Two parabolic equations for propagation in layered poro-elastic media Adam M. Metzler
advertisement

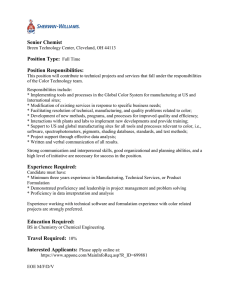
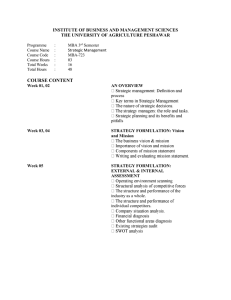
Two parabolic equations for propagation in layered poro-elastic media Adam M. Metzlera) Applied Research Laboratories, The University of Texas at Austin, Austin, Texas 78713-8029 William L. Siegmann Rensselaer Polytechnic Institute, Troy, New York 12180 Michael D. Collins Naval Research Laboratory, Stennis Space Center, Mississippi 39529 Jon M. Collis Colorado School of Mines, Golden, Colorado 80401 (Received 10 October 2012; revised 26 March 2013; accepted 9 May 2013) Parabolic equation methods for fluid and elastic media are extended to layered poro-elastic media, including some shallow-water sediments. A previous parabolic equation solution for one model of range-independent poro-elastic media [Collins et al., J. Acoust. Soc. Am. 98, 1645–1656 (1995)] does not produce accurate solutions for environments with multiple poro-elastic layers. First, a dependent-variable formulation for parabolic equations used with elastic media is generalized to layered poro-elastic media. An improvement in accuracy is obtained using a second dependent-variable formulation that conserves dependent variables across interfaces between horizontally stratified layers. Furthermore, this formulation expresses conditions at interfaces using no depth derivatives higher than first order. This feature should aid in treating range dependence because convenient matching across interfaces is possible with discretized derivatives of first order C 2013 Acoustical Society of America. in contrast to second order. V [http://dx.doi.org/10.1121/1.4807826] I. INTRODUCTION The parabolic equation method is accurate and efficient for ocean acoustic propagation when outgoing energy dominates backscattered.1 In many shallow water regions, sediments closely resemble poro-elastic media2–5 for which a parabolic equation formulation is necessary for accurate and efficient computations of the full wave field. In this paper, two new parabolic equation formulations are derived for layered poro-elastic media. An earlier formulation6 was developed and benchmarked for a single poro-elastic layer, but this approach cannot handle multi-layered environments because the dependent variables are not continuous across horizontal interfaces between two poro-elastic layers. The first new formulation is a natural extension of an elasticmedia dependent variable formulation,7 which has improved accuracy for layered elastic media.8 While the extended formulation improves the original poro-elastic formulation, it still contains a dependent variable that is discontinuous across horizontal interfaces in poro-elastic media. A second new formulation, extending another elastic variable technique,9 is derived with the explicit goal of keeping all dependent variables continuous across horizontal interfaces. This formulation provides accurate and efficient solutions for layered poro-elastic media. Moreover, the approach a) Author to whom correspondence should be addressed. Electronic mail: ametzler@arlut.utexas.edu 246 J. Acoust. Soc. Am. 134 (1), July 2013 Pages: 246–256 removes one potential difficulty associated with the extension necessary for range dependence. In this paper, the description of poro-elastic media follows the standard Biot model,10 which postulates that sediments are composed of porous solids with pores containing flowing fluid. The model treats the individual behavior of the solid and fluid components as well as their coupling, including energy loss from the solid and the fluid viscosity.11,12 Biot-model poro-elastic media support three types of body waves: Fast and slow compressional and shear,13 although other approaches for poro-elastic media may not allow for a slow compressional wave.14 Section II presents the equations of motion using the Biot poro-elastic model and develops the form of parabolic equations for poro-elastic media. In Sec. III, the parabolic equation for the first new dependent variable formulation is derived, and examples are presented for both single and double-layered poro-elastic environments. Section IV derives the second new dependent variable formulation, illustrates the improved accuracy of this formulation for rangeindependent layered environments, and discusses the potential benefits for range-dependent environments. Section V discusses a summary of findings and conclusions. II. PARABOLIC EQUATIONS FOR THE BIOT PORO-ELASTICITY MODEL A generic parabolic equation formulation is developed in this section for poro-elastic media consisting of one or 0001-4966/2013/134(1)/246/11/$30.00 C 2013 Acoustical Society of America V Author's complimentary copy PACS number(s): 43.40.Fz, 43.30.Ma [TFD] more horizontal homogeneous layers. Depth variations in the poro-elastic parameters (sound speeds, densities, etc.) are approximated by such homogeneous and stratified layers, with appropriate conditions at the layer interfaces. Although heterogeneous poro-elastic media can be handled directly, the numerical implementation is cumbersome and is not treated here. A. Biot equations of motion The Biot formulation provides the equations of motion for small displacements in poro-elastic media with the specific development following Ref. 6. Two-dimensional Cartesian coordinates are range x and depth z, with two vectors u ðu; wÞ and uf ðuf ; wf Þ representing the displacements of the porous solid and the fluid. The porosity a is the volume fraction of the medium consisting of pore spaces, and qs and qf correspond to the solid and pore-space fluid densities. The three wave speeds are the fast compressional c1 , slow compressional c2 , and shear c3 . Attenuation is handled by complex wave speeds cj ¼ cj ð1 þ iebj Þ1 for j ¼ 1; 2; 3, where bj is the attenuation for each wave type in decibels per wavelength and ¼ ð40p log10 eÞ1 has units to make the quantity ebj dimensionless. The time-harmonic equations of motion using the Biot model are @rxz @rzz þ þ x2 ð1 aÞqs w þ aqf wf ¼ 0; @x @z @r s g þ qf x2 uf þ U þ ix U ¼ 0; @x a j @r s g þ qf x2 wf þ W þ ix W ¼ 0; @z a j (1) @u þ Cf; @x @u @w rxz ¼ l þ ; @z @x (3) (5) (6) (7) r ¼ CD þ Mf; (8) where J. Acoust. Soc. Am., Vol. 134, No. 1, July 2013 and poro-elastic moduli parameters k, l, C, and M represent medium properties. Equations (1)–(9b) are Biot’s equations of motion for a poro-elastic medium. In this paper poroelastic media are specified by a, s, qf , qs , c1 , c2 , c3 , and the fluid sound speed cw , which under our assumptions are constant. Relationships among these parameters, the four poroelastic moduli, and bulk moduli are found in Appendix A. Substitution of Eqs. (5)–(8) into Eqs. (1)–(4) and using U to eliminate uf results in the system lr2 u þ ðk þ lÞrD þ Crf þ qx2 u þ qf x2 U ¼ 0; (10) CrD þ Mrf þ qf x2 u þ qc x2 U ¼ 0; (11) where q ¼ ð1 aÞqs þ aqf ; qc ¼ (12a) qf ð1 þ sÞ g : þi xj a (12b) For a ¼ 0; Eq. (10) simplifies to the elastic equations of motion.17 Equations (10) and (11) are equivalent to the system described by Eq. (6) in Ref. 18 where H k þ 2l, e D, and w U. To be suitable for the parabolic equation method, Eqs. (10) and (11) must be rewritten in the form @2 (13) K 2 þ L q ¼ 0; @x (4) @w rzz ¼ kD þ 2l þ Cf; @z @u @w þ ; D¼ru @x @z (9b) B. Generic parabolic equations (2) where U ðU; WÞ ¼ aðuf uÞ is relative displacement of the porous medium weighted by porosity, and x is circular frequency. Viscosity g and permeability j correspond to Darcy’s law for flow through a porous medium,15 and s is an added mass correction accounting for pore-space geometry.13 Quantities rxx , rxz , and rzz represent stresses, and r is fluid pressure. Constitutive equations defining the stresses and fluid pressure are16 rxx ¼ kD þ 2l @U @W þ ; @x @z (9a) where q is a vector of dependent variables and matrices K and L contain the poro-elastic parameters and depth operators. The dependent variables ðu; w; U; WÞ do not produce a system of type Eq. (13) because first-order range derivatives occur, so other choices of variables in q must be chosen. For such formulations, Eq. (13) is factored to yield @ @ (14) þ iðK 1 LÞ1=2 iðK 1 LÞ1=2 q ¼ 0; @x @x where factors in Eq. (14) correspond to outgoing and incoming energy. Assuming outgoing energy dominates, the parabolic equation is @q ¼ iðK 1 LÞ1=2 q: @x (15) A solution to Eq. (15) can be written as 1=2 qðx þ Dx; zÞ ¼ eik0 DxðIþXÞ qðx; zÞ; (16) where X ¼ k02 ðK 1 L k02 IÞ, k0 is a reference wave number, and I is the identity operator. Equation (16) marches the solution forward in range by Dx, and the exponential is Metzler et al.: Poro-elastic parabolic solutions 247 Author's complimentary copy @rxx @rxz þ þ x2 ð1 aÞqs u þ aqf uf ¼ 0; @x @z f¼rU III. DEPENDENT VARIABLES q^ 5ðux ; w ; fÞT ~ formulation, like its elastic counterpart q ~ E , may The q be inaccurate for layered poro-elastic environments, because both D and f are not continuous across horizontal interfaces between poro-elastic layers. Guided by success with elastic media, a poro-elastic dependent-variable formulation corre^ ¼ ðux ; w; fÞT , in which ux is ^ E is derived: q sponding to q ^ formulation continuous across these interfaces. The q provides a significant improvement in accuracy and stability ~ for layered poro-elastic environments. over q A. Derivation Following the derivation for elastic media, the first of three equations is obtained by substituting the x-component of Eq. (11) into the x-component of Eq. (10) and taking a range derivative, yielding 2 3 qf qf @ ux @ w þ k þ l C k þ 2l C 2 qc @x qc @x2 @z ! 2 q2f qf @ f @ 2 ux 2 ux ¼ 0: þl 2 þx q þ C M qc @z qc @x2 (17) Substituting the z-component of Eq. (11) into the z-component of Eq. (10) produces the second equation, 248 J. Acoust. Soc. Am., Vol. 134, No. 1, July 2013 l 2 qf qf @2w @ux @ w þ k þ 2l þ k þ l C C qc @z qc @x2 @z2 ! q2f qf @f 2 ¼ 0: (18) wþ C M þx q @z qc qc The third equation is derived by subtracting C=ðk þ 2lÞ times the divergence of Eq. (10) from the divergence of Eq. (11), giving 2 C2 @ f C 2 M q ux þ x q f k þ 2l @x2 k þ 2l 2 C @w C2 @ f q þ M þ x2 qf k þ 2l @z2 k þ 2l @z C q f ¼ 0: þ x2 qc (19) k þ 2l f Equations (17)–(19) have the form of Eq. (13) for dependent ^ with matrices K^ and L^ defined in Appendix B. variables q The interface conditions in Ref. 6 can be expressed in terms ^ variables through substitution of D. In this variable of the q formulation, the conditions contain second-order depth derivatives of some dependent variables. B. Examples In this section, results from three range-independent environments containing poro-elastic media show why it is necessary to use a dependent variable formulation that can handle multiple poro-elastic layers. All environments consist of a fluid layer containing a point source, overlying one or two poro-elastic layers with parameter values in Table I. Environment A is taken from Ref. 6 and demonstrates the ^ (and q ~ ) formulation to handle single poroability of the q elastic layers. Environment B contains two poro-elastic ^ formulation provides a reasonably accurate layers, and the q solution when compared with the benchmark solution. While ^ environment C also contains two poro-elastic layers, the q formulation does not give an accurate solution when compared to the benchmark. For both environments B and C, the ~ solutions are not accurate. The benchmark solutions in q environments B and C are obtained from the wave number integration code OASES.22 Environment A has a 25 Hz point source at a depth of 25 m within a 200 m thick fluid layer overlying a single poro-elastic layer. Transmission loss results at 50 m depth ~ and q ^ formulations. are shown in Fig. 1 for both the q Convergent results are obtained in this example, and in all to follow, in the usual manner for parabolic equation calculations by reducing the horizontal and vertical grid sizes until no differences are visible in transmission loss curves. For this example, the computational steps in the horizontal and vertical are Dr ¼ 20 m and Dz ¼ 2 m, and eight terms are used in the Pade approximation of the exponential in ~ Eq. (16). This example was used in Ref. 6 to show that the q solution agreed with a benchmark. The two solutions are in ^ excellent agreement, illustrating that results from the q Metzler et al.: Poro-elastic parabolic solutions Author's complimentary copy approximated using a Pade approximation.19 Depth operators in X are discretized using Galerkin’s method, and the resulting system is solved by Gaussian elimination. For layered environments, interface conditions are explicitly applied to propagate energy accurately between layers. At a horizontal fluid/poro-elastic interface, conditions correspond to continuity of fluid flow, normal stress, and fluid pressure and vanishing tangential stress. The conditions at an elastic/poro-elastic interface correspond to continuity of horizontal and vertical solid displacements and normal and tangential stresses, and vanishing fluid flow.20 At an air/poro-elastic interface, fluid pressure, normal stress, and tangential stress all vanish. At an interface between two poro-elastic layers, both solid displacements, both stresses, fluid flow, and fluid pressure are all continuous. The original poro-elastic parabolic equation6 used ~ ¼ ðD; w; fÞT a dependent-variable formulation q which exploits a redundant equation in the system Eqs. (10) and (11). As a consequence these equations reduce to a system of three coupled equations having the form of ~ is an extension of the use of Eq. (13). This formulation q ~ E ¼ ðD; wÞT in the initial development of the elastic paraq bolic equation.17,21 For some layered elastic environments, ~ E formulation produces inaccurate solutions because the the q variable D is not continuous across horizontal interfaces.8 Consequently, an elastic parabolic equation employing the ^ E ¼ ðux ; wÞT , where ux @u=@x, was dependent variable q 8 developed and shown to be accurate for layered elastic environments because the variable ux is continuous across ^ E variables to horizontal interfaces. An extension of the q poro-elastic media is presented in Sec. III. TABLE I. Parameters for environments A–C. The parameter qf ¼ 1:0 g/cm3 for all poro-elastic layers. Environment f (Hz) Fluid layer: Upper poro-elastic layer:a Lower poro-elastic layer: B C 25 1500 200 – – – – – – – – – – 0.3 0.0 2.0 2400 1000 1200 0.25 1.0 0.5 200 1500 50 0.3 1.25 1.3 1600 900 400 0.2 5.0 0.4 25 0.2 0.5 1.5 2400 900 500 0.3 2.5 0.5 25 1500 100 0.35 1.0 1.25 1700 800 450 0.1 2.5 0.2 25 0.25 0.5 1.75 1900 850 525 0.25 2.5 0.5 Environment A has no upper poro-elastic layer. formulation are accurate for environments containing a single poro-elastic layer. Environment B features a 200 Hz source at 25 m depth within a 50 m thick fluid layer overlying a 25 m thick poroelastic layer, which overlies a poro-elastic half space. Transmission loss results at 25 m depth are shown in Fig. 2(a), comparing the benchmark solution and the result ~ formulation. The q ~ result is sufficiently different using the q from the benchmark, both in amplitude and pattern phase, that it does not provide an appropriate solution. Figure 2(b) compares transmission loss between the benchmark and the ^ formulation. The q ^ result does very well solution using the q in matching the pattern-phase peak and null locations of the FIG. 1. Transmission loss for environment A at 50 m depth. The dashed curve represents the solution using the q~ formulation, and the solid curve represents the solution using the q^ formulation. J. Acoust. Soc. Am., Vol. 134, No. 1, July 2013 FIG. 2. Transmission loss for environment B at 25 m depth. The dashed curves represent the benchmark solution. The solid curves represent the parabolic equation solution using (a) the q~ formulation, and (b) the q^ formulation. benchmark. While small amplitude discrepancies occur ^ formulation produces a solubetween the two curves, the q tion in reasonable agreement with the benchmark and is ~ solution. significantly improved over the q Environment C contains a 25 Hz source at 75 m depth within a 100 m thick fluid layer overlying a 25 m thick poro-elastic layer, which overlies a poro-elastic half space. Transmission loss results at 75 m depth are depicted in Fig. 3(a), which compares the benchmark solution to the result ~ solution. For this environment, the q ~ solution is difrom the q vergent, and no adjustment of computational parameters produces a convergent solution. [In Fig. 3(a), the number of Pade coefficients is eight, the depth step is 1 m, and the range step is 10 m.] Transmission loss comparisons between the bench^ solution are shown in Fig. 3(b). This mark solution and the q formulation produces a stable solution, but it has significant differences from the benchmark both in amplitude and pattern ^ formulation does not produce an accuphase. Therefore the q rate result for this environment, and an improved poro-elastic dependent variable formulation is needed. There are at least two possible sources for the differences shown in the curves of Fig. 3(b). First, the input parameter structure of the parabolic equation and OASES are different. The parabolic equation requires the sound speeds and Metzler et al.: Poro-elastic parabolic solutions 249 Author's complimentary copy a cw (m/s) Thickness (m) a s qs (g/cm3 ) c1 (m/s) c2 (m/s) c3 (m/s) b1 (dB/k) b2 (dB/k) b3 (dB/k) Thickness (m) a s qs (g/cm3 ) c1 (m/s) c2 (m/s) c3 (m/s) b1 (dB/k) b2 (dB/k) b3 (dB/k) A interfaces. The variables are related to those in a poroacoustic environment23 as well as recent work for elastic media.9 Two new dependent variables C and K are defined C rzz 2l @w C ¼Dþ þ f; k k @z k (20) K r M ¼ D þ f: C C (21) Because C and K are multiples of normal stress and fluid pressure, both of which are required to be continuous across poro-elastic interfaces, they and w are chosen for the de . Consequently, results using pendent variable formulation q should be more accurate for layered poro-elastic environq ^ formulation. ments than the q A. Derivation satisfies a system of equations in the To show that q form of Eq. (13), a derivation similar to that in Sec. III A is useful. The first of three equations is obtained by using Eqs. (20) and (21) in Eq. (10) and subtracting a depth derivative of the z-component of Eq. (10) from a range derivative of its x-component, k FIG. 3. Transmission loss for environment C at 75 m depth. The dashed curves represent the benchmark solution. The solid curves represent the parabolic equation solution using (a) the q~ formulation, and (b) the q^ formulation. H þ 2Ml @ 2 C H þ Ml @ 3 w C2 @ 2 K 2l 4l 2 2 H @x2 H @x H @x @z 2 Mq Cqf @ C C k 2 þ x2 k H @z ! q2f H þ Ml Cl @w 2 þ 2x þ qf q qc H H @z þ2 qf @ 2 K Cq kqf K ¼ 0; C x2 C qc @z2 H (22) where H ¼ Mk C2 . Substitution of Eqs. (20) and (21) into the z-component of Eq. (10) produces the second equation attenuations shown in Table I. In contrast, the benchmark requires the bulk moduli and environmental parameters such as viscosity, permeability, density, and grain size. An outline of the procedure for calculating the physical parameters from the complex sound speeds is given in Appendix A, and further details are in the appendixes of Ref. 6 and in Ref. 22. Because this procedure involves solving a system of nonlinear equations, numerical inaccuracies may be introduced into some parameters. It is possible that for some cases, such as environment A, this source of error is negligible, whereas for others, it may account for observable differences. Another more fundamental reason is the variable f, which like D, is not conserved across interfaces between poro-elastic layers because it contains the depth derivative of the vertical component of a displacement. For accurate solutions in environments containing layered poro-elastic media, it is hypothesized that a variable formulation is needed with all dependent variables continuous across horizontal interfaces between poro-elastic layers. The third equation is derived by substituting a depth derivative of the z-component of Eq. (11) into a horizontal derivative of its x-component, 5ðC; w ; KÞT IV. DEPENDENT VARIABLES q B. Interface grid spacing A second parabolic equation formulation is developed with all dependent variables continuous across horizontal Parabolic equation methods are designed for calculating propagation in range-dependent environments.1 The most J. Acoust. Soc. Am., Vol. 134, No. 1, July 2013 C @2w H þ Ml @C H þ 2Ml @ 2 w l þ k @x2 H ! @z H @z2 2 qf Cl qf @K þ ¼ 0: wC þ x2 q qc H qc @z Mqf Cqc Mqf Cqc @w @2K C 2x2 l þ x2 k 2 H H @x @z Cqf kqc @2K 2 K ¼ 0: þC 2 x C H @z (23) (24) Equations (22)–(24) are in the form of Eq. (13) for with matrices K and L defined in dependent variables q Appendix B. Metzler et al.: Poro-elastic parabolic solutions Author's complimentary copy 250 l widely used method for treating sloping ocean bottoms is the stair-step approximation for which the environment is approximated by a series of range-independent segments.24 Specific conditions are applied to march the solution accurately into the next segment, with two common choices based on energy conservation24–26 and single scattering.27,28 Other approaches for solving sloping bathymetries that avoid stair steps include coordinate rotation29 and mapping solutions,30 but these will not be considered in this paper. While single-scattering methods produce accurate solutions for many elastic propagation problems,31–33 approximate energy-conservation conditions are more convenient numerically for environments containing several types of media, including those in this paper. For any procedure using stairsteps, we discuss below a computational complication that ^ variable formulation, because of secondmay arise for the q order depth derivatives in the horizontal interface condi formulation is that this tions.9 An added advantage of the q complication is avoided. The numerical implementation of horizontal interface conditions are discretized by vj þ vjþ1 ; 2 (25) vj þ vjþ1 dv ; ¼ 2Dz dz z¼zi (26) vj 2vi þ vjþ1 d2 v ¼ ; 2 Dz2 dz z¼zi (27) where vk vðzk Þ is a dependent variable, zi is the interface depth, zj < zi < zjþ1 , and zk kDz with Dz being the depth grid increment. Equations (25) and (26) require v only at grid points, unlike Eq. (27) which requires vi to be known. If zi happens to occur off a grid point, then non-uniform grid spacing is created. This never occurs for range-independent environments when stair-steps are used. However, it can occur for range-dependent environments because vertical interfaces may lead to non-uniform grid spacing. Suppose first that Eq. (27) is required. In Fig. 4(a), advancing left to right across the vertical interface, a depth shift occurs for a grid point on the horizontal interface. For energy-conserving corrections, grid points on both sides of the vertical interface must be associated, and this requirement produces an ambiguity in the circled grid points. In contrast, a variable formulation that requires Eq. (26), as opposed to Eq. (27), does not produce ambiguity, as shown in Fig. 4(b). That is, with grid points not required on the interface, the grid remains uniform throughout the domain, and an energy-conserving correction can be applied. formulaTo show that the interface conditions for the q tion contain no second-order depth derivatives, they are rewritten in terms of C, w, and K. At a poro-elastic/fluid interface, for subscripts P and F denoting poro-elastic and fluid layers, qf C @K k @D 2 1 wþ ¼ ; (28) x qc qc @z P q @z F J. Acoust. Soc. Am., Vol. 134, No. 1, July 2013 FIG. 4. Representation of grid spacing for an environment with a rangedependent interface between layers. Solid line represents an interface, asterisks represent discretized grid points. (a) Variable formulations with secondorder depth derivatives in interface conditions require grid points on the interfaces, producing a locally non-uniform grid and an ambiguity in associating the circled grid points across the interface. (b) Variable formulations with depth derivatives no higher than first order do not require grid points on the interface, creating a uniform grid so that circled grid points are easily associated. fkCgP ¼ fkDgF ; (29) fCKgP ¼ fkDgF ; ( ) ! 2 q q @C @K f f k þ x2 q w C ¼ 0; qc qc @z @z (30) (31) P where D with subscript F is dilatation in the fluid. Conditions at a poro-elastic/solid interface, for subscript E denoting an elastic layer, are (32) fwgP ¼ fwgE ; Mk H þ 2Ml @w C2 k þ 2l @w C K ¼ C ; H H @z H k @z E P (33) fkCgP ¼ fkCgE ; ( ) ! q2f qf @K @C 2 þx q w C k qc qc @z @z P @C þ qx2 w ; ¼ k @z E @K q f x2 w þ C ¼ 0; @z P Metzler et al.: Poro-elastic parabolic solutions (34) (35) (36) 251 Author's complimentary copy vjz¼zi ¼ where C with subscript E has the same form as Eq. (20) with C ¼ 0. Conditions at an air/poro-elastic interface, or an interface between two poro-elastic layers, can be extracted from the poro-elastic terms in the preceding expressions. C. Examples TABLE II. Parameters for environments D and Ei . The parameter qf ¼ 1:0 g/cm3 for all poro-elastic layers. Environment f (Hz) Fluid layer: Upper poro-elastic layer: Lower layer:b cw (m/s) Thickness (m) a s qs (g/cm3 ) c1 (m/s) c2 (m/s) c3 (m/s) b1 (dB/k) b2 (dB/k) b3 (dB/k) Thickness (m) a s qs (g/cm3 ) c1 (m/s) c2 (m/s) c3 (m/s) b1 (dB/k) b2 (dB/k) b3 (dB/k) D Ei 25 1500 100 0.2 0.0 1.3 1700 1250 800 0.1 1.0 0.2 20 0.2 0.0 1.7 2040 1250 950 0.3 5.0 0.5 1000 1500 10 ai a 0.75 2.65 1698.1 1023.3 118.9 0.76 10.18 1.46 1 – – 3.0 2400 – 1200 0.3 – 0.5 a Varies for each i; a1 ¼ 0:4, a2 ¼ 0:2, a3 ¼ 0:02. b Lower layer is poro-elastic for environment D and elastic for environment E. 252 J. Acoust. Soc. Am., Vol. 134, No. 1, July 2013 FIG. 5. Transmission loss for environment B at 25 m depth. The dashed curve represents the benchmark solution, and the solid curve represents the solution using the q formulation. conversions noted at the end of Sec. III B. Next the result formulation. from environment C is obtained using the q Transmission loss at 75 m depth is shown in Fig. 6 for the solution, and the two curves benchmark solution and the q are in excellent agreement over the 5 km propagation range. The amplitude and pattern phase differences depicted in formulation. Fig. 3(b) have been corrected using the q Environment D has a 25 Hz source at 98 m depth within a 100 m thick fluid layer overlying a 20 m thick poro-elastic layer, which overlies a poro-elastic half space. The proximity of the source to the fluid/poro-elastic interface produces an interface wave, which is analogous to a Scholte wave that occurs at a fluid/elastic interface. The interface wave is seen in the transmission loss contours of Fig. 7(a) propagating both above and below the upper interface. The interface wave structure is very similar to that for a Scholte wave near a fluid/elastic interface. The corresponding horizontal wave number spectrum at receiver depth 98 m is shown in Fig. 7(b). The largest peak on the left corresponds to the fast compressional sound speed in the upper poro-elastic layer, FIG. 6. Transmission loss for environment C at 75 m depth. The dashed curve represents the benchmark solution, and the solid curve represents the solution using the q formulation. Metzler et al.: Poro-elastic parabolic solutions Author's complimentary copy In this section, the accuracy of the parabolic equation formulation is described for environments conusing the q taining multiple poro-elastic layers. For single poro-elastic formulayered environments, such as environment A, the q lation produces results of the type in Fig. 1. For multilayered poro-elastic environments, such as environments B are significantly improved when and C, solutions using q ^ formulation, and the results compared to those from the q agree extremely well with benchmarks. Two additional layered poro-elastic environments are also examined with parameter values given in Table II. Environment D shows interface wave propagation, an important feature of seismo-acoustic wave propagation. The final example examines several related environments that are typical in shallow water regions and that contain fluid, elastic, and poro-elastic layers. The influence of varying porosity is explored. formulation. First environment B is revisited using the q Figure 5 compares transmission loss from the benchmark solution at 25 m depth, and the solution and from the q agreement is very good. While there remains slight amplitude differences between the curves, this formulation is a considerable improvement over the result in Fig. 2(b). It is likely that the differences are associated with the parameter FIG. 7. (Color online) Results for environment D. (a) Transmission loss contours near the fluid and upper poro-elastic layer interface display a propagating Scholte-like interface wave. (b) A horizontal wave number spectrum at 98 m depth shows a peak on the right corresponding to the Scholte-like interface wave. J. Acoust. Soc. Am., Vol. 134, No. 1, July 2013 FIG. 8. Transmission loss for environments Ei at 8 m depth. Dashed curves represent the solution for environment E0 where the upper-sediment layer is elastic. Solid curves are solutions for (a) environment E1 with a ¼ 0:4, (b) Environment E2 with a ¼ 0:2, and (c) environment E3 with a ¼ 0:02. disparities between the two solutions indicate that the porous structure of the relatively thin 1 m layer significantly influences the propagation patterns within the fluid. Figures 8(b) and 8(c) compare transmission loss at 8 m depth for environments E2 and E0 and for environments E3 and E0 . These figures are meant to illustrate effects of varying porosity. As porosity in the poro-elastic layer decreases, the solutions exhibit properties closer to the E0 case. In fact propagation Metzler et al.: Poro-elastic parabolic solutions 253 Author's complimentary copy while the peak on the right corresponds to the interface wave. The wave number peak of the interface wave yields a speed of cI 695 m/s. In comparison, Eq. (13) in Ref. 34 gives the speed of a Scholte wave for a corresponding elastic layer as cSC 654 m/s, which is generally consistent with the interface wave speed for the poro-elastic environment. The final example examines environments Ei , each of which has a 1 kHz source at 5 m depth within a 10 m thick fluid layer overlying a 1 m thick upper-sediment layer, which overlies an elastic half space. Environments Ei , for i ¼ 1; 2; 3, treat the upper-sediment layer as poro-elastic with varying porosities: a1 ¼ 0:4, a2 ¼ 0:2, and a3 ¼ 0:02. Environment E0 treats this layer as purely elastic with parameter values corresponding to analogous ones of the poro-elastic cases: cp ¼ c1 , cs ¼ c3 , bp ¼ b1 , bs ¼ b3 , and q ¼ qs . The parameter values for the poro-elastic layer in environment E1 are taken from the Biot parameters of the Applied Research Laboratories, The University of Texas at Austin (ARL:UT) sand tank.35 Figure 8(a) compares transmission loss at 8 m depth for environments E1 and E0 . The results for environments with poro-elastic layers having decreasing porosities approach smoothly to the result from environment E0 . This situation contrasts sharply with the transition of elastic layers to a fluid by decreasing shear speeds, which leads to numerical stability issues because of singularities. Kr ; Kb Kr 1 a 1 Kr Kf Kb C¼M 1 ; Kr V. CONCLUSION k¼ ACKNOWLEDGMENTS Work supported by the Office of Naval Research, and for the first author by an Ocean Acoustics Graduate Traineeship Award and through the Internal Research and Development program of the Applied Research Laboratories at The University of Texas at Austin. APPENDIX A: PORO-ELASTIC PARAMETER CONVERSION In this appendix, relations are presented among the complex wave speeds, the poro-elastic moduli, and the physical bulk parameters. The complex wave speeds are used in the input structure for the parabolic equation, the poro-elastic moduli are used in the equations of motion, and the bulk parameters are used in the input structure of the benchmark code OASES. The six relevant equations are6 c23 ¼ 254 lqc ; E J. Acoust. Soc. Am., Vol. 134, No. 1, July 2013 (A1) (A2) (A3) C2 2 þ Kb l; M 3 (A4) F ; E (A5) c21 þ c22 ¼ c21 c22 ¼ G ; E (A6) where E ¼ qqc q2f ; (A7) F ¼ qM þ qc ðk þ 2lÞ 2qf C; (A8) G ¼ ðk þ 2lÞ M C2 : (A9) The complex quantity Kb is the bulk modulus of the porous frame formed by the sediment grains. The real quantities Kr and Kf are the bulk moduli of the sediment grains and the fluid. It is assumed that the pore spaces are filled with fluid and that qf and Kf are known. Equations (A1)–(A6) represent six complex nonlinear equations that are equivalent to 12 real nonlinear equations. Given the input requirements for the parabolic equation (the parameters described in Tables I and II), the known quantic j , and ties in Eqs. (A1)–(A6) are Kf , qf , q, a, <½qc , <½ =½ c j , for j ¼ 1; 2; 3. The unknowns in the system of 12 equations are the real and imaginary parts of M, C, k, l, and Kb , the real quantity Kr , and the imaginary part of qc . A method for solving a system of nonlinear equations, such as trust-region dogleg (as used by the fsolve routine in MATLAB), can be used to obtain the unknown poro-elastic moduli and bulk parameters. For an initialization of the method, the lossless case in Eqs. (A1)–(A6) leads to a single quadratic equation for M. Once <½M is known, the remaining real parts can be obtained from Eqs. (A1)–(A6), providing an initialization with zero imaginary values. Conversion from the input parameters for OASES to the input parameters for the parabolic equation is straightforward. The former requires 13 input parameters: qf , Kf , g, qs , Kr , a, j, grain size a, <½l, <½Kb , sediment frame shear attenuation as , sediment bulk attenuation ac , and virtual mass parameter cm ¼ 1 þ s.22 The poro-elastic moduli and qc are obtained from Eqs. (A2)–(A4) and (12b). Then the complex wave speeds are calculated from the square root of Eq. (A1) and sffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi F þ F2 4EG ; (A10) c1 ¼ 2E sffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi F F2 4EG c2 ¼ : (A11) 2E Metzler et al.: Poro-elastic parabolic solutions Author's complimentary copy Two new variable formulations are presented for propagation calculations with the parabolic equation method through poro-elastic media with homogeneous layers. The ^ ¼ ðux ; w; fÞT , is a natural dependent variable first, with q selection based on results for elastic-media parabolic equations. For a single poro-elastic layer, this method produces transmission loss solutions with benchmark accuracy. For environments with multiple poro-elastic layers, the results are mixed. There are significant improvements over the ~ ¼ ðD; w; fÞT formulation, but accuracy is not of benchq mark quality. It is believed that the primary cause is the dependent variable f being discontinuous across interfaces between two poro-elastic layers. ¼ ðC; w; KÞT , is develThe second formulation, with q oped with the goal of using dependent variables that are all continuous across poro-elastic interfaces. Examples show that this leads to excellent accuracy for transmission loss calculations. Furthermore, this formulation contains depth derivatives not higher than first order in conditions at horizontal interfaces between the same or different types of media. This permits a uniform numerical grid throughout range and depth, which is expected to improve accuracy using energy-conserving techniques for problems in rangedependent environments. Moreover, this formulation is able to treat shallow water environments that typically contain interface waves and combinations of fluid, poro-elastic, and elastic layers. Using the variable formulations in this paper, the parabolic equation method is accurate and efficient for solving layered poro-elastic propagation problems. M¼ 2 Cq kqc ‘ 33 ¼ C @ x2 C f : 2 @z H APPENDIX B: OPERATORS OF THE PORO-ELASTIC PARABOLIC EQUATIONS 0 v B K^ ¼ B @0 0 ðv lÞ @ @z l 0 qf 1 M qc C C; A 0 M Cn C (B1) 0 1 @2 2 l þ x u 0 0 C B @z2 B C B 2 qf @ @ @C L^ ¼ B C; v 2 þ x2 u C M B ðv lÞ C @z qc @z @z A @ ^‘ 32 ^‘ 33 ^‘ 31 (B2) where v ¼ k þ 2l ðqf =qc ÞC, n ¼ C=ðk þ 2lÞ, u ¼ q ðq2f =qc Þ, and ^‘ 31 ¼ x2 ðqf qnÞ; (B3) ^‘ 32 ¼ x2 ðqf qnÞ @ ; @z (B4) 2 ^‘ 33 ¼ ðM CnÞ @ þ x2 ðqc qf nÞ: @z2 (B5) formulation, K and L derived from Eqs. (22)–(24) For the q are 0 1 Ml @ C2 2l kw 4l w B HC H @z B C (B6) K ¼ B C; l 0 @ 0 A 0 0 C 0 1 ‘ 11 ‘ 12 ‘ 13 B C Ml @ @2 B ‘ 23 C lw 2 þ x2 u Bk w C L¼B C; @z H @z B C @ A Mqf Cqc Mqf Cqc @ 2 2 2x l xk ‘ 33 H H @z (B7) where w ¼ ðH þ 2MlÞ=H and 2 Mq Cqf ‘ 11 ¼ k @ þ x2 k ; @z2 H " # q2f Ml Cl @ 2 ‘ 12 ¼ 2x þ qf ; q w qc H H @z 2 ‘ 13 ¼ 2 qf C @ x2 C Cq kqf ; qc @z2 H q ‘ 23 ¼ C Cl þ f @ ; H qc @z J. Acoust. Soc. Am., Vol. 134, No. 1, July 2013 (B8) (B9) (B10) (B11) 1 F. B. Jensen, W. A. Kuperman, M. B. Porter, and H. Schmidt, Computational Ocean Acoustics (AIP, New York, 1994), pp. 343–412. 2 R. D. Stoll, “Theoretical aspects of sound transmission in sediments,” J. Acoust. Soc. Am. 68, 1341–1350 (1980). 3 M. Stern, A. Bedford, and H. R. Millwater, “Wave reflection from a sediment layer with depth-dependent properties,” J. Acoust. Soc. Am. 77, 1781–1788 (1985). 4 D. G. Albert, “A comparison between wave propagation in watersaturated and air-saturated porous materials,” J. Appl. Phys. 73, 28–36 (1993). 5 M. Badiey, I. Jaya, and A. H.-D. Cheng, “Propagator matrix for plan wave reflection from inhomogeneous anisotropic poroelastic seafloor,” J. Comp. Acoust. 2, 11–27 (1994). 6 M. D. Collins, W. A. Kuperman, and W. L. Siegmann, “A parabolic equation for poro-elastic media,” J. Acoust. Soc. Am. 98, 1645–1656 (1995). 7 A. J. Fredricks, W. L. Siegmann, and M. D. Collins, “A parabolic equation for anisotropic media,” Wave Motion 31, 139–146 (2000). 8 W. Jerzak, W. L. Siegmann, and M. D. Collins, “Modeling Rayleigh and Stonely waves and other interface and boundary effects with the parabolic equation,” J. Acoust. Soc. Am. 117, 3497–3503 (2005). 9 M. D. Collins and W. L. Siegmann, “Improving the parabolic equation solutions for problems involving sloping fluid-solid interfaces,” J. Acoust. Soc. Am. 127, 1962 (2010). 10 M. A. Biot, “General theory of three dimensional consolidation,” J. Appl. Phys. 12, 155–164 (1941). 11 T. Yamamoto, “Acoustic propagation in the ocean with a poro-elastic bottom,” J. Acoust. Soc. Am. 73, 1587–1596 (1983). 12 P. R. Ogushwitz, “Applicability of the Biot theory. I. Low-porosity materials,” J. Acoust. Soc. Am. 77, 429–440 (1985). 13 M. A. Biot, “Theory of propagation of elastic waves in a fluid-saturated porous solid. I. Low frequency range,” J. Acoust. Soc. Am. 28, 168–178 (1956). 14 A. D. Pierce, W. M. Carey, and M. Zampolli, “Low-frequency attenuation of sound in marine sediments,” in IEEE Oceans 2005 - Europe (2005), Vol. 2, pp. 1270–1275. 15 M. A. Biot, “Generalized theory of acoustic propagation in porous dissipative media,” J. Acoust. Soc. Am. 33, 1256–1264 (1962). 16 M. A. Biot, “Mechanics of deformation and acoustic propagation in porous media,” J. Appl. Phys. 33, 1482–1498 (1962). 17 M. D. Collins, “A higher-order parabolic equation for wave propagation in an ocean overlying an elastic bottom,” J. Acoust. Soc. Am. 86, 1459–1464 (1989). 18 R. D. Stoll and T. K. Kan, “Reflection of acoustic waves at a watersediment interface,” J. Acoust. Soc. Am. 70, 149–156 (1981). 19 M. D. Collins, “A split-step Pade solution for the parabolic equation method,” J. Acoust. Soc. Am. 93, 1736–1742 (1993). 20 M. D. Collins, W. A. Kuperman, and W. L. Siegmann, “Erratum: A parabolic equation for poro-elastic media,” J. Acoust. Soc. Am. 100, 3464 (1996). 21 R. R. Greene, “A high-angle one-way wave equation for seismic wave propagation along rough and sloping interfaces,” J. Acoust. Soc. Am. 77, 1991–1998 (1985). 22 H. Schmidt, OASES Version 3.1 User Guide and Reference Manual (MIT, Cambridge, MA, 2004), pp. 20–21. 23 J. F. Lingevitch and M. D. Collins, “Wave propagation in rangedependent poro-acoustic waveguides,” J. Acoust. Soc. Am. 104, 783–790 (1998). 24 M. D. Collins and E. K. Westwood, “A higher-order energy-conserving parabolic equation for range-dependent ocean depth, sound speed, and density,” J. Acoust. Soc. Am. 89, 1068–1075 (1991). 25 M. D. Collins, “An energy-conserving parabolic equation for elastic media,” J. Acoust. Soc. Am. 94, 975–982 (1993). 26 M. D. Collins and W. L. Siegmann, “A complete energy conservation correction for the elastic parabolic equation,” J. Acoust. Soc. Am. 105, 687–692 (1999). 27 J. T. Goh and H. Schmidt, “A hybrid coupled wave-number integration approach to range-dependent seismoacoustic modeling,” J. Acoust. Soc. Am. 100, 1409–1420 (1996). Metzler et al.: Poro-elastic parabolic solutions 255 Author's complimentary copy The 3 3 matrices K and L containing depth operators and medium parameters depend on the variable formulation ^ formulation, K^ and L^ derived from Eqs. q. For the q (17)–(19) are (B12) M. D. Collins, “A two-way parabolic equation for elastic media,” J. Acoust. Soc. Am. 93, 1815–1825 (1993). 29 D. A. Outing, W. L. Siegmann, M. D. Collins, and E. K. Westwood, “Generalization of the rotated parabolic equation to variable slopes,” J. Acoust. Soc. Am. 120, 3534–3538 (2006). 30 M. D. Collins and D. K. Dacol, “A mapping approach for handling sloping interfaces,” J. Acoust. Soc. Am. 107, 1937–1942 (2000). 31 E. T. K€usel, W. L. Siegmann, and M. D. Collins, “A single-scattering correction for large contrasts in elastic layers,” J. Acoust. Soc. Am. 121, 808–813 (2007). 256 J. Acoust. Soc. Am., Vol. 134, No. 1, July 2013 32 A. M. Metzler, W. L. Siegmann, and M. D. Collins, “Single-scattering parabolic equation solutions for elastic media propagation, including Rayleigh waves,” J. Acoust. Soc. Am. 131, 1131–1137 (2012). 33 M. D. Collins, “A single-scattering correction for the seismo-acoustic parabolic equation,” J. Acoust. Soc. Am. 131, 2638–2642 (2012). 34 G. D. Meegan, M. F. Hamilton, Yu. A. Il’inskii, and E. A. Zabolotskaya, “Nonlinear Stoneley and Scholte waves,” J. Acoust. Soc. Am. 106, 1712–1723 (1999). 35 N. P. Chotiros, “Biot model of sound propagation in water-saturated sand,” J. Acoust. Soc. Am. 97, 199–214 (1995). Metzler et al.: Poro-elastic parabolic solutions Author's complimentary copy 28