Stokes’ System in a Domain with Oscillating Boundary:
advertisement

Stokes’ System in a Domain with Oscillating Boundary:
Homogenization and Error Analysis of an Interior
Optimal Control Problem
A. K. Nandakumaran∗, Ravi Prakash†and J-P. Raymond‡
Abstract. Homogenization and error analysis of an optimal interior control problem in
the framework of Stokes’ system, on a domain with rapidly oscillating boundary, are the
subject matters of this article. We consider a three dimensional domain constituted of a
parallelepiped with a large number of rectangular cylinders at the top of it. An interior
control is applied in a proper sub-domain of the parallelepiped, away from the oscillating
volume. We consider two types of functionals, namely a functional involving the L2 -norm
of the state variable and another one involving its H 1 -norm. The asymptotic analysis of
optimality systems for both cases, when the cross sectional area of the rectangular cylinders
tends to zero, is done here. Our major contribution is to derive error estimates for the state,
the co-state and the associated pressures, in appropriate functional spaces.
Key Words. Stokes’ system, optimal control, homogenization, oscillating boundary, interior
control, adjoint system, error estimates.
MSC(2000). 35B27, 35B40, 35B37, 49J20, 49K20
1
Introduction
In this article, we consider the Stokes’ system in a bounded domain in R3 whose boundary
is rapidly oscillating. The problems in domains with oscillatory boundaries have important
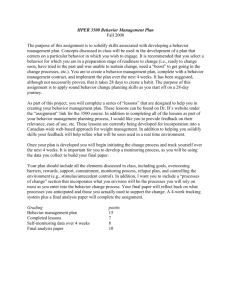
applications in industry. We basically, consider a three dimensional cube (for simplicity)
with, attached on one side, a large number of square pillars (see Figure 1) of length O(1),
but whose cross sectional area is of order ε2 . As ε → 0, this gives a geometrical domain with
a rapidly oscillating boundary. Our intention is to consider a distributed optimal control
problem associated to a Stokes’ system in such a domain and to study the relevant homogenization to obtain the limit system. Our major issue is to obtain some corrector estimates.
The limit analysis of problems posed in domains with rapidly oscillating boundaries models
a large number of physical applications. The authors recently studied such a homogenization
problem for the Laplace operator in [?].
∗
Department of Mathematics,
Indian Institute of Science,
Bangalore,
India,
email:
nands@math.iisc.ernet.in
†
Department of Mathematics, Indian Institute of Science, Bangalore, India, email: ravi@math.iisc.ernet.in
‡
Institut de Mathématiques de Toulouse, Université Paul Sabatier & CNRS, 31062 Toulouse Cedex,
France, email: raymond@math.univ-toulouse.fr
1
In particular, the applications include flows with rough boundaries, rough interface, as
well as airflow through compression systems in turbo machines such as jet engine. The
Viscous-Moore-Greitzer equation derived from Scaled Navier-Stokes equations (see [?], [?],
[?]) models such a situation and, actually, our present and our earlier works are motivated by
these issues. For a detailed analytical treatment of the Navier-Stokes equations, we refer to
[?]. Quite often, such models lead to optimal control or controllability problems of evolution
equations whose boundary is not only oscillatory, but moving as well. Such boundaries can
be modeled via functions of both spatial and time variables. We do not attempt to do this
in the article, we consider a simple problem described by the Stokes’ system.
The literature on the asymptotic analysis of problems with oscillating boundaries is
extensive and we refer to [?], [?], [?], [?], [?], [?], [?], [?], [?], [?], [?], and the references
therein. But little work is available for the corresponding control problems and we refer
to [?], [?], [?], [?] in that direction. We do not pretend to be exhaustive. Some standard
references in homogenization theory are [?], [?], [?], [?]. Regarding the homogenization of
optimal control or controllability problems, some of the references are [?], [?], [?], [?]. A few
references are concerned with optimal control problems and derivation of optimality systems,
one can refer to [?], [?], [?], [?], [?], [?], [?].
In the present paper, we study optimal control problems for models already studied in
[?]. In [?], the authors derive a wall law for the model considered here and in [?]. The
system associated to this wall law is used to obtain errors estimates both on the velocity and
pressure in Ω− . Here, motivated by [?], we use suitable test functions to get error estimates
−
for the velocity term separately in Ω+
ε and Ω , which is not the case in [?].
The plan of the paper is as follows. We describe the geometrical setting and the control
problems we want to deal with in Section 2. We introduce two types of cost functionals,
namely a L2 cost functional and a Dirichlet type cost functional. The limit of the solutions
for the control problem associated with the L2 cost functional, as well as correctors and
asymptotic approximations, are studied in Section 3. The corresponding results for the
Dirichlet cost functional are derived in Section 4.
2
2.1
Setting of the problems
Geometrical domain
The purpose of this paper is to analyze the asymptotic behavior of the optimality system
associated with the Stokes’ system with an interior control in a varying domain Ωε , where
ε is a positive small parameter, tending to zero. Here we will discuss two types of cost
functionals. The first one, hereafter called the L2 −cost functional, will involve the L2 −norm
of the state variable and of the interior control, whereas in the second one, called the Dirichlet
cost functional, we consider the H 1 −norm of the state variable with the L2 −norm of the
interior control.
To define the domain Ωε , let us denote A = [0, L1 ] × [0, L2 ] and  = [a1 , b1 ] × [a2 , b2 ],
where 0 < aj < bj < Lj , j = 1, 2, are positive real numbers. For the future convenience in
the conclusion of regularity results, let g be a smooth function from R2 to R, A-periodic.
Using g, we define the lower boundary of domain Ωε , namely
Γb = {(x0 , x3 ) ∈ R3 | x3 = g(x0 ), x0 ∈ A}.
2
Let us set
m := max{|g(x0 )|, x0 ∈ A}.
Further, set Aε := εA and Âε := εÂ. For M 0 > M > m, define the Aε -periodic function ηε
from R2 to R by
M0
if x0 ∈ Âε ,
0
ηε (x ) =
M
if x0 ∈ Aε \ Âε ,
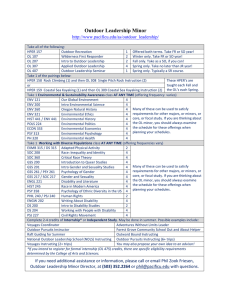
We consider the following domain (see Figure 1) Ωε , as
Ωε = {(x0 , x3 ) ∈ R3 | x0 ∈ A, g(x0 ) < x3 < ηε (x0 )}.
The oscillating domain Ωε has a fixed region Ω− (unaffected by the oscillating boundary),
defined by
Ω− = {(x0 , x3 )| x0 ∈ A, g(x0 ) < x3 < M }.
The upper and lateral boundaries Γu , Γs of Ω− can be, respectively, described as
Γu = {(x0 , M ) | x0 ∈ A}
and
Γs = {(x0 , x3 ) | x0 ∈ ∂A, g(x0 ) ≤ x3 ≤ M },
where ∂A is the boundary of the reference cell A. Let us denote by Ω+
ε the upper oscillating
part of the oscillating volume, i.e.
0
3
0
0
Ω+
ε = {(x , x3 ) ∈ R | x ∈ A, M < x3 < ηε (x )}.
−
Let Γε be the interface between Ω+
ε and Ω . Consequently, we can write
Ωε = Ω− ∪ Γε ∪ Ω+
ε.
Analogous to g, the graph of ηε constructs the oscillating boundary part of domain Ωε ,
namely,
+
γε = ∂Ω+
ε \ Γu ∪ Γu \ ∂Ωε .
Notice that, Ω+
ε is constituted of cylindrical periodic bumps of rectangular cross-section,
situated at the top of a fixed domain Ω− . We can also visualize Ωε as a domain Ω− together
with a large number of bumps (O(ε−2 )) having cross-section of order ε and fixed height
(M 0 − M ). If we denote the boundary of Ωε by ∂Ωε , then we can decompose it as
∂Ωε = Γb ∪ Γs ∪ γε .
Finally, we introduce the full domain Ω as,
Ω = {(x0 , x3 ) ∈ R3 | x0 ∈ A, g(x0 ) < x3 < M 0 }.
We denote by Ω̃ε , the periodic extension of Ωε in the x1 and x2 directions. For this extension,
we introduce the notion of Γs −periodic functions if they take same values on both sides of
m
Γs . Moreover, Hper
(Ωε ) is the subspace of functions which can be extended to functions
m
belonging to Hloc (R3 ) and which are Γs −periodic. The same type of notation is used for
other spaces, in particular for L2 (Ωε ).
3
Figure 1: Domain
Let ω ⊂⊂ Ω− be a sub-domain of Ω− in which control acts. Without loss of generality,
we assume that
ω = {(x0 , x3 )| x0 ∈ A, g(x1 ) < x3 < M − },
where M > M − > m.
2.2
Control problems
3
For a control function θ ∈ L2per (ω) acting in the sub-domain ω, we consider the Stokes’
system (κ > 0)
−κ∆yε + ∇pε = f + θχω in Ωε ,
∇ · yε = 0 in Ωε ,
yε = 0 on γε , yε = u on Γb ,
(2.1)
Z
pε = 0,
Ω−
(yε , ∇pε ) is Γs − periodic,
3
3
1/2
where f ∈ L2per (Ω) and u ∈ Hper (Γb ) such that u · ν = 0, where ν is a outward unit
normal at Γb .
3
3
3
1/2
2
2
Theorem 2.1. For all f ∈ Lper (Ω) , θ ∈ Lper (ω) and u ∈ Hper (Γb ) satisfying
3
1
u · ν = 0, equation (2.1) admits a unique solution (yε (θ), pε (θ)) in Hper
(Ωε ) × L2per (Ωε ),
4
and
(2.2)
kyε k(H 1 (Ωε ))3 + kpε kL2 (Ω− )
≤ C kf k(L2 (Ω))3 + kθk(L2 (ω))3 + kuk
where C is a positive constant independent of ε, and
(2.3)
kpε kL2 (Ωε ) ≤ Cε kf k(L2 (Ω))3 + kθk(L2 (ω))3 + kuk
3
(H 1/2 (Γb ))
,
3
(H 1/2 (Γb ))
,
where Cε > 0 depends on ε.
Proof. For δ > 0 small enough, we first introduce the subdomain
0
0
0
Ω−
δ = {(x , x3 ) | x ∈ A, g(x ) < x3 < M − δ},
and its upper and lateral boundaries Γu,δ and Γs,δ defined by
Γu,δ = {(x0 , M − δ) : x0 ∈ A}
and
Γs,δ = {(x0 , x3 ) : x0 ∈ ∂A, g(x0 ) ≤ x3 ≤ M − δ}.
Next, we denote by yu the solution to
∇ · yu = 0 in Ω−
δ ,
yu = 0 on Γu,δ , yu = u on Γb ,
(2.4)
yu is Γs,δ − periodic.
¿From [?], it follows that equation (2.4) admits a solution which satisfies
(2.5)
kyu k
3
(H 1 (Ω−δ ))
≤ Ckuk H 1/2 (Γ ) 3 .
(
b )
We denote by ỹu the extension of yu by zero to Ωε \ Ω−
δ . We have ∇ · ỹu = 0 in Ωε and
(2.6)
kỹu k(H 1 (Ωε ))3 ≤ Ckuk H 1/2 (Γ ) 3 .
(
b )
We look for the solution (yε (θ), pε (θ)) to equation (2.1) in the form yε (θ) = yu + ζε (θ). The
pair (ζε (θ), pε (θ)) satisfies the system
−κ∆ζε + ∇pε = κ∆ỹu + f + θχω in Ωε ,
∇ · ζε = 0 in Ωε ,
ζε = 0 on γε , ζε = 0 on Γb ,
(2.7)
Z
pε = 0,
Ω−
(ζε , ∇pε ) is Γs − periodic.
We set
1
1
(Hper,Γ
(Ωε ))3 = {z ∈ (Hper
(Ωε ))3 | z|Γb = 0},
b
5
−1
(Ωε ) its dual. The source term ∆ỹu may be identified with an
and we denote by Hper,Γ
b
−1
3
element in (Hper,Γb (Ωε )) by the formula
Z
1
h∆ỹu , φi = −
∇ỹu : ∇φ, for all φ ∈ (Hper,Γ
(Ωε ))3 .
b
Ωε
¿From the variational formulation of equation (2.7), it follows that
Z
Z
Z
2
κ
|∇ζε | = −κ
∇ỹu : ∇ζε +
(f + χω θ)ζε .
Ωε
Ωε
Ωε
Thus, with Young’s and Poincaré’s inequalities, it follows that
kζε k(H 1 (Ωε ))3 ≤ C kf k(L2 (Ω))3 + kθk(L2 (ω))3 + kỹu k(H 1 (Ωε ))3
(2.8)
≤ C kf k(L2 (Ω))3 + kθk(L2 (ω))3 + kuk H 1/2 (Γ ) 3 .
(
b )
This gives the following estimate for yε
kyε k(H 1 (Ωε ))3 ≤ C kf k(L2 (Ω))3 + kθk(L2 (ω))3 + kuk
(H 1/2 (Γb ))
3
,
where C is independent of ε.
The estimate of pε in L2per (Ωε ) may be obtained with equation (2.7) in a classical way.
But the constant in the estimate depends on the domain, and therefore depends on ε. Let
us explain how we can obtain an estimate of pε in L2per (Ω− ) independent of ε. For that, we
introduce
1
− 3
1
− 3
(Hper,Γ
Ω
)
=
{z
∈
(H
Ω
) | z|Γb = 0 and z|Γu = 0},
∪Γ
per
u
b
−1
1
and we denote by (Hper,Γ
(Ω− ))3 . We identify the restriction
(Ω− ))3 the dual of (Hper,Γ
b ∪Γu
b ∪Γu
−1
of ∆yε to Ω− as an element in (Hper,Γ
(Ωε ))3 in the following way
b ∪Γu
Z
1
h∆yε , φi = −
∇yε : ∇φ, for all φ ∈ (Hper,Γ
(Ωε ))3 .
b ∪Γu
Ω−
3
Since yε is bounded in (H 1 (Ωε )) uniformly with respect to ε, it is also bounded uniformly
3
3
in (H 1 (Ω− )) . Thus ∆yε |Ω− is bounded in (H 1 (Ω− )) . From the equality
∇pε = f + θχω + κ∆yε ,
−1
we deduce that ∇pε |Ω− is bounded in (Hper,Γ
(Ω− ))3 , more precisely
b ∪Γu
k∇pε |Ω− k(H −1
kf k(L2 (Ω))3 + kθk(L2 (ω))3 + kuk H 1/2 (Γ ) 3 .
− 3 ≤ C
per,Γb ∪Γu (Ω ))
(
b )
Estimate (2.3) may be obtained from the previous one and from the following inequality
Z
2
−
p = 0.
kpkL2per (Ω− ) ≤ Ck∇pk(H −1
for all p ∈ Lper Ω
obeying
(Ω− ))3
per,Γb ∪Γu
Ω−
This last inequality may be proved as in [?, Lemma 1.5.4].
6
We consider the following two cost functionals, for which we are going to analyze optimality issues, namely
Z
Z
β
1
2
|yε − yd | +
|θ|2
J1,ε (yε , θ) =
2 Ωε
2 ω
and
1
J2,ε (yε , θ) =
2
Z
β
|∇ (yε − yd )| +
2
Ωε
2
Z
|θ|2 ,
ω
2
with β > 0, yd is a given desired state. For the L −cost functional J1,ε , we assume yd ∈
1
(L2per (Ω))3 , while we assume that yd ∈ (Hper
(Ω)) for the Dirichlet cost functional J2,ε . Since
we are going to see that yε is of order ε, i.e. O(ε) in the upper part Ω+
ε , it is reasonable to
assume supp (yd ) ⊂ Ω− . This assumption is in force throughout the paper.
We now introduce the following two optimal control problems
3
(P1,ε )
inf{J1,ε (yε , θ) | θ ∈ L2per (ω) , (yε , pε , θ) solves (2.1)}
and
(P2,ε )
inf{J2,ε (yε , θ) | θ ∈ L2per (ω)
3
, (yε , pε , θ) solves (2.1)},
corresponding to cost functionals J1,ε and J2,ε , respectively. Our aim in this article is to
study the asymptotic analysis of the optimal solution (ȳε , p̄ε , θ̄ε ) for each of these problems.
3
L2-Cost functional
In section 3.1, we derive the optimality system for problem (P1,ε ) and we introduce the
limit system in section 3.2. The passage to the limit in the optimality system for problem
(P1,ε ), when ε goes to zero, is carried out in section 3.3. In order to obtain correctors
and asymptotic approximations, we introduce test functions in section 3.4. Precise errors
estimates are obtained in section 3.5.
3.1
Optimality System
By standard arguments, we can prove that, for each ε > 0, the minimization problem (P1,ε )
3
3
1
has a unique minimizer ȳε , θ̄ε ∈ Hper
(Ωε ) × L2per (ω) . Let (ȳε , p̄ε ) be the solution of
(2.1) when θ = θ̄ε . We call ȳε , p̄ε , θ̄ε , the optimal solution of (P1,ε ), where θ̄ε is the optimal
control, ȳε the optimal state and p̄ε the corresponding pressure in the Stokes’ system (2.1).
Further, it can be characterized using the adjoint state (co-state) z̄ε , where z̄ε along with
adjoint pressure q̄ε solves the adjoint problem
−κ∆z̄ε + ∇q̄ε = ȳε − yd in Ωε ,
∇ · z̄ε = 0 in Ωε ,
z̄ε = 0 on γε ∪ Γb ,
(3.1)
Z
q̄ε = 0,
Ω−
(z̄ε , ∇q̄ε ) is Γs − periodic.
7
Following the classical way for proving the necessary as well as sufficient conditions for
optimality and for setting up the optimality system (see e.g. [?]), one can easily establish
the following theorem for (P1,ε ).
3
Theorem 3.1. Let f ∈ L2per (Ω) and ȳε , p̄ε , θ̄ε be the optimal solution of (P1,ε ). Let
3
1
(Ωε ) × L2per (Ωε ) solves (3.1), then the optimal control is given by
(z̄ε , q̄ε ) ∈ Hper
1
θ̄ε = − z̄ε χω .
β
3
3
1
1
(Ωε ) and (p̂ε , q̂ε ) ∈
(Ωε ) × Hper
Conversely, assume that the pairs (ŷε , ẑε ) ∈ Hper
L2per (Ωε ) × L2per (Ωε ) solve the optimality system
(3.2)
1
−κ∆ŷε + ∇p̂ε = f − ẑε χω in Ωε ,
β
∇
·
ŷ
=
0
in
Ω
,
ε
ε
ŷε = 0 on γε , ŷε = u on Γb ,
Z
p̂ε = 0,
Ω−
(ŷ , ∇p̂ ) is Γ − periodic
ε
(3.3)
ε
s
−κ∆ẑε + ∇q̂ε = ŷε − yd in Ωε ,
∇ · ẑε = 0 in Ωε ,
ẑε = 0 on γε ∪ Γb ,
Z
q̂ε = 0,
−
Ω
(ẑε , ∇q̂ε ) is Γs − periodic.
1
Then, the triplet ŷε , p̂ε , − ẑε χω is the optimal solution to (P1,ε ).
β
3.2
Limit System
To introduce the limit system, we need to go through a minimization problem corresponding
3
to the following Stokes’ system in the fixed domain Ω− . Given θ ∈ L2per (ω) , let (y, p) ∈
3
1
Hper
(Ω− ) × L2per (Ω− ) be the unique solution to
(3.4)
−κ∆y + ∇p = f + θχω in Ω− ,
∇ · y = 0 in Ω− ,
y = 0 on Γu , y = u on Γb ,
Z
p = 0,
Ω−
(y, ∇p) is Γs − periodic.
8
Let J1 be the cost functional defined by
Z
Z
1
β
2
(3.5)
J1 (y, θ) =
|y − yd | +
|θ|2 .
2 Ω−
2 ω
The corresponding minimization problem is
(P1 )
3
inf{J1 (y, θ) | θ ∈ L2per (ω) , (y, p, θ) obeys (3.4)},
3
1
As in subsection 3.1, one can ensure the existence and uniqueness of (ȳ, θ̄) ∈ Hper
(Ω− ) ×
3
L2per (Ω− ) as a minimizer of (P1 ) and the corresponding pressure p̄ ∈ L2per (Ω− ). The
3
1
1
(Ω− ) , q̄ ∈ L2per (Ω− ) solve
optimal control θ̄ is characterized by θ̄ = − z̄, where z̄ ∈ Hper
β
−κ∆z̄ + ∇q̄ = ȳ − yd in Ω− ,
∇ · z̄ = 0 in Ω− ,
z̄ = 0 on Γu ∪ Γb ,
(3.6)
Z
q̄ = 0,
−
Ω
(z̄, ∇q̄) is Γs − periodic.
Moreover, we have following result analogous to Theorem 3.1.
Theorem 3.2. Let f ∈ L2per (Ω) and ȳ, p̄, θ̄ be the optimal solution of (P1 ). The optimal
control is given by
1
θ̄ = − z̄χω ,
β
3
1
where (z̄, q̄) ∈ Hper
(Ω− ) × L2per (Ω− ) solves (3.1).
3
3
1
1
Conversely, assume that the pairs (ŷ, ẑ) ∈ Hper
(Ω− ) × Hper
(Ω− ) and (p̂, q̂) ∈
L2per (Ω− ) × L2per (Ω− ) solve the optimality systems
1
−κ∆ŷ + ∇p̂ = f − ẑχω in Ω− ,
β
−
∇
·
ŷ
=
0
in
Ω
,
ŷ = 0 on Γu , ŷ = u on Γb ,
(3.7)
Z
p̂ = 0,
Ω−
(ŷ, ∇p̂) is Γ − periodic,
s
−κ∆ẑ + ∇q̂ = ŷ − yd in Ω− ,
∇ · ẑ = 0 in Ω− ,
ẑ = 0 on Γu ∪ Γb ,
(3.8)
Z
q̂ = 0,
−
Ω
(ẑ, ∇q̂) is Γs − periodic.
1
Then, the triplet ŷ, p̂, − ẑχω is the optimal solution to (P1 ).
β
9
3.3
Estimates and Asymptotic Analysis
We now establish convergence results for the optimal state, co-state, pressure, adjoint pressure and optimal control corresponding to (P1,ε ) in appropriate functional spaces.
Theorem 3.3. Let ȳε , p̄ε , θ̄ε and ȳ, p̄, θ̄ be, respectively, the optimal solution of (P1,ε )
and (P1 ). Suppose (z̄ε , q̄ε ) and (z̄, q̄) be the co-states and adjoint pressures appeared in the
discussion of problem (P1,ε ) and (P1 ), respectively. Then
3
1
ȳ˜ε → ȳ˜ strongly in Hper
(Ω) ,
p̄ε → p̄ strongly in L2per (Ω− ) ,
3
1
(ω) ,
θ̄ε → θ̄ strongly in Hper
3
1
z̄˜ε → z̄˜ strongly in Hper
(Ω) ,
q̄ε → q̄ strongly in L2per (Ω− ) ,
where
ȳ˜ =
0 in Ω+ ,
ȳ in Ω− ,
and z̄˜ =
0 in Ω+ ,
z̄ in Ω− .
Moreover
J1,ε ȳε , θ̄ε −→ J1 ȳ, θ̄
when ε −→ 0.
Note: ȳ˜ε , z̄˜ε , denote the extension by 0 of ȳε , z̄ε , respectively, to Ω, and thus (ȳ˜ε , z̄˜ε ) ∈
3
3
1
1
Hper
(Ω) × Hper
(Ω) .
Proof. Step 1. Uniform estimates. Let ȳε , p̄ε , θ̄ε be the optimal solution of (P1,ε ). If we
denote by yε (0) the solution to equation (2.1) corresponding to θ = 0 in ω, we have
J1,ε ȳε , θ̄ε ≤ J1,ε (yε (0), 0) .
¿From Theorem 2.1, it follows that
(3.9)
kθ̄ε k(L2 (ω))3 ≤
2
J1,ε (yε (0), 0) ≤ C,
β
where C is independent of ε. Still with Theorem 2.1, it follows that
(3.10)
kȳ˜ε k(H 1 (Ω))3 = kȳε k(H 1 (Ωε ))3 ≤ C,
and
(3.11)
kp̄ε kL2 (Ω− ) ≤ C,
where the different constants C are independent of ε. Applying Theorem 2.1 to the adjoint
system (3.1), we obtain
(3.12)
kz̄ε k(H 1 (Ωε ))3 ≤ C,
10
and
kq̄ε kL2 (Ω− ) ≤ C,
(3.13)
with C > 0 is independent of ε. From the characterization of θ̄ε in Theorem 3.1, we get
kθ̄ε k(H 1 (ω))3 ≤ C.
(3.14)
Step 2. Passage to the limit. With the above estimates in (3.10)-(3.14), we can deduce the
3
3
3
1
1
1
existence of (y0 , p0 , θ0 , z0 , q0 ) ∈ Hper
(Ω) ×L2per (Ω− )× Hper
(ω) × Hper
(Ω) ×L2per (Ω− ),
the existence of subsequences still indexed by ε to simplify the notation, and the following
convergence when ε tends to zero
(3.15)
3
1
ȳ˜ε * y0 weakly in Hper
(Ω) ,
(3.16)
p̄ε * p0 weakly in L2per Ω− ,
(3.17)
3
1
θ̄ε * θ0 weakly in Hper
(ω) ,
(3.18)
3
1
z̄˜ε * z0 weakly in Hper
(Ω) ,
(3.19)
q̄ε * q0 weakly in L2per Ω− .
With (3.17) and (3.18), the characterization of θ̄ε gives
1
θ0 = − z0 χω .
β
(3.20)
+
−
Let χΩ+ε be the characteristic function of Ω+
ε ⊂ Ω = Ω \ Ω , then as in other convergence
of periodic oscillatory functions, we get
(3.21)
χΩ+ε * K weakly∗ in L∞ Ω+ , where
K=
1
(b1 − a1 )(b2 − a2 ).
L1 L2
By (3.15) and compact embedding theorems, we have
3
ȳ˜ε −→ y0 strongly in L2per (Ω) ,
(3.22)
Now, according to (3.21) and (3.22), passing to the limit in the equality ȳ˜ε = ȳ˜ε χΩ+ε , we see
that y0 = 0 in Ω+ since K 6= 0. Similarly, z0 = 0 in Ω+ . Moreover, z0 = 0 on Γb . For θ = θ̄ε ,
weak formulation of (2.1) gives us
Z
Z
Z
Z
κ
∇ȳε · ∇ϕ −
p̄ε (∇ · ϕ) =
f · ϕ + θ̄ε · ϕ
Ω−
Ω−
Ω−
11
ω
for all smooth function ϕ with compact support in Ω− . So, with (3.15), (3.16) and (3.17),
we can prove that y0 , p0 and θ0 satisfy
−
−κ∆y0 + ∇p0 = f + θ0 χω in Ω ,
∇ · y0 = 0 in Ω− ,
y0 = 0 on Γu , y0 = u on Γb ,
(3.23)
Z
p0 = 0,
Ω−
(y0 , ∇p0 ) is Γs − periodic.
Similarly, we can prove that z0 and q0 satisfy the system
−κ∆z0 + ∇q0 = y0 − yd in Ω− ,
∇ · z0 = 0 in Ω− ,
z0 = 0 on Γu ∪ Γb ,
(3.24)
Z
q0 = 0
Ω−
(z0 , ∇q0 ) is Γs − periodic.
Since θ0 = − β1 z0 χω , from the converse part of Theorem 3.2, it follows that (y0 , p0 , θ0 ) is the
optimal solution to (P1 ). Thus, we get
y0 = ȳ˜, p0 = p̄, z0 = z̄˜, θ0 = θ̄ and q0 = q̄.
Further
J1,ε ȳε , θ̄ε −→ J1 ȳ, θ̄
when ε −→ 0.
3
1
In fact, we get the strong convergence of ȳ˜ε in Hper
(Ω) , as well as of z̄˜ε , and hence for the
control θ̄ε . By using ȳε and ȳ as a test functions in (2.1) and (3.4) respectively, and from
the convergences stated in (3.15) and (3.17), we get
Z
Z
Z
∂ ȳε
,u
lim κ ∇ȳ˜ε · ∇ȳ˜ε = lim f · ȳ˜ε + θ̄ε · ȳ˜ε +
3
3
ε→0 Ω
ε→0
∂ν
Ω
ω
(H −1/2 (Γb )) ,(H 1/2 (Γb ))
Z
Z
∂ ȳ
=
f · ȳ˜ + θ̄ · ȳ˜ +
,u
3
3
∂ν
ω
Ω
(H −1/2 (Γb )) ,(H 1/2 (Γb ))
Z
= κ ∇ȳ˜ · ∇ȳ˜.
Ω
3
1
Thus ȳ˜ε −→ ȳ strongly in Hper
(Ω) . A similar analysis will provide the strong conver3
3
1
1
gence of z̄˜ε in Hper
(Ω) . The strong convergences of ȳ˜ε , z̄˜ε in Hper
(Ω) and of θ̄ε in
3
1
Hper
(ω) will give us the strong convergence of p̄ε , q̄ε in L2per (Ω− ). Notice
k∇p̄ε − ∇p̄k(H −1 (Ω− ))3 = Ckκ∆ (ȳε − ȳ) + θ̄ε − θ̄ χω k(H −1 (Ω− ))3
≤ C kȳε − ȳk(H 1 (Ω− ))3 + kθ̄ε − θ̄k(H 1 (ω))3 ,
3
which gives ∇p̄ε → ∇p̄ strongly in (H 1 (Ω− )) and p̄ε → p̄ strongly in L2per (Ω− ). The strong
convergence of q̄ε in L2per (Ω− ) is obtained in a similar way. The proof is complete.
12
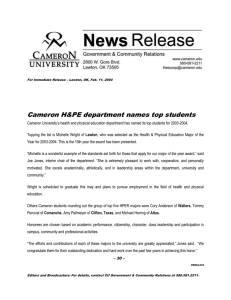
Figure 2: Reference domain
3.4
Test Functions and Preliminary Results
In this section, we borrow certain test functions and results from [?], [?], which will be useful
in the asymptotic approximation of the optimal state variable ȳε and the corresponding
pressure p̄ε of optimal control problem (P1,ε ). Moreover, these test functions will also be
used for the co-state variable z̄ε and the corresponding pressure q̄ε appeared in the adjoint
system of optimal control problem (P1,ε ).
Recall the domains A and  defined in the introduction. Let Λ± be the domains defined
by Λ+ = Â × (0, ∞) and Λ− = A × (−∞, 0) (see Figure 2), which in some sense have to be
seen as an 1/ε scaling of Âε × (M, M 0 ) and Ω− respectively, and then extended up to infinity.
3
For i = 1, 2, consider the pairs (Ψi,+ , Π i,+ ) ∈ (H 1 (Λ+ )) × L2loc (Λ+ ) and (Ψi,− , Π i,− ) ∈
3
1
Hloc,per
(Λ− ) × L2loc,per (Λ− ) satisfying the following Stokes’ system
(3.25)
−κ∆Ψi,± + ∇Π i,± = 0 in Λ± ,
∇ · Ψi,± = 0 in Λ± ,
i,+
+
Ψ
=
0
on
∂Λ
\
Â
×
{0}
,
i,−
Ψ = 0 on (A × 0) \ Â × {0} ,
i,+
i,−
Ψ
=
Ψ
on
Â
×
{0}
,
i,+
i,+
i,−
i,−
i
σ
(Ψ
,
Π
)
n
=
σ
(Ψ
,
Π
)
n
+
κe
on
Â
×
{0}
,
Z
Π i,± dy = 0.
Λ±
13
Here, we have used the
n = (0, 0, 1)T , e1 = (1, 0, 0)T , e2 = (0, 1, 0)T ,
following notations:
σ (Ψ, Π) = −ΠI + κ ∇Ψ + (∇Ψ)T , ∂Λ+ denotes the boundary of Λ+ and I is the 3 × 3
9
identity matrix. It can be proved (see [?], [?]) that ∇Ψi,− ∈ (L2 (Λ− )) . Also observe that,
although Λ+ and Λ− are unbounded, the last condition in (3.25) may be satisfied, since other
properties in (3.25) imply that |∇Π i,± (y 0 , y3 )| ≤ C exp(−c|y3 |) in Λ± , where C and c are
positive constants. We denote by β i the mean of Ψi,− over an horizontal section of Λ− :
Z
1
i
Ψi,− (y 0 , −δ) dy 0 , δ ∈ (0, +∞).
(3.26)
β (δ) =
L1 L2 A
In [?], it is proved that β i = (β1i , β2i , 0), where βji ∈ R is independent of δ for i, j = 1, 2 and
the solution (Ψi,± (y 0 , y3 ), Π i,± (y 0 , y3 )) satisfy the property of exponential decay as y3 → ±∞.
As an immediate consequence of this result, we have:
Proposition 3.4. For i = 1, 2, let (Ψi,+ , Π i,+ ) and (Ψi,− , Π i,− ) be the solution of the problem
(3.25). Then, there exists a positive constant C, independent of ε, such that
Z Z i,+ x0 x3 − M 2
i,+ x0 x3 − M 2
Ψ
dx ≤ Cε,
,
,
dx + + Π
+
ε
ε
ε
ε
Ωε
Ωε
and
Z
2
Z
i,− x0 x3 − M
i
Ψ
,
− β dx +
ε
ε
−
Ω
Ω
3.5
i,− x0 x3 − M 2
Π
dx ≤ Cε.
,
ε
ε
−
Correctors and Asymptotic Approximation
In this subsection, we plan to derive correctors with the help of test functions introduced in
subsection 3.4. To obtain error estimates, we need the following regularity assumptions on
the data:
3
3
3
3
4
6
4
7/2
(3.27) f ∈ Hper
Ω− ∩ L2per (Ω) , g ∈ Hper
(A), yd ∈ Hper
Ω−
, u ∈ Hper
(Γb ) .
Remark 3.5. To get error estimates on the optimal state variable ȳε and the corresponding
pressure p̄ε of optimal control problem (P1,ε ), one will require (3.27), though for the co3
3
2
state and adjoint pressure, it is enough to have f ∈ Hper
(Ω− ) ∩ L2per (Ω) and u ∈
3
7/2
Hper (Γb ) .
Let O− be defined by
O− = (x0 , x2 ) ∈ R3 : x0 ∈ R2 , g (x0 ) < x3 < M .
This is the periodically extended domain Ω− in the x1 , x2 directions. Let (z̄, q̄) be extended
to O− periodically, denoted again by (z̄, q̄). Then the pair (z̄, q̄) solves the system
3
1
(z̄, q̄) ∈ Hper
(Ω− ) × L2per (Ω− ) ,
−κ∆z̄ + ∇q̄ = ȳ − y in O− ,
d
(3.28)
−
∇ · z̄ = 0 in O ,
z̄ = 0 on R2 × {M } ∪ {(x0 , g (x0 )) ∈ R3 : x0 ∈ R2 } .
14
Since the control θ̄ is located in ω, we only have θ̄χω ∈ L2 (ω), which is a source term in
(3.23). Therefore, we cannot deduce from the optimality system (3.23) and (3.24) that
3
3
6
5
× C 3 Ω− .
(3.29)
(ȳ, p̄) ∈ Hper
Ω−
× Hper
Ω− ⊂ C 4 Ω−
and
(3.30)
8
(z̄, q̄) ∈ Hper
Ω−
3
3
7
× Hper
Ω− ⊂ C 6 Ω−
× C 5 Ω− .
We, need such a regularity for the error estimates. Fortunately, we do not need such strong
smoothness in the entire domain Ω̄, it is enough to have the regularity in a neighborhood of
the upper boundary. In this direction, we define the band R as
M + M−
< x3 < M }.
2
Now, using a truncation argument, we can show that
3
3
5
6
(R) ⊂ C 4 R
(R) × Hper
(3.31)
(ȳ, p̄) ∈ Hper
× C3 R .
R = {(x0 , x3 ) | x0 ∈ A,
and
(3.32)
3
3
8
7
(z̄, q̄) ∈ Hper
(R) × Hper
(R) ⊂ C 6 R
× C5 R ,
since the dimension is n = 3. Let, for i=1, 2,
( i,+
Ψε (x) = Ψi,+
(3.33)
Ψiε (x) =
i,−
Ψi,−
ε (x) = Ψ
x0 x3 −M
, ε
ε
0
x x3 −M
, ε
ε
in Ω+
ε,
− β i in Ω−
and
(
(3.34)
Πεi (x) =
Πεi,+ (x) = Π i,+
Πεi,− (x) = Π i,−
x0 x3 −M
, ε
ε
0
x x3 −M
, ε
ε
in Ω+
ε,
in Ω− ,
where (Ψi,+ , Π i,+ ) and (Ψi,− , Π i,− ) denote the solution of problem (3.25).
Now we are in a position to introduce the error estimates. We need to introduce certain
X ∂ z̄i
test functions. Define B(x0 ) =
(x0 , M )β i for x0 ∈ A, where β i is given in (3.26), and
∂x
3
i=1,2
let us denote by ξε and θε the functions defined in Ωε by
X ∂ z̄i
+
ξ
(x)
=
(x0 , M )Ψi,+
in Ω+
ε
ε,
ε
∂x
3
i=1,2
0
X ∂ z̄i
x x3 − M
0
i,−
−
ξε (x) =
(x , M )Ψ
,
− B in Ω− ,
(3.35)
ξε (x) =
∂x
ε
ε
3
i=1,2
X ∂ z̄i
=
in Ω−
(x0 , M )Ψi,−
ε
∂x
3
i=1,2
and
(3.36)
X ∂ z̄i
+
θ
(x)
=
(x0 , M )Πεi,+ in Ω+
ε
ε,
∂x
3
i=1,2
θε (x) =
X ∂ z̄i
−
θ
(x)
=
(x0 , M )Πεi,− in Ω− .
ε
∂x3
i=1,2
Using these test functions, we are now in position to derive error estimates.
15
Theorem 3.6. Suppose the regularity assumption (3.27) holds. Let z̄ε be the optimal co-state
as in (3.1) and q̄ε be the corresponding pressure. Similarly, let z̄ be the optimal co-state as
in (3.6) and q̄ be the corresponding pressure. Assume ξε as defined in (3.35) and θε as in
(3.36). Then, there exists positive constants C1 , C2 , independent of ε, such that
kz̄ε − εξε+ k H 1 Ω+ 3 + kz̄ε − z̄ − εξε− k(H 1 (Ω− ))3 ≤ C1 ε + kȳε − ȳk(L2 (Ω− ))3
( ( ε ))
and
kq̄ε − q̄kL2 (Ω− ) ≤ C2
√
ε + kȳε − ȳk(L2 (Ω− ))3 ,
for ε small enough.
+
The proof of Theorem 3.6 requires another class of test functions. Let (ϑ+
ε , qε ) ∈
3
− 3
1
− −
1
× L2per (Ω− ) be the solution of
× L2per (Ω+
(Ω+
Hper
ε ) and (ϑε , qε ) ∈ Hper (Ω )
ε)
+
+
−κ∆ϑ+
ε + ∇qε = 0 in Ωε ,
−
−
−κ∆ϑ−
ε + ∇qε = 0 in Ω ,
+
+
∇ · ϑ+
ε = −∇ · ξε in Ωε ,
−
−
−
∇ · ϑε = −∇ · ξε in Ω ,
+
+
−
(3.37)
ϑ+
ε = −ξε on γε \ Γu , ϑε = ϑε − B on Γu \ γε ,
+
−
−
σ (ϑ+
ε , ∇qε ) n = σ (ϑε , ∇qε ) n on Γu \ γε ,
−
−
ϑ−
ε = −ξε on Γb , ϑε = B on γε ∩ Γu ,
Z
Z
1
qε− dx = −
θε− dx.
ε Ω−
Ω−
Let us also introduce τε and µε defined by
( +
+
+
τε (x) = z̄ε − εϑ+
ε − εξε in Ωε ,
(3.38)
τε (x) =
−
−
τε− (x) = z̄ε − z̄ − εϑ−
ε − εξε in Ω
and
(
(3.39)
µε (x) =
0
+
+
+
µ+
ε (x) = q̄ε (x) − q̄(x , M ) − εqε (x) − θε (x) in Ωε ,
−
−
−
µ−
ε (x) = q̄ε (x) − q̄(x) − εqε (x) − θε (x) in Ω .
3
1
Let the pair (ϑ, q) ∈ Hper
(Ω− ) × L2per (Ω− ) solves the Stokes’ system
−κ∆ϑ + ∇q = 0 in Ω− ,
∇ · ϑ = 0 in Ω− ,
ϑ = 0 on Γb , ϑ = B on Γu ,
(3.40)
Z
q dx = 0,
Ω−
(ϑ, ∇q) is Γs − periodic.
Remark 3.7. Observe that as in [?], it can be seen that B · n = 0 on Γu . Hence the
uniqueness of ϑ is well-defined (see [?]).
16
Set
(3.41)
ϑ̃ =
0 in Ω+ ,
ϑ in Ω− ,
q̃ =
0 in Ω+ ,
q in Ω− .
These test functions will be used in the error estimates and we need higher regularity results
for these test functions. The regularity assumptions (3.27), with (3.31) and (3.40), provide
the following regularity of (ϑ, q)
3
3
4
5
× C 2 Ω− .
× Hper
Ω− ⊂ C 3 Ω−
(3.42)
(ϑ, q) ∈ Hper
Ω−
Now, define the space
o
n
+ 3
1
: ∇ · φ = 0 in Ωε , φ|γε ∪Γb = 0 .
V (Ωε ) = φ ∈ Hper Ωε
Notice that (τε , µε ) belongs to V (Ωε ) × L2 (Ωε ), and that normal traces of their stress tensors
−1
3
−
−
2 (Γ \ γ )
coincide at Γu \ γε , i.e. σ (τε+ , ∇µ+
)
n
=
σ
(τ
,
∇µ
)
n
in
H
. Moreover,
u
ε
ε
ε
ε
Z
µ−
ε dx = 0. For simplicity, we set
Ω−
(3.43)
ϑε =
+
ϑ+
ε in Ωε ,
−
ϑ−
ε in Ω ,
qε =
qε+ in Ω+
ε,
−
qε in Ω− .
Proposition 3.8. Suppose the regularity assumption (3.27) holds. Let τε and µε be, respectively, defined by (3.38) and (3.39). Then, there exists positive constants C1 , C2 , independent
of ε, such that
3/2
kτε k(H 1 (Ωε ))3 ≤ C1 ε + kȳε − ȳk(L2 (Ω− ))3 ,
kµε kL2 (Ω− ) ≤ C2 ε3/2 + kȳε − ȳk(L2 (Ω− ))3 ,
for ε small enough.
Proof. By definition, (τε , µε ) is a weak solution of the Stokes’ system
X ∂ z̄i
0
εκ
∆
(x , M ) Ψi,+
ε
∂x
3
i=1,2
X
∂ z̄i 0
+2εκ
∇
(x , M ) ∇Ψi,+
ε
∂x3
i=1,2
X
∂ z̄i 0
i,+
−
∇
(x , M )Πε
− ∇ (q̄(x0 , M )) + ȳε
∂x
3
i=1,2
in Ω+
ε,
(3.44)
−κ∆τε + ∇µε =
X ∂ z̄i
0
εκ
∆
(x , M ) Ψi,−
ε
∂x
3
i=1,2
X ∂ z̄i
0
+2εκ
∇
(x , M ) ∇Ψi,−
ε
∂x
3
i=1,2
X
∂ z̄i 0
−
∇
(x , M )Πεi,− + (ȳε − ȳ)
∂x3
i=1,2
in Ω− .
17
Notice, ∇ · τε = 0. Using this fact after choosing τε as a test function in (3.44) and with
integration by parts, we get
XZ
∂ z̄i 0
−εκ
(x , M ) Ψi,+
∆
ε · τε
+
∂x
3
Ωε
i=1,2
X Z ∂ z̄i
0
∇
(x , M ) ∇τε · Ψi,+
−2εκ
ε
+
∂x
3
i=1,2 Ωε
Z
ȳε · τε
+
2
Ω+
ε
(3.45)
k∇τε k(L2 (Ωε ))9 =
XZ
∂ z̄i 0
−εκ
(x , M ) Ψi,−
∆
ε · τε
∂x
−
3
Ω
i=1,2 Z
X
∂ z̄i 0
−2εκ
∇
(x , M ) ∇τε · Ψi,−
ε
∂x
−
3
i=1,2 Ω
Z
+
(ȳε − ȳ) · τε
Ω−
Using the regularity of z̄ mentioned in (3.31), the Cauchy-Schwarz inequality and Proposition
3.4, one can easily prove
XZ
∂ z̄i 0
∆
(3.46) εκ
(x , M ) Ψi,+
ε · τε
+
∂x
3
Ω
ε
i=1,2
XZ
∂ z̄i 0
i,+
(x , M ) Ψε · τε ≤ Cε3/2 kτε k(L2 (Ω+ε ))3 ,
−2εκ
∆
+
∂x3
Ωε
i=1,2
(3.47)
(3.48)
XZ
∂ z̄i 0
(x , M ) Ψi,−
∆
εκ
ε · τε
∂x
−
3
i=1,2 Ω
XZ
∂ z̄i 0
3/2
∆
−2εκ
(x , M ) Ψi,−
·
τ
kτε k(L2 (Ω− ))3 ,
ε ≤ Cε
ε
∂x
−
3
Ω
i=1,2
Z X
∂
z̄
i
0
i,+ 3/2
(x
,
M
)
∇τ
·
Ψ
k∇τε k L2 Ω+ 9
−2εκ
∇
ε
ε ≤ Cε
( ( ε ))
+
∂x
3
Ωε
i=1,2
and
(3.49)
Z X
∂
z̄
i
3/2
∇
(x0 , M ) ∇τε · Ψi,−
k∇τε k(L2 (Ω− ))9 .
−2εκ
ε ≤ Cε
∂x
−
3
Ω
i=1,2
By the Cauchy-Schwarz inequality, we also have
Z
≤ Ckȳε k 2 + 3 kτε k 2 + 3
(3.50)
ȳ
τ
ε
ε
+
(L (Ωε ))
(L (Ωε ))
Ωε
and
(3.51)
Z
(ȳε − ȳ) τε ≤ Ckȳε − ȳk(L2 (Ω− ))3 kτε k(L2 (Ω− ))3 .
−
Ω
18
Notice that Ω+
ε consists of ε-strips of fixed height. Applying Poincaré inequality in each
strip, by summing up, we have
kτε k
(3.52)
3
(L2 (Ω+ε ))
≤ Cεk∇τε k L2 Ω+ 9 .
( ( ε ))
Considering yε in each strip and using Poincaré’s inequality, we obtain
εkyε k
(3.53)
3
(L2 (Ω+ε ))
≤ Cε2 .
In other words, the Poincaré constant is of order ε (see [?], [?]). Combining (3.45)-(3.53),
we get
i
h
3/2
(3.54)
,
k∇τε k(L2 (Ωε ))9 ≤ C kȳε − ȳk(L2 (Ω− ))3 + ε
which, by Poincaré inequality, provides that
(3.55)
kτε k(H 1 (Ωε ))3 ≤ C ε3/2 + kȳε − ȳk(L2 (Ω− ))3 ,
where C a positive appropriate constant independent of ε.
3
For the domain Ω− , we now use a test function in the system (3.44) as φε ∈ (H01 (Ω− ))
satisfying such that ∇ · φε = µε in Ω− and kφε k(H 1 (Ω− ))3 ≤ Ckµε kL2 (Ω− ) where C > 0 is a
constant independent of ε, we get
XZ
∂ z̄i 0
∆
εκ
(x , M ) Ψi,−
ε · φε
∂x
−
3
Ω
i=1,2
XZ
∂ z̄i 0
(x , M ) Ψi,−
∆
−2εκ
ε · φε
∂x3
Ω−
2
i=1,2
(3.56)
kµε kL2 (Ω− ) =
X Z ∂ z̄i
0
(x , M ) ∇φε · Ψi,−
−2εκ
∇
ε
∂x
−
3
i=1,2 Ω
Z
Z
∇τε · ∇φε +
(ȳε − ȳ) · φε .
−κ
Ω−
Ω−
Using the regularity of z̄ mentioned in (3.31), the Cauchy-Schwarz inequality and Proposition
3.4, one can easily prove that
XZ
∂ z̄i 0
(3.57) εκ
∆
(x , M ) Ψi,−
ε · φε
∂x
−
3
Ω
i=1,2
XZ
∂ z̄i 0
3/2
−2εκ
∆
(x , M ) Ψi,−
·
φ
kφε k(L2 (Ω− ))3 ,
ε ≤ Cε
ε
∂x
3
Ω−
i=1,2
and
(3.58)
Z X
∂
z̄
i
3/2
∇
(x0 , M ) ∇φε · Ψi,−
k∇φε k(L2 (Ω− ))9 .
−2εκ
ε ≤ Cε
∂x
−
3
Ω
i=1,2
With the Cauchy-Schwarz inequality, we also have
Z
−κ
≤ Ck∇τε k 2 − 9 k∇φε k 2 − 9
(3.59)
∇τ
·
∇φ
ε
ε
(L (Ω ))
(L (Ω ))
−
Ω
19
and
Z
(3.60)
(ȳε − ȳ) φε ≤ Ckȳε − ȳk(L2 (Ω− ))3 kφε k(L2 (Ω− ))3 .
−
Ω
Combining (3.54), (3.56), and (3.60), we get our desired result
h
i
3/2
(3.61)
kµε kL2 (Ωε ) ≤ C kȳε − ȳk(L2 (Ω− ))3 + ε
,
where again C a positive appropriate constant independent of ε.
We will borrow the following proposition from [?].
Proposition 3.9. Assume that the regularity assumption (3.27) holds true. Let ϑε , qε be
the functions defined in (3.43), and let ϑ̃, q̃ be defined in (3.41). Then, there exists a positive
constant C, independent of ε, such that
kϑε − ϑ̃k(H 1 (Ωε ))3 +
√
εkqε − q̃kL2 (Ω− ) ≤ C,
for ε small enough.
Proof of Theorem 3.6. Notice that
(
˜
z̄ε − z̄ − εϑ̃ − εξε = τε + ε ϑε − ϑ̃ in Ωε ,
(3.62)
q̄ε − q̄ − εq − θε− = µε + ε (qε − q) in Ω− .
With Propositions 3.8 and 3.9, for ε small enough, we can prove that
kz̄ε − z̄˜ − εϑ̃ − εξε k 1
3
3 ≤ C1
,
ε
+
kȳ
−
ȳk
ε
(L2 (Ω− ))
(H (Ωε ))
√
(3.63)
kq̄ε − q̄ − εq − θε− kL2 (Ω− ) ≤ C2
ε + kȳε − ȳk(L2 (Ω− ))3 ,
where C1 , C2 are positive constants, independent of ε. But
kz̄ε − εξε+ k
(3.64)
3
(H 1 (Ω+ε ))
+ kz̄ε − z̄ − εξε− k(H 1 (Ω− ))3
≤ kz̄ε − εξε+ k H 1 Ω+ 3 + kz̄ε − z̄ − εϑ − εξε− k(H 1 (Ω− ))3 + kεϑk(H 1 (Ω− ))3
( ( ε ))
= kz̄ε − z̄˜ − εϑ̃ − εξε k(H 1 (Ωε ))3 + εkϑk(H 1 (Ω− ))3
and
kq̄ε − q̄kL2 (Ω− )
(3.65)
≤ kq̄ε − q̄ − εq − θε− kL2 (Ω− ) + kεq + θε− kL2 (Ω− )
= kq̄ε − q̄ − εq − θε− kL2 (Ω− ) + εkqkL2 (Ω− ) + kθε− kL2 (Ω− ) .
√
Again notice that kθε− kL2 (Ω− ) is of order ε. Consequently, the proof of the theorem follows
immediately from (3.63), (3.64) and (3.65).
20
To derive similar estimates for the optimal state variable ȳε and the corresponding pressure
X ∂ ȳi
(x0 , M )β i , for x0 ∈ A,
p̄ε of optimal control problem (P1,ε ), we need to define B̂(x0 ) =
∂x3
i=1,2
where β i is same as in (3.26). Let us denote the function ξˆε , defined in Ωε by
0
X ∂ ȳi
x x3 − M
0
i,+
+
ˆ
(x , M )Ψ
,
in Ω+
ε,
ξε (x) =
∂x
ε
ε
3
i=1,2
0
(3.66)
ξˆε (x) =
X ∂ ȳi
x
x
−
M
3
0
i,−
−
ˆ
(x , M )Ψ
,
− B̂ in Ω− ,
ξε (x) =
∂x3
ε
ε
i=1,2
where ȳε is the optimal state variable corresponding to the optimal control problem (P1 ),
and where, for i=1,2, (Ψi,+ ) and (Ψi,− ) are defined as the solution to problem (3.25). Finally,
with the same type of proof as done for Theorem 3.6, we have the following theorem.
Theorem 3.10. Suppose that the regularity assumption (3.27) holds true. Let ȳε be the
optimal state variable and p̄ε be the corresponding pressure for the optimal control problem
(P1,ε ). Again let ȳ be the optimal state and p̄ be the corresponding pressure for the limit
optimal control problem (P1 ). Then, there exists positive constants C1 , C2 , independent of
ε, such that
kȳε − εξˆε+ k(H 1 (Ωε ))3 + kȳε − ȳ − εξˆε− k(H 1 (Ωε ))3 ≤ C1 ε + kz̄ε − z̄k(L2 (ω))3 ,
and
kp̄ε − p̄kL2 (Ω− ) ≤ C2
√
ε + kz̄ε − z̄k(L2 (ω))3 ,
for ε small enough, where ξˆε is the function defined in (3.66).
4
Dirichlet Cost functional
In this section, we will focus on the minimization problem (P2,ε ) which is regarding the
optimality of Dirichlet cost functional. We will firstly see the optimality condition as well as
optimality system corresponding to (P2,ε ). After that, with the help of appropriate estimates
we will observe the asymptotic behavior of the optimal solution, co-state, adjoint pressure
and optimal control of the problem (P2,ε ). We will conclude this section by stating results
related to asymptotic approximation.
For each ε ↓ 0, the minimization problem (P2,ε ) has a unique minimizer ȳε , θ̄ε ∈
3
3
1
Hper
(Ωε ) × L2per (ω) . The corresponding pressure in the Stokes’ system (2.1) is de
noted by p̄ε , and we will say that ȳε , p̄ε , θ̄ε is the optimal solution of (P2,ε ). Further, it can
be characterized using the adjoint state (co-state) z̄ε , where z̄ε , along with adjoint pressure
q̄ε , solves the adjoint problem
−κ∆z̄ε + ∇q̄ε = −∆ (ȳε − yd ) in Ωε ,
∇ · z̄ε = 0, in Ωε ,
z̄ε = 0, on γε ∪ Γb ,
(4.1)
R
q̄ = 0,
Ω− ε
(z̄ε , ∇q̄ε ) is Γs − periodic.
21
As in the L2 -cost functional case, we have the following optimality conditions for (P2,ε ).
3
Theorem 4.1. Let f belong to L2per (Ω) and let ȳε , p̄ε , θ̄ε be the optimal solution of
3
1
(P2,ε ). Let (z̄ε , q̄ε ) ∈ Hper
(Ωε ) × L2per (Ωε ) be the solution of (4.1). Then the optimal
control is given by
1
θ̄ε = − z̄ε χω .
β
3
3
1
1
(Ωε ) and (p̂ε , q̂ε ) ∈
(Ωε ) × Hper
Conversely, assume that the pairs (ŷε , ẑε ) ∈ Hper
L2per (Ωε ) × L2per (Ωε ) solve the optimality system
(4.2)
1
−κ∆ŷε + ∇p̂ε = f − ẑε χω in Ωε ,
β
∇
·
ŷ
=
0
in
Ω
,
ε
ε
ŷε = 0 on γε , ŷε = u on Γb ,
R
− p̂ε = 0,
Ω
(ŷε , ∇p̂ε ) is Γs − periodic.
(4.3)
−κ∆ẑε + ∇q̂ε = −∆ (ŷε − yd ) in Ωε ,
∇ · ẑε = 0 in Ωε ,
ẑε = 0 on γε ∪ Γb ,
R
q̂ = 0.
Ω− ε
(ẑε , ∇q̂ε ) is Γs − periodic.
1
Then, the triplet ŷε , p̂ε , − ẑε χω is the optimal solution to (P2,ε ).
β
Following a procedure similar to that in subsection 3.3, we have following estimate
(4.4)
kȳε k(H 1 (Ωε ))3 + kp̄ε kL2 (Ω− ) + kz̄ε k(H 1 (Ωε ))3 + kθ̄ε k(H 1 (ω))3 + kq̄ε kL2 (Ω− ) ≤ C,
where C > 0 is independent of ε. As for Theorem 3.3, we can prove the following theorem.
Theorem 4.2. Let ȳε , p̄ε , θ̄ε be the optimal solution of (P2,ε ) then
ȳ˜ε → ȳ˜
p̄ε → p̄
θ̄ε → θ̄
z̄˜ε → z̄˜
q̄ε → q̄
3
1
strongly in Hper
(Ω) ,
strongly in L2per (Ω− ) ,
3
1
strongly in Hper
(ω) ,
3
1
strongly in Hper
(Ω) ,
strongly in L2per (Ω− )
where
ȳ˜ =
0 in Ω+ ,
ȳ in Ω− ,
z̄˜ =
22
0 in Ω+ ,
z̄ in Ω− ,
3
1
ȳ, z̄ ∈ Hper
(Ω− ) , along with p̄, q̄ ∈ L2per (Ω− ), solves the system
1
−κ∆ȳ + ∇p = f − z̄χω in Ω− ,
β
−
∇
·
ȳ
=
0
in
Ω
,
(4.5)
ȳ = 0 on Γu , ȳ = u, on Γb ,
R
Ω− p̄ = 0,
(ȳ, ∇p̄) is Γs − periodic,
−κ∆z̄ + ∇q̄ = −∆ (ȳ − yd ) in Ω− ,
∇ · z̄ = 0 in Ω− ,
z̄ = 0 on Γu ∪ Γb ,
R
Ω− q̄ = 0,
(z̄, ∇q̄) is Γs − periodic,
(4.6)
1
and θ̄ = − z̄χω . Moreover
β
J2,ε ȳε , θ̄ε −→ J2 ȳ, θ̄
when ε −→ 0,
where
(4.7)
1
J2 (y, θ) =
2
Z
β
|∇ (y − yd )| +
2
Ω−
2
Z
|θ|2 .
ω
If we consider the minimization problem for cost functional J2 as
3
(P2 )
inf{J2 (y, θ) | θ ∈ L2per (ω) , (y, p, θ) obeys (3.4)},
3
3
1
1
(ω) is
then by our next theorem, the above mentioned pair ȳ, θ̄ ∈ Hper
(Ω− ) × Hper
the unique solution of (P2 ).
Theorem 4.3. Let f ∈ L2per (Ω) and ȳ, p̄, θ̄ be the optimal solution of (P2 ). Let (z̄, q̄) ∈
3
1
Hper
(Ω− ) × L2per (Ω− ) solves (4.6), then the optimal control is given by
1
θ̄ = − z̄χω .
β
3
3
1
1
Conversely, assume that the pairs (ŷ, ẑ) ∈ Hper
(Ω− ) × Hper
(Ω− ) and (p̂, q̂) ∈ L2per (Ω− )×
L2per (Ω− ) solve the optimality system
1
−κ∆ŷ + ∇p̂ = f − ẑχω in Ωε ,
β
−
∇
·
ŷ
=
0
in
Ω
,
(4.8)
ŷ = 0 on Γu , ŷ = u on Γb ,
R
p̂ = 0,
Ω−
(ŷ, ∇p̂) is Γs − periodic
23
and
−κ∆ẑ + ∇q̂ = −∆ (ŷ − yd ) in Ω− ,
∇ · ẑ = 0, in Ω− ,
ẑ = 0 on Γu ∪ Γb ,
(4.9)
R
q̂ = 0.
Ω−
(ẑ, ∇q̂) is Γs − periodic
1
Then, the triplet ŷ, p̂, − ẑχω is the optimal solution to (P2 ).
β
X ∂ ȳi
Define B̌(x0 ) =
(x0 , M )β i , for x0 ∈ A , where β i is defined in (3.26), and let us
∂x
3
i=1,2
ˇ
denote by ξε the function defined in Ωε by
(4.10)
0
X ∂ ȳi
x x3 − M
0
i,+
+
ˇ
,
in Ω+
(x , M )Ψ
ε,
ξε (x) =
∂x
ε
ε
3
i=1,2
0
ξˇε (x) =
X ∂ ȳi
x
−
M
x
3
0
i,−
−
ˇ
,
(x , M )Ψ
− B̌ in Ω− ,
ξε (x) =
∂x3
ε
ε
i=1,2
where ȳ is the optimal state variable corresponding to the optimal control problem (P2 ) and
where, for i = 1, 2, (Ψi,+ ) and (Ψi,− ) are the solution to problem (3.25). We will have the
following theorem, whose proof can be derived as in the case of the L2 -cost functional.
Theorem 4.4. Suppose that the regularity assumption (3.27) holds true. Let ȳε be the
optimal state variable of optimal control problem (P2,ε ), and p̄ε be the corresponding pressure.
Again let ȳ be of optimal control problem (P2 ), and let p̄ be the corresponding pressure. Then,
for ε small enough, there exists positive constants C1 , C2 , independent of ε, such that
+
−
ˇ
ˇ
kȳε − εξε k H 1 Ω+ 3 + kȳε − ȳ − εξε k(H 1 (Ω− ))3 ≤ C1 ε + kz̄ε − z̄k(L2 (ω))3 ,
( ( ε ))
and
kp̄ε − p̄kL2 (Ω− ) ≤ C2
√
ε + kz̄ε − z̄k(L2 (ω))3 ,
for εsmall enough, where ξˇε is defined in (4.10).
X ∂ z̄i
Define B̆(x0 ) =
(x0 , M )β i , for x0 ∈ A, and let us denote by ξ˘ε , the function
∂x
3
i=1,2
(4.11)
0
X ∂ z̄i
x
x
−
M
3
0
i,+
˘+
(x , M )Ψ
,
in Ω+
ε,
ξε (x) =
∂x3
ε
ε
i=1,2
0
ξ˘ε (x) =
X ∂ z̄i
x x3 − M
0
i,−
−
˘
(x , M )Ψ
,
− B̆ in Ω− ,
ξε (x) =
∂x3
ε
ε
i=1,2
where z̄ is the co-state variable corresponding to the optimal control problem (P2 ), and
where, for i = 1, 2, (Ψi,+ ) and (Ψi,− ) are the solutions to problem (3.25). As in the case of
the L2 -cost functional, we have the following theorem.
24
Theorem 4.5. Suppose that the regularity assumption (3.27) holds true. Let z̄ε be the costate variable and q̄ε the corresponding pressure for the optimal control problem (P2,ε ). Again
let z̄ be the co-state variable and q̄ the corresponding pressure for the optimal control problem
(P2 ). Then there exists positive constants C1 , C2 , independent of ε, such that
kz̄ε − εξ˘ε+ k H 1 Ω+ 3 + kz̄ε − z̄ − εξ˘ε− k(H 1 (Ω− ))3 ≤ C1 ε + kȳε − ȳk(H 1 (Ω− ))3 ,
( ( ε ))
and
kp̄ε − p̄kL2 (Ω− ) ≤ C2
√
ε + kȳε − ȳk(H 1 (Ω− ))3 ,
for ε small enough, where ξ˘ε is defined in (4.11).
Acknowledgement: The first two authors would like to thank UGC for the support to
the Center for Advanced Studies (CAS), Department of Mathematics, IISc.
25