Document 13779983
advertisement

From: AAAI Technical Report SS-99-05. Compilation copyright © 1999, AAAI (www.aaai.org). All rights reserved.
Algorithms for the Design of Networksof Unmanned
Aerial Vehicles
Shankar S. Sastry
University of California, Berkeley CA94720
At Berkeley we have been interested in design schemes for network of complex networks
of semi-autonomousagents. These networks are characterized by interaction between discrete
decision making and continuous control. The control of such systems is often organized in
hierarchical fashion to obtain a logarithmic decrease in complexity associated with the design,
Wehave used as examples three classes of systems to motivate the design approach:
1. Intelligent
Vehicle HighwaySystems (IVHS)
2. Air Traffic
ManagementSystems (ATMS)
3. UnmannedAerial Vehicles
Over the last five years or so, a group of us have developed a set of design approaches which
are aimed at designing control schemes which are live, deadlock free, and "safe". Our design
methodologyis to be considered an alternative to the verification based approaches to hybrid
control systems design, and is an interesting blend of gametheoretic ideas, fault handling in a
probabilistic framework, mathematical and temporal logic and planning ideas from robotics. In
this talk, I will focus on design problems involved in coordinating groups of UnmannedAerial
Vehicles (UAVs). Problems to be addressed include:
1. Rapid prototyping of real time control laws: a hybrid systems design and simulation
environment.
2. ModeSwitching and envelope protection.
3. Vision based control for navigation.
4. Mission planning for multi-UAVmissions.
The work is joint with Claire Tomlin, John Lygeros, Datta Godbole, George Pappas, John
Koo, David Shim, Joao Hespanha, Omid Shakernia, and Hyoun Jin Kim.
210
Intelligent Control
Architectures for UCAVs&
Probabilistic Verification
AAAI Spring Symposium Palo Alto
March 21, 1999
Intelligent ControlArchitectures
¯
An architecture design problem for a distributed system
begins with specified safety, efficiency objectives & aims
to characterize communication, sensing & control
¯ Progressto date
- developed
architecture for multi-UCAV
coordinationandcontrol
- implementation
on the SHIFT
simulation/verification testbed
- developedcontrol laws for autonomous
helicopters
¯ On-going research
- multi-UCAV
planning& coordinationdesign
ARO
DAAH04-96- 2
l.N~dl
211
Verification and Design Tools
Research Topics
- Design ModeVerification
- Faulted ModeVerification
- Probabilistic Verification
ARO
DAAH04-96- 3
1,N3d1
Perception and Action Hierarchies
¯ Research Topics
- Hierarchical Vision
- Control Aroundthe Vision Sensor
- Surveillance
Weare designing a perception and action hierarchy
centered around the vision sensor to support the
observation and control functions of air vehicles
¯ Progress to date
- developedtarget recognition and tracking algorithms
- developedtrajectory tracking controller using vision
¯ On going research
- obstacle detection and avoidancealgorithms
- formationflight using active vision
ARO
DAAH04-96-
212
A Design of Hierarchical
Architecture
for Multi-UAV Hybrid Systems
Jin Kim, David Shim, Shankar Sastry
Hierarchical SystemArchitecture
Main Controller
Mission
Tactical
Information for
coordination
Planner
~-~
~ [ Tac!ical
Planner ] ~-
ARO£)AAH04-961,fl3~il
213
Application
¯ Mission
Areais sweptby 2 helicopters,
whichshouldvisit a sequence
of
targets assignedby main
controller.
¯ Approach
- Tactical Plannersets a series
of suitable modesto ensure the
current target is reached.
- Trajectory Planner generates
desiredpath for helicopter.
- Regulatorwith suitable
techniquesstabilizes the
helicopter system with enhanced
robustness.
DesiredTrajectory
ARODAAH04-961,=q3111
System Structure for each UAV
set modes
Trajectory
Planner
behavior
Regulation]
p - synthesis
~. ~. A,.B~
t,
1~.>.:
, v..J.:,
r
Helicopter
Dynamics
rqk,O,v/,P,q,
AROOAAH04-961~3~1
214
Techniquesfor Regulator Design
Nonlinear Tracking Controller
- nice transient and steady-state responsewith nominalcase only
- very sensitive to modelchangeand disturbance
- computationally expensive
p- Synthesis Controller
- tradeoff betweenthe robustnessand the tracking performance
- satisfactory robustnessto modelperturbation
- modelsthe noise characteristics of the sensor system
- specifies the performance
objective quantitatively
ARODAAH04-96- 9
1~3dl
Tool for Simulation - SHIFT
¯ object-oriented : accommodates
structural design -> modularity
¯ precise interpretation as dynamicnetworksof interacting hybrid systems
¯ can serve as languagefor systemspecification and simulation, and as
meansof team coordination
¯ Prototype-baseddescription
type Helicopter {
input.., whatwefeed to it
output ... what wesee on the outside
state ... whatis internal
data mod,
discrete o.. discrete modes
of behavior
export... eventlabels
flow ¯ ii
1 continuous and discrete evolutic
transition ...
)
setup ... actions executedat create time
l
ARODA
215
10
Probabilistic Pursuit-Evasion
GamesWith Cooperating
UCAVs
Jo~o Hespanha, Jin Kim,
Shankar Sastry,
12
216
The "rules" of the game
ARO
DAAH04-96- 13
1,n3d1
The "rules" of the game
Terrain:
* with fixed obstacles
(tree trunk like)
* not accurately mapped
UAVs(pursuers) capable of:
* flying betweenobstacles
* seeing a region around them
(limited by the occlusions)
Evadercapable of:
* movingbetween obstacles
(possibly actively avoiding
detection)
Objective:
find the evader in minim~go~_e
1.f13d1
217
Scenarios
¯ search and rescue operations
ARO
DAAH04-96- 15
1,n3~1
The "rules" of the game
¯ search and rescue operations
¯ finding parts in a warehouse
ARODAAH04-96- 16
1.q3,~1
218
The "rules" of the game
¯ search and rescue operations
¯ finding parts in a warehouse
¯ search and capture operations
ARO
DAAH04-96- 17
1.N3d1
The goal...
ARODAAH04-g8- 18
219
Divide and conquer...
The design of a swarmof UAVscapable of winning the game
requires the solution of several problems:
¯ Developing strategies to win multi-agent pursuit-evasion games
¯ Mapbuilding by a network of agents:
"Howto combinelocal mapsacquired by the individual agents
into a global map?"
¯ Navigation
(trajectory tracking & obstacle avoidance)
"Howto movethe UAVfrom point A to point B keeping a
minimumdistance from neighboring obstacles?"
¯ Sensingand actuation
"Howto find the evader with the available sensors?"
"Howto model and control a single UAV?"
ARODAAH04-961,n3tll
Hierarchical architecture
A high-level planner capable of
winning the gamewith certain
probability...
relying on
individual UAVscapable of
low level navigation & evader
detection
that rely on vision and actuation
systems
ARO
DAAH04-961.93=11
220
2O
Hierarchical architecture
Hierarchical architecture
A high-level planner capable of
winning the gamewith certain
probability...
relying on
individual UAVscapable of
low level navigation & evader
detection
that rely on vision and actuation
systems
ARO
DAAH04-961 n3~1
221
22
Strategies for pursuit-evasion games
LaValle, Latombe,Guibas,et al. considereda similar problembut
assumethe mapof the region is known,the pursuershave perfect
sensors, andworstcase trajectories for the evaders:
HowmanyUAVs are needed to win the gameinfinite
1 agentis sufficient
time?
2 agents are needed
(nomatterwhatstrategya single pursuer
chooses,thereis a trajectoryfor the enemy
thatavoidsdetect~,~t~9).,.,Ho.g6_
23
1 ,Wtal
Exploring a region to build a map
Deng,Papadimitriou,
et al., studythe
problemof building a map(seeing all
points in the region)traversingthe
smallest possible distance.
standard"keepwall to the right"
algorithm
algorithmthat takes better
advantageof the cameras
capabilities
ARO
DAAHO4-96- 24
1,fi3dl
222
A two step solution..¯
¯ exploration followedby pursuit is
not efficient
¯ sensors are imprecise
¯ worst ease assumptions the
trajectories of the evadersleads to
very conservative results
ARO
DAAH04-96- 25
1,f1381
A different approach¯¯.
Use a probabilistie framework
to combineexploration and
pursuit-evasion games.
Nondeterminism comes from:
¯ poorly mappedterrain
¯ noise and uncertainty in the sensors
¯ probabilistic modelsfor the motionof
the evader and the UAVs
ARODAAH04-96- 26
1,n3111
223
Problem formulation
At each time t:
¯ the pursuers take measurements Yt (positions of enemies and
obstacles seen)
¯ control actions ut are sent to the pursuers (motion control)
A pursuit policy is a function g that maps past measurements to
the next control action:
1"lt+l"= g(Yl, Y2 .... Yt)
Goal: design pursuit policies that "maximize"
probability of finding the evader
ARODAAH04-96- 27
1,/ft=1
Optimalitycriteria
¯ Probability of finding the evader in the next T time steps (to be
maximized)
Jr (t0) = Prob(find an evader from o t o t o +T)
¯ Expected time needed to find the evader (to be minimized)
J* = E{T*
T* - time at which the evader is found
ARODAAH04-96- 28
1,ft3dl
224
Optimalitycriteria
¯ Probability of finding the evader in the next T time steps (to be
maximized)
Io+T
(J,=Pg(to)
J,r(to)=l-I--IO-Pu(t)
I=10
¯ Expectedtime needed to find the evader (to be minimized)
{" /-1
J* =Z tp (t)lI-[
I=l(I
where
~ "~=10
(t) Prob(finding evader at time t, given
that none wasfound up to t)
pg
ARO
OAAH04-96- 29
1=q3=1
Sub-optimal policies
greedypolicy =- pursuit policy that, at each instant, maximizesthe
probability of finding the evaderat the next instant
computationallyvery attractive because it
scales well with the size of the region,
numberof obstacles, etc.
\1
ARODAAH04-96- 30
1,f13d1
225
Sub-optimal policies
greedypolicy - pursuit policy that, at each instant, maximizesthe
probability of finding the evaderat the next instant
¯ Probability of finding the evaderin finite time is one, i.e.,
Prob( T* < oc ) = 1
T* -= time at whichthe evader is found
¯ Expectedtime neededto find an evader is finite, e.g.,
J* = E{T*}<
area
n. of pursuers
when a randomly movingevader is pursued by UAVsthat can
checkany single unit of area at each instant of time
ARO
DAAH04-96- 31
1,fl3til
Map building
Problem:
For given paths of all the UAVs,howto fuse the data sensed by each
of them(in real-time) to build a global map?
ARO
DAAH04o96- 32
1,f13d1
226
Probabilistic mapbuilding
Prob(maplnewdata & old data)
= k Prob(newdatalmap) Prob(map[olddata)
Problen~:
For give~[ paths of all the UAltkrs,howto fuse the data sensed y each
of themfin real-time) to b~l~I~r ~ofld~lmao?
ARO
DAAH04-96- 33
1=q3d1
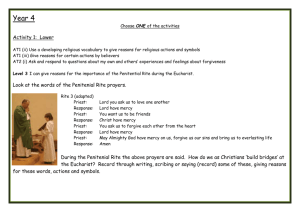
Simulation
(greedy policy)
obstacles
evader
(positions unknown
in advance)
(Markov motion)
Q
UAVs
probability of
evaderat cell
(see adjacent cells)
(white--- low,
black-= high)
ARODAAH04-96- 34
1.n341
227