The Value of Consensus in Online Stochastic Scheduling Russell Bent
advertisement

From: ICAPS-04 Proceedings. Copyright © 2004, AAAI (www.aaai.org). All rights reserved.
The Value of Consensus in Online Stochastic Scheduling
Russell Bent and Pascal Van Hentenryck
Brown University
Providence, RI 02912
{rbent,pvh}@cs.brown.edu
Abstract
This paper reconsiders online packet scheduling in computer
networks, where the goal is to minimize weighted packet loss
and where the arrival distributions of packets, or approximations thereof, are available for sampling. Earlier work
proposed an expectation approach, which chooses the next
packet to schedule by approximating the expected loss of
each decision over a set of scenarios. The expectation approach was shown to significantly outperform traditional approaches ignoring stochastic information.
This paper proposes a novel stochastic approach for online
packet scheduling, whose key idea is to select the next packet
as the one which is scheduled first most often in the optimal
solutions of the scenarios. This consensus approach is shown
to outperform the expectation approach significantly whenever time constraints and the problem features limit the number of scenarios that can be solved before making a decision.
More importantly perhaps, the paper shows that the consensus and expectation approaches can be integrated to combine
the benefits of both approaches.
These novel online stochastic optimization algorithms are
generic and problem-independent, they apply to other online
applications as well, and they shed new light on why existing
online stochastic algorithms behave well.
Introduction
Online packet scheduling is a class of important problems
arising in communication networks. These problems may
significantly vary in scope and difficulty but they are often
challenging since they may require online solutions to complex combinatorial optimization problems. This paper reconsiders the online packet scheduling model from (Chang,
Givan, & Chong 2000) where jobs from different classes
arrive stochastically and must be scheduled within a fixed
amount of time or dropped. Each job has a weight and the
goal is to minimize the weighted packet loss or, alternatively,
to maximize the sum of the weights of the scheduled packets. The arrival distributions of the packets, which are quite
complex in our experiments, are available for sampling.
The offline version of this packet scheduling problem is
relatively simple and can be solved in polynomial time.
However, it is sufficiently rich to demonstrate and study the
c 2004, American Association for Artificial IntelliCopyright gence (www.aaai.org). All rights reserved.
practical issues arising in online optimization. Indeed, the
main purpose of (Chang, Givan, & Chong 2000) in studying this problem was to demonstrate that exploiting stochastic information may provide significant benefits in online
packet scheduling. They proposed an expectation approach
which chooses the next packet to schedule by approximating
the expected loss of each packet class over the distribution.
The approximation samples the distributions to build scenarios from available and future packets. The expectation algorithm was shown to significantly outperform traditional approaches which ignore stochastic information such as greedy
heuristics and algorithms optimizing the decisions based on
known packets. However, the expectation algorithm may be
quite demanding computationally, since it solves each scenario for each class of packets. As a consequence, it may
not scale well when the number of classes increases and it
may not be applicable when decisions must be taken within
strong time constraints.
This paper reconsiders online packet scheduling and proposes a consensus approach which was inspired by our earlier work on online vehicle routing where decisions must
be taken quickly and the optimization algorithms are timeconsuming (Bent & Van Hentenryck 2001; 2003). At each
time t, the key idea underlying the consensus approach is
to solve each scenario once and to select the packet which
is scheduled first the most often in the optimal solutions of
the scenarios. This consensus algorithm outperforms the
expectation approach significantly when time limits restrict
the number of scenarios which can be solved before making the decision. Indeed, in the consensus approach, solving
a scenario produces global information on all possible actions, not on a single action as in the expectation approach.
Moreover, the paper demonstrates that the consensus and expectation approaches can be hybridized to preserve most of
their respective advantages. In particular, the hybridization
provides the quality of the expectation algorithm when the
number of available scenario optimizations is large and most
of the quality of the consensus approach when there is only
time to solve a few scenarios. The key contributions of this
paper can thus be summarized as follows:
1. it proposes a consensus approach for a class of online
stochastic optimization algorithms, which (1) reduces the
computational burden of the expectation method and (2)
should significantly outperform it when time constraints
ICAPS 2004
219
limit the number of scenarios that can be solved in between two events;
2. it applies the algorithm to online packet scheduling and
demonstrates the significant improvement in quality under strict time constraints.
3. it proposes an hybrid algorithm which almost always outperforms the expectation and consensus approaches and
combines their benefits;
4. it provides experimental justification for the consensus
approach in online vehicle routing since these applications can only solve 2-10 scenarios in between events.
5. it provides experimental evidence that consensus approaches quickly converge to their optimal solution values
in terms of the number of scenarios.
The rest of the paper is organized as follows. It first formulates online packet scheduling precisely as a scheduling problem and describes the online stochastic optimization framework. The next section discusses the relationships to Partially Observable Markov Decision Processes
(POMDPs), since the packet scheduling problem was initially modelled as a POMDP. The paper then describes the
polynomial time offline algorithm, the oblivious online algorithms, and the online stochastic approaches. It reports
the experimental results, describes related work, and give
the conclusion and future directions.
ONLINE O PTIMIZATION(H)
1
2
3
4
5
6
7
8
J ← ∅;
w ← 0;
for t ∈ H
do J ← AVAILABLE R EQUESTS(J, t) ∪ NEW R EQUESTS(t);
j ← CHOOSE R EQUEST(J, t);
SERVE R EQUEST(j, t);
w ← w + w(j);
J ← J \ {j};
Figure 1: The Generic Online Algorithm
The goal is to find a feasible schedule σ maximizing w(σ).
In the online version, jobs are not known a priori but new
jobs arrive at each time step, at most one per class. As in
(Chang, Givan, & Chong 2000), we assume that the arrival
distribution of the jobs, or an approximation thereof, can be
sampled. In other words, we assume the existence of a black
box which can be queried to return samples of future job requests. Once again, the goal is to find a schedule of maximal
weight. Observe that, although classes are not significant in
the offline version of the problem, they are used to reduce
the complexity of the expectation algorithm. Note also that,
in (Chang, Givan, & Chong 2000), the arrival distribution of
jobs of a given class is governed by an independent Hidden
Markov Model (HMM).
Problem Description
Online Stochastic Optimization
The online packet scheduling problem was initially proposed by (Chang, Givan, & Chong 2000) to study the benefits of stochastic information on the quality of the schedules. Its offline version can be specified as follows. We are
given a set Jobs of jobs partitioned into a set of classes C.
Each job j is chararacterized by its weight w(j), its arrival
date a(j), and its class c(j). Jobs in the same class have the
same weight (but different arrival times). We are also given
a schedule horizon H = [H, H] during which jobs must be
scheduled. Each job j requires a single time unit to process
and must be scheduled in its time window [a(j), a(j) + d],
where d is the same constant for all jobs (i.e., d represents
the time a job remains available to schedule). In addition,
no two jobs can be scheduled at the same time and jobs that
cannot be served in their time windows are dropped. The
goal is to find a schedule of maximal weight, i.e., a schedule
which maximizes the sum of the weights of all scheduled
jobs. This is equivalent to minimizing weighted packet loss.
More formally, assume, for simplicity and without loss of
generality, that there is a job scheduled at each time step of
the schedule horizon. Under this assumption, a schedule is
a function σ : H → Jobs which assigns a job to each time
in the schedule horizon. A schedule σ is feasible if
As mentioned earlier, our goal is to design and evaluate various approaches to online stochastic optimization. In particular, the main focus of this paper is on determining how to use
sampling in order to improve the quality of the online solutions under various time constraints. Hence the techniques
considered in this paper apply to a variety of online stochastic optimization problems and are not tailored to the packet
scheduling problem. They only rely of the existence of an
algorithm to solve (or approximate) the offline problem and
on the ability to sample the distribution. More precisely, the
approaches presented herein are expressed in terms of the
two black boxes:
1. a function OPTIMAL S CHEDULE(J, H) which, given a set
J of jobs and a schedule horizon H, returns an optimal
schedule of J over H;
2. a function GET S AMPLE(H) which, given a schedule horizon H, returns a set of jobs to be scheduled over H by
sampling the arrival distribution.
When facing another online stochastic optimization problems, it suffices to replace, or implement, these two functions for the application at hand.
Moreover, all the approaches described in this paper
shares the same overall structure which is depicted in Figure 1 and expressed in general terms to emphasize its independence from the packet scheduling problem. The approaches only differ in the way they implement function
CHOOSE R EQUEST . The online optimization schema simply considers the set of available and new requests at each
time step and chooses a request j which is then served and
∀ t1 , t2 ∈ H : t1 6= t2 → σ(t1 ) 6= σ(t2 )
∀ t ∈ H : a(σ(t)) ≤ t ≤ a(σ(t)) + d.
The weight of a schedule σ, denoted by w(σ), is given by
X
w(σ) =
w(σ(t)).
t∈H
220
ICAPS 2004
removed from the set of available requests. In the case of
packet scheduling, J denotes the set of jobs to schedule,
function AVAILABLE R EQUEST(J, t) returns the set of jobs
that are available at time t, i.e.,
AVAILABLE R EQUEST (J, t) = {j ∈ J | t ≤ a(j) + d}
and function SERVE R EQUEST(j, t) simply schedules j at
time t (σ(t) ← j). Subsequent sections specify the offline algorithms, i.e., their implementations of function
CHOOSE R EQUEST . However, we first relate this framework
to POMDPs.
Relationships to POMDPs
POMDPs have been used to represent and solve a broad
class of problems with inherent uncertainty and the packet
scheduling problem was initially modeled as a POMDP
by (Chang, Givan, & Chong 2000). It is thus appropriate to relate this work to this line of research. There is
a wide variety of approaches to solve or approximate general POMDPs in the expected sense. Of particular relevance to this work is the sampling method of (McAllester
& Singh 1999) (see also (Kearns, Mansour, & Ng 1999a;
1999b)). This approach computes an expectimax function on the POMDP. In other words, it determines the action/policy that achieves the best reward in the expected
sense. Informally speaking, computing this function involves a randomized tree exploration: the method tries an
action, samples the distribution to find a next state, tries another action, and repeats. Of course, to evaluate the best
possible expected benefit of an action a at a node, all possible subsequent actions must be tried. The best of these
subsequent actions determines the best possible benefit of a.
An important theoretical result of expectimax sampling
is that the actual expected value of an action can be formally approximated given enough samples and a sufficient
depth. However, the resulting algorithm is exponential wrt
the number of actions and the depth. Indeed, as pointed out
by (Chang, Givan, & Chong 2000), when a guaranteed approximation is desired, the method is intractable for many
problems, including the packet scheduling problem, even
when dynamic programming and other techniques are used
to reduce computation. When the parameters are chosen to
ensure tractability, the algorithm is no longer competitive.
However, (Chang, Givan, & Chong 2000) observed that the
randomness in the POMDP is independent of the actions
taken. The expectimax tree can then be collapsed to a single level, where each action is evaluated against a number of
scenarios obtained through sampling. Algorithm E, which is
presented later in the paper, was proposed in (Chang, Givan,
& Chong 2000) as a general algorithm for POMDPs with
this property and applied to the packet scheduling problem
to show the value of stochastic information. The new algorithms presented herein would apply to the same class of
POMDPs and may be of interest to other classes of POMDPs
as well.
Offline Scheduling Algorithm
An interesting aspect of the offline scheduling problem is
that it is solvable in polynomial time (Chang, Givan, &
Chong 2000). The quadratic algorithm is loosely based upon
earlier work in (Villareal & Bulfin 1983). Although a detailed understanding of the algorithm is not necessary for the
rest of the paper, Figure 2 gives the pseudo-code for the optimal algorithm for completeness. The algorithm builds the
optimal schedule σ from right to left by considering each
job successively, starting with the job of highest weight and,
in case of ties, of latest arrival date (line 2). For each job j,
the algorithm finds the right-most time t before the deadline
a(j) + d where j can be scheduled (line 3). If such time
t exists, there are two possibilities. If t ≥ a(j), then the
algorithm simply schedules j at time t (line 6). Otherwise,
the algorithms tries to shuffle the schedule to accommodate
j after its arrival date by shifting existing jobs left (line 7).
The shuffling successively swaps job j (initially scheduled
at time t) with jobs on its right until j is scheduled after a(j)
or no such swap is feasible. Once a schedule is built, the
algorithm applies a postprocessing step to make sure that
jobs with highest weights and, in case of ties, earliest arrival dates, are scheduled as early as possible (line 8). This
postprocessing step is slightly more specific than in (Chang,
Givan, & Chong 2000) to ensure that the offline schedule is
most appropriate for an online use. Note that, in Figure 2,
we use σ(t) = ⊥ to denote that no job is scheduled at time t
at this stage. Moreover, FEASIBLE S WAP (σ, t1 , t2 ) holds if
a(j1 ) ≤ t2 ≤ a(j1 ) + d ∧ a(j2 ) ≤ t1 ≤ a(j2 ) + d.
where j1 = σ(t1 ) and j2 = σ(t2 ). We also use min S (resp.
max S) to denote the minimum (resp. maximum) of a set
S. By convention, if S is empty, both expressions return ⊥.
Online Oblivious Algorithms
This section describes two existing online algorithms which
are not using stochastic information.
Greedy (G): This heuristic schedules the job with highest
weight and, in case of ties, the job with the earliest deadline.
(Chang, Givan, & Chong 2000) refers to this heuristic as
SP. It can be specified formally as
CHOOSE R EQUEST-G(J, t)
1 σ ← OPTIMAL S CHEDULE(J, [t, t]);
2 return σ(t);
Local Optimal (LO): This algorithm chooses the next
job to schedule at time t by finding the optimal solution for
the available jobs at t. The first job in the optimal solution
is selected. (Chang, Givan, & Chong 2000) refers to this
algorithm as CM. It can be specified formally as
CHOOSE R EQUEST-LO(J, t)
1 σ ← OPTIMAL S CHEDULE(J, [t, t + d]);
2 return σ(t);
Note that the optimal schedule cannot expand beyond time
t + d by definition of the time windows.
ICAPS 2004
221
OPTIMAL S CHEDULE(Jobs, H)
1
2
3
4
5
6
7
8
9
σ(t) ← ⊥ (t ∈ H);
for j ∈ Jobs ordered by decreasing hw(j), a(j)i
do p ← max{t ∈ H | t ≤ a(j) + d & σ(t) = ⊥};
if p 6= ⊥
then if p ≥ a(j)
then σ(p) ← j;
else σ ← SHUFFLE(σ, j, p);
POSTPROCESS(σ, Jobs, H);
return σ;
SHUFFLE(σ, j, p)
1
2
3
4
5
6
7
8
9
σ 0 ← σ;
σ(p) ← j;
while p < a(j)
do q ← min{t | p + 1 ≤ t ≤ p + d & a(σ(t)) ≤ p};
if q 6= ⊥
then SWAP(σ, p, q);
p ← q;
else return σ 0 ;
return σ;
POSTPROCESS(σ, H)
1
2
3
4
for p ∈ H, q ∈ H : p < q
do if FEASIBLE S WAP(σ, p, q) &
hw(σ(p)), a(σ(p))i < hw(σ(q)), a(σ(q))i
then SWAP(σ, p, q);
Figure 2: The Optimal Packet Scheduling Algorithm
Online Stochastic Algorithms
We now consider a variety of online approaches using
stochastic information to make more informed decisions.
We assume that each approach has the time to execute the
offline algorithm nbOpt times for samples which extend ∆
time steps in the future. Both nbOpt and ∆ are parameters
of the online stochastic algorithms. Note that function OPTI MAL S CHEDULE is quadratic in the schedule horizon in the
worst case.
Expectation (E): This is the primary method proposed
by (Chang, Givan, & Chong 2000). It is referred to as SPM
in that paper. Informally speaking, the method generates
future jobs by sampling and evaluates each possible selection against that sample. A naive implementation can be
specified as follows:
CHOOSE R EQUEST-NE(J, t)
1
2
3
4
5
6
7
8
9
for j ∈ J
do f (j) ← 0;
for i ← 1 . . . nbOpt/|J|
do R ← J ∪ GET S AMPLE([t + 1, t + ∆]);
T ← [t + 1, t + 1 + ∆ + d];
for j ∈ J
do σ ← OPTIMAL S CHEDULE(R \ {j}, T );
f (j) ← f (j) + w(j) + w(σ);
return argmax(j ∈ J) f (j);
Lines 1-2 initialize the evaluation function f (j) for each
job j. The algorithm then generates a number of samples for
222
ICAPS 2004
future requests (lines 3-4). For each such sample, it computes the set R of all available and sampled jobs at time
t (line 4) and an appropriate time horizon for the scenarios (line 5) The algorithm then considers each available job
j successively, it implicitly schedules j at time t, and applies the optimal offline algorithm (line 7) using R \ {j}
and the time horizon. The evaluation of job j is updated in
line 8 by incrementing it with its weight and the score of the
corresponding optimal offline schedule σ. All scenarios are
evaluated for all jobs and the algorithm then returns the job
j ∈ J with the highest evaluation.
The above implementation is very ineffective when
applied to the packet scheduling problem. Indeed, the
algorithm can be considerably improved by considering
only one job per class (i.e., the one with the earliest arrival
date), since other choices are guaranteed not to produce
better schedules. The jobs are called the representative jobs
in the following. The representative job with the highest
evaluation is then chosen. This reduces the number of
iterations of the inner loop from |J| to C, which is typically
much smaller. The implementation of E can be specified as
follows:
CHOOSE R EQUEST-E(J, t)
1
2
3
4
5
6
7
8
9
10
11
for c ∈ C
do j(c) ← argmin(j ∈ J : c(j) = c) a(j);
f (j(c)) ← 0;
for i ← 1 . . . nbOpt/|C|
do R ← J ∪ GET S AMPLE([t + 1, t + ∆]);
T ← [t + 1, t + 1 + ∆ + d];
for c ∈ C
do σ ← OPTIMAL S CHEDULE(R \ {j(c)}, T );
f (j(c)) ← f (j(c)) + w(j(c)) + w(σ);
c∗ = argmax(c ∈ C) f (j(c));
return j(c∗ );
Lines 1-3 initializes the representative jobs j(c) for each
class c and their evaluations f (j(c)). The algorithm then
proceeds as before but only considers representative jobs. 1
Algorithm E partitions the number of available optimizations among the various job classes. As a consequence, every class of jobs is evaluated against nbOpt/|C| scenarios.
This is a significant drawback when time is limited (nbOpt
is small) and/or when the number of requests is large. This
is precisely why online vehicle routing algorithms (Bent &
Van Hentenryck 2001; 2003) do not use this method, since
the number of requests is very large (about 50 to 100), time
between decisions is limited, and the optimization algorithm
is demanding computationally.
Consensus (C): We now turn to a novel online algorithm.
Algorithm C uses stochastic information in a fundamentally different way and can be viewed as an abstraction
of the sampling method used in online vehicle routing
with stochastic customers (Bent & Van Hentenryck 2001;
1
It is possible to design an alternative sampling method that
utilizes independent samples for each request. However empirical
studies in (Chang, Givan, & Chong 2000) and by these authors on
this problem show this approach is less successful in general.
Low
Weight Rank
5
1
10
4
20
7
1
10
15
13
50
16
30
19
25
22
40
25
3
28
2003). Instead of evaluating each possible request at time
t with respect to each sample, its key idea underlying
algorithm C is to execute the optimization algorithm on the
available and sampled jobs and to count the number of times
a job is scheduled at time t in each resulting solution. The
job with the highest count is selected. The motivation behind algorithm C is the least-commitment heuristic (Stefik
1981) often used in planning and scheduling. By choosing a
job which is selected first the most often, algorithm C takes
a decision which is consistent with the optimal solutions of
many samples. Algorithm C can be specifies as follows:
Medium
Weight Rank
600
2
800
5
500
8
700
11
750
14
550
17
650
20
400
23
450
26
575
29
High
Weight Rank
1000
3
2000
6
1500
9
1200
12
3000
15
2500
18
3500
21
4000
24
5000
27
4500
30
CHOOSE R EQUEST-C(J, t)
1
2
3
4
5
6
7
for j ∈ J
do c(j) ← 0;
for i ← 1 . . . nbOpt
do R ← J ∪ GET S AMPLE([t + 1, t + ∆]);
σ ← OPTIMAL S CHEDULE(R, [t, t + ∆ + d]);
c(σ(t)) ← c(σ(t)) + 1;
return argmax(j ∈ J) c(j);
Observe line 5 which calls the offline algorithm with all
available and sampled jobs and a schedule horizon starting
at t and line 6 which increments the number of times job
σ(t) is scheduled first. Line 7 simply returns the job with
the largest count. Algorithm C has several appealling features. First, it does not partition the available optimizations
between the job classes, which is a significant advantage
when the number of available optimizations is small and/or
when the number of classes is large. Second, it avoids the
conceptual complexity of dealing with classes of jobs. The
main strength of algorithm C is to identify (quickly and implicitly) the most promising requests. Its limitation is that it
ignores the score of the schedules and may fail to discriminate between requests with similar or close consensus scores
but different weights.
Consensus+Expectation (C+Ek ): Algorithms E and C
both have advantages and limitations. Algorithm C+E k
attemps to combine their strengths while minimizing their
drawbacks. Its key idea is to run algorithm C first to identify
a small set of k promising requests and to run the naive
version of E to discriminate between them in a precise
fashion. Letting nbOpt = Sc + kSe , the algorithm can be
specified as follows:
CHOOSE R EQUEST-C+E k(J, t)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
for j ∈ J
do c(j) ← 0;
for i ← 1 . . . Sc
do R ← J ∪ GET S AMPLE([t + 1, t + ∆]);
σ ← OPTIMAL S CHEDULE(R, [t, t + ∆ + d]);
c(σ(t)) ← c(σ(t)) + 1;
P = argmax(k)(j ∈ J) c(j);
for j ∈ P
do f (j) ← 0;
for i ← 1 . . . Se
do R ← P ∪ GET S AMPLE([t + 1, t + ∆]);
T ← [t + 1, t + 1 + ∆ + d];
for j ∈ P
do σ ← OPTIMAL S CHEDULE(R \ {j}, T );
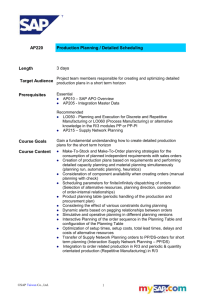
Table 1: Job Classes
15
16
f (j) ← f (j) + w(j) + w(σ);
return argmax(j ∈ P ) f (j);
Observe line 7 which collects in P the k jobs with the
largest counts. Th rest of the algorithm simply applies algorithm E on the jobs in P . Algorithm C+E k applies OPTI MAL S CHEDULE Sc + kSe = nbOpt times.
Experimental Results
This section compares the various approaches on the packet
scheduling problems. More precisely, it evaluates the effect
of various choices of parameters on the quality of the schedule. In practice, these parameters depend on the specifics of
the application (e.g., the available time to make a decision)
and the problem features (e.g., the number of classes and the
time windows).
The experimental results are based on the problems of
(Chang, Givan, & Chong 2000). In these problems, the arrival distributions are specified by independent HMMs, one
for each job class. Each HMM has three states which correspond to low, medium, and high job arrival rates. The
transitions between the states are drawn uniformly in the interval [0.9, 1.0]. In the low/medium/high arrival rate, the
probability of generating a job is drawn uniformly from the
intervals [0.0,0.01], [0.2,0.5], and [0.7, 1.0] respectively.
To create problems that are challenging enough, it is important to normalize the HMMs. First, each set of classes
(low, medium, and high) should have roughly the same number of jobs generated in the long run. Thus, each HMM
is simulated for a long period of time and the job generation probabilities of the HMMS are normalized such that
E[low] ≈ E[medium] ≈ E[high]. Furthermore, too few
and too many jobs make the problems easy, so the job generation probabilities are further normalized so that roughly
1.5 tasks arrive at each time unit.
The classes of jobs are also divided in three categories
corresponding to low, medium, and high weights. Table 1
depicts the weights of the various jobs classes are shown.
A rank number is also associated with each class to show
which weights match which classes. A problem with k
classes includes the classes with rank numbers 1..k. For example, problems with 7 classes use the classes with ranks
1..7 and weights (5, 10, 20, 600, 800, 1000, 2000). These
ICAPS 2004
223
105
3
Avg Non Zero Actions
100
2.5
O
G
LO
E
C
C+E3
90
85
2
Actions
Average Weighted Loss
95
1.5
80
75
1
70
65
0
20
40
60
80
100
120
140
160
Maximum Number of Offline Optimizations
180
200
Figure 3: Effect of the Number of Optimizations (nbOpt)
0.5
0
20
40
60
80
100
120
140
Maximum Number of Optimizations
160
180
200
Figure 5: Number of Promising Actions wrt the Number of
Optimizations (nbOpt)
45
Avg Available Actions
Avg Samples Per Action
40
35
Expectation Data
30
25
20
15
10
5
0
0
20
40
60
80
100
120
140
Maximum Number of Optimizations
160
180
200
Figure 4: Optimizations per Actions wrt the Number of Optimizations (nbOpt)
are exactly the same problems as those in (Chang, Givan,
& Chong 2000).
All experimental results are given for an online schedule consisting of 200,000 time steps. It is thus unrealistic
to sample the future for so many steps (since the algorithm
is quadratic in the time horizon). In general, the sampling
horizon ∆ (which corresponds to the depth of sampling in
the POMDP algorithms) is chosen to be 50 (which seems to
be an excellent compromise between time and quality when
d = 20). The effect of the sampling horizon is also analyzed
in detail.
Effect of the Number of Optimizations
Figure 3 compares the various approaches on the 7-class
problem from (Chang, Givan, & Chong 2000) in terms of the
number of offline optimizations. In these problems, the time
window size d is 20 and the sampling horizon ∆ is 50. Since
these problems have a small number of classes, they should
be favorable to algorithm E (e.g., when compared to vehicle
routing problems which have many more actions and which
are more demanding computationally). The results depict
the packet loss for each of the algorithms as a function of
224
ICAPS 2004
the number of optimizations (i.e., small values denote a better algorithm) as well as the average offline solution which
should be viewed as an (unachievable) lower bound. These
offline solutions are computed a posteriori (when the exact
data is available) and are obtained by applying the offline
algorithm.
The results are interesting in many ways. First, they
clearly indicate the value of stochastic information, since algorithms E, C, and C+E 3 are clearly superior to the oblivious algorithms. Second, observe that algorithm LO is dominated by the greedy heuristic. This confirms once again
that local optimization may not be a good approach to online problems, since it may lead to solutions that cannot
accommodate future requests easily (Bent & Van Hentenryck 2001; 2003). Finally, and perhaps most importantly,
the results demonstrate the value of consensus on the packet
scheduling problems. In particular, C is the best method
when only few scenarios can be solved before decision time
and C+Ek always dominates E and significantly so when
only few scenarios can be solved. It is also worth pointing
out that the consensus approach reaches its best value very
quickly. In other words, it does not need many samples to
identify the most promising packets to schedule.
Figure 4 depicts the number of average actions considered
with respect to the number of scenarios (and the number of
scenarios available per action) for algorithm E. The number
of actions may vary because E’s decisions may differ with
different number of scenarios. They indicate that there are
about 5 classes of packets to consider at each time step for all
values of nbOpt. The number of average classes to consider
is slightly lower when there are few scenarios to work with.
Figure 5 depicts the number of promising actions suggested
by Algorithm C as the number of scenarios increases, i.e.,
the number of packet classes which are scheduled first at
time t. The figure indicates that there are at most 3 classes
to consider, justifying why there is no need to go beyond
algorithm C+E3 on average on these problems.
Effect of the Sampling Horizon
Figures 6, 7, and 8 evaluates the effect of the sampling horizon ∆. They consider the 7-class problem with d = 20
1.2
G
LO
E
C
C+E2
C+E3
C+E5
160
O
G
LO
E
C
C+E3
140
1
Average Weighted Loss Increase Over Optimal
150
Average Weighted Loss
130
120
110
100
0.8
0.6
0.4
90
0.2
80
0
70
5
10
15
20
25
30
Job Classes
60
0
20
40
60
80
100
120
Sampling Horizon
140
160
180
200
Figure 9: Effect of the Number of Actions
Figure 6: Effect of Sample Horizon on the Weighted Loss
5.6
Avg Available Actions
Avg Samples Per Action
5.4
5.2
Expectation Data
5
4.8
4.6
4.4
4.2
4
3.8
3.6
0
20
40
60
80
100
120
Sampling Horizon
140
160
180
200
Figure 7: Samples per Actions wrt the Sampling Horizon
and nbOpt=20, and evaluates the effect of varying ∆. Figure 6 shows that a reasonable schedule horizon is critical for
E. For low schedule horizons, E is worse than the oblivious algorithms and it only becomes comparable to C when
∆ = 20. More generally, our results indicates that E needs
∆ to be not smaller than d to perform reasonably. Note also
that there is little change after ∆ = 50 and that C+E 3 is very
robust wrt the sampling horizon. Figure 7 shows the average number of actions for E as a function of the sampling
horizon. Note how the number of actions sharply decreases
initially when the schedule horizon is increased from 0 to 20
and then 40 time steps. Similarly, Figure 8 depicts the number of promising actions identified by C. Once again, the
number of actions sharply increases when ∆ moves from 0
to 20 and then 40. It is basically stable after that.
Once again, these results indicate the value of consensus
which makes the approach much less sensitive to the sampling horizon and always outperforms the oblivious algorithms. This is not the case of Algorithm E which exhibits
pathological behavior for low sampling horizons.
Effect of the Number of Classes
2.8
Avg Non Zero Actions
2.6
2.4
2.2
Actions
2
1.8
1.6
1.4
1.2
1
0.8
0
20
40
60
80
100
120
Sampling Horizon
140
160
180
200
Figure 8: Number of Promising Actions wrt the Sampling
Horizon
Figure 9 depicts the effect of the number of packet classes
on the behaviour of the algorithms. The stochastic algorithms given a fixed number of optimizations (nbOpt=30)
and the sampling horizon is 50. The figure describes the
quality of the algorithms (i.e., the weighted loss) as the number of classes grow and depicts their average weighted loss
as a percentage over the theoretical offline optimum. The
number of optimizations (nbOpt=30) was chosen so that Algorithm E has at least one sample per action (i.e., when there
are 30 classes). The results show that, as the number of
classes increases, Algorithm C gets closer to Algorithm E
and outperforms it as soon as the number of classes reaches
20. Note also that Algorithm C+E 3 outperforms C and E
but the distance wrt C decreases as the number of classes
increases. Once again, these results shed light on when the
consensus approach (and its hybridization with the expectation approach) is beneficial. They indicate that the benefits
of the consensus approach are more dramatic as the number of classes increases. Note also that algorithm C remains
ICAPS 2004
225
between 20 and 25% from the optimum. Algorithm E starts
as 10% off the optimum but it quality quickly decreases to
40% or more as the number of classes increases.
Related Work
Online algorithms in computer science have been addressed
for numerous years. A good source for an overview of such
problems and techniques for solving them can be found in
(Fiat & Woeginger 1998). Research in online algorithms
has traditionally focused on techniques that are oblivious
to any information about the future and many results are
concerned with the worst case in the form of the competitive ratio (Karlin et al. 1988). It has only been recently that researchers have begun to address online problems where information about future uncertainty is known
and how such information may increase the performance
of algorithms. This includes scheduling problems (Chang,
Givan, & Chong 2000), vehicle routing problems (Bent &
Van Hentenryck 2003), (Bent & Van Hentenryck 2001),
(Cambell & Savelsbergh 2002) and elevator dispatching
(Nikovski & Branch 2003) to name a few. Research on
these problems has varied widely, but the unifying theme is
that knowing probabilistic information about the future significantly increases performance. The consensus approach
proposed in this paper was motivated by online stochastic
vehicle routing proposed in (Bent & Van Hentenryck 2003;
2001). In these algorithms, routing plans are generated continously during plan execution. They are ranked by a consensus function and the chosen plan is used to make the departure decisions. In these routing problems, only 2 to 10
scenarios can be solved in between two events and the number of events is large (e.g., 50 different requests).
Conclusion
This paper reconsidered the online packet scheduling in
computer networks proposed in (Chang, Givan, & Chong
2000) and made a number of contributions. First, it proposed a consensus approach to sampling and showed experimentally how the consensus approach outperforms the
expectation approach from (Chang, Givan, & Chong 2000)
when the number of scenarios that can be solved at decision
time is small. Second, the paper shows how the consensus
and expectation approaches may be hybridized to produce
an effective algorithm outperforming both approaches most
of the time. The hybrid algorithm uses the consensus approach to select the most promising actions which are then
evaluated using the expectation approach.
More generally, the paper confirms the value of consensus
in online stochastic optimization. It indicates the consensus is very effective whenever the number of scenarios that
can be solved before decision time is small, which occur in
many practical problems and justifies the design of online
vehicle routing algorithms (Bent & Van Hentenryck 2003;
2001). It also indicated that the consensus methodology
complements the expectation approach even when large
numbers of optimizations are available.
There are numerous directions for future directions. First,
it would be interesting to scale these algorithms to packing
226
ICAPS 2004
scheduling with parallel routers as well as more complicated
problems such online vehicle routing and job-shop scheduling. Second, these algorithms are dependent to a certain
degree on the sampling accuracy. It would be interesting
to integrate learning techniques to approximate the underlying distributions of the job arrivals (and perhaps to change
the distributions over time), as well as to determine the robustness of the approaches and how well the approach they
adapt to changes. Finally, it would be interesting to determine if the consensus approach, and its hybridization with
the expectation algorithm, are relevant, and bring benefits
for, general POMDPs.
Acknowledgments
Many thanks to the anonymous reviewers for some excellent
remarks and suggestions. This work was partially supported
by NSF ITR Awards DMI-0121495 and ACI-0121497.
References
Bent, R., and Van Hentenryck, P. 2001. Scenario Based
Planning for Partially Dynamic Vehicle Routing Problems
with Stochastic Customers. Operations Research. (to appear).
Bent, R., and Van Hentenryck, P. 2003. Dynamic Vehicle Routing with Stochastic requests. International Joint
Conference on Artificial Intelligence (IJCAI’03).
Cambell, A., and Savelsbergh, M. 2002. Decision Support
for Consumer Direct Grocery Initiatives. Report TLI-0209, Georgia Institute of Technology.
Chang, H.; Givan, R.; and Chong, E. 2000. On-line
Scheduling Via Sampling. Artificial Intelligence Planning
and Scheduling (AIPS’00) 62–71.
Fiat, A., and Woeginger, G. 1998. Online Algorithms: The
State of the Art.
Karlin, A.; Manasse, M.; Rudolph, L.; and Sleator, D.
1988. Competitive Snoopy Caching. Algorithmica 3:79–
119.
Kearns, M.; Mansour, Y.; and Ng, A. 1999a. A Sparse
Sampling Alogorithm for Near-Optimal Planning in Large
Markov Decision Processes. International Joint Conference on Artificial Intelligence (IJCAI’99).
Kearns, M.; Mansour, Y.; and Ng, A. 1999b. Approximate
Planning in Large POMDPs via Reusable Tragectories. Advances in Neural Information Processing Systems.
McAllester, D., and Singh, S. 1999. Approximate Planning
for Factored POMDPs Using Belief State Simplification.
Uncertainity in AI (UAI’99).
Nikovski, D., and Branch, M. 2003. Marginalizing Out
Future Passengers in Group Elevator Control. Uncertainity
in Artificial Intelligence (UAI’03).
Stefik, M. 1981. Planning with Constraints (MOLGEN:
Part 1). Artificial Intelligence 16:111–139.
Villareal, F., and Bulfin, R. 1983. Scheduling a Single
Machine to Minimize the Weighted Number of Tardy Jobs.
IEEE Transactions 337–343.