Document 13352594
advertisement

16.06 Principles of Automatic Control
Lecture 26
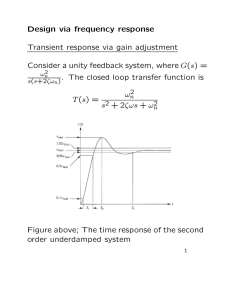
From last time, we had plant and compensator
Gpsq “
1
p1 ` s{0.5qp1 ` sqp1 ` s{2q
Kpsq “ 9
1`s
1 ` s{8
The closed-loop step response has 45% overshoot, when 37% expected. Why?
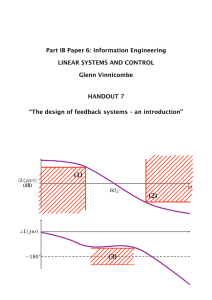
Look at Bode plot of H “
|H|
10
KG
:
p1`KGq
2
Mr predicted by PM
Effective Mr
Magnitude
10
10
10
10
0
−2
−4
−6
10
−1
10
0
ω
10
1
10
2
Because of low Kp , D.C. gain of H is 0.9, which increases effective Mr by factor of 1/0.9.
1
Lag Compensator
Consider the plant
Gpsq “
1
sps ` 10q
In a unity feedback control system
+
G
K
-
Suppose we use a proportional controller
Kpsq “ 141
For this controller,
ωc “10 r/s
PM “45˝
and the overshoot in response to a unit step is
Mp “ 23%
Suppose that we find the response of the closed-loop system satisfactory, except that the
velocity constant Kv “ 14.1 is lower than desired (Kv “ 100). How might we improve the
response?
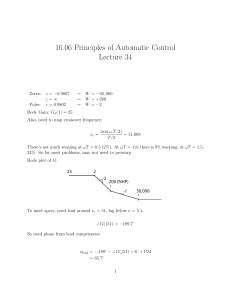
Look at Bode plot:
2
10
4
Modified KG to meet Kv constraint
10
Magnitude
10
3
Kv constraint
2
original KG
10
10
-1
1
0
-2
10
10
−1
−2
10
−2
10
−1
10
0
10
1
10
2
10
3
ω
Placing Kv constrain on Bode plot shows that we must somehow make slope steeper for a
bit to achieve the requirement, if we want crossover behavior to be similar. We do this with
a lag compensator:
s`a
s`b
|.|
0
b
a
b
a
ω
ω
-90
On order to achieve our design goals, we need the lag ratio a{b to be the amount of additional
low frequency gain required. In our case,
a
100
“
“ 7.1
b
14.1
3
We also need
a ! ωc
So that not too much phase lag is added at crossover. It’s common to use
a “ ωc {10
which ensures ă 6˝ of phase lag will be added at crossover.
So the new Compensator is
Kpsq “ 141
s`1
s ` 0.14
How well does the new compensator work? Compare step responses, error response to ramp
inputs (see plots).
1.4
step response with lag
1.2
Step response
1
step response without lag
0.8
0.6
0.4
Note the slightly higher peak overshoot with the lag
filter due to lower phase margin (and also more lag
below crossover).
0.2
0
0
0.5
1
Time, t (sec)
4
1.5
2
0.12
Error to Unit Ramp Input
0.1
0.08
ess=0.07
without lag
0.06
0.04
with lag
0.02
ess=0.01
0
0
0.5
1
1.5
2
2.5
3
3.5
4
Time, t (sec)
Note that although the steady-state error to a ramp input is reduced, there is a long tail to
the response. Why? Look at Root locus:
Im(s)
Re(s)
Long time constant pole near zero.
Pole has small residue, but a long
time constant.
Note the constant pole near lag zero. Pole has small residue, but a long time constant.
This behavior is very typical of systems with lag of PI control. To eliminate, must increase
bandwidth (crossover frequency), which is not always desirable.
5
PI Control
PI (proportional-integral control) is used when the type of the system must be increased,
say, from type 0 to type 1.
Example: Consider a system that performs adequately with unity feedback
+
r
G(s)
1
-
where
Gpsq “ 100
1
,
p1 ` s{1qp1 ` s{200q
but we desire a type 1 system with velocity constant Kv “ 100. Look at problem on Bode
plot:
| • | 10 3
10
10
10
10
Kv constraint
2
original G
1
0
−1
10
−2
10
−1
10
0
ω
So the compensator is
6
10
1
10
2
10
3
Kpsq “
3
s`3
`1“
s
s
Note that error pole will be near s “ ´3. To speed up error response, use
Kpsq “
s ` 10
s
pñ Kv “ 1000q
which will result in pole near s “ ´10.
7
MIT OpenCourseWare
http://ocw.mit.edu
16.06 Principles of Automatic Control
Fall 2012
For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.