Imaging with ambient noise feature
advertisement

Imaging with
ambient noise
Roel Snieder and Kees Wapenaar
feature
Whether noise is a nuisance or a signal depends on how it’s processed.
By cross-correlating noise recorded at two sensors, researchers can
retrieve the waves that propagate between them and extract details
about the intervening medium.
Roel Snieder is the W. M. Keck Distinguished Professor of Basic Exploration Science and director of the Center for Wave Phenomena at the
Colorado School of Mines in Golden. Kees Wapenaar is a professor of applied geophysics at Delft University of Technology in Delft, the
Netherlands.
Recent developments in seismology, ultrasonics, and
underwater acoustics have led to a radical change in the way
scientists think about ambient noise—the diffuse waves generated by pressure fluctuations in the atmosphere, the scattering of water waves in the ocean, and any number of other
sources that pervade our world. Because diffuse waves consist of the superposition of waves propagating in all directions, they appear to be chaotic and random. That appearance
notwithstanding, diffuse waves carry information about the
medium through which they propagate.
During the past decade, experimental and theoretical
work has shown that such waves can produce an elastic response to a point source in the medium. That response is valuable because it can be used to determine the properties of the
medium—for instance, using waves reflected from the
medium’s discontinuities to provide the location and nature
of those discontinuities or waves transmitted through the
medium to infer their acoustic or seismic velocity. Perhaps
surprisingly, the elastic response can be determined from
recorded diffuse waves through a simple processing step:
cross-correlation, a statistical measure of the waveforms’ similarities at different points in space as a function of the time
lag applied to one of them.
More specifically, if one were to measure a diffuse wave
field that propagates through two arbitrary points in space,
the cross-correlation of the two noise registrations would
give the same response of the medium that would be measured if there were a source at one of the two points and a receiver at the other. Thus, by just listening passively to ambient noise and applying a simple data-processing operation,
Retrieving the Green function
Imagine a closed system that vibrates in response to random
noise sources. Given a set of normal modes un(x), the Green function that describes the impulsive response can be written
G(x,x′,t) = ∑un(x)un(x′)cos(ωnt)H(t) ,
(1)
n
where H(t) is the Heaviside function, zero for negative time and 1
for positive time, and ωn is the angular frequency of mode n.
We outline Oleg Lobkis and Richard Weaver’s derivation of
such a Green function,6 starting with a state of motion in which
the time derivative of pressure fluctuations is given by
ν(x,t) = ∑(an sin(ωnt) + bn cos(ωnt))un(x) ,
(2)
n
where the modal coefficients an and bn are random numbers
with zero mean. The modes are assumed to be excited with
equal energy and have uncorrelated excitations. That is,
⟨anam⟩ = ⟨bnbm⟩ = Sδnm
and ⟨anbm⟩ = 0 ,
(3)
where ⟨ ⟩ denotes the expectation value and S is the modes’ excitation energy.
Next, consider the time-averaged cross-correlation of the
field at two locations xA and xB,
44
September 2010
Physics Today
CAB(τ) =
1 T
∫⟨ν(xA , t + τ)ν(xB ,t)⟩dt .
T 0
(4)
The length of the time integration is denoted by T, and τ denotes
the lag time used in the correlation. Inserting the normal-mode
expansion (2) in that integral gives a double sum over modes.
After taking the expectation value, the double sum reduces to
the following single sum by virtue of the expectation values of
equation (3):
CAB(τ) = ∑S un(xA)un(xB)
n
1
T
T
∫0 {cos[ωn(t + τ)] cos(ωnt)
+ sin[ωn(t + τ)] sin(ωnt)} dt
(5)
= ∑S un(xA)un(xB) cos(ωnτ) .
n
A comparison of this equation with the general Green
function (1) shows that when τ > 0, the last term is equal to
SG(xA,xB,τ), and when τ < 0, it is equal to SG(xA,xB,−τ). Hence,
CAB(τ) = S[G(xA, xB, τ) + G(xA, xB, −τ)] .
(6)
The expectation value of the cross-correlation thus gives
the superposition of the Green function and its time-reversed
counterpart.
© 2010 American Institute of Physics, S-0031-9228-1009-030-7
DEPTH (km)
0.0
a
b
A
A
0.2
B
B
0.4
0.0
−0.2
0.0
DISTANCE (km)
0.2
c
DEPTH (km)
−0.4
0.5
TIME (s)
1.0
A
0.2
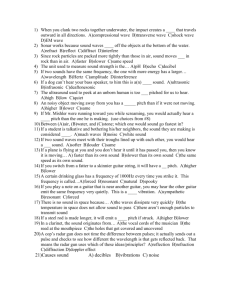
Figure 1. (a) At an oil-production facility in Canada, a layer
of heavy oil (pink) is liquefied by the injection of steam
0.3
through a series of underground wells (gray), as depicted in
the schematic. Noise (red star) from industrial pumps and
B
other equipment is generated at the surface and recorded
0.4
along a vertical array of geophones (blue dots). (b) As the
−0.4
−0.2
0.0
0.2
0.4
noise signal propagates down the array, geophones A and B
TIME DIFFERENCE (s)
record the wave motion at the shallowest and deepest sites.
(c) Each of the eight traces is the result of cross-correlating
one day of noise recorded by geophone B with noise recorded by another geophone in the series. The projection of the red line
along the time axis gives the travel time of a compressive wave propagating from A to B. (Adapted from ref. 8.)
one obtains the same information that would be obtained in
a controlled experiment using an impulsive source such as
an explosion or earthquake to generate a pressure field. In
the case of ambient noise, however, one speaks of a virtual
source, not a real source.
That principle holds no matter how complex the heterogeneities and boundaries of the medium. What’s more, there
are numerous cases in which it can be advantageous to use a
virtual source. For example, although seismologists routinely
use waves excited by earthquakes to image Earth’s deep structure, the earthquakes themselves occur only in certain regions
of the planet, which restricts how well seismic waves illuminate faraway parts of the subsurface. But in the case of ambient noise, every seismometer can act as a source. Indeed, by
deploying dense networks of seismometers, researchers have
reconstructed with unprecedented detail the structure and
properties of Earth’s crust in many parts of the world.1
Examples go well beyond seismology. For instance, researchers have used the noise of thermal fluctuations in an
aluminum specimen as the basis for ultrasonic pulse-echo
measurements of its structure;2 extracted coherent wavefronts from acoustic noise in the ocean and atmosphere3 (data
that, in the case of the ocean, yield the speed of sound and
thus constrain its temperature and salinity); and measured
the stiffness of muscle tissue by monitoring the mechanical
vibrations that occur during the muscle’s contractions.4 Moreover, the use of ambient noise is especially convenient in
cases where it’s not practical or even safe to place a real noise
source, such as in a crowded urban environment or in the
ocean near sensitive marine mammals.
Because the response to an impulsive point source is, by
definition, equal to a Green function, the methodology of
turning noise into a signal is often called Green function retrieval or, in seismological applications, seismic interferometry, a term introduced by the University of Utah’s Gerard
www.physicstoday.org
Schuster.5 “Interferometry” is, in that context, borrowed from
radio astronomy, in which it refers to cross-correlation methods applied to radio signals from distant objects.
Closed and open systems
In their early work in 2001 extracting the Green function from
ultrasonic noise correlations in aluminum, University of Illinois physicists Oleg Lobkis and Richard Weaver provided a
beautiful derivation of the method by assuming that all normal modes in the material are excited by uncorrelated noise
sources of equal strength, as outlined in the box on page 44.6
It was later recognized that the theoretical explanation is akin
to the fluctuation–dissipation theorem7 discovered in 1951.
That theorem relates the correlation of field fluctuations due
to thermal excitations to the impulse response of the system
and thus provides a thermodynamic explanation of the principles presented here.
Lobkis and Weaver’s elegant normal-mode formulation
came from their analysis of a closed system—a block of aluminum. Although Earth is also a finite body with a free surface, it’s often more natural to consider it an open system.
After all, the penetration depth of the waves in many seismic
observations is far less than Earth’s diameter, so the waves
never sample the entire planet. Fortunately, for those circumstances, the data-processing technique suggested by Lobkis
and Weaver is still valid, although the theoretical justification
is different. One can, in fact, relate the principle of Green function retrieval to time reversal, as described by articles in
PHYSICS TODAY by Mathias Fink (March 1997, page 34) and by
Carène Larmat, Robert Guyer, and Paul Johnson (August
2010, page 31).
The analysis of industrial noise propagating down a
monitoring well at a Canadian heavy-oil production facility,
as illustrated in figure 1a, provides an example of Green
function retrieval in the simplest situation, in which wave
September 2010
Physics Today
45
rS
xA
0°
xB
180°
TIME DIFFERENCE (s)
−90°
−1.0
b
TIME DIFFERENCE (s)
−1.0
a
−0.5
0.0
0.5
c
−0.5
0.0
0.5
ϕS
90°
1.0
−90°
0°
90°
ϕS
180°
270°
1.0
RECONSTRUCTED
SIGNAL
Figure 2. Green function retrieval in a two-dimensional open system. (a) Point sources of noise (red dots) whose positions
are denoted by radius rS and azimuth ϕS send waves to receivers at xA and xB. The dashed lines delimit zones in which the
cross-correlation of noise recorded at receivers A and B does not, to first order, depend on the angle ϕS. (b) The crosscorrelation of signals that arrive at A and B from each source is plotted as a function of the lag time of the cross-correlation
and source azimuth ϕS. The dashed lines delimit zones where waves constructively interfere. (c) The sum of the correlations
in the plot yields two waves at ±0.6 s that propagate between the receivers in opposite directions and are described by the
Green function and its time-reversed counterpart G(xA,xB,t) + G(xA,xB,−t). (Adapted from K. Wapenaar, J. Fokkema, R. Snieder,
J. Acoust. Soc. Am. 118, 2783, 2005.)
propagation is essentially one dimensional. In 2008
Masatoshi Miyazawa and colleagues took field data of the
ground motion excited by the pumps and other industrial
machinery used to inject steam into numerous wells in order
to melt the heavy oil.8 The noise propagates down an array
of geophones in the monitoring well from the shallowest geophone (A) to the deepest (B). Although the two signals in figure 1b recorded at those sites hardly appear related, correlations between them are hidden in the time series and can be
extracted by computing the cross-correlation:
CAB(τ) =
1 T
∫⟨ν(xA , t + τ)ν(xB ,t)⟩dt ,
T 0
a time-averaged integral in which ν represents the waveform
at the two geophones, τ represents the time lag of a wave’s
arrival at B after passing A, and T represents the integration
time—about 15 s in this example. The ensemble average is
then estimated by averaging the result over all 15-s intervals
in one day. After bandpass filtering, the results of processing
noise recorded at B with that of all the other sensors give the
eight traces shown in figure 1c. The correlation of the noise
at the deepest geophone with itself amounts to an autocorrelation, which peaks at time t = 0 and represents the compression of the noise into a spike.
The cross-correlation process reveals a pulse that propagates down the array and is visible as the downwardpropagating wave. The red line gives the travel time of that
wave computed from known properties of the rock. And the
wave itself can be parsed into compressive- and shear-wave
components by cross-correlating the vertical and horizontal
components of the noise recorded at each geophone. By repeating the cross-correlation for two perpendicular horizontal
components Miyazawa and colleagues retrieved the Green
function for two downward-propagating shear waves with
perpendicular polarizations. The tiny differences in travel time
between those shear waves provide information on the orien46
September 2010
Physics Today
tation of cracks in the rock and hence the directional permeability of the rock to the flow of fluid.
The cross-correlation of two signals depends, by definition, on the time difference of those signals. Suppose that the
travel time of a noise burst from the source to receiver B is
given by tB = (zB − zS)/c, where zB is the depth of geophone B,
zS is the depth of the noise source, and c is the wave velocity.
The noise burst arrives at geophone A at time tA = (zA − zS)/c.
Cross-correlation of the noise bursts at sensors A and B extracts an impulsive wave arriving at time tA − tB = −(zB − zA)/c.
Note that the time is independent of the source depth zS,
thanks to the fact that the waves propagating from the source
to sensors A and B share a common path.
Since zB > zA, the cross-correlation yields an arrival time
tA − tB < 0. And indeed, the waves in figure 1c arrive at negative time, due physically to the fact that noise generated at
the top of the wells reaches the shallower geophones before
the deeper ones. Were noise also generated beneath the array,
those waves would reach the sensors in the reverse order and
cross-correlation would then yield an impulsive wave arriving at positive time. A general property of Green function retrieval is that when the noise sources are uncorrelated and
distributed evenly in space, cross-correlation of the noise
recorded at points xA and xB gives G(xA,xB,t) + G(xA,xB,−t), the
superposition of a Green function and its time-reversed counterpart, as derived in the box.
The physical reason for retrieving that superposition is
that in a truly diffusive field, waves propagate with equal
strength from xA to xB as they do in the opposite direction.
The Green function, moreover, is causal, which means that
G(xA,xB,t) is only nonzero for t > 0 and G(xA,xB,−t) is only
nonzero for t < 0. Separating the two contributions to the
cross-correlation can be achieved by parsing the retrieved
signal for t > 0 and t < 0, respectively.
Toward higher dimensions
The simplicity of the field example in figure 1, in which waves
www.physicstoday.org
100
50°
70
LATITUDE
50
35
40°
25
35°
NORMALIZED AMPLITUDE
45°
15
30°
235°
240°
245°
250°
LONGITUDE
255°
0
Figure 3. A large array of seismometers (white triangles) in the western US captures the seismic response of
a virtual source (white star), located just southeast of
Lake Tahoe, California, at a moment in time. The snapshot, taken 200 s after a virtual impulse, was obtained by
cross-correlating three years of ocean-generated ambient noise recorded at the station denoted by the star
with noise recorded at each of the other stations. The result is a surface wave that propagates from the virtual
source outward through the other stations in the array.
The approach offers an unprecedented illumination of
Earth’s crust. (Adapted from ref. 12.)
propagate essentially in one dimension, belies the complexity
of retrieving the Green function in higher dimensions from
the cross-correlation of noise recorded at pairs of sensors receiving input from all possible directions. The 2D numerical
example in figure 2 illustrates the principle of Green function
retrieval and shows the essential role that constructive interference plays in the process.
That 2D example consists of many point sources, denoted by red dots, distributed over a “pineapple slice,” each
emitting transient signals that propagate at 2000 m/s through
a homogeneous medium to two receivers at xA and xB,
1200 m apart. The positions of those sources in figure 2a are
denoted by their radius rS and azimuth ϕS. The signals that
arrive at points A and B from each source are cross-correlated; the result is shown in figure 2b. The arrival times of the
wave in the plot vary smoothly with ϕS despite the randomness of the source radii because only the time difference along
the paths from each source to xA and xB matters in the crosscorrelation process.
A source in figure 2a at ϕS = 0° launches waves that propagate along a straight line from the source via xA to xB. Crosscorrelation of signals emitted by that source reveals a wave
arriving at time (∣xA − xS∣ − ∣xB − xS∣)/c = −∣xB − xA∣/c = −0.6 s at
ϕS = 0° in figure 2b. When the cross-correlations of signals
emitted by all sources, not just the one at ϕS= 0°, are
summed—that is, when the waves in figure 2b are summed
over all angles—the time-symmetric response shown in
figure 2c emerges: two waves arriving at 0.6 s and −0.6 s,
www.physicstoday.org
respectively. As discussed earlier, those events are equivalent
to the response of the medium at xB to a source at xA.
In the sum, only signals arriving at ±0.6 s survive. Waves
emitted by sources in the vicinity of ϕS = 0° and ϕS = 180°—
the so-called stationary-phase zones delimited by green
dashed lines in figures 2a and 2b—interfere constructively,
whereas waves excited by sources at other angles interfere
destructively.9 It’s because the waves have a finite frequency
bandwidth that sources around 0° and 180° also contribute.
The noise that exists between the two events in figure 2c
is due to the fact that noise sources outside the stationary
phase zone cancel each other completely only when they are
sufficiently close to each other. Sampling criteria have been
formulated that stipulate how dense the source distribution
should be in order to reliably retrieve the Green function.10
Tomography
One of the most widely used applications of ambient-noise
interferometry is the retrieval of seismic surface waves between seismometers, first demonstrated in 2003 by Michel
Campillo and Anne Paul at Joseph Fourier University,11 and
the subsequent tomographic determination of the waves’ velocity distribution in Earth’s crust and mantle.1 In layered
media, surface waves consist of several propagating modes,
of which the fundamental mode is usually the strongest. As
long as only the fundamental mode is considered, surface
waves can be seen as an approximate solution of a 2D scalar
wave equation with a frequency-dependent propagation velocity. By analogy with the analysis of figure 2, the Green
function of the fundamental mode of a surface wave can thus
be extracted by cross-correlating ambient-noise recordings
from any two seismometers. Indeed, when many seismometers are available, the correlation can be repeated for any
combination of two seismometers. Each seismometer becomes a virtual source, the response to which is observed by
all other seismometers.
Earth’s surface waves come in two types: Rayleigh
waves, which are polarized in the vertical plane in the direction of propagation, and Love waves, which are polarized
horizontally, perpendicular to the direction of propagation.
Figure 3, from work by Fan-Chi Lin of the University of Colorado at Boulder and his colleagues, shows a beautiful example of the Rayleigh-wave response to a virtual source southeast of Lake Tahoe, California.12 The white triangles
surrounding the virtual source (the white star) represent the
more than 400 seismometers that make up Earthscope’s USArray, spread throughout the western US.
Ocean-generated ambient noise was recorded by the USArray between October 2004 and November 2007. The interference of ocean waves propagating in opposite directions
produces pressure fluctuations at the ocean bottom that excite seismic waves in solid Earth. Since the seismic noise
comes from the ocean, it is far from isotropic. That means that
the correlation of noise between any two stations does not
yield time-symmetric results like those in figure 2. However,
as long as one of the stationary-phase zones is sufficiently
covered with sources, it is possible to retrieve either G(xA,xB,t)
or G(xA,xB,−t).
Lin and colleagues captured the snapshot shown in figure 3 by cross-correlating, one by one, the noise recorded at
one station (the white star) with that recorded at each of the
others. The amplitudes exhibit azimuthal variation due to the
anisotropic illumination by the ambient noise. The response
can be used for tomographic reconstruction of the Rayleighwave velocity in the crust and the directional dependence of
that velocity. The Rayleigh-wave velocity in turn can be used
September 2010
Physics Today
47
a
b
Output
Input
Figure 4. Retrieving the reflection response from ambient noise. (a) Consider an arbitrary, inhomogeneous, lossless medium
with noise sources (red) buried in its subsurface and two geophones at its free surface. Those noise sources send waves that
reach the geophones directly or after reflecting from subsurface discontinuities. (b) The cross-correlation of noise signals
recorded by the two geophones reveals the same reflection response that would be observed by one of the geophones if there
were an impulsive source at the position of the other.
to infer the temperature and composition of the crust, and the
directional dependence helps constrain the tectonic deformation the region has experienced.
Florent Brenguier of the Institut de Physique du Globe
de Paris and colleagues have extended that approach to 3D
tomographic inversion.13 From noise measurements at the
Piton de la Fournaise volcano they retrieved the Rayleighwave group velocity distribution as a function of frequency
and used it to derive a 3D shear-wave velocity model of the
volcano’s interior. In the past couple of years, such applications of direct surface-wave interferometry have expanded
spectacularly. Their success is largely explained by the fact
that surface waves are by far the strongest waves excited by
ambient seismic noise.
The reflection response
So far, we have considered waves that propagate as transmitted waves between receivers. Let’s next consider the impor-
9
Figure 5. A three-dimensional
reflection image of the geology
beneath the Libyan desert, based
on data obtained by crosscorrelating 11 hours of ambient
noise. The horizontal stripes indicate discontinuities in Earth’s crust
due to the juxtaposition of different rock types. Such images are
essential for the exploration and
production of oil and gas.
(Adapted from ref. 15.)
x (km)
8
tant case of reflected waves, which form the basis for delineating discontinuities in, for example, Earth or the human
body. As early as 1968, Stanford University geophysicist Jon
Claerbout showed that for a horizontally layered medium,
the autocorrelation of a transmission response gives its reflection response.14 That means that if one has measured the
waves that are transmitted through a layered medium, one
can infer the waves that are reflected within it.
To appreciate how that works in arbitrary inhomogeneous
media, consider the situation in figure 4a, where noise
sources—for example, from micro-earthquakes or far-off
events whose waves refract upward—illuminate a stack of reflecting layers from below. Noise sources launch waves that
propagate to one of the receivers, reflect off the free surface,
then reflect again from layers in Earth before propagating to the
other receiver. Cross-correlation of the waves recorded at two
receivers gives the reflected waves that propagate between
them, as shown in figure 4b. Those reflected waves can then be
7
6
5
4
3
2
1
1
2
y (km)
0.5
1
z (km)
48
September 2010
Physics Today
www.physicstoday.org
used for imaging the subsurface via the same techniques applied to active sources in exploration geophysics.
Deyan Draganov from Delft University of Technology
and colleagues applied that methodology to ambient noise
recorded by Shell in a desert area near Ajdābiyah, Libya.15
Eleven hours of noise were recorded along eight parallel geophone lines extending about 20 km and separated by 500 m.
Each line consisted of approximately 400 groups of geophones evenly spaced. Much of the processing was dedicated
to suppressing surface waves caused by nearby road traffic.
The cross-correlation approach retrieved the reflection responses of many virtual sources at the surface. Those responses were then turned into a 3D image of the subsurface
using standard seismic imaging methods. Cross sections are
shown in figure 5. The horizontal stripes correspond to discontinuities in Earth associated with the juxtaposition of different rock types.
Such images help seismologists understand the geologic
structure of the subsurface and are a major tool in the exploration and production of oil and gas. Potential applications
of the method range from exploration for hydrocarbons in
environmentally sensitive areas, where active sources cannot
be used, to the crustal- and even global-scale imaging of
Earth’s substructure.
Further applications
Researchers are not limited to ambient seismic noise on Earth
for their geophysical explorations. Observations of ambient
noise on the surfaces of the Sun and the Moon have been used
to retrieve helioseismological shot records and the timedependent impulse response of the Moon.16 Developments
are now under way to retrieve Earth’s electromagnetic impulse response from natural and manmade variations in its
electromagnetic fields. Cross-correlating seismic noise with
electromagnetic noise observations may yield the electroseismic response and thus provide a basis for imaging the
poroelastic properties of the subsurface. The theory for Green
function retrieval from noise has been generalized for a wide
class of linear equations, which means the method is applicable to noise correlations in wave fields ranging from those
governed by quantum mechanics to those typically encountered in structures such as buildings and bridges.17
When noise sources persist for long times, a system’s
Green function can be extracted on a quasi-continuous basis.
That makes the method particularly useful for passive monitoring. Applications include detecting changes in seismic velocity due to the relaxation in stress after an earthquake and
monitoring damage in metal structures.18
More broadly, the wave motion in Earth depends on both
the properties of Earth and the mechanism of the seismic
source. In the traditional seismic method, that source must
be known if the recorded waves are to be used to infer the
structure of Earth’s crust or mantle. When the impulse response is retrieved from noise measurements, the mechanism
of the source—a virtual source—is known, which eliminates
one unknown.
The fact that Green function retrieval by crosscorrelation leads to new responses from measured field fluctuations has generated much enthusiasm this past decade
and prompted collaborations among researchers in seismology, acoustics, and electromagnetic prospecting.
A major advantage of statistical correlations is that they
require no knowledge either of the medium’s parameters or
of the positions or timing of the actual noise sources. The
processing is driven entirely by noise signals that pass
through different points in space and time. Thanks partly to
September 2010
Physics Today
49
that simplicity—and the ubiquity of ambient noise sources
around us—we expect many new applications to emerge in
the coming years.
References
1. N. M. Shapiro et al., Science 307, 1615 (2005); K. G. Sabra et al.,
Geophys. Res. Lett. 32, L14311 (2005), doi:10.1029/2005GL023155.
2. R. L. Weaver, O. I. Lobkis, Phys. Rev. Lett. 87, 134301 (2001).
3. P. Roux et al., J. Acoust. Soc. Am. 116, 1995 (2004); M. M. Haney,
Geophys. Res. Lett. 36, L19808 (2009), doi:10.1029/2009GL040179.
4. K. G. Sabra et al., Appl. Phys. Lett. 90, 194101 (2007).
5. G. Schuster, Seismic Interferometry, Cambridge U. Press, New
York (2009).
6. O. I. Lobkis, R. L. Weaver, J. Acoust. Soc. Am. 110, 3011 (2001).
7. H. B. Callen, T. A. Welton, Phys. Rev. 83, 34 (1951); J. Weber, Phys.
Rev. 101, 1620 (1956).
8. M. Miyazawa, R. Snieder, A. Venkataraman, Geophysics 73(4),
D35 (2008).
9. R. Snieder, Phys. Rev. E 69, 046610 (2004); R. Snieder, K. Wapenaar, K. Larner, Geophysics 71(4), SI111 (2006).
10. K. Mehta et al., Leading Edge 27, 620 (2008); Y. Fan, R. Snieder,
Geophys. J. Int. 179, 1232 (2009).
11. M. Campillo, A. Paul, Science 299, 547 (2003).
12. F.-C. Lin, M. H. Ritzwoller, R. Snieder, Geophys. J. Int. 177, 1091
(2009).
13. F. Brenguier et al., Geophys. Res. Lett. 34, L02305 (2007),
doi:10.1029/2006GL028586.
14. J. F. Claerbout, Geophysics 33, 264 (1968); for a generalization to
arbitrary, inhomogeneous media, see K. Wapenaar, Phys. Rev.
Lett. 93, 254301 (2004).
15. D. Draganov et al., Geophysics 74(5), A63 (2009).
16. J. Rickett, J. Claerbout, Leading Edge 18, 957 (1999); E. Larose et al.,
Geophys. Res. Lett. 32, L16201 (2005), doi:10.1029/2005GL023518.
17. R. Snieder, K. Wapenaar, U. Wegler, Phys. Rev. E 75, 036103
(2007); R. Weaver, Wave Motion 45, 596 (2008).
18. U. Wegler, C. Sens-Schönfelder, Geophys. J. Int. 168, 1029 (2007);
F. Brenguier et al., Science 321, 1478 (2008); A. Duroux et al.,
J. Acoust. Soc. Am. 127, 3311 (2010).
■
MDC VACUUM PRODUCTS
Your trusted resource
and solution provider
Quality
You Need
Value
You Want
engineered process solutions
MDC’S STANDARD CHAMBERS
MDC now offers a standard line
of Spherical, Cylindrical, Box and
D-shape Chambers designed for
UHV service.
For more information contact
Technical Sales at
techsales@mdcvacuum.com
or 800-443-8817.
(800) 443-8817
www.mdcvacuum.com
MDC Vacuum Products, LLC and all divisions are ISO 9001:2008 Certified