How to Overcome Translation Mismatches - Representations
advertisement

How to Overcome Translation
An Inference
Mismatches -
Driven Mapping between Meaning
Representations
Bianka Buschbeck-Wolf
Institut ftir Maschinelle Sprachverarbeitung
Universit~it Stuttgart
Azenbergstr. 12
7000 Stuttgart 1
bianka@ims.uni-stuttgart.de
Abstract
This paper deals with issues that a bidirectional GermanRussianmachinetranslation systemfaces whenthe meaning
of spatial prepositionsin these languagesdoesnot line up.
A uniform representation languageis used to define the
meaningof spatial prepositions in a languageindependent
way. This formal language makesit possible to compare
monolingualmeaningrepresentations and allows for the
recognitionandresolutionof translation mismatches.
0. Introduction
The mainproblemfor multi-lingual machinetranslation
(MT)is that "there is no hopeof constructinga language
[interlingua]whichis suchthat translationsin all languages
maponto a single abstract representation in IL" ([KAY
1991], p. 78). Evenif the ambitionsof the IL approachare
confinedto the designof a meaning
representationmediating
betweentwo languagesthere are manytranslation mappings
whichcannot share the samerepresentation. Becauseof
translation mismatchesintra-lingual mappingsbetweenIL
representations
are often inevitable.
There are several waysto solve translation mismatches.
[KAMEYAMA
1991] proposes to add or to drop information dependingon whetherthe target language(TL)renders
the expression more precise or allows ambiguity not
allowed in the source language (SL). The IL approach
taken by [BARNETT
1991] appeals to a monolingual
language description where translation mismatchesare
viewedas generationproblems.Herethe generator includes
techniques that assign preferences to a certain wayof
expressingan assertion and makesuse of SLinformationto
guidethis assignment.
This paper contributes to the issue of howthe translation
24
mappingbetween non-identical meaningrepresentations
can be achievedin an efficient wayby preservinglanguagepair independence
in the lexicon. I sketch an approachof an
inference driven mappingbetween monolingual meaning
representationsandwill applyit to the problemof translating between Germanand Russian spatial prepositions,
whichare a well-known
sourceof a widerange of translation
mismatches.For the locative prepositions considered I
proposemeaningrepresentations whichexpress the spatial
relation betweentwo concrete objects. Therepresentation
languagefor spatial prepositionsis basedon tools fromsettheoretic topology,i.e. objects are representedas sets of
spatial points and the relations betweenthemare expressed
in termsof inclusion, overlapandconnectedness.
Theproposedmeaningrepresentations for the Germanand
Russianlocative prepositions can be used to infer whether
the meaningof the target languagepreposition is identical
with, moregeneral or morespecific than that of the source
language, ThesecorrespondencesbetweenSLand TLrepresentations are established by use of identity, superset and
subset relations betweenthe sets of spatial points expressed
in the prepositions’meaning
representations.Followingbasically the ideas of the "Translation-by-Negotiation-Approach"
proposed by [KAY1991] myapproach makesexplicit how
translation mismatchescan be recognizedand consequently
resolvedby a "negotiator" whichoperates on languageindependentknowledge.
First, I give a surveyof someof the translation problems
weare faced with. Second,I presentthe formalrepresenta:
tion languageand focus morespecifically on issues that
concernthe meaningrepresentationof spatial expressionsin
the lexicon. Then, I showhowthe correspondencebetween
SLand TLrepresentationsis established. Finally, I propose
a translation modelwhichinvolves an inference driven
mappingbetweenmeaningrepresentations and give an idea
of the organizationof the lexicon with respect to spatial
propertiesof objectsandrelations betweenthem.
as in (5), is coveredbythe Russianpreposition"na" (’on’).
But"na" has a widerdomainof application. It highlightsthe
contact with any surface of its reference object. This is
shownin the examples
(3’-8’).
(3) das Buchauf demTisch
(3’) knigana stole
(’the bookonthe table’)
1. The Translation Picture
(4) der Schomsteinauf demDach
(4’) truba na kryge
I consider spatial relations betweentwo concrete objects
expressedby the German
locative prepositions"in" (’in’),
(’the chimneyon the roof)
"auf"(’on’), "an"(’on, nextto’) andtheir Russianequivalents (5) der SchweiB
auf/an der Sfim
"v" (’in’), "na"(’on’) and"u" (’nextto’) respectively,as
(5’) pot na Ibu
occur in expressions of the form"der K~eauf demTisch"
(’sweaton the forehead’)
(’the cheeseon the table’), wherethe PPis a modifierwhich II. b Specification
attributes the propertyof beinglocated"on the table" to the
Thedifferentiation between
spatial relations capturedin the
individual "cheese".Furthermore,the localized object (LO) TLis not expressiblein the SL, i.e., the meaningof the SL
"cheese"is situated with respect to a particular spatial
preposition is expressedby morethan one TLpreposition.
portionof its referenceobject (RO)"table", namelyits top
Weare faced with a specification in the TL whichis not
madein the SL. If wetranslate the Russianpreposition"na"
surface,referredto bythe preposition"auf"(’on’).
(’on’), whichprimarilyrefers to any surface of its RO,
Withregard to these simpleexpressionsof spatial relations
in Germanand Russian we maydistinguish the following have to choose betweenthe Germanprepositions "an" and
typesof translationpattern:
"auf". Boththese prepositionscapture this meaning,as can
be seen in (6-8). Asimilar problemarises if wetranslate
L Equivalence
"an" (’on’, ’next to’) into Russian,as in (7-9). Here
If two prepositions in different languagesshare the same (’on’) is usedif there is contactwiththe RO’ssurfaceand"u"
meaningthey are assumedto be equivalent. Thepreposition (’next to’) if the LOis situated in the neighborhood
which
"in" (’in’), for example,capturesthe sameset of interpreta- surroundsthe RO.This is shownin (7’,8’) in contrast
tions as the Russianpreposition"v" (’in’), i.e., the inclusion (9’):
in an emptyas well as in a materially occupiedinterior.
(6’) pirogna tarel’ke
This is shown
in the examples
(1-2) and(1’-2’) respectively: (6) der Kuchenauf demTeller
(’the cakeonthe plate’)
(1) die Milchin der Flasche
(1’) molokov butylke
(7’) kartinana stene
(’the milkin the bottle’)
(7) das Bild an der Wand
(’the paintingonthe wall’)
(2) der Fisch im See
(2’) ryba v ozere
(8’) list’ja na vetke
(’thefish in the lake’)
(8) die Blatter amAst
(’the leavesonthe branch’)
II. Translation
mismatches
(9’) derevou doma
Translation mismatchesinvolve cases whereone language (9) der Baumam Haus
encodesa spatial relation not directly expressible in the
(’the tree nextto the house’)
other. Herethree differentkindscanbe distinguished:
IL c Idiosyncrasie~
II. a Generalization
Alanguagespecific idiosyncratic use of a preposition is
The TLpreposition has a moregeneral meaningthan the
anotherreason for a translation mismatch.This problemis
SLpreposition. E.g., the meaningof the Germanprepowidelydiscussed and most often handledin the cognitive
sition "auf" (’on’), whichrefers primarilyto the top surface frameworkof prototype semantics. Cognitive semanticists
of its referenceobject, as in (3, 4), andwhichcan be used explainthe idiosyncraticuse of a prepositionby a distinct
to refer to a vertical surfaceonly in a veryrestricted way, languagespecific conceptualization
of spatial entities. These
25
ideas are also reflected in MTapproaches to locative
prepositions
[JAPKOWICZ/WIEBE
1991] and [ZELINSKYWIBBELT
1990]. They represent the preposition’s meaning ’as an idealized spatial relation between spatial entities
schematized as volumes, surfaces or points. I treat spatial
entities according to the way they appear in our world and
not as they maybe conceptualized occurring in connection
with a certain preposition. Moreover, it does not always
seem to be appropriate to think of a surface when the
Russian native speaker uses the preposition "ha" (’on’) for
referenceto an interior, as in (10’, 11’):
(10) Weizenin der Miihle
(10’) pgenica na mernice
(’wheatin (on) the mill’)
(11) die Maschinenin der Fabrik
(113 stanki na fabrike
(’machinesin (on) the factory’)
This use of the preposition "na" (’on’), which is rather
productive in Russian, can be explained only historically.
With manynouns, particularly with proper nouns as place
names, the use of the preposition "na" is determined by
linguistic convention. In somecases where "ha" is used with
a nounwhichdenotes a building, the influence of the institutional reading, whichis also expressed by this preposition,
accounts for that use. Nowadaysthe meaning of such an
expression is obviously inclusion in an interior without any
necessary contact with a surface. On the other hand, it is
more reasonable to think of a different conceptualization
whenthe object has an intermediate shape (e.g. between
surface and a container) which may explain this usage of
"ha". This is shownin (12’, 13’):
(12) das Ei in der Pfanne
(12) jajco na skovorotke
(’the egg in (on) the pan’)
(13) der Sportlerim Stadion
(13’) sportsmen na stadione
(’the sportsmenin (on) the stadium’)
But even if one might be able to explain the use of the
Russian "ha" discussed above, there is no way to predict
which objects in particular can be combinedwith that preposition. Therefore, objects whichare used with a preposition
in an idiosyncratic wayhave to be markedin the lexicon.
2.A formal representation
for spatial relations
In recent years a: widerange of approachesto spatial relations
has appeared, for example, the prototype semantics approach
taken by [HERSKOVITS
1986, LAKOFF1987] or the two
level approach proposed by [BIERWISCH1988, LANG
1987, HERWEG
1988]. But among the great variety one
can find only a few approaches which aim at a formal
semantic representation for spatial prepositions, e.g., those
taken by [LUTZEIER 1974, MOILANEN1979] and
[AURNAGUE/VIEU
1992].
In contrast to a prototype semantics approach, which puts
forward the idea of an "idealized meaning", or a two level
approach, which assumes a primitive meaningon a semantic
level which is then more finely articulated at a second
conceptual level, I define the meaningof a spatial preposition as the disjunction of all its possible interpretations. The
relation of the type ’%0 LOCATIVEPREPOSITIONRO"
is understoodas a relation betweenspatial entities wherethe
spatial referent of the ROis determined by the preposition
and the LOis mapped onto that portion of space which
actually participates in the spatial relation.
In order to understand the prepositions’ meaningrepresentations I will briefly introduce someformal specifications of
the representation language used here. For more details see
[BUSCHBECK-WOLF
1993].
Spatial properties of objects, and the relations between
them, are expressed in terms of set-theoretic topology. In
other approaches, like [AURNAGUE/VIEU
1992], the representation of spatial prepositions is based on connection
theory [CLARKE
1981], where spatial entities are regarded
as individuals. Here, following [LUTZEIER
1974, MOILANEN1979], spatial entities are defined as sets of spatial
points. Thus, spatial prepositions denote relations between
particular subsets of these point sets. Theserelations are
expressed in terms of inclusion, overlap and connectedness.
Now,let me make the following assumptions:
I is a set of concreteobjects a, b, c .... <P, N>is the threedimensional Euclidian space. <P, N> is a metrical and
connectedtopological space.
Let us consider the space P(a) which is taken up by
object "a" in moredetail. It is definedin (14).
(14) P(a) = {p E P I p is occupiedby a
P(a) ~
VaVba, b ~ I:
(P(a) # O ^ P(b) # ~ ^ P(a) = P(b))
26
language
Definition (14) says that the space P(a) whichis taken up
the object "a" consists of all spatial points which are
occupied by that object. P(a) is a subset of the Euclidian
space. Furthermore, it is excluded that two objects may
occupythe same space.
There are objects, as e.g. cupboardsand vases, with respect
to which one has to distinguish between the space which is
occupied by their material parts, as e.g. by the woodof a
cupboardor the porcelain of a cup, and their emptyinterior,
whichalso belongs to the space these objects occupy. I refer
to these spaces with PMAT(a),the set of materially occupied
spatial points, and P~(a), the set of empty spatial
points, whichare introduced in (15) and (16).
(15) PMAT(a)= {p ~ P I p ~ P(a)
p is materially occupiedby a }
PMAT(a)~ P(a)
PMAT(a)
is connected in
(16) P~(a) = {p ~ P I p E P(a)
p is not materially occupiedby a}
PEMPry(a)~ P(a)
The distinction between materially and non-materially
occupiedspatial points allows one to classify spatial objects
in the way, shownin (17) - (19):
(17) PEMI,/~(a) = O and PMAT(a)
i.e. P(a) = PMAT(a)
If an object consists of materially occupiedpoints only, we
have a massive non-hollowbody, as e.g. a stone.
(18) PMAT(a)-- ~ and PEMPTy(a)
i.e. P(a) = PEMPTY(a)
If P(a) contains only non-materiallyoccupiedpoints, "a" is
hollowspace, as e.g. a hole.
(19) PMAT(a)¢ O and ifPEMPTy(a)
i.e. P(a) = PMAT(a)U PEMPTy(a)
If an object occupies some spatial points materially and
some spatial points non-materially, it refers to a hollow
body, as e.g. a cupboard. In this case the space the object
occupies equals the union of its materially occupied space
and its emptyinterior.
The neighborhood of an object, its vicinity PEXT(a),
another region which has to be defined in order to represent
prepositions, as e.g. "near", "by" or "next to". As is shown
in (20), PEXT(a)
is a subset of the topological space which
complementaryto P(a) and has a limited extension, because
another object cannot be localized with respect to "a" at
arbitrary distances. Hence, the distance from any exterior
point of "a" to an interior point of "a" should not be
smaller than a real numberna which has to be contextually
27
determined. It depends on the size, the importance and the
functionality of "a" and on the spatial configuration of the
objects in its neighborhood
(20) PEXT(a) ~ C(P(a))
PEXT(a)= {P’ e P I p’ ~ P(a) A 3p ~ P(a)
such that d(p, p’) _< na }
PEXT(a)is connected in
Anotherrestriction on the localization of an object "g" in
the vicinity of "a" concerns the availability of PEXT(a).
object "g" can be situated in PEXT(a)only in that part
space whichis not occupied by another object. This leads us
to (21) wherea subset of the exterior, namelythe available
exterior PEXT-AVAIL(a)
is defined.
= {P° e PIp° ~ PExr(a)
(21) PEXT-AVAIL(a)
Vb(bE I) pO~ P(b)}
PEXT-AVAm(a)
_c PEXT(a)
The remaining exterior is assumedto be non-available for
the localization of another object. This is shownin (22).
= PEXT(a)\PEXT-AVAIL(a)
(22) PEXT-NONAVAIL(a)
PEXT-NONAVAIL(a)
PEXT(a)
NowI define somesubsets of the available exterior of an
object which one needs for the representation of preposil
tions, such as "above", "below" or "by". These are in (24)
the "available exterior above a" PTOP.EXT_AVAIL(a),
in (25)
the "available exterior below a" PBOTIOM-EXT-AVAIL(a)and
in (26) the "available exterior extending horizontally to
PVERT-EXT-AVAIL(a).
In (23) the distance betweenthe set
points which is occupied by objects "a" and somepoint p’ of
the available exterior is defined as the minimumof the
distances fromany point of P(a) to p’.
(23) d(P(a), p’) = miny{ d(y, p’) I y
p’e PEXT-AVAm(a)}
Then,this distance is given a direction. Here,d+vert(P(a),
denotes the minimaldistance betweenthe object and a point
along the vertical directed against gravity, d_vert(P(a),
stands for this distancedirected with gravity and dhor(P(a),
signifies the distance betweenthe object and a point along
the horizontal, whichis situated orthogonalto the vertical.
= {p’~
(24)PTOP-EXT-AVAIL(a)
PEXT-AVAIL(a)
d+vcrtd(P(a),
p’)0 ^ dhor(P(a), p’) =0}
PTOP-EXT-AVAIL(a)
~ PEXT-AVAIL(a)
(25) PBOrrOM-EXT-AVAm(a)
= {P’~P~T-AVAm(a)
d-vcrtd(P(a),
p’)> 0 ^ dhor(P(a),
p’)
PBOqTOM-EXT-AVAIL
(a) ~ PEXT-A
VAtE(a)
(26) PVERT-EXT-AVAIL(a)=
PEXT-AVAIL(a)\
\ (PTOP-EXT-AVAIL(a)
t..) PBOTrOM-EXT.AVAIL
PVERT-EXT-AVAIL(a)
c_ PEXT-AVAIL(a)
Finally, we need a definition of the object’s surface to which
such prepositions as "an" (’on’) and "auf" (’on’) refer.
According to definition (27), the surface consists of all
materially occupied points s of an object "a", whose
neighborhood contains at least one point p’ which belongs
to the exterior PEXT(a).This definition also predicts that
hollow spaces do not provide a surface, since P(a) contains
only non-materially occupiedspatial points.
(27) S(a)= {se PMAT(a)IVNe
3p’E N p’~ PEXT(a)}
They have to capture all the distinctions made in the
languages involved. But to push the analysis beyond that
would only slow down the system. Here I will basically
make use of topological representations to capture the
meaningof the spatial prepositions. For the prepositions
considered functional relations are ignored since they do not
influence the choice of a TL preposition. In most cases they
are obvious from the spatial configuration between the
involved objects. Here the meaningof a spatial preposition
is represented fully independentlyof any TLrequirements. It
is the disjunction of all its possible interpretations. The
S(a) P(a)
The localization of an object "b" on the surface of "a"
relation of the type "a PREPOSITION
b" where "a" is the
presupposesthe availability of that surface. I call a surface
LOand "b" the ROis valid if and only if one of the possible
available if it is the boundary of an available exterior.
representationsis true.
According to their position in space some subsets of the
TheGermanpreposition "in" (’in’) is represented in (31):
available surfaces can be distinguished: the top surface
(31) a IN b ¢=~ (a) P(a) c PEMPTY(b)
STOp(a),the vertical surface SVERT(a)
and the bottomsurface
(b)
P(a) CPMAT(b
)
"In" provides two distinct interpretations. Onthe one hand
SBo-rroM(a).This is shownin (28) - (30).
(28) STOp(a)={s e PMAT(a)I VN~
the (31a) clause says that the space occupied by the LO
3p’e N p’e PTOP-EXT-AVAIL(a)}
contained in the emptyinterior of the RO(cf. ex. 1). Onthe
STOp(a)c_ S(a)
other hand (31b) accounts for the inclusion of the space
(29) SVERT(a)= {S ~ PMAT(a)I ~/N
which is taken up by the LO in the materially occupied
3p’E N p’E PVERT.EXT.AVAIL(a)} interior of the RO(cf. ex. 2).
The representations in (31) cannot cope with the partial
SV~T(a) ~ S(a)
= {S ~ PMAT(a)I VN¢ N(s)
(30) SBOTTOM(a)
inclusion in an emptyor in a materially occupied interior,
3p’~ N p’e PBOTTOM-EXT-AVAIL(a)} i.e. no truth-value can be assigned to expressions of the type
"the flowers in the vase" or "the nail in the board". I will
SBo’rroM(a)
S(a)
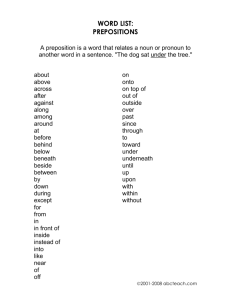
Summarizing the introduced spatial regions, figure 1
skip the definition of partial inclusion here, since it is not
exemplifies someof them for a vase.
essential to further considerations. The preposition "auf"
(’on’) has a morecomplexinterpretation, as can be seen
3. Meaning representations for
(32) a AUFb ¢=~
spatial prepositions in the lexicon
(a) S(a) © STop(b)
NowI will use the defined spatial regions to describe the
(b) (P(a) c7 P(b)) c
meaning of locative prepositions. It should be mentioned
(C) if "a" is a thin surface-likeobject:
that the application to the domainof machinetranslation
S(a) © SVERT(b)
imposescertain constraints on the depth of the prepositions’
(d) if "b" is used idiosyncratically with "auf":
meaningrepresentations.
P(a) c PEMPTY
(b)
vert
=================================
.::~iiiiiii!iiiiiiiiiiiiiiiiiiiiiiiiiiii}iiiiiiiiiii~;
....
PTOP_EXT.AVAIL(a) [the neighborhoodabovethe vase]
.=iiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiii!iiiiii!~::.
[the available top surface of the vase]
===============:=:===========:=:=:=:=:=:=:=:===:===:===============:===:=:=:=
STOP(a)
PEMgry(a)
[the emptyinterior of the vase]
S VERT(a)
[the available vertical surface of the vase]
i
[the materially occupiedspace of the vase]
!i
~ !;
PMAT(a)
(
P VERT-EXT-AVAIL
a ) [the available neighborhoodextending
horizontally to the vase]
==================================================================
~
======================================================
::::::::::::::::::::::::
figure 1
28
Accordingto (32a) the preposition "auf’ expressesthat the
surface of the LOis in contactwith the top surface of the
RO(cf. ex.3, 6). Thetopological propertyof connectedness
can be used to describe the contact relation betweentwo
surfaces. Herethe notation "©"expressesthat the unionof
the particular surfaces is connected.(32a) is the default
readingof "auf’. It presupposesthe existenceof a vertical
direction andof gravity. Hence,the functional relation of
support could easily be derived from the given spatial
configuration.The(32b)clause says that the intersection
the materialinterior of the objects involvedis containedin
the top surface of the RO.This abstraction shouldcapture
the "embedding"
of the LOin the top surface of the RO(cf.
ex.4). (32c) describes the homogeneous
contact of
surface of the LOwith the vertical surface of the RO.The
use of "auf’for the referenceto a verticalsurfaceis restricted
to thin surface-likeobjectsor liquid andgranularsubstances
in the role of the LOand to ROswhichprovide a salient
vertical surface(cf. ex.5). Finally, (32d) showsthat "auf"
can also be used to highlight the emptyinterior of its
referenceobject. Againthis use is restricted to a coupleof
objects andcannotbe predicted(cf. die Lampe
auf demFlur
(’the lampin (on)the hall’)).
Nowlet us look at the spatial meaningof the preposition
"an"(’on’,’nextto’) in (33):
(33) a ANb ¢:~ (a) S(a) © SVERT(b)
0a) (P(a) n P(b))
(c) if "b" is a strictly bounded
object:
(’on’) has a widerwading:
(35) aNAb ¢:,
(a) S(a) ©
(b) (P(a) c~ P(b))
(c) if "b" is idiosyncraticallyusedwith"na":
P(a) c PEMI’TY
(b)
As shownin (35a) "na" expresses the contact of the LO’s
surfacewithanysurfaceof its RO(cf. ex. 3’, 5’, 6’, 7’). The
(35b) clause says that a part of the LOis embedded
in the
RO’ssurface(cf. ex.4’, 8’). Thethird meaning
(35c)captured
by "na" is its referenceto an emptyinterior, whichis valid
onlyfor lexicallymarked
objects(cf. ex.10’-13’).
Finally, representation(36) indicates that the Russianpreposition "u" (’nextto’) is usedto situate an objectin the available neighborhoodof the ROwhichextends horizontally to
it (of. ex.9’).
(38) a U b ¢:, P(a) c PVERT-EXT-AVAIL(b)
4.The correspondences between
source and target language
representations
Nowlet us apply the introducedmeaningrepresentations for
spatial prepositions to the domainof machinetranslation.
Assuming
that the given complexmeaningrepresentations
are presentin the SLlexicon,it is the task of the analysisto
find out whichof the possibleinterpretationsis appropriate.
Thequestion arises whetherit is alwaysnecessaryto disambiguate
the givenrepresentations.If welook at the transP(a) c PVERT.EXT.AVAIL(b)
lation picturein sectionone, it turns out that the translation
In (33a)"an" capturesthe contactof a surfaceof the LOwith mappingcan be guided by TLrequirements. In the case
the vertical surfaceof the RO(cf. ex. 5, 7). Representation wherethe SLrepresentation is Completelyshared by a TL
(33b) denotes that the LOis an appendageof the ROwhich preposition(I. equivalence)the mappingis straightforward.
is embedded
in its surface (cf. ex.8). This representation If the meaningof the SLpreposition is a submeaning
of a
overlaps with (32b). In the generation process (33b)
TLpreposition (II.a generalization) then the moregeneral
assumedto be the default interpretation, if wecan exclude TLrepresentationis the appropriateone. If the TLmakesa
the embedding
in a top surface denotedby (32b), since the
distinction not madein the SL (II.b specification),
morespecific representationis givenpreference.Under(33c) analysis is indispensable, and mustgo as deepas the TL
"an" saysthat the LOis situated in the availableexterior of
specification. If the use of the TLpreposition is idiosynthe RO,whichextendshorizontallyto it. It is valid only if
cratic (II.c idiosyncrasy)thenthe mapping
is justified if the
the ROis a strictly bounded
object(cf. ex.9).
corresponding
ROis appropriatelymarkedin the lexicon.
NowI turn to someRussianlocative prepositions.
In order to find out the correspondence
betweensourceand
First, the meaningof "v" (’in) is representedin (34).
target languagerepresentationseachdisjunct of the givenSL
captures exactly the sameset of interpretations as the
representation is comparedwith TLrepresentations in the
German
preposition"in" does,(cf. ex. 1’- 2’).
TL lexicon. Wehave to find those from which the
(34) a V b ¢:~ (a) P(a) c PEMPTy(b)
appropriate TL preposition can be derived. These are TL
(b) P(a) c PMAT
representations whichare identical with one of the given
As wecan see in (35) the Russianlocative preposition"na"
SLrepresentationsor whichshare partially at least one of
29
those. Here knowledgeabout the sets of spatial points
described in the prepositions’ meaningrepresentations is
used to infer (i) whichare the corresponding
TLrepresentations and (ii) whichrelation holds betweenthe SLand
representations. This relation points out the kind of
translation mismatch.Consequently,it suggests the appropriate mappinglevel. Moreprecisely, if the set of spatial
points of the ROexpressedin the TLrepresentation is a
superset of the oneexpressedin the SLrepresentation, and
the remaining parts of the SL and TLpropositions are
identical, then weare facedwith a generalizationin the TL.
Here the translation mappingis allowed since the SL
representationlogically impliesthe TLrepresentation.If the
set of spatial pointsthe ROin the TLrefers to is a subsetof
the set the ROin the SLrefers to, then a specificationin the
TL is recognized.If there is morethan one such TLrepresentation fromwhichdifferent prepositionscan be derived,
no mapping
can be carried out. Ananalysis accordingto the
TLspecificationis then indispensable.
Hence,the correspondencesbetweenSLand TLrepresentations are inferredonthe basis of identity, supersetandsubset
relations betweenthe sets of spatial points describedin the
prepositions’meaning
representations.Let meillustrate this
with some examples. Wewant to translate the German
preposition"auf"into Russian.It is replacedby the expressions (32a-d):
(32a) S(a) © STOP@)
(32b) (P(a) c~ P(b)) c
(32c)if "a" is a thin surface-likeobject:
S(a) @Svm~T(b)
(32d)if "b"is usedidiosyncraticallywith"auP’:
P(a) c PF_.MPTY
CO)
Herethe followingTLrepresentationsare pickedout as the
correspondingones:
(35a) S(a) ©
(35b)(P(a) c~ P(b))
(35c)if "b" is usedidiosyncraticallywith"na":
P(a) c PE~zrY(b)
(34a) P(a) c PFa~rY
Theserepresentationsare foundin the followingway.
Given(28) STOp(a)~ S(a) it can be inferred that (32a)
submeaning
of (35a), and (32b) is a submeaning
of (35b).
it turns out that the GermanLOfulfills the condition on
meaning(32c), then accordingto (29) S V~T(a)c S(a)
is a submeaningof (35a). Moreover,if the GermanRO
usedwith the preposition"auf" to refer to an emptyinterior
(32d), then (35c) and(34a) are the corresponding
representa-
30
tions becauseof the identity relation. Here the lexical
informationon the RussianROis decisive for the choice
between
"v" (’in’) or "na"(’on’) in the TL.If oneof the
mainingrepresentations(32a-c) is valid the mapping
is also
straightforward,becausethe set to whichthe target language
ROrefers is a superset of that to whichthe ROin the SL
refers. Thesupersetrelation suggestsa generalizationin the
TL, i.e., an analysis is not necessary. Consequently,the
mappingto the more general representations (35a,b)
allowedand the Russianpreposition"na" is generated.
Nowlet us considera morecomplicated
case, the translation
of the Russian preposition "na"(’on’), which has the
followingmeaning:
(35a) S(a) ©
(35b)(P(a) c~ P(b))
(35c)if "b" is idiosyncraticallyusedwith "na":
P(a) c PF~irry(b)
In this case a lot of corresponding
representations
are found:
(32a) S(a) © STop(b)
(32b)(P(a) c~ P(b)) c
(32c)if "a" is a thin surface-likeobject:
S(a) © SVERT(b)
(32d)if "b" is usedidiosyncraticallywith "auf’
P(a) c PFaVlPTY
(b)
(33a) S(a) SVERT(b)
(33b) (P(a) n P(b))
(31a) P(a) c PEMPTY(b)
TheseTLrepresentations are picked out in the following
way.Onthe one hand(35a) includes (32a) and(35b) includes
(32b) since (28) S(a) ~ STOp(a).Onthe other hand,
(29) S(a) ~ SV~T(a),it can be inferred that (32c) and
are containedin (35a). (35b)and(33b)are identical.
case of appropriatelexical informationon the RussianRO,
(35c) is identical with (31a) and with (32d) if the
ROis also usedidiosyncratically.
Here the mappingis allowedonly if the RussianROmakes
an idiosyncratic use of the preposition "na" (35c). In this
case noother SLinterpretationis valid since the idiosyncratic use is alwaysgiven preference.Becauseof the identity
relation the mappingcan be processed. Comparingthe
remainingSLand TLrepresentations a specification in the
TLcan be inferred becausethe sets to whichthe target
languageROsrefer are subsets of that to whichthe ROsin
the SL refers. Fromthe found TL interpretations two
different prepositions, namely"auff and "an", can be generated, i.e., the translation mapping
cannotbe processed.
Theanalysis has to showwhichof the TLrepresentationsis
the appropriate one in the given situation. This is done
using knowledge
about the spatial properties of the ROand
the functionalrelations betweenthe twoobjects involved.
5. The translation
model
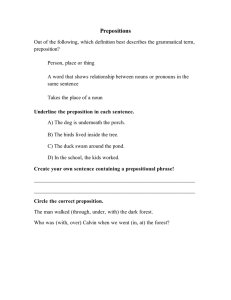
Howcan these ideas be realized in a MTmodel?Following
basically the ideas of the "Translation-by-NegotiationApproach"proposed by [KAY1991], a translation model
whichmakesuse of the introducedmeaningrepresentations
andthe inference guidedmappingbetweenthemis represented diagrammatically
in figure 2.
Ignoringthe syntactic analysis, first the preposition is
replacedby the disjunctionof all its possiblemeanings.On
this level no analysis is carried out to find the appropriate
one amongthe possible SL interpretations. The whole
bundleof possible meaningsis sent to the negotiator. The
latter finds all representationsin the TLlexiconfromwhich
a corresponding
prepositioncan be derived.If only identical
representationsare foundor if all corresponding
TLrepresentations havea moregeneral meaning,then the mappingis
straightforward(MI). In the case of an idiosyncraticuse
the SLor TLpreposition the mappingis determinedby the
lexical informationof the corresponding
RO.If the negotiator finds only morespecific TLrepresentations, fromwhich
different prepositionsare generated,the analysis mustgo as
deepas the TLspecificationrequires. If oneof themis found
the mapping(M2)is carried out. Then, the TLpreposition
is generatedfromthe appropriateTLrepresentation.
I TranslationModelfor LocativePrepositions
]
analysisdrivenby the specifi- [
I
cationof TLrepresentation
generalizati°n
identity
specification
I
~r
checking language-specific I
checkinglanguage-specific
features of SLobjects
t
features of TLobjects
I negotiator
I
/r- findingout the relation between
\ ~ | SL & TL representations
~v] . pointers to the appropriate
x~k,_ mapping levels
r
replacementof the preposition
generationof TLpreposition
by the disjunctionof all
frommeaningrepresentation
possibleinterpretations
I
t
TL expression ]
~ss
to the lexicon~~
figure 2
31
6. The lexicon
The defined spatial regions (see section 2) allow one
describe andto classify spatial objects. Theontologyfound
here reflects aboveall the topologicalpropertiesof objects,
whichare relevant for the locative prepositionsconsideredin
this investigation.
Withoutgoinginto detail I wantto give someof the classificational criteria usedin the ontologyof three-dimensional
objects. Oneof themis the distinction basedon the compo-
lexicon. A lexicon applicable to a MTmodel is shown
in figure3.
Underthe condition that a nounin both languagesdenotes
the sameobjectin the world,an identicalspatial referent can
be assumed.
In this case the spatial featurescan be sharedby
SL and TL objects in a commonpart of the lexicon.
Languagespecific information, such as the meaningof the
locative prepositionsandthe idiosyncratic use of prepositions are storedseparately.
Lexicon
SL-Lexicon
TL-Lexicon
¯ meaningrepresentationsof locative
SLprepositions
¯ meaning
representationsof locative
TLprepositions
¯ SLobjects
objectivespatial
features
,,,,,,..,,,.o
,,,.,,,,,,..
.,,.oo,.,,,,
markingof idiosyncratic
use andother languagespecificrestrictions
P(a)
~ ,t,
¯ TLobjects
°°°°°°..°.,
*°°°°°°+,+
...o..°.°.
markingof idiosyncratic
use andother languagespecificrestrictions
S(a)=...
P~r(a).. .
..,,..
figure3
sition of the space the object occupies(for definition see
7. Conclusion
(18) - (20)). If it consists of materially occupiedpoints
In this paper meaningrepresentations for Germanand
only, then either a non-hollowmassiveobject, as e.g., a
Russianspatial prepositions havebeenproposed.Considerbrick or a lake, or a substance,as e.g., water or wood,is
ing the translation phenomena
of identity, generalization,
concerned. If an object consists of exclusively nonspecificationand idiosyncrasy,it wasshownthat the undermateriallyoccupiedpoints, then it refers to a hollowspace,
lying formal representation languagemakesit possible to
as e.g., a caveor a ditch. If an objecttakes up materiallyas
find out the actual relation betweenSLand TLrepresentawell as non-materiallyoccupiedspatial points, then it is
tions and to determinethe appropriatemappinglevel. This
either a hollowbody,as for example,a cupor a bus, or a
waythe mapping
is carried out at a level as shallowas possigroup of objects, as e.g., a forest or a town, wherethe
ble andthe depthof analysis is restricted to the necessary
hollowspace is created by the spacebetweenthe particular
amount.
membersof the group. Moreover,whether hollow bodies
Hence,if an appropriaterepresentationlanguageis usedit is
andhollowspacesare closedor openis decisive.Otherclassi- possible to mediatebetweennon-identicalmeaning
represenficationalcriteria concernthe availablesurfaceof the object, tations so that wecan get by with a monolingual
description
its boundedness,its canonical position accordingto the
maintaining the language-independenceassumption. This
earth’s surfaceandits typical neighborhood.
waythe difficulties of findingan abstract representationof
Theontologyallowsthe description of topological properthought, whichis sharedby the languagesinvolved, can be
ties of objects as properties of a wholeclass. This makes avoided.
possible an efficient spatial description of objects in the
32
8. Bibliography
[KAY1991]
[AURNAGUE/VIEU
1992]
M. Kay, J. M. Gawron, P. Norvig: Verbmobil: A
M. Aurnague,L.Vieu:A tree-level approachto the seman- Translation Systemfor Face-to-FaceDialog. Manuscript,
tics of space. In: C. Zelinsky-Wibbelt(ed.):
Thesemantics
StanfordUniversity,1991.
prepositions: from mental processing to NLprocessing.
[KAMEJAMA
1991]
Mouton
de Gruynter, Berlin, 1992.
M. Kameyama,
R. Ochitani, S. Peters: Resolving Trans[BARNETr1991]
lation MismatchesWithInformation Flow. In Proceedings
J. Barnett, I. Mani,E. Rich, C. Aone,K. Knightand J.C.
of the 29th AnnualMeetingof the ACL,p. 193-200, UC
Martinez: CapturingLanguage-SpecificSemanticDistincBerkeley,1991.
tions in Interlingua-Based MT.In: MachineTranslation
[LAKOFF1987]
SummitIII: Proceedings,p. 25-32, WashingtonD.C., July
G. Lakoff: Women,Fire and Dangerous Things: What
1991.
Categories Reveal about the Mind. University of Chicago
[BIERWISCH
1988] M. Bierwisch: On the grammerof
Press, Chicago,1987.
local prepositions. In:Bierwisch, W.Motsch,I. Zimmer- [LANG1987]
mann(eds.): Syntax, Semantikund Lexikon,studia gramma- E. Lang: Semantikder Dimensionsauszeichung
r~umlicher
tica 29, p.1-65, Akademie-Verlag,
Berlin, 1988.
Objekte. In: M. Bierwisch, E. Lang(eds.): Grammatische
[BUSCHBECK-WOLF
1993]
und konzeptuelleAspektevon Dimensionsadjektiven.
studia
B. Buschbeck-Wolf:Meaningrepresentations for spatial
grammaticaXXVI+ XXVII,p. 287-459, Akademie-Verlag,
prepositions. To appear in: Arbeitsberichte des SFB340 Berlin, 1987.
"Sprachtheoretische
Grundlagen
f’tir die Computerlinguistik", [LUTZEIER
1974]
Nr. 30, Stuttgart, 1993.
P. R. Lutzeier: Der "Aspekt"Welt als Einstieg zu einem
[CIENKI1989]
ntitzlichen Kontextbegriff
fur eine natfirliche Sprache.DisserA. J. Cienki: Spatial Cognitionand the Semanticsof Prepo- tation. Stuttgart.
sitions. SlavistischeBeitr,’lge, Bd. 237.Mtinchen,
1989.
[MOILANEN
1979]
[CLARKE
1981]
M. Moilanen:Statische lokative Pr/tpositionen im heutigen
B. L. Clarke: A Calculus of Individuals Basedon Connec- Deutsch. Wahrheits-und Gebrauchsbedingungen.
Niemeyer,
tion. In: NotreDameJournal of FormalLogic, vol. 2, No. Ttibingen, 1979.
3., 1981.
[PRIBBENOW
1992]
[HERRLICH
1986]
S. Pribbenow:Zur Verarbeitung von LokalisierungsausH. Herrlich: TopologieI: TopologischeR~tume.Berliner
driicken in einemhybriden System. IWBS-Report
211, IBM
Studienreihezur Mathematik
2., Berlin, 1986.
Stuttgart, 1992.
[HERSKOVITS
1986]
[SEDIN1963]
A. Herskovits"Languageand Spatial Cognition.AnInterV. N.Sedin: Predlogi nemeckogojazyka. Russkij Jazyk,
disciplinary Studyof the Prepositions in English. Cam- Moskva,1963.
bridge UniversityPress, Cambridge,
1986.
[VANDELOISE
1986] C.Vandeloise: L’ espace en fran~ais.
[HERWEG
1988]
S6mantique
des pr6positionsspatiales. Paris, 1986.
M. Herweg:Zur Semantikeiniger lokaler Pr/tpositionendes
[VSEVOLODOVA
1982]
Deutschen. Oberlegungenzur Theorie der lexikalischen
M. V. Vsevolodova,J.J. Vladimirskij: SposobyvyrazCenija
SemantikamBeispiel yon"in", "an", "bei" und"auf". Lilog- prostranstvennych otno~’enij v sovremennomrusskom
Report21, IBMStuttgart, 1988.
jazyke. Russkij jazyk, Moskwa,
1982.
[JAPKOWICZ/WIEBE
1991]
[ZELINSKY-WIBBELT
1990]
N. Japkowicz, J. N. Wiebe: A System for Translation
C. Zelinsky-Wibbelt:
Thesemanticrepresentationof spatial
Locative Prepositions from English into French. Procee- configurations: a conceptualmotivationfor generation in
dings of the 29th AnnualMeetingof the ACL,p.153-160, MachineTranslation. Proceedingsof COLING
1990, p. 299UCBerkeley, 1991.
303, Helsinki. 1990.
33