13,206,51)
green / yellow
lemon2
1.25
pointed
(2.31,119,63),(2.11,199,50)
green/yellow
lemon 3
1.0264
pointed
(2.38,155,69), (2.12,174,51)
yellowishgreen / yellow
apricot 1
1.5611
pointed
(1.75,88,45), (1.12,175,51)
dk brwnishgreen/darkpink
apricot 2
1.4745
pointed
(1.88,92,46), (0.98,100,59)
dark brownishgreen / red
apricot 3
1.419
pointed
(1.72,86,46), (0.99,123,58)
dark brownishgreen / red
blackalder 1
3.8281
notched
(2.32,1.05,60), (2.25,165,54)
green / yellowishgreen
black alder 2
3.4735
noshed
(2.09,97,55),(2.25,166,50)
green / yellowishgreen
black alder 3
3.5457
notched
(2.32,110,59), (2.32,163,48)
green / yellowishgreen
Table1: extracted features. Apexangle ranges from0 to 2g, values are "pointed"if < x, "notched"if >
n, "straight" if veryclose to ~. HueHranges0 to 2r¢ wherepurered---m/3,puregreen--n,pureblue---5x/3.
LightnessL ranges from0 to 255where0=blackand 255=white.Saturation S is a percentage.
88
Basedon the data in Table 1, the training procedure
makesthe followingcharacteristic features: apricot -->
dark brownishgreen blade, pointed apex, red or dark
pink petiole; black alder --> notchedapex, yellowish
green petiole; lemon~ yellow petiole, pointed apex;
leaf --~ green blade. Sincethe three examplesare from
different families, no descriptions are formulatedat
that level. Withmoreexamplesof different leaf classes, petiole color=yellowishgreen will becomea default leaf characteristics rather than a black alder
characteristic. Thesystemwouldalso eventually learn
that red/darkpinkis a veryrare petiole color and thus
it should emergewith a higher ranking within the set
of apricotleaf characteristics.
ries in the Pigeon. Journal of ExperimentalPsychology: Human
Perception and Performance,5.
Chachere, L.E (1992). ReasearchSummary.In workshopnotes, ConstrainingLearningwith Prior Knowledge, AAAI-92,78-80.
Cromwell, R.L. and Kak, A.C. (1991). Automatic
generationof object class descriptions using symbolic learning techniquesIn Proc. of the 9th National
Conf.on Artificial Intelligence, 710-717.
Lebowitz,M.(1990). The Utility of Similarity-Based
Learningin a WorldNeedingExplanation. In Michalski, R.S., and Kodratoff,Y. (eds.), MachineLearning:
AnArtificial Intelligence Approach,volume3, chapter 15, MorganKaufmann.
Lebrer, N.B., Reynolds,G. and Griffith, J. (1987).
Initial HypothesisFormationin ImageUnderstanding
Using an Automatically Generated KnowledgeBase.
DARPA,
Image Understanding Workshop,520-537.
Theresults for these examplesmatchthe classification
descriptions are close to whatone wouldfind in a typical field guideto trees. Thebladecolor of the apricot
leaves is an exception.TheHLScoordinates of those
examplesactually mapinto an undefinedregion within the color knowledge
base slightly closer to a green
data point than the next nearest neighbor, a brown
point. Furthermoreit has beendeterminedthat the numerical values are not quite correct. Thediscrepancy
wastraced to a loss of accuracyin the imageacquisition process, using a PerfectScanTM Mikrotek600Z
scanner. Higherquality scanners and camerasfor imageacquisitionare likely to producebetter results.
Lenat, D.B. and Guha, R.V. (1989). Building Large
Knowledge-Based
Systems: Representation and Inference in the CycProject. Addison-Wesley.
Michalski, R.S. (1983). A Theoryand Methodology
of InductiveLearning.In Michalski,R.S., Carbonell,
J.G., and Mitchell, T.M. (eds.), MachineLearning:
AnArtificial Intelligence Approach,chapter 4, Morgan Kaufmann.
Pun, T. (1990). The GenevaVision System:Modules,
integration and primal access. TechnicalReport no.
90.06, ComputingScience Center, University of
Geneva.
Rendell, L. (1990). Commentary
to Lebowitz, M.,
The Utility of Similarity-BasedLearningin a World
NeedingExplanation.In Michalski, R.S. and Kodratoff, Y.(eds.), op.cit.
Conclusion
Theultimategoal in this research is to formulategood
visual conceptsabout object classes in an efficient
manner,without relying uponlarge numbersof training examples.There are still manynatural language
features which remain to be developed. The task of
extracting such features mayseemarduous. However,
webelieve that there is no shortcut for difficult AI
problems;perhaps the key element is to havelots of
knowledge[Lenat and Guha, 19891. The uncertain
rate of progress towardsa general visual recognition
system indicates that such an effort maywell prove
worthwhile.
Rosch, E. (1978). Principles of Categorization.
Rosch,E. and Lloyd, B.B. (eds.) Cognitionand Categorization, 28-39, LawrenceErlbaumAssociates.
Shepherd, B.A. (1983). Anappraisal of a decision
tree approachto imageclassification. In Proceedings
of IJCAI, 473-475.
Wyszecki,G. and Stiles, W.(1982). Color Science:
Concepts and Methods,Quantitative Data and Formulae. Wiley.
Acknowledgments
This research is supported by a Swiss National Research Fund grant, 20-26475.89. The authors would
like to express their deep gratitude to Catherine de
Garrini for her major role in the implementationof
feature extraction of shapeadjectives.
References
Berlin, B. and Kay, P. (1991). Basic Color Terms:
Their Universality and Evolution.University of California Press, Berkeley,CA.
Cerella, J. (1979). Visual Classes and NaturalCatego-
89