Document 13409059
advertisement

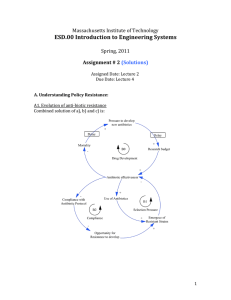
ESD.77 ESD.77 Multidisciplinary System Design Optimization Spring 2010 Barge Design Optimization Anonymous MIT Students ESD.77 What is a barge? Flat bottomed vessel, typically non self‐ propelled, used to carry low value, heavy or bulky items. 2 ESD.77 Motivation •Interest in marine environment disciplines. •Opportunity to use and bring together previous academic experience. •A common ship design problem would be extremely complex to handle in one semester. 3 Multi‐disciplinary ESD.77 M φ WL WL" WL Z φ WL" G B W K e Hydrostatics N Image by MIT OpenCourseWare. Ship Motion Degrees of Freedom Heave Yaw Hydrodynamics Surge Pitch Roll Sway Image by MIT OpenCourseWare. Structural Mechanics Compressive stress in deck 4 Tensile stress in keel Image by MIT OpenCourseWare. ESD.77 Problem Formulation Design Variables L Length B Beam D Depth t Plate Thickness Lower Bound 90 20 4 12 Upper Bound 140 35 9 28 Unit m m m mm v kg lcg ω H Design Parameters Speed Payload vertical center of gravity Payload longitudinal center of gravity Peak spectral frequency Significant wave height Value 10 1.2D 0.5L 0.7 2.5 Unit knots rad/sec m ρ Sea water density 1025 kg/m3 ρstr Material thickness 7850 kg/m3 Design Objective is to maximize payload (P) s.t. Barge cross‐section N<60 T<6m GM>0.15m σk,sag<250MPa σk,hog<250MPa Inequality Constraints Number of occurences of green water on deck per hour Draft Metacentric height Keel stress at sagging wave Keel stress at hogging wave σd,sag<250MPa Deck stress at sagging wave σd,hog<250MPa Deck stress at hogging wave 5 ESD.77 Input/Output Diagram v Inputs L,B,D,t N Hydrodynamics Outputs T Hydrostatics Hydrosta tics GM P,wstr σmax Structural Mechanics May 5,2010 6 ESD.77 Modeling in MATLAB Multidisciplinary Feasible (MDF) Model • Payload, the objective function, is also required as input by all modules. • Feasibility is enforced at each optimization iteration. May 5,2010 7 ESD.77 Modeling in MATLAB Hydrodynamics Ship Motion Degrees of Freedom • Curve fitting of experimental local hydrodynamics properties from Lewis theory to allow for a continuous design space exploration. • Seakeeping analysis for coupled heave and pitch motions using 2D strip theory. Heave Yaw Surge Pitch Roll Sway Image by MIT OpenCourseWare. Assumption: •Bretschneider spectrum with significant wave height of 2.5m and peak spectral frequency of 0.7rad/sec 8 ESD.77 Modeling in MATLAB Hydrostatics M WL WL" WL φ Z WL" G B N W K e • Determines the vertical metacentric height which is evaluated against American Bureau of Shipping (ABS) rules. φ Image by MIT OpenCourseWare. Assumption: •Vertical position of payload’s center of gravity at 1.2*D 9 ESD.77 Modeling in MATLAB Structural Mechanics • Uses ABS parametric equations to determine maximum keel and deck stresses in sagging and hogging wave conditions. Compressive stress in deck Assumptions: •Uniform longitudinal weight distribution. Tensile stress in keel Image by MIT OpenCourseWare. 10 ESD.77 Simulation and Benchmarking ⎡ L ⎤ ⎡122⎤ ⎢ ⎥ ⎢ ⎥ B⎥ ⎢ 30 ⎥ ⎢ = x= ⎢D⎥ ⎢ 6.1⎥ ⎢ ⎥ ⎢ ⎥ ⎣ t ⎦ ⎣ 16 ⎦ P=14,670tons T=4.35m N is the active constraint Source: McDonough Marine Service 11 ESD.77 Initial Design Space Exploration •4 Design variables •3 Level (lower bound, mid, higher bound) •JMP Statistical Software •Generate DOE to capture main effect and two‐way interactions •48 runs (16 were unfeasible) 12 ESD.77 Initial Design Space Exploration Analysis of 32 feasible designs: Recommended starting point for numerical optimization: ⎡140⎤ ⎢ ⎥ 35 ⎥ ⎢ x= ⎢9 ⎥ ⎢ ⎥ ⎣ 20 ⎦ 13 ESD.77 Gradient‐Based Optimization SQP‐MATLAB’s “fmincon”: •Ability to handle multiple variables •Ability to handle design variables’ bounds Results: P=23,530tons: ⎡137.8⎤ ⎢ ⎥ 34.2 ⎥ * ⎢ x = ⎢ 8.7 ⎥ ⎢ ⎥ 14.2 ⎣ ⎦ vs. ⎡140⎤ ⎢ ⎥ 35⎥ ⎢ x= ⎢ 9 ⎥ ⎢ ⎥ ⎣ 20 ⎦ 14 ESD.77 Sensitivity Analysis Sensitivity Analysis Normalized Sensitivities Variables: Design V Variable t D B L ‐0.2 Parameters: 0.0 0.2 0.4 0.6 0.8 1.0 1.2 0.0 0.1 Normalized Sensitivities Active constraints: •N •σd,hog Design Parameter H ω kg v ‐0.6 ‐0.5 ‐0.4 ‐0.3 ‐0.2 ‐0.1 15 ESD.77 Post‐Optimality Analysis •Hessian diagonal entries close to O(1) •No improvement was achieved by trying to scale the design variables 4 -2 Current Function Value: -23530.761 x 10 -2.05 Function value -2.1 -2.15 -2.2 -2.25 -2.3 -2.35 -2.4 0 2 4 6 8 10 Iteration 12 14 16 18 16 ESD.77 Heuristic Optimization Genetic Algorithm: •Easy implementation of fitness function •Close to the optimum ⎡137.8⎤ ⎡138.7⎤ ⎢ ⎥ ⎢ 34.6 ⎥ 34.2 ⎥ * ⎢ ⎥ ⎢ Results: P=22,468tons at x = vs. x = ⎢ 8.9 ⎥ ⎢ 8.7 ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ 14.2 ⎦ ⎣ 25.1 ⎦ 17 ESD.77 Global Optimum Leveraging: •DOE •Gradient‐based optimization •GA ⎡137.8⎤ ⎢ ⎥ 34.2 ⎥ * ⎢ Maximum Payload of P=23,530tons at x = ⎢ 8.7 ⎥ ⎢ ⎥ 14.2 ⎣ ⎦ 18 ESD.77 Multi‐Objective Optimization Optimal Point Utopia Point Trade‐off analysis at optimal payload solution: For an extra ton of payload we need to add 244kg of structural weight 19 ESD.77 Conclusions Model fidelity can be improved: Cross‐section, scantlings, non‐uniform plate thickness Consider most appropriate sea spectrum Evaluate all 6 degree of freedom motions and most importantly roll. But will make optimization more challenging. 20 ESD.77 Back‐up 21 MIT OpenCourseWare http://ocw.mit.edu ESD.77 / 16.888 Multidisciplinary System Design Optimization Spring 2010 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.