A stochastic model of myxobacteria explains several
advertisement

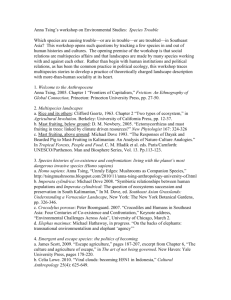
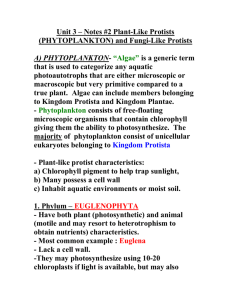
Noname manuscript No. (will be inserted by the editor) A stochastic model of myxobacteria explains several features of myxobacterial motility and development Antony B. Holmes · Sara Kalvala · David E. Whitworth Received: date / Accepted: date Abstract Bacterial populations provide interesting examples of how relatively simple signalling mechanisms can result in complex behaviour of the colony. A well studied model is myxobacteria; cells can coordinate themselves to form intricate rippling patterns and fruiting bodies using localised signalling. Our work attempts to understand and model this emergent behaviour. We developed an off-lattice Monte Carlo simulation of cell motility and show it can be used to generate both rippling and fruiting body formations. Keywords fruiting · Monte Carlo · morphogenesis · myxobacteria · rippling 1 Introduction Myxobacteria are Gram negative, soil dwelling bacteria, distinguished by a complex and social life cycle involving multicellular development [5,6]. In response to starvation, cells pass through several developmental stages over a 72 h period, culminating in the formation of fruiting bodies, large multicellular aggregates of approximately 100,000 cells, within which dormant cell-types called myxospores are formed (Fig. 1). The first of these stages is the rippling phase, occurring approximately 4 h into starvation; the population self-organises into mobile bands of cells, which reflect off one another, giving the appearance of travelling waves [9, 24] (See Fig. 2). It is thought that rippling is an emergent property of an increased reversal frequency, brought about by C-signal, a Antony B. Holmes MOAC Doctoral Training Centre, University of Warwick, Coventry, CV4 7AL, UK E-mail: a.b.holmes@warwick.ac.uk Sara Kalvala Department of Computer Science, University of Warwick, Coventry, CV4 7AL, UK E-mail: Sara.Kalvala@warwick.ac.uk David E. Whitworth Institute of Biological, Environmental and Rural Sciences, Aberystwyth University, Ceredigion, SY23 3DD, UK E-mail: dew@aber.ac.uk 2 membrane bound protein exchanged during cell-cell contact, which modulates the Frz signalling pathway. The Frz pathway is responsible for controlling cell reversals. In this paper we develop an off-lattice model of a myxobacteria population and investigate the dynamics of rippling behaviour. Models of myxobacteria motility tend to fall into one of two categories: those concerned with cell biology [8] and those concerned with physical modelling [23,26,27]. We believe both approaches should be combined to create a model describing the Frz pathway dynamics coupled to a physically realistic model of cell behaviour to study how both systems work together. Combining both approaches helps us validate whether our understanding of both the biology and cell morphology is sufficient to explain spatial phenotypes. In this paper we discuss how rippling fruiting development can be mathematically and computationally modelled and develop a novel three-dimensional, unified model or morphogenesis that can explain both phenomena. Orbiting cells (d) Aggregation Myxospores (c) Streaming Prey bacteria (g) Predation (b) Rippling (a) Vegetative cells (e) Fruiting body formation Myxospores (f) Sporulation Fig. 1 The life cycle of myxobacteria. Cells can engage in cooperative predation (panel g) from a vegetative state (panel a). In response to starvation, cells go through a number of development phases culminating in the formation of fruiting bodies and myxospores (panels b-f ). 2 Background Myxobacteria glide on solid surfaces (they do not swim) using two different motility systems: the “adventurous” A-motility engine and the “social” S-motility engine. Amotility allows individual cells to move out from the colony edge. Cells deposit a slime trail as they move; however, there is some contention over the role of slime [16] although it appears cells can follow the slime trails left by other cells. S-motility is used to coordinate large numbers of cells in close proximity. Cells extend type IV pili from the leading cell pole, which attach to neighbouring cells. Upon retraction of the pili, cells are forced to come together and align. 3 Fig. 2 Magnification of myxobacteria ripple formation on a surface adapted from [19]. The dark bands are areas of densely aligned cells travelling as waves. In response to starvation, cells exchange C-signal, a surface bound protein, upon close contact. The level of C-signal within a cell controls cellular processes such as reversal frequency and is thought to be the primary mechanism cells use to regulate movement [10]. C-signal accumulates within cells up until sporulation [12]. The exchange of C-signal causes a positive feedback cycle that up-regulates C-signal production so the more interactions a cell has, the faster C-signal accumulates and the higher the reversal frequency. Ripples appear to collectively move through each other; however, in reality when ripples collide, cells push into the opposing wave approximately half a cell length before reversing direction [20]. The reversal frequency is a key factor in the formation of spatial patterns. Initially reversal frequency increases, corresponding to the formation of ripples, and subsequently decreases monotonously until sporulation. During starvation, C-signal accumulates within a cell [12] reducing its reversal frequency [10]. By the time cells have reached the fruiting body stage, they are reversing very infrequently. The lack of reversal and the effects of A and S motility causes cells to form streams and increases the likelihood of aggregation; cells which cannot reverse tend to remain stuck in one location since their ability to move around obstacles is limited by only being able to move forward [28]. Fruiting bodies contain between 50,000 and 100,000 cells [17]. Inside the nascent fruiting body, a percentage of the cells differentiate into dormant myxospores. This process requires both temporal and spatial coordination in 3 dimensions making it one of the most complex and least understood phases of the life cycle. There is some disagreement over how fruiting actually begins. The traffic jam model [11, 21, 22] proposes that streams of cells collide together causing the formation of a kernel of stationary cells around which aggregation centres form [9]. Cells orbit around the centre leading to mound formation. Work on Stigmatella suggested that cells form circular orbits around the base and move up in spiral fashion around the base of the stalk building on top of it [7, 25]. O’Connor and Zusman [17, 25] showed that myxobacteria appear to orbit around a largely stationary aggregation centre. Kuner and Kaiser [13] did not observe the spiralling patterns suggesting that this behaviour is nonessential and may not be intrinsically important to fruiting development. Recent work 4 by Curtis et al. did not observe spiralling patterns [4] has revealed that myxobacteria fruits form using a layer building approach similar to a volcanic eruption. Oncoming layers of cells collide causing a rapid build up in pressure at the meeting point. In order to elevate the pressure, cells are forced upwards and over each other similar to tectonic plate movements. The cells that have moved up are supported on top of the highly dense layer of cells and polysaccharide slime underneath and begin to spread out forming a new layer. As the new layer becomes more dense, cells in the centre start to get pushed upwards to start a new layer and the process repeats causing the formation of a stalk. 3 Developing a physical model of rippling and fruiting behaviour In this section we describe how rippling and fruiting can be simulated. An off-lattice Monte Carlo method and the Metropolis algorithm were used to accept or reject state changes [14]. Cells were simulated in a three-dimensional volume, each cell being composed of 8 three-dimensional cuboidal segments (see Fig. 3). Each segment is composed of 27 segment nodes arranged in a cube formation. A small overlap controlled by the stretching energy term of the Hamiltonian is allowed so that the cell maintains a continuous volume despite being made of multiple separate segments (see Fig. 3c). (a) Segment (b) Segment overlap Segment node Fig. 3 Schema of a segmented model cell. Each cell is composed of a number of connected segments with each segment being composed of a number of nodes. (a) Each segment consists of a centre (black dot) and a neighbourhood of lattice nodes that represent the segment volume (grey hexagon). Neighbouring segment centres are a distance d from each other. (b) Threedimensional view of a cell. Each cell has 8 segments: a head (red), a tail (blue) and 6 body segments. Each segment comprises 27 segment nodes in a cube formation. (c) Segments move independently allowing the cell body to be flexible. Overlap between segments allows the cell to maintain a continuous cell volume. 3.1 Simulation volume A simulation volume equivalent to 250 µm × 60 µm × 10 µm was used in rippling simulations to allow multiple ripples to form. The shape and size of fruiting bodies varies greatly; however, a typical mature fruit consisting of a short stalk and mound formation (see the fruiting body formation in Fig. 1 in [13] at the 61 h stage) has a diameter of approximately 100 µm [4,7,11,13]. A simulation volume equivalent to 60 µm × 60 µm × 30 µm was used for all simulations 5 to allow fruiting bodies to develop. The work presented here is concerned with the initial formation of the fruit so a large simulation volume to contain a mature fruit was unnecessary. Periodic boundary conditions are disabled in the xy-plane since it does not make sense for cells to be able to push through the floor nor move through the ceiling since that would imply burrowing through the floor of the next domain and under the existing cells for which there is no physical interpretation. Boundaries are maintained with a boundary energy term which severely penalises a cell for attempting to cross a particular domain boundary. The energy penalty is several orders of magnitude larger than the value any of the other energy terms might produce (positive or negative) so it is impossible for a configuration with a domain crossing to be favourable. 3.2 System Hamiltonian The fruiting model is designed such that cells can revert to other phases of behaviour if conditions change. Cells are not constrained to only attempt fruit formation; their response is dependent on conditions being favourable. In this way we hope to determine a minimal set of behaviours that can lead to fruiting. We define the following Hamiltonian function to describe the system and discuss each energy term in more detail: H = Estretch + Ealign + Ebend + Epropulsion + Eslime + Eclimbing + Egravity + Ecollision + Eadhesion (1) The energy terms were calculated as follows. We use the convention that bold terms denote vector quantities. Terms covered with a hat (ˆ) denote unit vectors. 3.2.1 Stretching energy Myxobacteria cells have a finite volume and fixed shape so we enforce these constraints with a term to measure a cell’s stretching energy. This governs a cell’s length and is analogous to the spring constant in Hooke’s Law. Estretch (a) = λ N −2 X ksa,i+1 − sm,i k − d0 2 (2) i=0 where λ is a dimensionless stretching coefficient, N is the number of segments in cell a, d0 is the optimal distance between segments, sk,l is the vector position of segment l in cell k and λ a dimensionless stretching coefficient. 3.2.2 Alignment energy In close proximity, cells tend to align with each other reflecting the effect of the Smotility engine. Cells extend Type IV pili from their leading pole which grab onto 6 neighbouring cells. Upon retraction this pulls a cell closer to the neighbour it latched onto. The net effect of this is the alignment of cells. Ealign (a) = α · bm ĉ · ê bm = − (ĉm · ê) (3) if (ĉ · ê) ≥ 0, (4) else. sa,1 − sa,N ksa,1 − sa,N k e ê = kek X e= si,1 − si,N ĉ = (5) (6) (7) i neighbours where α is a dimensionless alignment coefficient, ĉ is the normalised average direction of the cell, ê is the average direction of all the cells in a local neighbourhood surrounding cell a. bm reflects that cells tend to turn through the acute angle to align with other cells in either direction. 3.2.3 Bending energy Each cell has a semi-flexible body which must maintain a certain stiffness otherwise the cell folds up upon itself. Bending energy ensures that the radius of curvature of a cell does not exceed a threshold causing the cell to flail uncontrollably. Ebend (a) = σ N X b2a,i (8) i=1 bm,n = dm,n êm,n bm,n+1 if n = 0. bm,n−1 if n = N . dm,n else. = cos−1 êm,n · fˆm,n em,n = kem,n k em,n = sm,n+1 − sm,n fˆm,n fm,n = kfm,n k fm,n = sm,n − sm,n−1 (9) (10) (11) (12) (13) (14) where σ is a dimensionless bending coefficient, dm,n returns the angle between em,n and fm,n , em,n is the average direction of segment n of cell m and fm,n is the vector between the segment ahead of n (sm,n−1 ) and the segment behind (sm,n+1 ). 3.2.4 Propulsion energy The A-motility system provides myxobacteria cells with propulsion. Cells extrude a polysaccharide slime from nozzles at their lagging pole which expands when hydrolysed 7 and pushes a cell forward. This effect is modelled using a propulsion term which causes cells to move preferentially in the average direction of the cell simulating the slime pushing a cell along. Epropulsion (a) = − N X (ûi · ê) (15) i=2 sa,1 − sa,N ksa,1 − sa,N k sa,n−1 − sa,n ûn = ksa,n−1 − sa,n k ê = (16) (17) where is a dimensionless propulsion coefficient, ê is the normalised average direction of the cell and ûn is the update direction of segment n of cell a. Each segment moves towards where its head segment was previously except if this causes segments to become unaligned. 3.2.5 Slime trail following energy As well as extruding slime to move, cells can also detect slime trails left by other cells and preferentially follow them. This allows cells to follow other adventurous cells and leads to the formation of streams that can break away from the main colony. Slime following is complementary to A-motility. As each cell moves, it deposits a slime trail. This is a set of normalised vectors representing the average direction of a cell. The slime ages over time and is eventually removed. Cells can sense slime trails within a limited neighbourhood around them. Using a weighted sum of the all slime trail directions based upon their age, the average slime direction is calculated and cells will preferentially follow that. A weighted sum is used to account for that fact that a cell is more likely to follow a large slime trail than a small one. If a cell was to pick a random slime trail and follow it, it might end up moving perpendicular to the major slime trail which is unrealistic. Eslime (a) = φ b̂a · ĉ sm,1 − sm,N ksm,1 − sm,N k c ĉ = kck X c= slime(i) b̂m = (18) (19) (20) (21) i neighbours slime(m) = tm ktm k (22) where φ is a dimensionless slime following coefficient, ĉ is average direction of the slime trails in a neighbourhood and slime(m) is the normalised direction vector of the slime trail at location m. 8 3.2.6 Climbing energy Curtis et al. [4] propose that when 2 sheets of oncoming cells encounter each other, individual cells have a proclivity to move out of the potential “traffic jam” that can ensue and typically this is upwards so one sheet of cells effectively moves over the other. The energy term described here encourages cells to move upwards proportional to the number of oncoming cells they are interacting with. Eclimbing (a) = −η × cells(a) × dir(a) X cells(a) = collision(a, i) (23) (24) i neighbours collision(a, i) = 1 if dˆa · dˆi ≤ 0, 0 else. sm,1 − sm,N dˆm = ksm,1 − sm,N k dir(a) = r̂a · n̂, (25) (26) (27) where η is a dimensionless climbing coefficient, cells(a) determines the number of oncoming cells, collision(a, i) determines if two cells are moving in opposing directions by examining the dot product between the normalised average direction (dˆm ) of each pair of interacting cells and dir(a) compares the direction cell a wants to move in (r̂a ) with a normal vector (n̂). 3.2.7 Gravitational energy Cells are allowed unrestricted movements in 3 dimensions so we need to control their behaviour in the z-axis. Cells cannot randomly climb into empty space so a notion of gravity is required. The other energy terms do not prevent cells from climbing because they are chiefly describe the cell volume and cell motion in along reasonably straight paths in any dimension. Gravity is represented as a penalty for trying to climb. The steeper the climb the greater the penalty. An object acting under gravity requires the greatest amount of energy to directly oppose the force and move in the opposite direction. The gravitational term rewards a cell for moving downwards. It should be noted that the use of the dot product means that there is no net effect of this term for a cell moving in a straight line in the xy-plane. Since gravity is a constant, there is no change in energy from moving between 2 positions with a direction vector perpendicular to the direction of the force. Egravity (a) = −µ h i b̂a,1 · ĉ · space(da,1 , n) dˆm,n = sm,n − e (28) (29) where µ is a sensitivity parameter, b̂a,1 is the normalised update direction of the head segment, ĉ a normalised direction vector pointing towards the ground, dm,n is a location below the centre of segment n of cell m and n is a local neighbourhood surrounding dm,n . 9 3.2.8 Collision energy Each cell comprises a number of segments each with a finite volume. Segments exert a repulsive force between themselves to prevent cells colliding. Ecollision (a) = τ N X X collision(sa,i , sj,k ) (30) i=1 (j,k) neighbours collision(sa,b , sc,e ) = m if ksa,b − sc,e k < dmin , 0 else. (31) where sa,b is the position of segment b of cell a and dmin is the minimum distance allowed between segments of difference cells. The collision energy compares the distance between a segment and the neighbouring segments sj,k around it and severely penalises a cell for getting too close to another. Although the centres of segments cannot occupy the same space, a small overlap is allowed to model deformation effects of cells in close proximity. This is required because of the rigid segment shape which would otherwise not allow for this type of effect. 3.2.9 Adhesion energy The high density of cells in a swarm and fruiting body means there is a large amount of polysaccharide slime produced which encases all of the cells in a slime matrix [7,17,18]. The slime casing prevents cells coming apart, for example even with a rotary shaker. This matrix affects an adhesive force on the cells making it harder for cells to move apart from each other. Cells typically aggregate at a colony edge due to surface tension effects making it difficult to escape the colony [11]. This effect is separate to the effects of A-motility and is a global property of a large mass of cells. Eadhesion (a) = −ϕ N X X i=2 (j,k) neighbours,j6=a 1 ksa,i − sj,k k2 (32) where ϕ is a dimensionless adhesion coefficient, cells(a) determines the number of oncoming cells, collision(a, i) determines if 2 cells are going in opposing directions by examining the dot product between the normalised average direction (dˆm ) of each pair of interacting cells and dir(a) compare the direction cell a wants to move in (r̂a ) with a normal vector (typically a normal to the xy-plane). 3.3 Simulation algorithm At each time step, the following sequence of operations is performed: 1. Determine cell interactions with neighbouring cells. 2. Update the internal state of the cells. 3. Select a new location for the head node to move to. Each new location is a fixed distance L from the current head position. In three-dimensions this consists centring the head within a sphere and selecting a point on the surface of the sphere as the new location. 10 4. Apply the Monte Carlo algorithm to determine if the head move is energetically favourable. A separate collision resolution algorithm such as that used by Wu et al. [27] is not required since collision avoidance is a natural feature of the Hamiltonian. 5. If the move is favourable, move the head, otherwise repeat steps 1 and 2 F times until a suitable new location is found. If a location cannot be found within F attempts, the cell stalls for the current time step. 6. Repeat steps 7 to 8 F × N times (N is the number of nodes per cell). 7. Choose node i such that i ≤ N at random and move it in the direction from node i to node i + 1 (the head node of i) at a distance of L; 8. Apply the Metropolis algorithm [15] to determine the acceptance probability of making the change. ( P (∆E) = if ∆E ≤ 0, 1 e −∆E/kT if ∆E > 0 (33) 9. Calculate the average direction of the cell from its head to its tail then normalise and write out as the slime vector at the location of the tail. S= sa,1 − sa,N ksa,1 − sa,N k (34) 10. For each cell birth region, test for empty locations. For each spare location, create a new cell 1 segment in size and place it at the spare location. This ensures a constant cell density within the stream. 11. For each cell with a segment size smaller than N , grow the cell by creating a new segment and making it the new tail segment of the cell. Experiments were carried out using the parameters listed in Table 1. Table 1 Parameters for models used to simulate fruiting body formation in Myxococcus xanthus. Name a0 d0 λ α σ ν µ τ kT ns nv vr vf Value 12 √ a0 3.0 2.0 12.0 2.0 1.0 3.0 100.0 0.3 8 27 250 µm × 60 µm × 10 µm 60 µm × 60 µm × 30 µm Description target volume of segment. target distance between adjacent segments. stretching energy parameter. volume energy parameter. bending energy parameter. propulsion energy parameter. gravity energy parameter. gravity energy parameter. collision energy parameter. Boltzmann constant × temperature. Number of segments per cell. Segment volume (number of segment nodes). Dimension of rippling simulation. Dimension of fruiting simulation. 11 2h 8h a) 250 250 225 225 200 200 175 175 150 150 x (µm) x (µm) b) 125 125 100 100 75 75 50 50 25 25 3 6 9 12 15 18 21 Time (minutes) 24 27 30 3 6 9 12 15 18 21 Time (minutes) 24 27 30 Fig. 4 Time evolution of ripple formation in a Monte Carlo off-lattice simulation of 5500 cells in a simulation volume measuring 250 × 40 × 10 µm. Starting from an initial random distribution, cells organise into 3 distinct ripple bands after approximately 4h. (a) Top down view of simulation. (b) Corresponding space-time plot of cell movement in the x dimension during a 30 minute interval measured around the given time point. 4 Results 4.1 Ripple Formation Fig. 4 shows the output from a Monte Carlo simulation of 5500 cells using the Hamiltonian described in Section 3. C-signalling was modelled using a variable phase clock function [2]. Cells were initially randomly distributed and randomly aligned. The emergent behaviour of the system is the formation of 3 ripple bands. In the pre-rippling phase the majority of cells reverse approximately every 10 minutes with a small percentage of cells reversing very quickly (every 4-6 minutes). This corresponds to increased signalling due to the proximity of a large number of randomly oriented cells which collide. A proportion of cells experience many collisions and reverse in 6 minutes or less. A much greater proportion of cells reverse in either 7 or 8 minutes. This can be down to a number of factors. Cells which have climbed over others and are nearer the top level will naturally experience fewer C-signalling events as there will be fewer cells to interact with. Cells nearer the bottom will be more crowded together and are therefore likely to experience more signalling. It might be expected that signalling would be a lot higher initially but two factors limit this: polar sensitivity and traffic jams. C-signalling is thought to only occur at the cell poles, implying signalling does not take place over a large proportion of the cell so even cells in close proximity, actually experience few signalling events. Cells tend to stall in a closely packed environment since there is limited space for them to move. Once a traffic jam forms, cells can get stuck temporarily until they either naturally reverse or the jam disperses. During this waiting time, there is little opportunity for signalling because the position of cell heads relative to each other changes very little. These two factors combined ensure that at a given time, only a small percentage of cells will actually be close enough that their heads interact. There will be always be some cells which receive minimal signalling either from being in a jam or else isolated from other cells. The majority of cells reverse every 7 to 8 minute reflecting that most cells experience some signalling which speeds them up slightly. 12 4.2 Fruiting Sozinova et al. [22] present a three-dimensional lattice gas cellular automata model of rippling formation. Cells are oriented in one of six directions on a hexagonal grid. This of course severely limits the direction cells can move in and any orbiting patterns of cells may be an artefact of this; any alteration in direction is a turn of π/3 rad so cells can move through tight arcs. The rigid cell body also means that the cell must alter its course dramatically. In reality, the partial flexibility of the cell means it does not have to completely alter its course to avoid an obstacle; it can bend slightly to align itself alongside the object and move around it. The model presented here shows that fruiting body development does not require artificial induction with cell density and an upward pushing force being sufficient to instigate formation. Importantly, the polysaccharide slime surround cells must exert an adhesive force, binding cells together. Without this force, cells are too unconstrained and move away from the aggregate. Each layer acts almost independently. Cells from one layer have a much reduced effect on cells in another layer than cells in the same layer. Experiments where all terms in the Hamiltonian were dependent on a local three-dimensional neighbourhood showed that cells cannot move freely due to feeling the effects of cells moving in all directions around them. Consider a scenario where an aggregate has just started to form and a second layer of cells is expanding outwards from the centre. Fruiting development begins after 75 minutes with a small mound formation (see Fig. 5). The mound expands outwards as well as upwards forming a large stabilised stalk base after 400 minutes. There were initially 1600 cells to begin with but the constant influx causes this number to rise to approximately 5000 cells over the duration of the simulation. A heat map is used to indicate the maximum height of cells at a given location; blue regions are relatively sparse with cells only a few layers thick whilst red regions contain many cells stacked on top of each other. The highest region is always towards the centre of the simulation volume indicating that cells do the majority of climbing in this region. There is an accumulation of cells, spreading outwards from the centre in both the x-axis and y-axis. The rate of expansion of the fruit from the centre gradually reduces with time. There appears to be a limit on the size of the fruit, a given number of cells can support. The influx rate appears to be the rate limiting step in controlling fruiting growth; there is a point where the number of cells forming new layers will begin to exceed the number of cells flowing into the system so the development of new layers must be arrested. Fig. 6 shows a three-dimensional view of the fruiting body formation. A layer of cells (light green) covers the floor of the simulation out of which one major and one minor fruiting body (dark green coloured cells) have started to form. The fruit is a continuously altering and changing entity and has drifted towards the edge of the simulation volume (it spans 2 edges due to periodic boundary conditions). 5 Discussion By integrating a simple model of C-signalling with a detailed Hamiltonian capturing the physics of single cell motility, we have created a realistic model of a myxobacteria cell population that can explain how cells self-organise to display multiple different spatial phenotypes. Importantly we have shown that a single unified model is sufficient 13 8 8 7 50 7 50 6 6 40 40 30 4 3 20 5 y ( µ m) x ( µ m) 5 30 4 3 20 2 10 1 50 100 150 200 250 Time (mins) (a) 300 350 400 0 2 10 1 50 100 150 200 250 Time (mins) 300 350 400 0 (b) Fig. 5 Space time plots showing fruiting body formation. Mound formations are coloured by height from 0 µm (blue) to 8 µm (red). (a) Variance of mound height (z-axis) along the x-axis with respect to time. (b) Variance of mound height (z-axis) along the y-axis with respect to time. Fruiting body (a) (b) Fig. 6 Simulation of fruiting body formation after 500 min. Plots are of the same system from different view points. Cells are coloured by height going from light green (lowest) to dark green (highest). A large fruiting body has formed towards the edge of the simulation. Due to periodic boundary conditions, the fruit spans 2 edges of the simulation. to explain multiple behaviours where previously multiple different models were required to explain each state of the life-cycle. The model is able to explain the initial formation of fruiting bodies from streaming cells as a consequence of cell physics and a low reversal frequency. Fruiting bodies will form spontaneously without the need for an artificial aggregation centre to seed the process. We have also shown that observed transitory fruiting body developments before a stable fruiting body forms can be explained as a consequence of net cell influx. 14 We were able to show that even in a dense region, cells do not necessarily experience increasing C-signalling due to the C-signalling mechanism being only at the head and tail of the cell. The small surface area of the C-signalling region implies that either cells are very sensitive to C-signalling if reversals can be triggered in after 4-5 collisions or else C-signalling occurs along more of the body. Mesh based models [1–3] typically restrict the degrees of freedom of cells. Cell flexibility and shape are not really considered; however, we find that these are important physical properties determining cellular behaviour. As ripples form, areas of low cell density develop. Due to the stochastic motion of cells, small perturbations in the travelling direction often lead cells to gradually but significantly alter their course in a low density region with few other cells to interact with. We found that slime serves an essential purpose of maintaining long range cohesion between cells. S-motility is too short range; cells will remain aligned within small clusters but the macroscopic behaviour allows cells to change course leading to the same dispersal problem as with single cells in a low density environment. Ripple formation is dependent on cells remaining aligned to maximise collisions in counter-propagating waves and troughs; if cells drift off course the ripple fronts break down. Our experiments suggest that in a tightly packed population, ripples do not form if a strict monolayer of cells is maintained. When tightly packed, cells have little room to manoeuvre and are frequently obstructed by other cells. Some cells are able to move around obstacles but this is dependent on there being enough space to allow them to change course; however, most cells are very close to each other and cannot avoid stalling. This issue is not addressed in lattice models where cells are typically restricted to moving in fixed planes which reduces the overall number of cells that can actually cause obstruction. Ripples are not a consequence of cells colliding, blocking each other and then reversing as data tracking individual cells showed they typically do not pause for long periods [20]. In highly populated environments aggregation centres are much likely to form but these are not a common artefact during rippling. S-motility and A-motility are not sufficient by themselves to maintain rippling. If cells alter course to avoid objects, their alignment rapidly breaks down into small clusters and the macroscopic alignment is lost. We therefore conclude that cells will ripple in a monolayer provided some cells can climb over others to avoid collision. The model presented here shows that a well characterised model of myxobacteria cell motility can describe both rippling and fruiting. Importantly parameters were kept the same in the two model types showing that cells do not require multiple cellular control systems to display different phenotypes. This validates both the model itself and what is known biologically about myxobacteria. Neither rippling nor fruiting can be explained purely by the function of signalling pathways alone; it is also a direct result of the physical characteristics of the cell. Our work serves as a basis for future models looking at other aspects of the myxobacteria life cycle. References 1. M.S. Alber, M.A. Kiskowski, and Y. Jiang. Two-stage aggregate formation via streams in myxobacteria. Phys.Rev.Lett., 93:1–4, 2004. 2. U. Börner, A. Deutsch, and M. Bär. A generalised discrete model linking rippling pattern formation and individual cell reversal statistics in colonies of myxobacteria. Phys. Biol., 3:138–146, 2006. 3. U. Börner, A. Deutsch, H. Reichenbach, and M. Bär. Rippling Patterns in Aggregates of Myxobacteria Arise from Cell-Cell Collisions. Physical Review, 89:78100–78097, 2002. 15 4. P.D. Curtis, R.G. Taylor, R.D. Welch, and L.J. Shimkets. Spatial organization of Myxococcus xanthus during fruiting body formation. Journal of Bacteriology, 189:9126–9130, 2007. 5. M.E. Diodati, R.E. Gill, L. Plamann, and M. Singer. Initiation and early developmental events. In D.E. Whitworth, editor, Myxobacteria: Multicellularity and Differentiation, pages 43–76. American Society for Microbiology, 2008. 6. M. Dworkin. Recent advances in the social and developmental biology of the Myxobacteria. Microbiological Reviews, 60:70–102, 1996. 7. P.L. Grilione and J. Pangborn. Scanning electron microscopy of fruiting body formation by myxobacteria. Journal of Bacteriology, 124:1558–1565, 1975. 8. O.A. Igoshin, A. Goldbeter, D. Kaiser, and G. Oster. A biochemical oscillator explains several aspects of Myxococcus xanthus behavior during development. Proc. Natl. Acad. Sci. USA, 101:15760–15765, 2004. 9. O.A. Igoshin, R.D. Welch, D. Kaiser, and G. Oster. Waves and aggregation patterns in myxobacteria. Proc. Natl. Acad. Sci. USA, 101:4256–4261, 2004. 10. L. Jelsbak and L. Søgaard-Anderson. The cell surface-associated intercellular c-signal induces behavioral changes in individual Myxococcus xanthus cells during fruiting body morphogenesis. Proc. Natl. Acad. Sci. USA, 96:5031–5036, 1999. 11. D. Kaiser and R.D. Welch. Dynamics of fruiting body morphogenesis. Journal of Bacteriology, 186:919–927, 2004. 12. S.K. Kim and D. Kaiser. C-factor has distinct aggregation and sporulation thresholds during Myxococcus development. Journal of Bacteriology, 173:1722–1728, 1991. 13. J.M. Kuner and D. Kaiser. Fruiting body morphogenesis in submerged cultures of Myxococcus xanthus. Journal of Bacteriology, 151:458–461, 1982. 14. N. Metropolis. The beginning of the monte carlo method. Los Alamos Science, 15:125–130, 1987. 15. N. Metropolis, A.W. Rosenbluth, M.N. Rosenbluth, and A.H. Teller. Equations of state calculations by fast computing machines. Journal of Chemical Physics, 21:1087–1092, 1953. 16. T. Mignot. The elusive engine in Myxococcus xanthus gliding motility. Cell. Mol. Life Sci., pages 1–13, 2007. 17. K.A. O’Connor and D.R. Zusman. Patterns of cellular interactions during fruiting-body formation in Myxococcus xanthus. Journal of Bacteriology, 171:6013–6024, 1989. 18. L.J. Shimkets, M. Dworkin, and H. Reichenbach. The myxobacteria. In M. Dworkin, editor, The Prokaryotes, volume 7. Springer, 2006. 19. L.J. Shimkets and D. Kaiser. Induction of coordinated movement of Myxococcus xanthus cells. Journal of Bacteriology, 152:451–461, 1982. 20. O. Sliusarenko, J. Neu, D.R. Zusman, and G. Oster. Accordion waves in Myxococcus xanthus. Proc. Natl. Acad. Sci. USA, 103:1534–1539, 2006. 21. O. Sozinova, Y. Jiang, D. Kaiser, and M.S. Alber. A three-dimensional model of myxobacterial aggregation by contact-mediated interactions. Proc. Natl. Acad. Sci. USA, 102:11308–11312, 2005. 22. O. Sozinova, Y. Jiang, D. Kaiser, and M.S. Alber. A three-dimensional model of myxobacterial fruiting-body formation. Proc. Natl. Acad. Sci. USA, 103:17255–17259, 2006. 23. J. Starruss, T. Bley, L. Søgaard-Anderson, and A. Deutsch. A new mechanism for collective migration in Myxococcus xanthus. Journal of Statistical Physics, 128:269–286, 2007. 24. R.D. Welch and D. Kaiser. Cell behavior in traveling wave patterns of myxobacteria. Proc. Natl. Acad. Sci. USA, 98:14907–14912, 2001. 25. D.C. White. Myxospore and fruiting body morphogenesis. In M. Dworkin and D. Kaiser, editors, Myxobacteria II. American Society for Microbiology, 1993. 26. Y. Wu, N. Chen, M. Rissler, Y. Jiang, D. Kaiser, and M.S. Alber. CA Models of Myxobacterial Swarming. In Lecture Notes in Computer Science, pages 192–203. Springer-Verlag, 2008. 27. Y. Wu, Y. Jiang, D. Kaiser, and M.S. Alber. Social interactions in myxobacterial swarming. PLoS Computational Biology, 3:2546–2558, 2007. 28. Y. Wu, D. Kaiser, and M.S. Alber. Periodic reversal of direction allows myxobacteria to swarm. Proc. Natl. Acad. Sci. USA, 106:1222–1227, 2009.