BLOCK DIAGRAMS, BOND GRAPHS AND CAUSALITY
advertisement

BLOCK DIAGRAMS, BOND GRAPHS AND CAUSALITY
The main purpose of modeling is to develop insight.
“Drawing a picture” of a model promotes insight.
Why not stick with the familiar block diagrams?
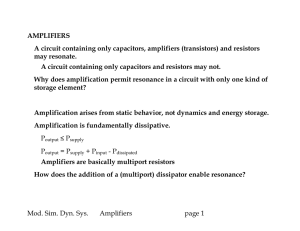
Block diagrams provide a picture of equations;
—they portray operators acting on signals.
Bond graphs are related to model equations,
—but there may be many different choices of equations to represent a
given model;
—there may be many different block diagrams corresponding to one bond
graph.
Mod. Sim. Dyn. Sys.
Block diagrams & bond graphs
page 1
m
k
b
C
R
L
Fk
Fm
Σ
xk
pm
vk
vm
Fb
Fk
vb
Fm
Σ
xk
pm
vk
vm
Fb
vb
m
k
R
C
b
Fk
Fm
Σ
xk
pm
vk
vm
Fb
vb
L
k
xk
∫ dt
Fk
Fm
Σ
∫ dt
pm
vk
vm
Fb
1 /m
vb
b
k
xk
∫ dt
Fk
Fm
Σ
m
pm
vk
vm
Fb
d /d t
vb
m
k
C
1 /b
b
1 /k
Fk
R
Fm
Σ
m
xk
pm
d /d t
vk
vm
Fb
vb
b
d /d t
L
k
xk
∫ dt
Fk
Fm
Σ
∫ dt
pm
vk
vm
Fb
1 /m
vb
b
k
xk
∫ dt
Fk
Fm
Σ
m
pm
vk
vm
Fb
d /d t
vb
m
k
C
1 /b
b
1 /k
Fk
R
Fm
Σ
m
xk
pm
d /d t
vk
vm
Fb
vb
b
d /d t
L
C
1
I
R
C
m
k
1
I
R
C
b
C
1
R
I
R
L
C
1
I
R
C
m
k
1
I
R
C
b
C
1
R
I
R
L
The three different ‘forms” of the model equations are distinct;
—they require different operators.
Version 1:
vm := ⌠⌡ dt
C
⎛F ⎞
⎜ m⎟
⎜
⎟
⎝m⎠
Fm := – Fb – Fk
R
Fb := b vb vb := vm
Fk := ⌠⌡ dt ⎛⎝k vk⎞⎠
Mod. Sim. Dyn. Sys.
vk := vm
Block diagrams & bond graphs
1
page 2
I
Version 2:
C
Fb
vb := b Fb := – Fm – Fk
d
Fm := m dt vm
vm := vb
Fk := ⌠⌡ dt ⎛⎝k vk⎞⎠
vk := vb
Mod. Sim. Dyn. Sys.
1
R
Block diagrams & bond graphs
page 3
I
Version 3:
C
1 d
vk := k dt Fk Fk := – Fb – Fm
R
Fb := b vb vb:= vk
d
Fm := m dt vm
vm := vk
In this simple example, the algebraic operators have inverses;
—that is not always the case.
Mod. Sim. Dyn. Sys.
Block diagrams & bond graphs
1
page 4
I
THE (TIME-) INTEGRATION AND DIFFERENTIATION OPERATORS ARE NOT EQUIVALENT.
Integration tends to attenuate noise;
Differentiation tends to amplify noise.
Numerical integration tends to be stable;
Numerical differentiation tends to be unstable.
Mathematically:
The set of finite-valued but possibly discontinuous functions of time is
closed under integration;
that set is not closed under differentiation.
Mod. Sim. Dyn. Sys.
Block diagrams & bond graphs
page 5
Version 1 is preferable
It corresponds to a state determined representation.
For example, define a state vector
⎡ Fk ⎤
x=⎢ ⎥
⎣vm⎦
and the system equations may be written in the form
ẋ := A x
as follows
0
k
⎡
F
⎡
⎤
k
d
⎢ ⎥
dt ⎣vm⎦ := ⎢ – 1 – b
⎣ m m
⎤ ⎡ Fk ⎤
⎥⎢ ⎥
⎦ ⎣vm⎦
The (time-) integration operator is used to generate a state trajectory x(t) from an
initial condition.
x(t) :=
t
⌠
⌡
A x(t) dt + x(to)
to
Mod. Sim. Dyn. Sys.
Block diagrams & bond graphs
page 6
CAUSAL ANALYSIS
IDENTIFIES INDEPENDENT ENERGY STORAGE ELEMENTS
Independent energy storage elements yield state variables
Inertias with effort input require time integration to determine their flow
output.
f(t) := Ψ{p(t)}
p(t) :=
t
⌠
⌡
e(t) dt + p(to)
to
Capacitors with flow input require time integration to determine their effort
output.
e(t) := Φ{q(t)}
q(t) :=
t
⌠
⌡
f(t) dt + e(to)
to
—This is called integral causality.
Mod. Sim. Dyn. Sys.
Block diagrams & bond graphs
page 7
CAUSAL ANALYSIS
IDENTIFIES DEPENDENT ENERGY STORAGE ELEMENTS
Inertias with flow input require time differentiation to determine their
effort output.
Capacitors with effort input require time differentiation to determine their
flow output.
—This is differential causality.
(also called derivative causality.)
IDENTIFIES STATE VARIABLES
Each constant of integration that can be specified independently identifies
a state variable.
State variables arise from energy storage elements.
Integral causal forms yield state variables.
—Differential causal forms do not.
Mod. Sim. Dyn. Sys.
Block diagrams & bond graphs
page 8