...")
From: AIPS 1994 Proceedings. Copyright © 1994, AAAI (www.aaai.org). All rights reserved.
Design Tradeoffs in Partial Order(Plan Space) Planning
Subbarao Kambhampati*
Depati~iie~t of Computer Science and Engineering
Arizona State University, Tempe, AZ 85287-5406
Abstract
Despitethe IonBhistoryof classicalplmming,
therehas beenverylittle
compsrative
analysisof the performance
tradeoffsofferedbythe multitude
of existin8 planningalSodthms.
Thisis partly dueto the many
different
vocabularies
withinwhichplanningalgorithmsare usuallyexpressed.In
this paperI providea generalized
algorithmfor refinemant
planning,and
dhow
that plannersthat searchin the spaceof (partial) plansare specific
instantisfiom
of this al$orithm.
Thedifferontdesignchoicesin partial order
plannin
to the differantwaysof instantistin8 the Beneralized
8 correspond
alsorithm.I will analyzehowthese choicesaffect the search-space
slz¢
andrefmemant
cosl of the resultant planner.Finally, I wW
conceutrete
oft twospecificdemsn
choices,viz,, protection
strate$iesandtractability
refinements,anddevelopsomehypotheses
regardingthe effect of these
choicesonthe perfocnn~nce
onpractical problems.
I will supportthese
hypotheses
witha focussedempiricalstudy.
I Introduction
Theidea of generatingplans by searchingin the spaceof (partially
orderedor totally ordered)plans has beenaroundfor almosttwenty
years, andhas receiveda lot of formalizationin the past fewyears.
Muchof this formalizationhas howeverbeenlimited to providing
semanticsfor plans and actions, and provingsoundnessand completenessof planningalgorithms.Therehas beenverylittle effort
directed towardscomparativeanalysis of the pedormance
tradeoffs
offered by the multitude of plan-spaceplanningalgorithms.1 An
importantreasonfor this state of affairs is the seamingly
differentvocabelarles and~ frameworks within which manyof the ~s
are usuaUyexpressed.
The primary purposeof this paper is to explicate the design
choicesin plan-spaceplannersand understandthe tradeoffs offered
by them. Tothis end, I providea generalizedrefinementplanning
algorithm, Refine-Pla.r~ describe the various waysin whichits
individual steps can be instantiated; and explain howthe various
instantiations coverthe existing plan-spaceplanners. I will then
developmodelsfor analyzingthe effect of different designchoices,
i.e., the diff~ent waysof instantiating, l~£ine-Pian, on the
search spacesize and refinementcost. FinaUy,I will demonstrate
the practicalutility of this analysisbyusingit to predictthe relative
performance
differentials causedbythe variousdesignchoices.I will
evaluate these predictions with the help of empiricalcomparisons
betweenfive normalizedinstantiations of Re£ine-Pl~n.
Thepaperis organizedas follows: Section2 discussesa unified
representationand semanticsfor partial plans. Section3 presents
*Thisresearchis supported
in part byNatinnalScience
Foundation
under
grant IRI-92|0997,
and ARPA/Rome
Laboratory
planninginitiative under
grant F30f~93-C-0639.
Specialthanksto DavidMcAllesterand Bulusu
GopiKumer
for constructive
suggestions
in the initial stages
of this work,
andDanWeld,Crm
for helpful
S Knoblock,Qian
8 Yan8and Eriz Ja~mpin
discussions.
ITheworkof Bm’reR
and Weld[I] as weUas Mintonat. aL[15] are
certainlystepsin therightdirection.
However.
theydonottell thefull story
since the comparison
therewasbctwean
a specificpartial orderandtotal
orderplanner.Thecomparison
between
differentpartial orderplannersitself
is ~ll largelyunexplored.
92
REVIEWED PAPERS
the generalizedre~tementplanningalgorithmanddescribesthe different waysof instantiating its cemponents.
Section4 describesthe
effect of different instantiationchoicesonthe searchspacesize and
refinementcost of the resulting planningalgorithm.Section5 considers the effect of variousdesignchoicesonpractical performance.
Section6 presentsthe conclusions.
2 Preliminaries
Agroundoperatorsequence
S : o i, o2, ¯ ¯ ¯ o. is said to be a solution
to a planningproblem
[Z, ~], whereZ is the init~ state of the world,
and ~ is the goal expression,if S can be executedstarting from~.
andthe resultingstate will satisfy the goalexpression.Asolution5
is said to be minimalif no operatorsequenceobtainedby removing
someoperatorsfromS can also be a solution. Aplanningstrategy
is said to be completeif it can find all the minimalsolutionsfor
any givenproblem.Wewill be assumingthat the domainoperators
are describedin the ADL
[17] representationwithPreconditionand
Effect formulas.Thepreconditionand effect formulasare functionfree ficst order predicate logic sentencesinvolvingconjunction,
negationandquantification.Thesubsetof this representationwhere
bothformulascan be representedas conjunctionsof function-frea
first order literals, andaUthe variableshaveinf’mitedomains,is
ca/led the TWEAK
representation(c.f. [2, 11]). Weshall restrict our
discussion to TWEAK
representation whereverpossible to keepthe
expositionsimple.
Plan space planners search in the space ofpartial plans. In
[8, 6]. I arguethat in refinementplanning,partial plans are best
seen as consu-aint sets that implicitly represent aUthe ground
operatorsequences
(called candidates)that are consistentwiththose
constraints. Thegeal of refinementplanningis then to split these
caadidatesets until a solutioncandidatecanbe pickedupin bounded
time. The following 5-tuple provides a uniformrepresentation
for partial plans that is applicableacrossall refinementplanners:
(2", O, B, ST,£) where:T is the set of actions(step-names)in
plan; T contains two distinguished step namesto and t,. ST is
a symboltable, whichmapsstep namesto domainoperators. The
special step to is alwaysmappedto the dummy
operator start,
and similarly t, is always mappedto finish.
The effects of
start
and the preconditionsof finish
correspond,respectively.
to the initial state and the desired goals (of attainment)of the
planningproblem.O is a partial orderingrelation over T. B is
a set of codesignation(binding)and non-codeslgnatlon
(prohibited
bindings)constraintsonthe variablesappearingin the preconditions
andpost-conditions
of the operators.£ is a set ofau:,ilinryconstraints
(see helow).
Agroundoperatorsequencesis consistentwiththe step, ordering
andbindingconstraintsof the plan 77as tongas it containsall the
stepsof the partial plan. in an orderandinstantiationconsistentwith
OandB. For5 to be a candidateof 77. it shouldalso satisfythe set of
auxiliaryconstraintsspecifiedby £.2 Animportanttype of anxilisry
2F.ora moteformaltreatmentof the semantics
of candidatesets and
the auxiliaryconstraints,see[8]. There,I differentiatebetween
twotypes
of auxiliaryconstraints-auxiliarycandidate
constraints,which
needto be
From: AIPS 1994 Proceedings. Copyright © 1994, AAAI (www.aaai.org). All rights reserved.
¢Omlra/ntis an interval preservation constraint (]PC), which
specified as.a 3-mple:(:, p, J’). A groundoperator sequenceissaid
to sat~fy an IPC (e,p,e’) of a plan ~,if there exists a mapping
A4betweenthe steps of. ~ and the elements of S, such that .A4
is consistent with ST and every operator of S that comesbetwe~
A4[J] and.A,/[8’] W--~ervesp.
Toilinstrate the abovedcfin/fions, consider the partial plan 7>8/yenby thecous~’aintset:
~m :
{tl-*Oh J2-~02,tO -*start,
|m-*fin},
/ {~’"’""’}’{~’<’""-<t2,t,~,.}.|,
{0,,p,
t2),
02,
g,t®)}
>
AlgorithmRefine-Plan(Z~)/*Returns refinements of "P */
Parameters: (0 sol" Solution constructor function. (~0
piok-preo: d~ Iotlfine for picking the goal to be establishexL
(ii~ interacts?:
the routes uNd by pre-ords~g to check if
a paEof stepsin~fa~.
(i~)conflict-resolve:
theroutine
whichresolves conflicts with an~l|.ry candidate consists.
O. Termination Check: If sol(~, O)returns a solution candidate,, return it,andterminate. Ifitreturns *fail*, faiL
Otbe~ continue.
1. Goal Selection: Using the pick-~rec functinfl, pick a goal
(G, a) (where C a pre condition of step ,) ~ ~Io
establish. Nota bacl~rackpoint.
Let S be the ~p’oundoperator sequanceo~a2.S is a candidate of
~a becauseit contains all the steps of 7~=(under the mappingST)
2A. Goal Estab~hment:Non~e__te~’ministicallyselect a newor
intheorder
consistent with theordering coustrainu
of7~,,.
Further,
exiting estsbUsh& step ~’ for (C,*). Introduce enough
since there are no steps between
s, and02, or o2 andthe endof
ordsring and.binding constraints, and ~ preco~didons
8,thetwointerval
preservation conslraints are also sathfied.
By
to the pkn such that (i) ~’precedes
¯ (i0 ¯’willhave an
similar arguments,the groundoperatm"sequenceotoso2o4~ also a
effect G. and (iii) Cwill persist until ¯ (Le.. ~ is preserved
candJda~as long
as o3 preserves(does
notdelete)
p ando4 preserves
by all thesteps intervening between¯’and #). Back, track
q.
point; all establishmentpossibilities needto be considered.
A groundiiaearizafion (eka completion) of a partml plan
2.2. Book Keeping: (Optimal) Addanyil|.ry c&lstrainm noting
P :(T, O, H, ST, £) is a fully instsmiated total ordsmgof the
steps of ~ that is conmtentwith O(i.e., a topologica/sort) andB.
theastsblishment
decisions, toensure
that
these
decisions
are
protected
byanylater
refinements.
Thisinturnreduces
the
ground.l]ncedT~on
of a plan is said to be a safe groundl/nearizaredundancyin the search space. Theprotection strate~,s may
fion if and only ff thegmundoperator sequence ~responding to
be oneof goal protection, interval protection andcontributor
it (mo4~iomappingST)satisfies all the au:ril|.ry constraints of the
plan. For the e~unpleplan ~’s discussedabove,to|z|2t, is the o.ly
protect~n(see text). The auxiliary cons~aintsmaybe sos of
lp’oundlinesdzafi~, and it is also a safe groundlin~7.z~en (since
point truth censumtsor Lqterval preservatien constraints.
sloe satisfies the anxu~.rycoustraints of ~m).
3. Tractability Refinements:(Optional)
These
refinements help
Apartial plan is said to bei.uennnlnteot
if its Cavd~dnte
set is empty
in makingtheplan handling and consismncycheck u~able.
(Le., there exists no ~undoperator sequancethat i~ coasi~tent with
Useeither one or both:
the consu’aintsof the plan). It can be shown[8] that a partial plan
is consistent if it has at least onesafegroundlineariT~on, and
3,a.Pre-Ordering:Impose additionalorderm~ between evinconsistent oth~wise.
ery pair of steps of the partial plan that possiblyinteract
accerding to.the static mmacfionme~cinteracts?.
3 Ageneralized algorithmfor Partial-order PlanBacktrack point; all ~nteract~on orderings need to be
ning
considered.
The ~ Refine-Planin Pi~n~ I describes a generalized
3.b. ~oaffict Resolution: Add orderin~s, bindings and/or
refmemmt-plenning
algorithm, thespecific
instantiatiens of which
sece~dsry(preservatino)precouditicas to resolve co.3covermostof the existing partial-order (plan-space) planners.
fliers betweenthe stops of the plan, andthe plan’s anxilkry can41~con~aints. Beet:rack point; all possible
Given a pl,nning problem [/,G], where l is the init~s~
spacificafi~ and G is a set of goals (ofattaitunent), theplanning
conflict
resolm~on
constraints
need
tobeconsidered.
process is i-i*~--"
Uedbyl-vokmg
Reflne-Plan
withthenullpartial
4,Comisteney
Check:
(Opfioeal)
Ifthepartial
planis inconplan Po whe~
sistent
(i.e.,
hasnosafe
ground
linearL~sti_a~s),
fail.
Else,
cominue.
~0: ({~o,t.},{~ ~ %.},|, {is-* start,
|.-~fin),
5. Recur~ve Invocation: Recursively invoke Refine-plan
Table I du~ many weU4mown p~.dng a~n~hms as
on the refined plan.
in~anfiafioa8
of Refi~-Plan.
Ill th8 foUowm~
I win br~fly
d~cuu
th~ind~|~_~-_;
s~psRefine-Pi an.
1: A generalizedrefinement algorithmfor plan-spaceplanCoal Sekclion and Establishment:Theprimary
refinement operaning
tion in p~,--ing is the so-calledestablishment
operation. It selectsa
precmditiun
(6’, .)oftheplan (whereC is a prece~diti~of a step
The~ategy usedto sel~ the parti~lat prec~dition (G, s) to
=), and refines (i.e., addsconsmdnts
to) the partial plan such that
emblishe&(caned~ seJoctiun strategy) can be arb~ary, d~and
~ steps act as comr~um~sof G to ¯ in d/fferent refinements.
driven (e.g. select a goal only when~ is not nece~urilytrue in all
Pednanlt [17] provides a generaltheory of establkhment
refinement
groundlinesrizatinas of theenrr~t partial plan), of can dependon
for plans env*-~-~$
ac~swith
CO,drilling1 and quantified effects.
someranking based on precoudifimabslractin~ [19]. The cost of
SyntsetiP~lly, M~ro.¢lnemefltcorl~ponds
to adding differexlt sots
using each type of goal selcctiou strategy dependson the type of
of newstep, m~ku’ingand binding ceoso’aints (as well as .dd~al
partial plans maintainedby the planner (see Table 1).
secondary precovd~,Jnns, in thecaseof ADLactiens [17]) to the Protecting establishments through bookkeeping:It is possibleto
p~-ent phm.
limit Refine-Plan
tOestsblkhmeflt reflOenlents 8le~e and still
get a sound and complete planner. Chapman’sTweak[2] is such
mfisfled by evay emdidate of the p~, and amWiarysoS,t~n ~ts
a planne~.However,such a phumer
is not guaranteedto respect
whichneed to be mtidedmzlyby those candida~of the pkn that aru
mlutions vo ~e pltnn~n~probkm.To keep ~hinpsimple, I amummin$ its previous establishraent decisionswhile m-~ingnewones, and
thus maydo a lot of redundantworkin the worst case. Thebookthat all the auxilim
~ au~,-’ycandidate
constrain=.
7 emstralms
=An~amexcep~o~is the hierarchical task reducfioll plmmers,such
keeping step attempts to reduce this redundancybyposting au~m,ry
as SHE[7.2], O-Pkn[3]. However,~ee [7] far ¯ dlseusshmof how cemtraints mthe partial plan to protect the eb~ablkhmentS.
~ J.u~-P"._a~
e~mbe exteudedto coverthue pLmmm’s.
The protecti~ serateg~ usedby classical panmlorder planners
KAMBHAMPATI
()3
From: AIPS 1994 Proceedings. Copyright © 1994, AAAI (www.aaai.org). All rights reserved.
1[ Planner
Tweak[2]
UA[15]
Nonlin [21]
TOCL[I]
Pede~e~al
[13]
SNLP[14]
UCPOP[18]
MP, MP-I [9]
SNLP-MTC
McNONLIN-MTC
H Soto. Constructor [
MTC-hasedO(n’)
4)
MTC-basedO(~
MTC(Q&A) based
Proteaion based O(I)
Protection based O(I)
Protection based
O(I)
Protection based
MTCbased O(n ")
4) based O(n
MTC
Goal Seleclion [
MTC-based O(n4)
4)
3~’C-based O(n
Arb~ary O(Z)
Atbiffary O(1)
Arbitrary O(I)
Arbitrary
O(I)
Arbitrary
MTCbased 4)
O(n
MTCbased O(n’)
Book-keeping
I Tractahility Refinemenm[]
None
None
NOlle
Unambiguousordering
Interval & Goal Protection via Q&A Conflict Resolution
Contributorprotectu)n
Total ordering
Interval Protection
Total ordering
Contributer protection
Conflict resolution
(Multi)
contributor
protection
Contributorprotection
Contributorprotection
Interval protection
I
Conflia resolution
UnambiguousOrdering
omflint reso~fion
conflict resolution
Table 1: Characterization of existing plmnnersas insumtiations of Re£J.ne-PJ.an. Thelast three planners have not been described in the
literature previously. Theyare used in Semion5 to facilitate normalizedcomparisons.
cemein two mainvarieties: interval protection (aka causal link
binding consistency).
protection, or protection intorvais), endcontributor protection (aka
Solution Constructor function: The jobof a solution-cmstructor
exhaustive causallink protection [9]). Theycan both be represented
functionis to lookfor endremm
a solutioncandidatethat is consistent
in termsof the interval preservationconstraints.
with the ~t consu’almsof the partial plan.7 Existi-g solution
Supposethe plannerjust establisheda conditinac at step a withthe
constructors fan into two broad categories - (i) those whichuse
help of the effects of the step ,’. For planners using iot~val pr~
the modaltruth er~edon(M’rc) to check that all the safe ground
(e.g.. PEDESTAL
[13]). the book-keepingconstraint requires that
linearizations correspondtosointions and (ii) thosethat dependupon
no candld~teofthepartial plan can havep deleted betweenoperators
interval endconaibutorprotection strategies and conflict resolution
c~msponding
to a’ end a. It can thus be modeledinterms of interval
(see below)to guarenteethat all goals are estabfishedend that none
preservati(m constraint (#’, p, a). Finally, for bookkeeping based
of the establishmentsare violated (we call these protection based
on contributor protection, the amdllJry constraint requires that no
constructms),
candidateof the partial plan can havep either __,~Me__d
or deleted
betweonoperators corresponding to a’ end m.4 This contributor
4 Modelingand Analysis of DesignTradeoffs
protection can be modeledin terms of the twin interval preservation
onnstralnts
(", p, a) and(e’, -’-,p, s
Table 1 characterizes manyof the well knownplen-space pianConsistency Check: The aim of the consistency check is to prone
nmg a~hhms as mstenfinfions of the Refine-Plan ~gorh~n.
inconsisl~nt nodes (i.e.. nodeswith emptycandidate sets) fremthe
Understandingthe performanceu~_deoffs offered by the various
search space, thereby imwovingthe performance of the overall
planners is thus reducedto understandingthe ramifications of inrefinement much.eThe consistency check can be done by ensuring
stantiating the l~fine-Plm~ algorithm in different ways. In
that the partial plan has at least one safe ground ~near~on.This
this Section, I discuss howthese instentiation choices affect the
requires checkingeach groundtinearization ageinst all the auxiliary
searchspacesize endthe refinementcost (the per-invocationcost of
constraints. For general partial orderings with causal-link based
Ref:l.ne-PZan) of the resulting planners.
auxili~ constraints, the consistencycheckis NP-hard[20] even for
I wms~n by developing two c~nplementarymodelsfor the size
TWEAK
action repreeantJ~o~.
of the search space explored by Refine-Plan lu a bread~-first
Pre-ordering and Confl/ct Resolution to aid tractable refinesearch regime. Suppose~d is the da’ ~vel fi~nge of the search ~ee
ment: Both preorderJng end conflict resolution steps aim to make explored by Re££ne-Plan. L~ w. > 0 be the average size of the
~e££ne-PZetntractable by makesthe co~sis~ncy check polyno~jiDdidAt~
se~of the partial plansin the d*s level fringe, endp,t(> I)
mial. In the case of pre-ordering,this aimis achievedby restricting
be the redundancy
factor, i.e.. the averagenumberof partial plans on
the type of partial orderingsin the plan such that consistencywith
the fringe whosecandidatesets contain a given candidatein ~ (see
respect to au~riliAry constraints can be checkedwithout explicitly
Section2). It is easyto senthat I~’~1
x,,~ -- [~c[x Pd(whereI.I is
enumeratingall the groundlinesrizations. Twopossiblepre-ordering
used
to
denote
the
cardina/~y
of
a
set).9
If b is the averagebrenching
techniques are total ordering end unambiguous
ordering [15]. Total
ta
ordering orders everypair of stepsin the plan, while unambiguous factor of the search, then the size of d level fringe is ahogivenby
ordering orders a pak of steps only whentheir pre~udifions end
effects have an overlap (thereby makingit possible that the two
7Notethat mluticoconaructm-functionmayalso rann~a *fail* on a
steps will interact). Bothof themgearentcethat in the refinements 8ivanpatSfialplan.Thedifferencebatwean
this andtheconsistancy
checkis
that the ~ fails only whenthe partial plan has an emptycandidateset,
producedby them,either all groundlincarizations will be safe or
whilethe solutianconsmsctor
canfail as longas the candidateset of the
none will be. Thus, consistency can be checked in polynomial
partial plandoesnot containanymlotiansto the 8ivanproblom.
time by examiningany one ground linesrization. In the case of
S’raesolutiouconstructorsdiscussedaboveare sll conservative
in that
cot, flier resolutimL
the partinl plan is x~fmed(by adding ordering
theyrequirethat all safe 8ronnd
linearizatinn~,
of a pinealplanbe solutions.
andbindingcoaslraints) until eachpossible vinlatiort of the auxiliary
In [8], weshow~lt it is possibleto providepolynomial
k.eagersolution
constralm (called conflict) is individually resolved. This ensures
consm]ctors,whichrandemlycheckk safesround~neerLzafionsof the
that all remaininggroundlinearizafions are safe. Thus,checkingthe
to see if anyof themare solutions.Theseconstructorsare soundand
partialplanconsistencywill amountto checkingfor the existence of phm
complete
andare 8uaranteed
to terminatethe searchbeforethe conservative
ground linearizations (which can be done by checking ordering end
constngtmfimctions.
4See[6] for a coherantreconstructionof the ideas underlying$ml
preU~onsUnUeSiex
SMuifi-contributor
protections, suchas thosedescribedin [9] can be
representedas a disjunctionof IPCa
6"Ihus,fromcompleteness
point of view,consistencycheckis really an
optionalstep.
94
REVIEWED PAPERS
9Althonsh
bothI~:l
andg~tcanbe infinite, byrestrictingourattentionto
minimal
mlutiona,it is possibleto onnsmmt
finite versionsof both. Given
planningproblem
instanceP, let ~,~ be the lansth of the lonses~8round
operatorsequencethat is a minimal
SOlUtion
of P. Wecan nowdefineKto
be the set of aDWound
operatorsequances
of upto Igngthlw,. Similarly.we
canredefinethe candidateset of a partial planto consistof onlythe 8ubuct
of its candidates
that are notlongerthanfro.
From: AIPS 1994 Proceedings. Copyright © 1994, AAAI (www.aaai.org). All rights reserved.
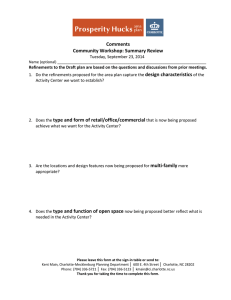
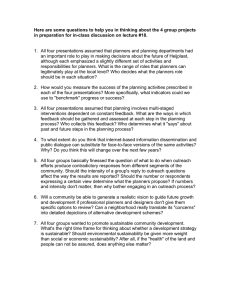
Figure 2: Comparaaveperformance in ART-MD-RD
domain(see text)
stronger consistencychecks tend to be costlier, thereby driving up
the refinement
co~t(in particuhrC,).
Tractability Refinements:The primarymotivation for tractabifity
refinements, whe~erpre-ordering of conflict-resohtion, is to make
the consistency check tractable. They thus primarily reduce the
Theaveragebranchingfactor, b can be split into twocomponents,
b,.
C=componentof refinement cost. In the case of pre-~dering
the establishmentbranchingfactof,andbt the tractability refinement refinements,they also tend to reducethe cost of goal selection and
branchingfactor, such that b = b, x b,. b, endbt cofr~pood,respecenhnion-construction, espe~ally whenthe Latter are based on MTC
tively, to the branchingmadein steps 2 and 3 of the Re£ine-Pl em
(thereby reducingthe C, and C, components)[6]. In terms of search
a!ger~un.
space size. tractability refinementsfurther
refine the plans coming
If C is the average cost per invocation of the Refine-Plan out of the establishment stage, increasing the bt component
of the
algorithm.Andd. is the effective depthof the search,thenthe cost
branching factor. Whileconflict resolution strategies introduce
of the pituning is C x [.F~,I. C itself canbe decemposedinto
three
ofderings betweensteps based both on the static description of the
maincomponents:
C = Co+C~+ C,. where Ce,is the establishment
steps (such as their effeas and preconditions)and the role played
cost, (including the co= of selecting the goal to ~ co). C, is the
themin the current partial plan. the pre-e~leringstrategiesconsider
cost of solution constmetor,and Ceis the cost of consistencycheck. only the static description of the steps. Thus, the h increase
Armedwith this modelof the search space size and refinementcost.
is typically higher for pre-ofdering than fix conflict resointion
weshall nowlook at the effect of the various waysof instandating strategies.
each step of the Refine-Plan
algofithm on the search space size
and the con of refinement.
5 Empirical
Analysis of Performance Tradeoffs
Solution Constructor: Stronger solution constructofs allow the
search to end earlier, reducingthe effective depthof the search, and
In this section. I will. evn_lp~the tlti~ of the tradenHSmodel
thereby the size of the exploredsearchspace. In terms of candidate
developed in the previons se~m in predicting and explaining
space view, stronger solution constructofs lead to larger ~ at the
empirical performance. FromTable 1, we note that two prominent
temdn~fi~fringe. However.at the sametime they increase the cost
dimensions of variation amongexisting planners are the bookkeeping strategies and traetabi]ity refinements they use. In the
ofrefinomentC (specifically the C, factof).
BookKeeping:/~4_4i~r,~of book-keepingtechniquestend to reduce interests of space, weshall restrict our attention to the performance
tradcoffs offered by these dimensionsof varinfion.
the redundancy
factor Pal. In particular, use of contributorprotection
makesthe searchsystemmic, eliminating all the redundancyin the
Animpoftant prerequisite fof. any such comparativeanalysis is
search space and makingpd equalto 1 [14. 6J. This tends to reduce to normalize the e~ of other dimensions .of variation. Our
generalized ~dSct~.mprovides a systematic basis for doing such
the fi’inge size, I.~,d. Boot:keepingconstraints do howevertend to
increase the cost of consistency check. In particular, checkingthe
a nc~uali~mion.In particular, I will con;i4e~_five instances of
consistency of a partial plan containing interval preservatico conRe£1ne-PZem, called SNLP-MTC,UA, SNLP-UA,TWEAK
and
straints is NP-hard even for ground plans in TWEAK
rep~enmt~n McNONLIN-MTC.
which differ only in the book-keeping strate(of. [2oD.
gies and the tractabitity refinements.All these plannersuse the
ConMstencyCheck: As mentionedearlier, the motivation behind
sameM’I~-basedgoal selection strategy, and MTC-based
solution
consistency check is to avoid refining inconsistent plans (or the
constructor function (see Section 3). S~-M~ and S.~p]allS
W;-th
e~npty
candit,
lnte
~). ~g inconsistent plans is a
UAuse contributor protection, while blc~onlin-MTC
uses interval
useless activity andpopulatesthe searchfringe with plans with empty prote~[6, 9]. UAand SNLP-UAuse unambiguous prcordering
candidate sets, driving down~,j. Thesmong~the consistencycheck, strategies (SNLP-UA
uses a stronger notion of interactim which
the s~,,,np-this reduction. In particular, if the planneruses a sound makestwo steps interact evenif they share add list Uterals [6]).
SNLP-MTC
and blc.,’q’OI~R.~i’-MTC
use conflict resolution stratsand completeconsistencycheckthat is capable of identifying every
gies as their tractability refinements.
inconsistent
plan.then the averagecandidateset n,, is guaranteedto
be grM__~than of equal to 1. Combined
with a systematic search,
5.1 Tractability Refinements
this will ~uarantcethat the fringe size of the search will neverbe
~p’eatef than the size of the Candidatespace IX;I. Sucha search is
Promthe discussionin Sectimz
4. wenote that presenceof tractability
called a strong sys~emm~c
search. In termsof the refinement cost.
refinements inaensesh. Specifically. wecan see that fix the
KAMBHAMPATI
95
From: AIPS 1994 Proceedings. Copyright © 1994, AAAI (www.aaai.org). All rights reserved.
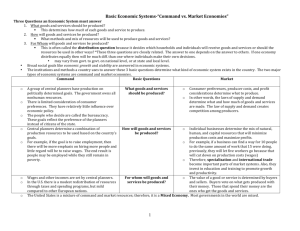
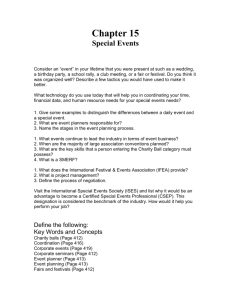
Figure 3: The first two plots compareaveragebranchingfat:ors in ART-MD-RD
experiments.The third plot showsthe effect of misdirection
on protection strategies
LIFO
five planaeni that we are considering, bt(S-NI~-UA)> bt(UA)
bt(SNLP-MTC)
__ b,(M~ONLn~-MTC)
_>b,(TWBAK).
Barring
anyother
interactinas, theincrease in b,should
increase
theaverage
branching factor of the search, and should consequently increase
search space size exponentially. Unle~therefinementcost is also
reducedexpmentiany(whichis not the ease for these five planners,
and is ,,,,It~ly in genexakSection 4), we wouldexpect planners
using
moreeager
tractability
refinements
(Le.,
higher
6,)topedonn
worse thin those using less eager (or no) tractability refinements
under
breadth-~st
search regime.
Toevaluate
thishypothesis,
I compared
thepe~foanance
ofthe
five pt,mners on problems fi’om an ~ donufin called ARTMD-RD
[10], whichis specified as:
A~~,.e,.: l,, he.~ : c7.¥ ~e~
: {I~1./<
~}u {he}for even
.4~~,,’e~: I,, ¥,.d.~: C7,,he~: ,Jill./<~}v{¥}for odd
Theplots in Pigm’e2 showthe performance
of the five planners
on problemsfrom this domain.Bach point in theplot corresponds
to an ave/age over 30randomproblems with thegivennumberof
goals (drawnf~xn {G, ... Os}). Theini~ state is the samefor all
the problems, and contains {11 ... h} + {he}. The plots showthe
performancesfor two different goal ocderings (over andabove the
MTC-based
goal seleotim strategy). In LIFOordering, a goal and
all its subgonls (which are not ~y true according to MTC)
are establishedbefore the next higher level goal is adckessed.In the
FIFOordering, all the top level goals are established before their
subge~sare addressed. All the planners use numberof steps in the
pmial plan as the heuristic.
If the performance depended only on the b, factor, we would
expect to see planners with less eage~traotability refinementsperform better. Wenote that tlthongh our hypothe~holds for
ordering, for LIFOcatering, the observed relative performanceis
exactlythe reverse of whatis predicted by lifts hypotheais.. Whatis
more,the plots of averagebranchingfactors of the five planners in
Figure 3 showthat in LWO
ordering, the overall branchingfluters
are opposedto the pattern of b,.
To tmdm’s~md
this apparent discrepancy, we start by noting
that our hypoth~is ignores poesible secmdaryinteractim8 between
tractability refmemenu
and other parts of the Re £:Lne-PJ.emalgorithm. Onesuch interaction is betweentractability refinementand
establishmentrefinement. Specifically, the sadltUmallineatization
of the plan done at the tractability re~emontstage maysometimes
windup reducing the numberof possible establishment refinements
for the goals consideredin later stages. This could, in turn reduce
b.. Sku:e b = b. x it, the overall effect of tractability refinements
ca the search space thus dependson whetherof not the increase in
96
REVIEWED PAPERS
1-4712"93 II 1.32130"14 II
II
UA
I
Mc~onlin -MTC I
S~LP-MTC I
SNLP-UA
I
~.76 I t.o II 1.°Xl Lo 11
x.o04I -77
x.o07II 1.22]34.77II
1-° I
II 1-°113.s711
1,0 I .STII x.o I 0.ss II
Table 2: Estimates of average redundancy fac~ and average
candidate set size at the termination fringe for 30 random6-goal
problems in ART-MD-RD
domain
b, is accompaniedby any fortuitous decrease in 6o. (A variant of
this type of interaction wasfirst observedby Knoblockand Yangin
their experiments[12].)
The behavior of the five planners in LIFOordering can be
explained in terms of the interSC~fionbetweenbt and be. In the
cnse of LIFOordering, each planner is forced to workon heand
h.f conditionsexplicitly. Theseare high-frequencycondltlorts (c.f.
[10]) in the sensethat themare numysctions that can edd or delete
them. Becauseof this, the branchingfactor at the establishment
refinement is very high for these cmdifions, and becomesthe
dominatingfactor affecting the perfoanance. Phumersusing eager
tractability
refinements
havemetelin~~ plansand thus
offer fewer estabUshment
possibilities than those with less eager
tractability refinements. Thus. TWEAK.
which
doesnot introduce
any traaability
ordesings,
andmaintains a moreunorderedpartial
plan. incurs the fuUeffect of increased b,. while the other four
planners mitigate it through the linearizatim introduced through
trsctabiUty refinement. This explains whythe planners with eager
tractability refinementsperformbetter.
Thesituation reverse,~ (and becomesmore normal) in the FIFO
ordering, whereall the top level goals are fast addressed before
their preconditions. Since G~, l~ goals are workedmfirst, and
the resulting orderingindirectly establishes h /Ihe goals, the high.
frequency conditions sre either
not considered for establishment
explicitly, or are consideredlate in the search. Thus,bo no longer
dominatesthe over all branching factor, and planners with more
eager tractability refinement (and higher b,) pedormwere than
those with less eager tractability refinement,as expected.
52 BonkKeeping/Protecl/on StrateL, ies
I winnowturn to the effect of protectimstrategies en performance.
Promthe discussionin Section4. wenote that the primarypurposeof
the book-keeping
strategies is to reducethe redundancyin the search
space. Table2 showsthe estimates of the averageredundancyfactors
From: AIPS 1994 Proceedings. Copyright © 1994, AAAI (www.aaai.org). All rights reserved.
at the tazzlinatioofz~rlge of the five pbmnen
f0f 300-gOalART-MD- 6 Couclusion
RD problems. :° Mto be expected. 5NZ~-MTC
and SZOAP-UA. The ~ co~ibutim orris paper is ¯ unified £~meworkfor
whichuse couu’ibutor pro~etious, have no redundancy~,1 = 1).
understanding and analyzing the ~ tredeoHs
in partial-oai~
Howeva,fi~n the plo~ mP~ure 2. we~,,~*_- that theFedmr"~-e
profiles in ART-MD-RD
domainare not in ccaaspatdmce with
p~nmng
s~un in Section 3, and showedt~at n~t e~sdngp]anthe redundancyfactors. ]Promthe same plots, we also note that
spice plann~s are instantiatious of this ~n,,, I then devek~.
SNLP-UA,which uses the contributor ixotectim, is ctm= to UA ¯ model for estimating the~mt cost and search space size
than ~’LP-MTCin perfmn~ce~
of Refine-Plan
and discussed how they are affected by the
diffea’emdesign choices. Irmally, I have
dascr~ed
somepreliminary
The lack of dke~ cmelatim between pm~:tiou mategias and
empirical
studies
aimed
atunderstandingtheaffect
oftwo of these
perfix’mance should not be s .u~rising. As shown in [10]. the
redundancyin the search space = expected to affect performance cho~*_-s - ~a~ab~Tre~emonts and protection mateg~s - m the
relative pe~mumce
of dL~efant p|nn,ers. These smd~showthat
only whatthe planneris fcz’cedto ex-miQe
¯ significant pm’tof its
the peffemtance is affecU~ more by the d~mmc~
in Iraaability
space before finding the solution. Thus, we expect that the
refmemeatsthan by the diffefances in pmtectimstrategies. While
~cas in Wotection slra~.Sies
akme wilt affect the ~
thispaper
makes
m important start towards understanding of the
oaly whenthe apparent solution density is low moughmforce the
cemp~afive peffeesumce of par~fl~fder planners, further v~k
plann=msearch a submnfialpstt of its search space.
isstill needed
todevelo9
a pr~__’_,~ive
understandingof which
To evaluate this hypothesis further, I compared TWBAK
and
insumfiatious of ~efine-P~an
willpe~onn
bestinwhichtypes
SNLP-MTC
in a variant of ART-MD-RD
_domain without the
of domains. Finally, although I coucenlrated m partial o~det
hf//ze ~s (similar to D"$I domain described in [1]),
plann~, in [7] I show that I~ fine-Plan can aho be exteadedm
where their ave/’ap l~ancas are similar. Both planners were
cover U~kreduction p~umecs.
started off with a m/ngoa/s
heuristic, wh’,~ranks ¯ partial plan by
the numb~of outmmd~gopm.ouaditi~s (i~., precom/ido~that
References
are not necessarily true accordingmMTC).I then systern~_,~,’J, ny
[!] A. Be~e~and D. W~d.Paffi~ Ofd~ Phmnms:Evakta~g Po~bk
varied the probability p (called the mis~ parameter) with
Efflden~GainsAnifwiaiIntelligence,VoL67, No.1, 1994.
which both planners will reject the direaiou recom~mded
by the
[2] D.Chapman.
Plmming
for cenjunctive
foals.
Artificial Intelii&e~¢e,
heuristic and will select the w(xst ranked branch instead. Assuming
32:333-377,198"7.
that the initi’al heuristic wasa goodheuristic fix the problem,to
[3] IL Cun-ieandA. Tare. O-Plm:1"heOpeaPimm;-$An:hiteaure.
ArtificialIntelligence,
S 1(1),1991.
¯ rust ord~ of approximatino, we would expect that incausing
misdirectionparameter
degrades
the planner’s ability to zero-in on
[4] M.G.Georgeff. Plsnn~g. lnReodb~sinPlannin~.MorgmKaufinarm.
1990.
thesolufious, forcing
ittocev~id.~larger
and larger parts of its
[5] l.Jaffarendl.LL~ Con~dntio~progrmmfing.InProceedin~s
search space. By our hypothesis, strong ~ strategies should
of POPL-87,
pag~l l l-l l9,1987.
help in such situatioas.
[6]
S.
gambhampsfi.PlanningasRefmemmtSearch:AtmWedframewedc
Thethirdplotin Figure
3 showsthetheperfeanance
of the
fin" omq)arstive analysis of Search Space Size and~ ASU
pinnn=s
(measured
interms
ofaverage
cputimetaken
forsolving
CSE TR 93-004, June,1993. Available
via ~ fllpfrom
¯ set of 20 randomproblems), as ¯ funetim of misdire~iou paonus318.,aa. an. edu:pub/~ao
rameter. ]~ shows that as the ~ parame~ in=eases, the
[7] S. Kambh~npafi.
Comparing
partialorderplanningandtask reduction
performance of TWEAK,
which employs no protextims, degrades
planning: A ~ report. ~U CSE TR-94-001.
muchmote d~asfically than that of SNLP-MTC,
which employs
[8] S. Kambhampafi.
Refinemmtsearch au a um~ingframeworkfe~
analyzingpiquingal~odthms.
In Pro¢.4th Intl. Conf.on Ppls. of l~
c~tributor protection. Theseresults thus suppott our hypothesis.
,e, R(!~.94),May1994.
[9] S. KambhampstL
Mu]fi-Comn’butor
Causal
Structures for Plmming:
A
$.3 Experimental ConcluMons
Fmnalizat~mdEvaku,fim.Attic/a/InSe///genoe.1994(To appear)
[I0] S.
Onthe Utility of Sysmnatia’ty: Uud=mndin
Whileour expe~nmtsinvolved ouly two artificis/domains, they do
s KambhampatL
~-sdeoffsbetwem
redundancy
snd c-,mml~mmt
in pmialorderplanning
bring out someganefalpatterns reprding the effect of traaabili~y
In ProeeO___
;,,gs of UCAI-93,Clmnb=y,~ 1993.
re.fmemmts and prote~.._ou strate~es ou perfonnan~ They show
[11] S.KmnbhampsliandD.S.Nau.OnlheNatureandRoleofModalTmth
that theempiricalperfoanance
differ~t~ betweenthefiveplanners
Criteriain Plmmng
Artificial Int#llige~¢e,1994(Toappear).
are determinedto a large extent by thedifferences
inthetractability
[12] C. Knoblock mdQ. Ymg.A Compsrismofthe SNLP~l TWEAK
refinements than by thedifferences
inprotectim
strategim. The
plmming
alg(xitt~,~ In Pro~. of AAAI
SpringSyrup.on Pounda~o,s
p~otectio~strategiasthemselves
rely act as an insurancepolicy that
paysoffintheworst-case
scenario
wheatheplanner is forced to
[13] D. McDermott.
Regem,sm
Planning.Intl. Jour. lmelligent Systems,
look
at¯ substantial
part
ofitssearch
space.
6".357-416,1991.
l~trth=, al.*hougheager tractability refinementswill degradethe [14] D. MeAlksterand D. RosmbI~t.Sy~tematinNon]inmrpls~t,$. In
Pro¢. 9/AAAA/,
1991.
l:erfmramcein general, they may sometimesimprove
theperferI. Bresina mu/A. PhilipL Total Order
mancebecause of theindirect
interactina
between
btandb,.Two [I$] $. M~, M. Dmmmm~
vs.
Pmtial Order Pluming: Factors ~g ~ In Pro¢.
faote~s
that
areprediaive
oftheb,-b,interaaim
are(0thepresence
1~-92,1992.
of high-frequmcy
credit]ms
(Le.,amd~swhichareestablished
LPmrLHeuristicx:lnt~iligemgmrchStmt~giesfor¢ompul#rProblem
anddeleted
by manyaa]msin the_d~n~in)
and(/0whether
the [16] go/v/~g. A~linm-Wak.y.
Reading.Mmmtchusettm
( 19~4).
Ifi~-fi’equmcy c~difims sre selected for establishmmt
towards [17] EP, D. P~lnaulL Syn~m/zingPlensthat~tzinactim~with~thebeginning
c~theend of theplanning process. Theexpea’hnmts
Depead~Effeew
Comlmla~nallmellig#n¢~,
VoL4,356-372(1988).
alsoshowdmttheperformance
ofplanners
usingconflict rasolutim [18] i.S. Pmbenhy and D. We~. ~ A SoumL Compk~ Pm~
su’ategias is morestable withrespect to the 5, and b, inn=acti~than
OrderPlmnerfor ADL.In Pro¢. KR-92,Novm~ber
1992.
that of planners using pre-(xdering m~.eg/as.This can be e~plained
[19] E. Ssce~ofi.Plm~gin¯ Hienrchyof Abm-act~Spaces. Artificial
by thefactthatthefctmet ammotesansitive
totherole
played by
Intelligence,$(2),1975.
the steps in the current partial plan than the latin.
[20] D.E. Smithand M.A.Peot. PoEponingSimple
Conflicts in Nonlinear
In Pro¢.EI,~MkAAAI,1993.
[21] A. Tste, G~ P~ Netw~ks. In Proceatings of I.ICAI-77,
p,t~s US.-893,
Beaea,MA,197"7.
Kaufmmm
(1988).
[7,2]D. W’,~-~Practical Plam, i~. Moqpm
KAMBHAMPATI
97
...")