Endocardial boundary extraction in left ventricular B-spline snake algorithm
advertisement

Int J CARS (2010) 5:501–513
DOI 10.1007/s11548-010-0404-0
ORIGINAL ARTICLE
Endocardial boundary extraction in left ventricular
echocardiographic images using fast and adaptive
B-spline snake algorithm
Mahdi Marsousi · Armin Eftekhari ·
Armen Kocharian · Javad Alirezaie
Received: 14 January 2009 / Accepted: 15 December 2009 / Published online: 16 March 2010
© CARS 2010
Abstract
Purpose A fast and robust algorithm was developed for automatic segmentation of the left ventricular endocardial boundary in echocardiographic images. The method was applied to
calculate left ventricular volume and ejection fraction estimation.
Methods A fast adaptive B-spline snake algorithm that
resolves the computational concerns of conventional active
contours and avoids computationally expensive optimizations was developed. A combination of external forces,
adaptive node insertion, and multiresolution strategy was
incorporated in the proposed algorithm. Boundary extraction
with area and volume estimation in left ventricular echocardiographic images was implemented using the B-spline
snake algorithm. The method was implemented in MATLAB
and 50 medical images were used to evaluate the algorithm
performance. Experimental validation was done using a database of echocardiographic images that had been manually
evaluated by experts.
Results Comparison of methods demonstrates significant
improvement over conventional algorithms using the adaptive B-spline technique. Moreover, our method reached a
reasonable agreement with the results obtained manually by
experts. The accuracy of boundary detection was calculated
M. Marsousi
K.N. Toosi University of Technology, Tehran, Iran
e-mail: marsousi@psp.ir
A. Eftekhari
Colorado School of Mines, Golden, USA
A. Kocharian
Tehran University, Tehran, Iran
J. Alirezaie (B)
Ryerson University, Toronto, Canada
e-mail: javad@ryerson.ca
with Dice’s coefficient equation (91.13%), and the average
computational time was 1.24 s in a PC implementation.
Conclusion In sum, the proposed method achieves satisfactory results with low computational complexity. This
algorithm provides a robust and feasible technique for echocardiographic image segmentation. Suggestions for future
improvements of the method are provided.
Keywords Echocardiography · B-spline snake ·
Boundary detection · Left ventricle volume estimation
Introduction
Echocardiography is an efficient and noninvasive imaging
technique that has found numerous applications in medical
centers. Some vital quantities and medical decisions, such
as left ventricular volume, ejection fraction, and abnormality in valve motions, are obtained from echocardiography
views. Therefore, successful feature extraction from cardiac
echo images has become a major research interest, which
essentially requires endocardial boundary detection in left
ventricle (LV) [1]. This is, however, mainly impeded by two
major concerns: (1) Echocardiographic images are often contaminated by significant amount of noise. (2) Endocardial
boundaries lack even contrast, which is in part due to the
attenuation of ultrasonic waves in the patient’s body.
There exists a vast literature on endocardial boundary
detection and several approaches such as Markovian random fields [2], active appearance models [3], watersheds and
wavelet descriptors [4,5], and active contours [6–14] have
been utilized to overcome the inherent difficulties. Among
several available approaches, active contours, introduced by
Kass et al. [15], have shown remarkable performance and reasonable computational complexity. In fact, active contours,
123
502
as a boundary-based approach, have found widespread applications in medical image segmentation. The basic idea is to
define an energy minimizing curve that is constrained by its
own internal forces of continuity and curvature and external
forces that drives it towards desired image features. Few of
the most relevant techniques are reviewed here. The reader
is referred to [8] for a comprehensive review on these techniques. In [16], to estimate the endocardial boundary in a
sequence of echo images, genetic algorithm has been used
for optimization of the active contour. More specifically,
low-pass filtering and morphological operations were used
to define an initial estimate of the contour. Then, a nonlinear mapping of the intensity gradient was used in the energy
functional which is minimized using genetic algorithm. The
final contour was used to initialize contour finding in the next
time frame. On the other hand, in [17] a statistical external
energy has been used for segmentation of echo images. To
this end, a shifted Rayleigh distribution was used to model
gray level statistics, and a multiscale optimization strategy
was adapted to perform energy minimization. Also, in [18],
a Bayesian framework with deformable templates as prior
information has been used to develop a fully automatic unsupervised technique.
Conventional active contour methods typically suffer
from slow convergence speed due to large number of
coefficients to be optimized. An alternative approach is
expressing the curve as a parametric B-spline, which has
built-in smoothness requirement, and hence requires remarkably fewer number of controlling parameters and provides
faster convergence as well as local control [19].
In this paper, a fast and adaptive method for extraction of left ventricular endocardial boundary in echocardiographic images is presented which builds upon conventional
B-spline snake algorithm [20–22]. The proposed method
utilizes novel strategies to efficiently overcome the inherent
difficulties. Instead of pursuing a computationally expensive
optimization-based approach for calculating the curve evolution, a geometrical point of view is used here to address
this problem, which proves to be fast and reliable in our
experiments. In addition, an innovative combination of gradient vector flow [23] and balloon force [24] is employed
to drive the contour towards the boundaries. More specifically, the balloon force provides the drive for the contour
in the homogenous regions far from the boundaries [25]. As
the contour approaches the desired boundaries, balloon force
is gradually replaced with the vector field produced by few
iterations of gradient vector flow (GVF). GVF force then
accurately fits the contour into the desired boundaries. The
proposed combination of external forces significantly speeds
up the convergence. Another notable feature in the presented
framework is that the parameters are determined locally
according to the local image contrast and features. Moreover, in order to further increase the convergence speed and
123
Int J CARS (2010) 5:501–513
robustness against noise, conventional multiresolution strategy has been employed. Consequently, the proposed method
provides improved accuracy among previous achievements
[8,16–18] as well as it reduces the time of computations.
Once boundaries of LV are extracted, we may construct a 3D
model for LV, which then may be used to calculate the volume of LV, as well as ejection fraction ratio, and other vital
quantities. Finally, comparison of these quantities with those
obtained by experts over several test images demonstrates
the efficacy and accuracy of our method.
Parameter estimation from image data
External forces
Referring to the Appendix A, due to the inherent smoothness
and continuity characteristics of B-spline snake, deformation
of the contour is completely determined in interaction with
external forces. In fact, based on the initial location of the
control points, external forces deform the contour from its
initial position to the feature of interest in an image. Typically, GVF plays the role of the external force in the image.
Recall that GVF is iteratively computed as a diffusion of the
gradient vectors of a gray-level or binary edge map derived
from the image. The resultant field has a large capture range,
which means that the active contour can be initialized far
away from the desired boundary. The GVF field also tends to
force active contours into boundary concavities, where traditional snakes have poor convergence. Despite its advantages,
GVF suffers from excessive computational cost, which has
motivated researchers to seek for faster approaches [26]. In
this paper, to obviate the need for excessive computational
cost, an innovative combination of GVF and balloon forces
is employed. Initially, only balloon force provides the drive
for the contour. As the contour approaches the image features, e.g., boundaries, balloon force gradually disappears.
Then, the vector field produced by few iterations of GVF
algorithm dominates and deforms the contour to fit into the
desired boundaries. Our approach is further scrutinized in the
following.
In order to calculate the displacement of node points at
each iteration, we shall consider the contribution of external
forces on the adjacent curve segments. In particular, in cubic
B-spline snake, accurate calculation of the displacement
of any node point should consider external forces on four
adjacent curve segments. Generally, this necessitates computationally expensive optimization-based approach, which
involves inversion of high-dimensional matrices [27]. In
this paper, however, a geometrical point of view is pursued
to address this issue, which is described in the following.
Clearly, at tth iteration, displacement of each node point is
mainly influenced by external forces on its two neighboring
Int J CARS (2010) 5:501–513
503
curve segments, i.e., gn and gn−1 . More specifically, suppose
each curve segment gn is sampled at M points, denoted by
m
, t), m = 1, . . . , M − 1. Suppose, also, that balloon
gn ( M
m
, t) on the contour are
and GVF forces at each point gn ( M
saved in Fbal , FGVF ∈ M N ×2 , respectively. Now, to calculate the displacement of each node point Pn , we first transmit
the external forces on gn and gn−1 to Pn . This is performed
using a weighted sum of external forces, which aims to weigh
the contribution of sample points close to Pn . Therefore, the
proposed method passes on weighted external forces associated with adjacent curve segments to their common node
point to determine the displacement of the corresponding
node. As demonstrated by experimental results given in Sect.
“Experiments”, this simplifying assumption proves to be reliable. Furthermore, this assumption significantly reduces the
computational cost. The procedure is summarized below.
F̃bal (t) = D · Fbal (t)
(1)
F̃GVF (t) =
⎡ T
b1
⎢0
⎢
D=⎢
⎢·
⎣0
0
(2)
and,
D · FGVF (t)
0 ... ...
bT 0 . . .
·
·
·
. . . bT 0
. . . 0 bT
⎤
b2T
0 ⎥
⎥
· ⎥
⎥
0 ⎦
(3)
As mentioned earlier, B(t) determines the contribution of
the balloon force to the deformation of the contour. This
contribution is dominant when the contour is far from image
features, and gradually diminishes as the contour reaches
salient image features. Let β(n, t) denote the nth diagonal
entry in B(t). Then, β(n, t) is initially set to β(n, 0) = β0 =
KV
M , where K V is experimentally set for each resolution (see
Table 1). Here, the desired transition between the balloon and
GVF forces is realized using the discretized version of the
following equation:
∂ f GVF,⊥ 2
∂ f GVF,⊥ 2
∂β(n, t)
+
= −k
∂t
∂n
∂t
subject to β(n, t) ≥ 0
(9)
where f GVF,⊥ (n, t) denotes the normal component of GVF
force at nth node. In addition, constant k is experimentally
set to 0.1. Note that, as the contour approaches the image
boundaries, f GVF,⊥ increases and hence, β(n, t) and balloon
force decrease. Also, it should be pointed out that the term
0
Table 1 Scale dependent parameters in the proposed algorithm and
their values
m−1
m = 1, . . . , M
M
(4)
m = M + 1, . . . , 2M + 1
2 − m−1
M
m −1
m −1
b1 (m) = 1 −
and b2 (m) =
, m = 1, . . . , M
M
M
(5)
b(m) =
Calculating B(t)
#
Scale
KV
M
Maximum iterations
1
0.25
0.2
10
20
2
0.5
0.5
20
15
3
1
1
40
40
in which F̃bal , F̃GVF ∈ N ×2 contain the balloon and GVF
forces on node points Pn , respectively. Once balloon and
GVF forces at each node point are determined using (1)–(5),
total external force at each node is determined at its most
general form by
F̃ext (t) = B(t) F̃bal (t) + (t) F̃GVF (t)
(6)
where B(t) and (t) are diagonal matrices to be determined
later. Note that the component of total external force which
is tangent to the contour does not contribute to the deformation of the contour hence F̃ext (t) can be replaced by F̃ext,⊥ (t),
which contains the normal component to the contour at every
node point. Now, displacement of each node is determined
in proportion to the total external force on the corresponding
node:
P(t) = F̃ext (t)
(7)
where the proportionality factor is assimilated in B(t) and
(t) introduced in (10). Consequently, displacement of control points is determined as
Q(t) = A−1 P(t)
(8)
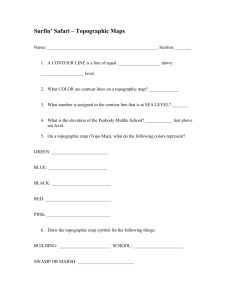
Fig. 1 First row demonstrates the evolution of the B-spline snake
which is modified to handle small gaps, whereas the second row depicts
the conventional B-spline snake which certainly fails to stop at desired
boundary. Note that small gaps, such as the one depicted above, are
widespread in cardiac echo images
123
504
Int J CARS (2010) 5:501–513
Fig. 2 Curve evolution with
(right) and without (left)
reducing the GVF force in the
proximity of the boundaries
∂ f GVF,⊥
∂n
plays an important role in (9). This term is responsible
for not allowing the contour to penetrate inside small gaps,
which potentially degrades the performance of algorithm as
illustrated in Fig. 1. Intuitively speaking, when facing a small
gap, f GVF,⊥ is negligible for at least one node point and has
a considerable value at its adjacent nodes. Hence, the term
∂ f GVF,⊥
will force β(n, t) to decrease. Consequently, contour
∂n
tends to stop at the gap, as desired. While being simple and
primitive, absence of this modification is conventional techniques leads to notable degradation of performance in echo
images in terms of missing the desired boundaries.
Fig. 3 As illustrated above, normal line to the contour along each node
point is processed to obtain the first local maximum, which in turn determines the local threshold on the intensity of the corresponding node
point
Calculating (t)
GVF force drives the contour towards the maximum intensity in the image, which does not necessarily coincide with
the desired boundary. The situation is depicted in Fig. 2.
Therefore, denoting the nth diagonal entry in (t) by γ (n, t),
we need to adaptively reduce γ (n, t) in the proximity of
the boundaries. Similar to β(n, t), γ (n, t) is initially set to
γ (n, 0) = KmV , where K V is experimentally set for each resolution (see Table 1). Then, γ (n, t) changes according to the
discretized version of the following equations:
∂γ (n, t)
= −kY (n)
∂t
M
1 m Y (n) =
− Thn
I gn
M
M
(10)
(11)
m=1
where k is experimentally set to 0.1 in this work and T h n
is the threshold for the LV boundary in the nth segment. In
addition, 0 ≤ I ( p) ≤ 1 denotes the normalized intensity of
the image at point p in the image. To obtain Thn for nth node
point, intensities along the normal line to the contour at nth
node are processed to obtain the first local maximum, which
will be denoted by LMline,n . Then, we have Thn = 21 LMline,n .
This procedure is illustrated in Fig. 3.
123
Node insertion strategy
In order to adaptively approach a complex contour without
a priori fixing of the number of control points, a structure
adaptive node point insertion strategy is developed. At each
iteration, average displacement of all node points is calculated and recorded. New nodes that have been added in the
current iteration do not count. Adaptive threshold on distance
is then computed as follows:
Td (t) =
d(t)
high
·T
max{d(i), i ≤ t} d
d(t)
· Tdlow
+ 1−
max{d(i), i ≤ t}
(12)
where d(t) and Td are average displacement and threshold
on distance at each iteration, respectively, and other two
parameters are selected to fulfill the specific requirements of
high
= 80,
the medical application (here we have set Td
low
Td = 30). The underlying idea of this adaptive threshold
can be described as follows. As soon as a fraction of B-spline
snake reaches the boundary of the object, average displacement of nodes significantly reduces. In this phase, B-spline
snake often requires more nodes to fit into the boundary.
Int J CARS (2010) 5:501–513
505
Fig. 4 Performance of the
proposed algorithm in several
resolutions
80
60
40
20
0
-20
-40
-60
-80
Fig. 5 This figure depicts the longest line connecting any points on the
endocardium of LV, in the apical 4-chambers view. This line is selected
as the common axis for both views
50
0
-50
-50
0
50
Fig. 7 Sample 3D model of LV extracted from patient’s echocardiography images
Fig. 6 Alignment of longest axes of two views and formation of normal planes
Fig. 8 Modified Simpson technique for estimation of the volume of
LV
Hence, distance threshold is decreased to let new nodes to be
added at necessary locations. At each iteration, if the distance
between any two adjacent nodes exceeds the obtained adaptive distance threshold Td (t), a new node is inserted on the
corresponding curve segment at equal distances from both
adjacent nodes.
Automatic contour initialization
Automatic contour initialization is an advantage for algorithms of this type [2]. Here, a simple and effective technique is applied to echo images, which finds an initial contour
based on few training images. In order to reduce the effect of
123
506
Int J CARS (2010) 5:501–513
images for apical 2- and 4- chamber images. For a given cardiac echo image, seed point is placed at the point at which
the correlation of the image and the corresponding template
is maximized. Finally, initial node points are inserted equally
spaced, on the perimeter of a small circle centered at this seed
point.
Vivid 3 imaging instrument
Capture Card
Preview
Manual
Automatic
Boundary
Boundary
detection
detection
Multiresolution strategy
Let us first summarize the proposed algorithm as follows:
LV volume
Comparison of LV
LV volume
estimation
boundaries
estimation
(1) Automatic selection of initial contour.
(2) Compute the vector field produced by few iterations of
GVF algorithm.
(3) Check node insertion conditions and add nodes if
required.
(4) Compute P(t) using (11) and then determine P(t) =
P(t − 1) + P(t).
(5) Use (12) to convert P(t) to Q(t).
(6) Check the convergence criteria.
Comparison of LV
volume
Fig. 9 Block diagram of evaluation process employed in our experiments
noise and unwanted features, wavelet decomposition is performed and a low-resolution version of the original image is
kept. Two templates are then created based on these training
70
Accuracy (%)
Fig. 10 Variation of the
accuracy of boundary detection
at the Scale = 0.25 due to
change of M and K V
As is widely known, exploiting a multiresolution strategy
generally increases the robustness against noise and improves
60
M=5
M=10
M=15
50
40
30
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Fig. 11 Variation of the
computational time of boundary
detection at the Scale = 0.25
due to change of M and K V
Time of Computations (Sec)
Kv
0.2
M=5
M=10
M=15
0.15
0.1
0.05
0
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Kv
83.5
M=5
M=15
M=20
M=30
83
Accuracy (%)
Fig. 12 Variation of the
accuracy of boundary detection
at the Scale = 0.5 due to change
of M and K V . (M = 10 and
K V = 0.2 are considered for
Scale = 0.25)
82.5
82
81.5
81
80.5
80
0
0.5
1
1.5
Kv
123
2
2.5
Fig. 13 Variation of the
computational time of boundary
detection at the Scale = 0.5 due
to change of M and K V .
(M = 10 and K V = 0.2 are
considered for Scale = 0.25)
507
Time of Computations (Sec)
Int J CARS (2010) 5:501–513
0.8
M=5
M=15
M=20
M=30
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
Kv
92
Accuracy(%)
Fig. 14 Variation of the
accuracy of boundary detection
at the Scale = 1 due to change of
M and K V
M=30
M=15
M=40
M=50
90
88
86
84
82
0
0.5
1
1.5
2
2.5
Fig. 15 Variation of the
computational time of boundary
detection at the Scale = 1 due to
change of M and K V
Time of Computations (Sec)
Kv
0.7
M=15
M=30
M=40
M=50
0.6
0.5
0.4
0
0.5
1
1.5
2
2.5
Kv
Fig. 16 Left manually (red)
and automatically estimated
(green) LV endocardial
boundaries in two apical
4-chamber echo images. Right
the overlap between two
boundaries is colored in red
123
508
Int J CARS (2010) 5:501–513
Fig. 17 Application of the
proposed boundary detection
algorithm on few apical
4-chamber echo images. Images
have been cropped for better
visualization
the convergence speed of active contours [28]. To obtain this
multiresolution representation, wavelet decomposition has
been used, which has recently found extensive applications in
123
image processing [29]. The basic principle of wavelet-based
multi-scale object contour extraction is to construct an image
pyramid and to start applying the procedure at the coarsest
Int J CARS (2010) 5:501–513
509
3D Model for LV
Fig. 18 Comparison of Dice’s coefficient and computational cost for
the proposed method, MRF and conventional active contour algorithm
on a database of fifty echo images
level on a low-resolution version of the image. Upon convergence, the solution is propagated to the next finer level as an
initial snake. Then it proceeds with this coarse-to-fine iteration strategy until the finest level of the pyramid (the original
image) is reached. This type of multiresolution approach has
two advantages: In the lower resolution, there are less wavelet coefficients and the B-snake easily deforms to the contour
without much computation and is less interfered by noise. In
higher resolution, with taking advantage of the initial position
of the foregoing resolution, much more computation will be
saved while B-spline snake finely tunes to the boundary [19].
Figure 4 depicts the output of the proposed algorithm in several scales.
Once boundaries in apical 2- and 4- chamber views are identified, we can obtain a 3D model for the LV as follows
[30]. According to cardiac ultrasonic imaging principles, it is
assumed that apical 2-chamber view is almost perpendicular
to the apical 4-chamber view. Therefore, we first find the longest line in each view, as shown in Fig. 5. Two images are then
transformed so that these two lines are aligned. Finally, one
view is rotated to make a right angle with another (Fig. 6). We
may now divide their common axis into segments, to obtain
several parallel planes, each intersecting the boundaries at
four points. Each group of four points, in turn, uniquely forms
a cubic B-spline curve connecting these points together. This,
clearly, gives rise to the desired 3D model for LV, as shown
in Fig. 7.
LV volume estimation
Here, we present a brief review on the algorithm for estimation of LV volume. The volume of LV can be calculated with
the aid of modified Simpson formula [22], which is briefly
described in the following. After finding the boundaries in
apical 2- and 4- chamber images, n points are evenly selected
on the long axis in each view, and then n line segments are
drawn normal to the long axis. In addition, let L denote the
length of main axis and let ai and bi denote the lengths of the
ith line in the apical 2- and 4-chambers planes, respectively,
Table 2 Statistical comparison of several automatic boundary detection algorithms on a database of fifty echo images
Method
Dice’s coefficient (%)
Elapsed time (s)
Mean
Mean
Variance
Variance
Proposed algorithm
91.13
4.96
1.24
0.28
Proposed algorithm without multiresolution strategy
81.80
7.56
1.83
0.28
Conventional parametric active contour [17]
84.91
8.79
3.01
0.55
Markovian random field [2]
88.98
6.57
4.31
0.04
Fig. 19 Apical 4-chambers
view with poor contrast in
endocardium region. The result
obtained with multiresolution
strategy (left) demonstrates
considerable improvement over
result obtained without
multiresolution strategy (right)
123
Difference Ejection Fraction (%)
510
Int J CARS (2010) 5:501–513
Table 3 Similarity and root-mean-square-error of area, volume and
ejection fraction between computer-generated results from proposed
method and obtained results by specialist
15
10
#
5
Name
Similarity (%)
0
-5
-10
-15
30
35
40
45
50
55
60
65
Mean
Variance
93.24
15.71
Root mean
square error
1
Area of LV chamber
1.4891
2
Volume of LV chamber
94.01
13.26
6.8407
3
Ejection fraction
90.65
43.19
4.6250
Average Ejection Fraction (%)
Fig. 20 Demonstrating Bland–Altman plot to compare results of
ejection fraction obtained with proposed method and clinical values
obtained by specialist
1 ≤ i ≤ n (Fig. 8). Then, the volume of LV is estimated as
VLV =
n
L
π
ai bi
4
n
(13)
i=1
where all measurements are in centimeter. To use Eq. (13),
we had to convert the measurements from pixel to centimeter. This was achieved by manually drawing the ratio between
centimeter and pixel in the video output of the echocardiograph. Typically, each centimeter was approximately equal
to 21 pixels in the corresponding image (Fig. 9).
Experiments
In this section, we evaluate the performance of our proposed
approach by comparing both manually obtained boundaries and state-of-the-art automatic boundary extraction
technique. In order to facilitate the evaluation process, a
graphical user interface was developed which enabled the
expert to interactively draw the boundaries. Given the manually obtained boundaries, a well-known similarity measure
was then utilized to quantify the performance of automatic
boundary detection algorithms in comparison with manually
obtained boundaries provided by the expert. Our evaluation
also encompassed comparisons in three other major clinical
decisions, namely area and volume identification and calculation of ejection fraction. This evaluation process is summarized in Fig. 10. Our image database included 50 images
randomly picked from apical 2- and 4- chamber views of
several patients in end of systole (ES) and end of diastole
(ED) phases. All images were obtained from video output
port of a Vivid 3 echocardiography instrument manufactured
by GE using a Pinnacle capture card. Simulations were performed in MATLAB7 environment using an Intel Core 2
Duo, 2.2 GHz processor with 4 GB of memory, and under
Microsoft Windows XP operating system. In addition, CPU
time was used as a rough measure of complexity for algo-
123
rithms. It is also worth noting that, though our software was
optimized in MATLAB, implementation in C++ may further
improve the time efficiency of the algorithm. There are two
important parameters, K V and M, which have a great impression on both the accuracy of boundary detection and the time
of computations. A set of 25 eclectic images was used to
determine a satisfactory combination of these two parameters
for each resolution. In the first step, the best selection of K V
and M for Scale = 0.25 were specified by taking to account
both the accuracy and time of computations (Figs. 10, 11).
Consecutively, same actions were made for Scale = 0.5 and
Scale = 1 by keeping the selections of the parameters in
lower scales (Figs. 12, 13, 14, 15). Finally, the result of these
processes could be seen in Table 1.
Evaluation of the estimated boundaries
In this section, manually and automatically obtained boundaries are compared. In order to quantify the performance of
boundary detection algorithms, the overlap between manually and automatically estimated regions is quantified by
Dice’s coefficient which is defined as
Dice’s coefficient =
2×overlap of two regions
×100
sum of the areas of two regions
(14)
The overlap between automatically and manually obtained
boundaries in two sample echo images is depicted in Fig. 16
to further illustrate the boundary evaluation criterion. Figure 17 demonstrates the performance of the proposed boundary detection algorithm on few sample echo images. In
addition, Fig. 18 and Table 2 provide a comparison between
the proposed method and other automatic algorithms for LV
endocardial boundary detection, in which manually obtained
boundaries offered by the expert have been considered as the
ground truth. It shall be noted that employed conventional
parametric active contour model and Markovian Random
Field labeling method have been implemented based on (but
not exactly identical to) the techniques developed in [17] and
[2], respectively. Finally, to better understand the vital role
Int J CARS (2010) 5:501–513
of multiresolution strategy, Fig. 19 illustrates the effect of
multiscale analysis on a sample echo image.
Estimation of LV volume and area and ejection fraction
Although the Dice’s coefficient defined in (14) is of considerable practical use, specialists take higher consideration in
obtained area of LV, volume of LV, and ejection fraction ratio.
Therefore, the performance of our algorithm was closely
investigated in terms of LV volume and ejection fraction, as
well as its area in different views. To obtain the ground-truth
values, manually obtained boundaries reported by the expert
were fed to the echocardiographic imaging system to calculate the LV volume and area. Given the manually extracted
boundaries of LV, this instrument accurately estimates LV
volume and area in different views. Ejection fraction may
also be estimated from difference of LV volumes at ES and
ED phases. Figure 20 demonstrates the Bland–Altman plot
of ejection fraction ratio to compare the computer-generated
results with obtained results by specialist. Table 3 compares
the ground-truth values for LV volume, area, and ejection
fraction with the results obtained by the proposed algorithm
on several echo images. The similarity percents of area, volume, and ejection fraction are calculated with Eq. 15.
i
n X − Xi 1
(15)
1 − c t s × 100 (%)
Similarity =
n
Xs
511
remarkable properties of GVF together with fast convergence speed. Multiresolution strategy increases the robustness against noise and improves the convergence speed of
active contours. This improvement in speed and accuracy is
demonstrated in Fig. 18 and Table 2. Also note that the proposed method achieves a smaller variance in accuracy over
the database and hence a better stability. Finally, in terms of
calculation of LV volume, ejection fraction, and surfaces in
different views, the proposed method exhibits a remarkable
agreement with the results offered by the expert (Table 3).
Conclusions
where
and X si are results generated by computer and
obtained by specialist for sample ith, and N is equal 50 in
these experiments.
In this paper, we presented a powerful B-spline snake algorithm which is equipped with novel strategies to overcome the
impediments in cardiac echo image processing. The proposed
framework applies a novel combination of external forces
along with adaptive node insertion approach and conventional multiresolution strategy to speed up the convergence
and improve the robustness against speckle noise. Moreover,
due to matching of the parameters associated with each node
point with image’s regional information in the proximity
of that node, the proposed localized parameter estimation
increases the accuracy of the boundary detection.
It is possible to replace the conventional GVF with faster
methods like fast gradient vector flow (FGVF) [31], which
will further reduce the computational complexity of our
algorithm. In addition, extension of the proposed algorithm
may include its application to boundary motion tracking of
sequential heart cycle images.
Discussion
Appendix A: Mathematical model
As inferred from the experimental results, the proposed
method demonstrates reasonable robustness against two
major difficulties in echocardiographic image processing,
i.e., speckle noise and gaps in the boundary. This robustness may be attributed to the novel combination of balloon
force and GVF, which enables the algorithm to enjoy the
An appropriate mathematical model for extraction of left
ventricular endocardial boundaries in apical 2- and 4-chamber images is developed. As mentioned previously, conventional snake method requires calculation of the displacements at every point along the discretized contour, which
is indeed computationally prohibitive. In other words, every
i=1
X ci
Fig. 21 Evolution of control points (green) and node points (red) in a sample echo through four consecutive iterations
123
512
Int J CARS (2010) 5:501–513
iteration of snake algorithm involves optimization of a large
number of parameters, which control the smoothness and
continuity of the contour as well as its interaction with external forces. Most of the excessive computational cost, however, can be avoided by introducing B-spline snake, which
inherently enjoys smoothness and continuity features and
involves fewer parameters compared to the conventional
snake [27,32]. In B-spline snake, the contour is represented
by B-spline basis functions and few control points govern
the deformation of the contour in interaction with image
forces [33]. Among several choices for B-spline basis functions, cubic B-spline snake offers a reasonable compromise
between the complexity of the algorithm and the ability to fit
in to arbitrary boundaries. Cubic B-spline snake is characterized by N control points Q i = [xi , yi ], i = 1, . . . , N and
N connected curve segments gi (s) = [u i (s), vi (s)], where
0 ≤ s < 1. Each curve segment is a linear combination of
four cubic polynomials in s.
gi (s) = [ s 3 s 2 s 1 ] · M
⎤
⎡
Q (i−1) mod N
⎢ Q (i) mod N ⎥
⎥
·⎢
⎣ Q (i+1) mod N ⎦, i = 1, . . . , N
Q (i+2) mod N
(16)
where,
⎡
−1/6
⎢ 1/2
M =⎢
⎣ −1/2
1/6
1/2
−1
−1
2/3
−1/2
1/2
1/2
1/6
⎤
1/6
0 ⎥
⎥
0 ⎦
0
(17)
n
Cubic B-spline snake is now defined as r (s) = i=1
gi (s),
where 0 ≤ s < 1. By setting s = 0 in (16), we obtain the
so-called node points Pi , i = 1, . . . , N , which are located
on the contour and are related to the control points as follows:
P = A·Q
⎡
1/6
⎢0
⎢
⎢·
A=⎢
⎢0
⎢
⎣ 1/6
2/3
2/3
1/6
·
...
0
1/6
1/6
2/3
·
...
...
0
0
1/6
·
0
...
...
...
0
·
1/6
0
...
...
...
·
2/3
1/6
0
⎤
0
0 ⎥
⎥
· ⎥
⎥
1/6 ⎥
⎥
2/3 ⎦
1/6
(18)
(19)
where P, Q ∈ N ×2 and A ∈ N ×N . Node points offer a
more tangible representation of B-spline snakes, and hence
are frequently used in the rest of this paper. Figure 21 demonstrates node points and their relation to control points through
evolution of the contour.
123
References
1. Chen C, Lu H, Huang Y (2002) Cell-based dual snake model: a
new approach to extracting highly winding boundaries in the ultrasound images. Ultrasound in Med Biol 28:1061–1073
2. Mignotte M, Meunier J, Tardif JC (2001) Endocardial boundary
estimation and tracking in echocardiographic images using deformable templates and Markov random fields. Pattern Anal Appl
4(4):256–271
3. Edwards GJ, Taylor CJ, Cootes TF (1998) Interpreting face images
using active appearance models. In Proc Int’l Conf Automatic Face
Gesture Recog, pp 300–305
4. Cheng J, Foo SW, Krishnan SM (2006) Watershed presegmented
snake for boundary detection and tracking of LV in echocardiographic images. IEEE Trans Info Technol Biomed 10(2):414–416
5. Chuang G, Kuo C (1996) Wavelet descriptor of planar curves: theory and applications. IEEE Trans Image Process 5:56–70
6. Park J, Keller JM (2001) snakes on the watershed. IEEE Trans Pattern Anal Mach Intell 23(10):1201–1205
7. Jacob M, Blu T, Unser M (2004) Efficient energies and algorithms for parametric snakes. IEEE Trans Image Process 13:
1231–1244
8. Noble JA, Boukerroui D (2006) Ultrasound image segmentation:
a survey. IEEE Trans Med Imaging 25
9. Jacob G, Alison Noble J, Mulet-Parada M, Blake A (1999) Evaluating a robust contour tracker on echocardiographic sequences.
Med Image Anal 3(1):63–75
10. Malassiotis S, Strintzis MG (1999) Tracking the left ventricle in
echocardiographic images by learning heart dynamics. IEEE Trans
Med Imaging 18(3):282–290
11. Mikic I, Krucinski S, Thomas JD (1998) Segmentation and tracking in echocardiographic sequences: Active contours guided by
optical flow estimates. IEEE Trans Med Imaging 17(2):274–284
12. Chalana V, Linker DT, Haynor DR, Kim Y (1996) A multiple
active contour model for cardiac boundary detection on echocardiographic sequences. IEEE Trans Med Imaging 15:290–298
13. Angelini ED, Laine AF, Takuma S, Holmes JW, Homma S (2001)
LV volume quantification via spatiotemporal analysis of real-time
3-D echocardiography. IEEE Trans Med Imaging 20(6):457–469
14. Comaniciu D, Zhou XS, Krishnan S (2004) Robust real-time myocardial border tracking for echocardiography: an information
fusion approach. IEEE Trans Med Imaging 23:849–860
15. Kass M, Witkin A, Terzopoulos D (1988) snakes: active contour
models. Int J Comput Vis 1(4):321–331
16. Mishra A, Dutta PK, Ghosh MK (2003) A GA based approach for
boundary detection of left ventricle with echocardiographic image
sequences. Image Vis Comput 21:967–976
17. Mignotte M, Meunier J (2001) A multiscale optimization approach
for the dynamic contour-based boundary detection issue. Comput
Med Imaging Graph 25(3):265–275
18. Mignotte M, Meunier J, Tardif J-C (2001) Endocardial boundary estimation and tracking in echocardiographic images using
deformable template and markov random fields. Pattern Anal Appl
4(4):256–271
19. Brigger P, Engel R, Unser M (1988) B-Spline snakes and a JAVA
interface: an Intuitive tool for general contour outlining. ICIP
2:277–281
20. Brigger P, Hoeg J, Unser M (2000) B-spline snakes: a flexible
tool for parametric contour detection. IEEE Trans Image Process
9(9):1484–1496
21. Wang Y, Teoh EK, Shen D (2001) Structure-adaptive B-snake for
segmenting complex objects. In: Proceedings 2001 International
Conference on image processing, vol 2, Issue, 7–10 Oct 2001,
pp 769–772
Int J CARS (2010) 5:501–513
22. Menet S, Saint-Marc P, Medioni G (1990) B-snakes: Implementation and application to stereo. In: Image Understanding Workshop.
Sept., pp 720–726
23. Xu C, Prince JL (1998) Generalized gradient vector flow external
forces for active contours. Signal Process Int J 71(2):131–139
24. Wang M, Evans J, Hassebrook L, Knapp C (1996) A multistage,
optimal active contour model. IEEE Trans Image Process 5:1586–
1591
25. Hill A, Taylor CJ (1997) Automatic landmark identification using
a new method of non-rigid correspondence. In: Proc. Information Processing in Medical Imaging (IPMI’97). Springer, Berlin,
pp 483–488
26. Flickner M, Sawhney H, Pryor D, Lotspiech J (1994) Intelligent
interactive image outlining using spline snakes. In: 28th Asilomar
Conf signals, systems, computers 1:731–735
27. Wang Y, Teoch EK (2006) Object contour extraction using adaptive B-snake model. J Math Imaging Vis 24(3):295–306
513
28. Marsousi M, Eftekhari A, Alirezaie J (2008) Object contour extraction in medical images by fast adaptive B-Snake. 30th Annual
Int Conf of the IEEE Eng in medicine and biology society,
pp 3068–3071
29. Rosenfeld A (1984) Multiresolution image processing. Springer,
New York
30. Liao CW, Medioni G (1995) Surface approximation of a cloud of
3D points. Graph Model Image Process 57(1):67–74
31. Wei M, Zhou Y, Wan M (2004) A fast snake model based on nonlinear diffusion for medical image segmentation. Comput Med
Imaging Graph 28:109–117
32. Wang Y, Teoh EK (2005) Dynamic B-snake model for complex
objects segmentation. Image Vis Comput 23:1029–1040
33. Leung CC, Chan CH, Chan FHY, Tsui WK (2004) B-spline snakes
in two stages Pattern Recognition, 2004. ICPR 2004. In: Proceedings of the 17th International Conference on vol 1, Issue, 23–26
Aug. 2004, pp 568–571
123