Real-time operating systems TDDB47 Real Time Systems
advertisement

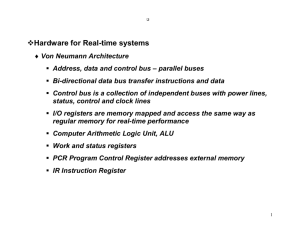
Real-time operating systems TDDB47 Real Time Systems • Lecture 7: Real-time operating systems and low level programming "The principal function of operating systems are to manage the hardware and software resources of the computer and to provide services to users." [Bick&Shaw88] • Two alternatives – Runtime support of a programming language (e.g. in smaller embedded systems) Calin Curescu – Standalone real-time OS Real-Time Systems Laboratory Department of Computer and Information Science Linköping University, Sweden – Where is the Java VM situated? The lecture notes are partly based on lecture notes by Simin Nadjm-Tehrani, Jörgen Hansson, Anders Törne. They also loosely follow Burns’ and Welling book “Real-Time Systems and Programming Languages”. These lecture notes should only be used for internal teaching purposes at Linköping University. Lecture 7: Real-time operating systems and low level programming Calin Curescu 35 pages • Lecture 7: Real-time operating systems and low level programming Calin Curescu Predictability • Deterministic behaviour of OS services and functions • Property applies most critically with respect to time – Within known bounds – At known times • 3 of 35 • In conventional OS – Most stuff hidden deliberately • High level abstractions • Transparency • In real-time systems – Access and control of mechanisms needed to guarantee predictability • Trick – provide useful and convenient abstractions for the user while – Offer detailed configurability – Give a detailed timeliness specification of components Lecture 7: Real-time operating systems and low level programming Calin Curescu Open system • Define and provide the right abstractions, but • Do not enforce particular solutions 2 of 35 Visibility and control Fault detection and management Lecture 7: Real-time operating systems and low level programming Calin Curescu Performs many of the general functions and services of normal OS + special requirements such as … 4 of 35 Real-time functions and services • • • • • Functions for time access & control Process and thread management Interrupt and event handling Device management Memory management – E.g. possible to define different task scheduling policies Lecture 7: Real-time operating systems and low level programming Calin Curescu 5 of 35 Lecture 7: Real-time operating systems and low level programming Calin Curescu 6 of 35 Functions for time access & control • Both absolute and relative time • Different levels of granularity • Operations for – Reading and setting clocks – Delaying for a given time – Programming timeouts • Recognise and deal with the non-occurrence of some event • Clocks should maintain the basic properties of time • Thus, clock-related ops: – highest priority – not interruptible Lecture 7: Real-time operating systems and low level programming Calin Curescu 7 of 35 Basic properties of time • Correctness • Bounded drift • Monotonicity • Increasing in value all the time • Chronoscopicity • At any time it should be possible to measure a time interval reasonably accurately (sudden large changes do not occur) Lecture 7: Real-time operating systems and low level programming Calin Curescu 8 of 35 Access to a Clock • • Delays By having direct access to the environment's time frame – Environment supplies a regular interrupt • e.g. GPS also provides a UTC service By using an internal hardware clock that gives an adequate approximation to the passage of time in the environment Time specified by program Granularity difference between clock and delay Process runnable here but not executable Process executing Interrupts disabled • From programmer’s perspective, access – Via a device driver – Clock primitive in the language Time • Lecture 7: Real-time operating systems and low level programming Calin Curescu 9 of 35 Local drift & cumulative drift • Cumulative drift can be eliminated Lecture 7: Real-time operating systems and low level programming Calin Curescu Absolute vs. relative delays • • • Relative delay – By busy waiting • Wasting CPU time – By language constructs • Usually underlying interrupt • Interrupt can be masked • Guarantees only a “runnable” state after delay Absolute delay Both absolute & relative need language constructs – Atomicity problem START := Clock; – Problematic example: 10 of 35 Programming timeouts • Shared variable communications – Mutexes usually bounded & accounted – Condition synchronisation however needs timeouts • Message-passing – Synchronous case – Asynchronous case • Timeouts on actions – Usually associated with timing error FIRST_ACTION; delay 10.0 - (Clock - START); SECOND_ACTION Lecture 7: Real-time operating systems and low level programming Calin Curescu 11 of 35 Lecture 7: Real-time operating systems and low level programming Calin Curescu 12 of 35 Process and thread management • • • • • Create, initialise , activate, terminate RT-tasks – Static or dynamic creation • Thread pools – static • Fork – usually dynamic Maybe direct support for periodic and sporadic processes Scheduling facilities should be accessible for – deciding when scheduler is called – what policy is used Availability of preemptive versions of – Scheduling – Synchronisation Priority inheritance policies – E.g. ceiling protocol Lecture 7: Real-time operating systems and low level programming Calin Curescu Scheduling examples • Mars – Feasible schedule of taskset with well defined timing and precedenc constraints is developed “off-line” – Stored in a table – A table-driven dispatcher used at run-time Spring – Critical tasks scheduled statically and guaranteed apriori – Handles also non-critical tasks that my arrive dynamically • Attempts to build a new schedule dynamically • If new schedule is feasible, task guaranteed to meet constr. Rialto – Guaranteed allocation of x time units every y time units • • 13 of 35 Lecture 7: Real-time operating systems and low level programming Calin Curescu Synchronisation & communications • Atomic actions • Timeouts • Messages – Event messages • Synchronous, asynchronous – State messages • Non - blocking • Sensors, overwriting old states, asynchronous – Timestamping • Causality, age Lecture 7: Real-time operating systems and low level programming Calin Curescu 15 of 35 Temporal scopes attributes • Deadline — the time by which the execution of a TS must be finished; • Minimum delay — the minimum amount of time that must elapse before the start of execution of a TS; • Maximum delay — the maximum amount of time that can elapse before the start of execution of a TS; • Maximum execution time — of a TS; • Maximum elapse time — of a TS. • Temporal scopes with combinations of these attributes are also possible Lecture 7: Real-time operating systems and low level programming Calin Curescu Temporal Scopes • • Can be – Periodic – Sporadic – Aperiodic 16 of 35 Deadline • The deadline can itself be expressed in terms of either – Absolute time Deadlines can be: – Hard – Soft – Interactive — performance issue – Firm Lecture 7: Real-time operating systems and low level programming Calin Curescu 14 of 35 – Execution time since the start of the temporal scope, or – Elapsed time since the start of the temporal scope. 17 of 35 Lecture 7: Real-time operating systems and low level programming Calin Curescu 18 of 35 Fault Tolerance of timing failures • It is necessary to be able to detect: – overrun of deadline – overrun of worst-case execution time – sporadic events occurring more often than predicted – timeout on communications • The last three failures in this list do not necessary indicate that deadlines will be missed – an overrun of WCET in one process might be compensated by a sporadic event occurring less often than the maximum allowed • Deadline overrun & FER Asynchronous notification – Event handling, behaves like an interrupt – Similar to exception handling • Difference: event usually NOT signaled by affected process • Termination model – It assumes that the recovery strategy requires the task to stop what it is doing – Asynchronous transfer of control (ATC) Resumption model – E.g. allowing the task to continue its execution at a different priority A similar approach can be used to detect a deadline overrun in a sporadic task • • Both forward and backward error recovery is possible Lecture 7: Real-time operating systems and low level programming Calin Curescu • Lecture 7: Real-time operating systems and low level programming Calin Curescu 19 of 35 Overrun of WCET • • • The consequences of an error should be restricted to a welldefined region of the program – It should be possible to catch the timing error in the process that caused it A process that consumes more of the CPU resource than has been anticipated – May miss its deadline – May cause a lower priority process with less slack available to miss its deadline The same mechanisms that were used to detect deadline overrun can be used – If elapsed time is equal to executed time – I.e. a process is non preemptively scheduled & does not block waiting for resources Lecture 7: Real-time operating systems and low level programming Calin Curescu Overrun of Sporadic Events • A sporadic event firing more frequently than anticipated has an enormous consequence for a system with hard deadlines • It is necessary either to ensure that this is prohibited or to detect it when it occurs and take some corrective action • There are essentially two approaches to prohibiting sporadic event overrun – If the event comes from a hardware interrupt, the interrupt can be inhibited from occurring by manipulating the associated device control registers. – To use sporadic server technology (see later) • Most real-time languages and operating systems are woefully lacking in support for detecting too frequent occurrence Lecture 7: Real-time operating systems and low level programming Calin Curescu 21 of 35 Interrupt and event handling • • Sequence 1. State of current task P is saved, interrupt identified, interrupt handler called 2. Handler (I.e. interrupt service routine) is executed – Most of the time – non-preemptive Source – Hardware – signals external event – e.g. timer – Software – generated by an instruction a mechanism for access to shared system routines – e.g. system calls • • Lecture 7: Real-time operating systems and low level programming Calin Curescu 22 of 35 Interrupts • Employed for – Scheduling – Asynchronous notification – Exception handling 20 of 35 23 of 35 3. P state is reloaded and continues from where it was interrupted, or 4. Interrupt has awakened a previously blocked task P’, and control is transferred to P’ Interrupt priorities (or levels) • Highest priority selected first, others executed after or lost ISR times measured and publicised • Timer interrupt must be very efficient, depends also on granularity Lecture 7: Real-time operating systems and low level programming Calin Curescu 24 of 35 Device management • Normally not accessible in usual OS • Needed here for predictability • For interaction with sensors, controllers, timers, other IO Lecture 7: Real-time operating systems and low level programming Calin Curescu Device Interface • The interface to a device is normally through a set of registers • Separate buses: – two sets of assembly instructions — one for memory access the other for device register access – e.g., the Intel 486 and Pentium range Memory-mapped I/O: – certain addresses access memory others the device registers – e.g., M68000 and PowerPC ranges • • The interface is used to control the device’s operations and to control the data transfer • Two control mechanisms: status driven and interrupt driven control Lecture 7: Real-time operating systems and low level programming Calin Curescu 25 of 35 Memory mapped vs. IO operations 26 of 35 Status Driven Data Data • Memory CPU Devices • Devices Address Address Data • CPU Memory Devices Devices • A program performs explicit tests in order to determine the status of a given device Then it can use three kinds of hardware instructions: – test operations to determine the status of the given device – control operations that direct the device to perform nontransfer device dependent actions • such as positioning read heads – I/O operations that perform the actual transfer of data between the device and the CPU Nowadays most devices are interrupt driven. – Interrupts can of course be turned off and polling of device status used instead. Interrupts are often no allowed in Safety Critical Systems Address Lecture 7: Real-time operating systems and low level programming Calin Curescu Lecture 7: Real-time operating systems and low level programming Calin Curescu 27 of 35 Interrupt Driven Elements for interrupt controlled devices • • • • Interrupt-driven program-controlled Interrupt-driven program-initiated (DMA) Interrupt-driven channel-program controlled • DMA and channel programs can cause cycle stealing from the processor; this may make it difficult to estimate the worst-case execution time of a process Lecture 7: Real-time operating systems and low level programming Calin Curescu • • • 29 of 35 28 of 35 Context switching mechanisms – Preserving the state,processing interrupt, restoring state – Saving State: PC, registers, program status info, priority, memory protection etc. • Basic: just the PC is saved; • Partial: PC and the PSW are saved; • Complete: full context is saved. Interrupting device identification Interrupt identification Interrupt control, enabling/disabling of interrupts may be performed by: – Status mechanisms – provide flags to enable/disable interrupts. – Mask interrupt – particular locations in an interrupt mask word – Level-interrupt – the current level of the processor determines which devices may or may not interrupt Lecture 7: Real-time operating systems and low level programming Calin Curescu 30 of 35 Abstract Models • • • • Memory Management All models require facilities for addressing and manipulating device registers – A device register may be represented as a program variable, an object, or even a communications channel A suitable representation of an interrupt: – procedure call – sporadic process invocation – asynchronous notification – shared-memory based condition synchronisation – message-based synchronisation All except the procedure, view the handler as executing in the scope of a process, and therefore require a full context switch Different models in different languages or OS Lecture 7: Real-time operating systems and low level programming Calin Curescu • Embedded RTS often have a limited amount of memory – This is due to: cost, or size, power or weight constraints • Fine grained memory control should e possible – So that it can be used effectively – Memory allocation restricted to parts of real memory – Allocation often statically and permanent • The more general issue is of storage management of the – Heap – Stack Lecture 7: Real-time operating systems and low level programming Calin Curescu 31 of 35 Heap management • For use with allocators (the new operator) • Key problems: – how much space is required (requires application knowledge) – when can allocated space be released • Returning allocated space – require the programmer to do it (malloc, free, sizeof in C) • error prone – requires the run-time to monitor memory and determine when it logically can no longer be accessed • scoped memory – requires the run-time to monitor memory and release it when it it is no longer being used - garbage collection in Java • Significant impact on response-time • Not trusted for RT-systems yet Lecture 7: Real-time operating systems and low level programming Calin Curescu 33 of 35 Reading • • Chapter 10 of book by Shaw Chapter 15.1 in Burns & Wellings – Particularities of Ada/Java etc. not interesting • • Extra Reading Chapter 12 of Jane Liu’s book on Real-time Systems, Prentice Hall 2000 Lecture 7: Real-time operating systems and low level programming Calin Curescu 35 of 35 32 of 35 Stack Management • Important for embedded systems • Specifying the stack size of a task/thread requires trivial support • Calculating the stack size is more difficult – Tasks enter blocks and execute procedures their stacks grow – Requires knowledge of the execution behaviour of each task – This knowledge is similar to that required to undertake WCET analysis • WCET and worst-case stack usage bounds can be obtained from control flow analysis of the task's code Lecture 7: Real-time operating systems and low level programming Calin Curescu 34 of 35