Research Journal of Applied Sciences, Engineering and Technology 4(18): 3425-3431,... ISSN: 2040-7467
advertisement
: 3425-3431,... ISSN: 2040-7467")
Research Journal of Applied Sciences, Engineering and Technology 4(18): 3425-3431, 2012
ISSN: 2040-7467
© Maxwell Scientific Organization, 2012
Submitted: April 17, 2012
Accepted: May 18, 2012
Published: September 15, 2012
Micro Calcification Clusters Detection by Using Gaussian Markov
Random Fields Representation
Xinsheng Zhang, Zhengshan Luo and Minghu Wang
School of Management, Xi'an University of Architecture and Technology, Xi'an 710055, China
Abstract: In order to develop an accurate computer-aided diagnosis system for the automatic detection of
microcalcification clusters in mammograms. In this study, we presented a new microcalcification clusters
detection method by using Gaussian Markov Random Fields (GMRFs) representation. The design and
evaluation of the algorithm involved three main phases. In the first phase of the algorithm, a training dataset
is employed to train and get the GMRF texture features of each image block and then the cluster center and bias
are obtained. In the second phase of the algorithm, we use GMRFs to get it texture feature with a given image
block . And finally, the distance between the given image block GMRFs features and the cluster center to make
a decision whether it contains a microcalcification cluster or not.
Keywords: Detection, feature representation, GMRFs, mammograms, mirocalcification clusters
INTRODUCTION
Breast cancer is the most common tumoral disease in
women and is one of the major causes of death among
middle-aged women in developed and developing
countries, with incidences increasingly on the rise in
recent years. Currently, mammographic screenings are
one of the most reliable methods for early diagnosis,
which is crucial for the effectiveness of treatment
methods. In digital mammograms, an important sign of
the early breast cancer is the existence of
Microcalcification Clusters (MCs). One of the key
techniques for early diagnosis of the breast cancer is to
detect MCs and to judge whether they are malignant or
not in mammograms. However, there is only about 3%
information in mammograms, which can be seen with the
naked eye. Due to the most details in mammograms
cannot been perceived by human eyes, it is even very
difficult for an skillful radiologist to find the sign of early
breast cancer, i.e., micalcification clusters, as a result
missing the best time for treatment.
Because one of the very important early signs of
breast cancer is the appearance of Micro calcification
Clusters (MCs), which appear in 30-50% of
mammographically diagnosed cases with tiny bright spots
of different morphology. However, reading X-ray
mammograms is a cumbersome task, because of the small
differences in the image intensity of various breast tissues,
especially for dense images. At present, mammographic
images are visually examined by experts for the detection
of image signs suggesting the presence of a tumor. They
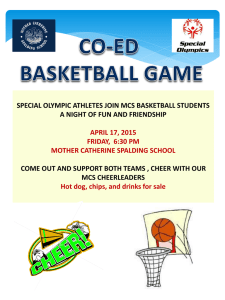
are small calcium deposits that appear as bright spots in
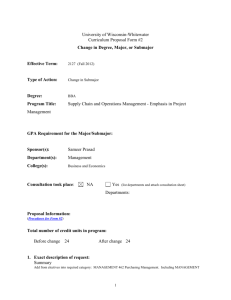
(a)
(b)
Fig. 1: Example of (a) benign microcalcifications and (b)
malignant microcalcifications
a mammogram (Fig. 1) and they may appear as single
spots or they can group to form clusters. Individual MCs
are sometimes difficult to detect due to their variation in
shape, orientation, brightness and size (typically, 0.05-1
mm) and because of the surrounding breast tissue.
Moreover, both the spatial distribution of the MCs into
the cluster and the shape of the MCs are strictly correlated
to the likelihood of the presence of a malignant tumor.
Corresponding Author: Xinsheng Zhang, School of Management, Xi n University of Architecture and Technology, Xi n 710055,
China
3425
Res. J. Appl. Sci. Eng. Technol., 4(18): 3425-3431, 2012
There are several criteria existing to describe the
shape properties of MCs. Among those, one of the best
known is the classification criterion proposed by Brenna
et al., (2009), which introduces five categories. Categories
identify different kinds of MCs and ordered according to
their degree of malignancy. The first type includes Oshaped calcifications and partially calcified ones (tea-cup
calcifications). Type II is composed of regular, round
calcifications with uniform density, while type III
includes calcifications of the same shape and smaller size
than class II. Irregular MCs (salt shaped) with high degree
of malignancy belong to class IV and vermicular-shaped
calcifications, having a very high degree of malignancy,
are identified as type V.
Because of its importance in breast cancer diagnosis,
accurate detection of MCs is an important problem.
Recently, a number of different approaches, which could
assist radiologists in diagnosis of breast cancer, have been
applied for the detection of MCs,. A thorough review of
various methods for MC detection reported in the
literature can be found in Brooks, (1986). In the literature,
several techniques have been proposed to detect the
presence of MCs using various methodologies.
Concerning image segmentation and specification of
Regions of Interest (ROIs), several methods have been
proposed such as classical image filter and local threshold
and techniques based on mathematical morphology,
fractal models (Brooks and Kaupp, 2007), wavelet
analysis and multiscale analysis. Furthermore, various
classification methodologies have been reported for the
characterization of ROI such as, rule-based systems and
fuzzy logic systems (Carmine et al., 2006), statistical
methods based on Markov random fields (Cao and Dai,
2008) and support vector machines (Chella et al., 2010).
Nevertheless, the most work reported in the literature
employs neural networks for cluster characterization
(Lopez et al., 2005). Typically, a neural network accepts
as input features computed for a specific region of interest
and provides as output a characterization of the region as
true MCs or not. While the SVM approach is a powerful
paradigm for pattern classification.
The design and evaluation of the algorithm involved
three main phases. In the first phase of the algorithm, a
training dataset is employed to train and get the GMRF
texture features of each image block and then the cluster
center and bias are obtained. In the second phase of the
algorithm, we use GMRFs to get its texture feature with
a given image block. And finally, the distance between
the given image block GMRFs features and the cluster
center to make a decision whether it contains a
microcalcification cluster or not.
METHODOLOGY
Gaussian Markov random fields:
Conception of Markov ramdom fields: A Markov
random field, Markov network or undirected graphical
model is a set of random variables having a Markov
property described by an undirected graph. A Markov
random field is similar to a Bayesian network in its
representation of dependencies; the differences being that
Bayesian networks are directed and acyclic, whereas
Markov networks are undirected and may be cyclic. Thus,
a Markov network can represent certain dependencies that
a Bayesian network cannot (such as cyclic dependencies);
on the other hand, it can't represent certain dependencies
that a Bayesian network can (such as induced
dependencies).
Defination of Markov ramdom field models: We use
the following notations:
X = {Xs |s,S}
(1)
represents random variables, which are the values of X at
site s, where:
{
S = s = (i , j ) 1≤ i ≤ M ,1 ≤ j ≤ N , i , j , M , N ∈ I
}
(2)
and
x = {xs |s,S}
(3)
are a realization of random variables X.
If we let S be the set of image lattice sites, where M
and N are the image height and width in pixels.
The configuration space for the variable x = {xs|s0S}
is denoted by S, where by:
Ω = ∏Λ s, Λ s ∈ ℜ
(4)
s∈S
For simplicity we may assume a common state space,
7 = {0, 1, 2, ..., L!1}, where, L is the number of grey
levels. an image is modeled by defining each pixel in the
image as a random variable XS, s0S and the grey level
associated with the pixel equal to the value xs. Given that
xs comes form a common state space 7, all possible
images x = {xs|s0S} are then contained within the
configuration space 7L.
Definition 1: A neighborhood system N = {Ns|s0S} is a
collection of subsets of S for which s ∉ N s
and
r ∈ N , ⇔ s ∈ N , Ns are the neighbors of s.
Definition 2: A n-th order neighborhood system is
3426
{
}
N sn = s + r | s + r ∈ N s ,| r |2 ≤ F [ n] where, |r| denotes the
Res. J. Appl. Sci. Eng. Technol., 4(18): 3425-3431, 2012
C
P( X s = xs | X r = xr , r ≠ s) = P( X s = xs | X r = xr , r ∈ N s )
Gaussian Markov ramdom field models: We assume
that the MRF models are discrete models, i.e., the MRF
assumes a discrete set of Values at each lattice site. If X
can be written as:
P( xs | xs+ r , r ∈ N s ) = 1 / 2πσ 2 ,
2
⎧
⎡
⎤ ⎫⎪
⎪
2
exp ⎨ − 1 / 2σ ⎢ xs − µs − ∑ βsr ( xr − µr ) ⎥ ⎬
r ∈S
⎣
⎦ ⎪⎭
⎪⎩
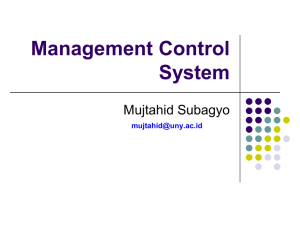
Fig. 2: Neighbor sets for different MRF orders
Euclidian distance between sites s and s+r, F[n] is a
member of the set of all possible integers defined as:
F [ n] = { F [ n ] | F [ n] = i 2 + j 2 , i , j ∈ I , i + j > 0
F [ k ] > F [ l ] ifk > l > 0}
(5)
The fifth order neighborhood system is displayed in
Fig. 2.
Xs = ∑
{
S = s = (i , j )|1 ≤ i , j ≤ M , i , M ∈ I
⎡ B1,1
⎢B
1, M
Bθ = ⎢
⎢ K
⎢
⎢⎣ B1,2
∀ s = (i , j ), s' = (i ' , j ') ∈ S
}
B1, M ⎤
B1,1 K B1, M − 2 ⎥⎥
K
K ⎥
⎥
B1,3 K
B1,1 ⎥⎦
B1,2 K
(9)
(6)
Definition 5: The diameter of a clique c is defined
by:
The matrix B2 is a MN×MN matrix, e is a zero mean,
Gaussian noise process, with autocorrelation given by:
⎧ σ 2 if r = 0
⎪⎪
E [ eses+r ] = ⎨ − θrσ 2 if r ∈ N s
⎪ 0 otherwise
⎪⎩
D(c) = max d ( s, s')
{ s,s'∈c }
2
The order of a clique c is defined by O(c) = D(c)+1 and
the order of a set of cliques is the maximum of the orders
of its elements. Thus a clique composed of a single site is
of order 1 and a clique composed of two adjacent sites is
of order 2.
P(X = x)>0 for all x,Sx, where Sx, is the set of all
possible x on S
(10)
Hence the GRMF can be completely characterized by
the set of parameters {2, F2}. In addition, the parameter
set 2 should satisfy the conditions:
⎧⎪1. θr = θ− r
⎨
T
⎩⎪ 2. 1 − θ φs > 0 ∀ s ∈ S
Definition 6: A random field X ia a Markov Random
Field (MRF) with respect to the neighborhood system N
= { Ns , s,S} if and only if:
C
(8)
Denoting X and e as MM×1 vectors of lexicographic
ordered arrays and Eq. (8) can be rewritten as B2X = e,
where B2 is a block-circulant symmetric matrix:
Consider the usual discrete distance d on the lattice
S. For instance, if S,Z2, we have:
d ( s, s') = i − i ' + j − j '
+ es , Bθ X = e
For a finite lattice, the neighborhood for the lattice
sites at the boundaries of the lattice is not complete. But
this problem is circumvented by assuming that the lattice
is folded into a torrid.
Now we assume that:
Definition 3: A clique c is a subset of S for which every
pair of sites are neighbors.
Definition 4: A clique set C in the neighborhood system
Ns is C = {c | c , Ns}.
r ∈ N sθr X s+ r
(7)
(11)
where Ns is a vector whose length is equal to the number
of elements in the neighbor set Ns. The individual
elements of Ns are given by:
3427
Res. J. Appl. Sci. Eng. Technol., 4(18): 3425-3431, 2012
⎛ ⎛ 2πs1 2πs2 ⎞ ⎛ r1 ⎞ ⎞
cos⎜⎜ ⎜
⎟ ⎜ ⎟ ⎟⎟ r ∈ N s
⎝ ⎝ M N ⎠ ⎝ r2 ⎠ ⎠
(12)
The second condition is necessary to ensure
stationarity and the first to ensure that the covariance
matrix of X is positive definite. The covariance matrix of
e is F2B2 and it can be shown that the covariance of X is
E = F2B2-1. The joint probability density function of X can
be written as follows:
(
P( X = x ) =
Bθ / 2πσ 2
)
MN
2
{
exp −
1
2σ 2
}
x T Bθ x
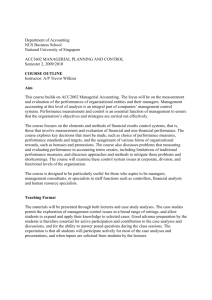
Fig. 3: A second order GRMF neighborhood system
and where N is related to Ns as N = {s:s0Ns}c{-s:s0Ns}.
From above, we can know that:
(13)
E ( e( s), e(r )) = 0,
s≠ r
= v,
s= r
and
(
det Bθ = ∏ 1 − θ T φs
s∈S
)
In view of the Gaussian assumption, Eq. (19) implies
E(e(s)|all y(r), r…s) = 0 which in turn implies:
(14)
p( y( s)|all y(r ), r ≠ s)
Also X exhibits the Markov property:
= P( x s | x s + r , r ∈ N s )
(15)
[
⎧
= 1 / 2πσ exp⎨ − xs − ∑
⎩
r ∈N sθr xs+r
] / 2σ
2
Eq. (19) implies that {y()} is strict sense Markov with
respect to neighbor set N justifying the name Markov.
The unknown parameters 2 = (2rr0Ns) and v can be
estimated using the least squares method as given below:
2⎫
⎬
⎭
The power spectrum Sx(T) of X can be shown to be:
[
S x (ω ) = σ / 1 − ∑
2
(
r ∈N sθr cos
2π
rω
M 1 1
+
2π
rω
M 2 2
)]
θ* =
−1
t
(21)
and
[
]
v * = 1 / M 2 ∑ y( s) − θ *t q( s)
T = {T1, T2}and 0#T1#M!1, 0#T2#N!1
Gaussian Markov random fields based texture
representation:
GMRFs texture model: Assume that the zero mean
observations from the given texture [y(s), 0 S, S = {s =
(i, j):0#i, j#M!1}] are Gaussian and obey the following
difference equation:
∑ θr ( y( s + r ) + y( s − r )) + e( s)
[∑ q(s)q (s)] [∑ q(s) y(s)]
(16)
where,
y( S ) =
(20)
= p( y( s)|all y( s + r ), r ∈ N )
P( xs | xt , ∀ t ≠ s, t ∈ S )
2
(19)
2
(22)
where,
q(s) = col.[y(s+r)+y(s!r), r0Ns]
and the sum is taken oven S1 = S!SB,
where,
{
Ω B = s = (i , j ): s ∈ Ω and ( s + r ) ∉ Ω for at least oner ∈ N
(17)
}
r ∈N s
where the zero mean stationary Gaussian noise sequence
e(S) following properties:
E ( e( s), e(r )) = − θs−r v , ( s − r ) ∈ N
= v,
s= r
= 0,
otherwise
(18)
One can synthesize textures close to the original one
using 2* and v*. Some examples of texture synthesis
using a second-order GMRF model (4 parameters) are
given in Fig. 3.
Now, if we suppose that the center of a neighborhood
system is (0, 0), we can see that the first-order and
second-order GMRF model can be modeled as:
Ns = {(0, 1), (1, 0), (0, !1),(!1, 0)}
3428
(23)
Res. J. Appl. Sci. Eng. Technol., 4(18): 3425-3431, 2012
and
Training
set(including MCs)
⎧⎪ (0,1), (11
, ), (1,0), (1,− 1), (0,− 1),⎫⎪
Ns = ⎨
⎬
, ), (1,0) ⎭⎪
⎩⎪ ( − 1,− 1), ( − 1,0),( − 11
(24)
Compute GMRF texture
feature of each samples
(25)
Including Mcs
The local texture features of an image can be
represented by the following feature vector:
i
i
Compute the distance
between Fi and Fdi
Compute the cluster
center Fdi and bias Ft
respectively. Taking into account the symmetry in a
neighborhood system, we can define its neighbor-hood as:
N s = { r1, r 2, r 3, r 4} = {(0,1), (1,0), (0,− 1), ( − 1,0)}
Testing samples Ii
No
d i= pdstd ?
Yes
Not including Mcs
(
F = ( f1 , f 2 , f 3 , f 4 , f 5 f 6 ) = θr 1 ,θr 2 ,θr 3 ,θr 4 , µ ,σ 2
)
(26)
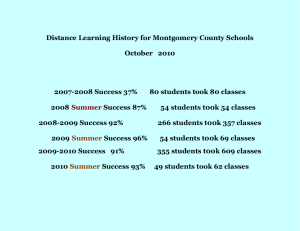
Fig. 4: Block diagram of MCs detection method based on
GMRFs textural feature representation
The partial relevance of natural image is similar to
the no after effects of Markov process in stochastic
process, therefore an image may be regard as GMRF.
Second order GMRF parameters estimation:
Estimating` the parameters of GMRFs is simpler
compared to MRF parameter estimation, because the
partition function can actually be computed. Maximum
likelihood and pseudo likelihood estimation schemes are
commonly used to obtain the least square method. The
maximum pseudo likelihood estimate in the GMRF case
can be obtained in a closed form expression. This estimate
is also called as the least square estimate in the literature.
This estimate is obtained by:
{θ ,σ }
2
MPL
(
= arg max
P x s | x s + r , r ∈ N s ,θ , σ 2
2 ∏
θ ,σ
s∈S
)
(27)
and
⎡
⎤
log ⎢ ∏ P xs | xs+r , r ∈ N s ,θ ,σ 2 ⎥
⎣ s∈S
⎦
(
)
⎤
1 ⎡
MN
⎢
⎥
=−
log σ 2 −
2 xs − ∑ θr xs+r
2
2σ ⎢⎣
⎥⎦
r ∈N s
2
(28)
Now, if qs is the vector containing the elements in the
neighbor set of xs arranged in a proper order, then the
MPL estimate can be obtained as:
−1
⎡
⎤ ⎛
⎦ ⎝
s
s
⎠
⎡
⎤
T
2
σ MPL
= 1/ MN ⎢ ∑ xs2 − θ MPL
∑ q s xs ⎥
⎣
s
(
GMRF model, let qs = xs+ r1 + xs− r1 ,..., xs+ r4 + xs− r4
)
T
and 2 =
(2r, r 0 Ns) is the vector of parameters, we can get 2MPL
and F2MPL, where 2MPL is asymptotic consistency in the
GMRF model parameter estimation. If S is big enough,
the obtained parameters can characterize the GMRF
model. So, we can use there parameters as the texture
features for classification of detection in our context.
MCs detection based on GMRFs texture model: MCs
detection based on the texture features in image texture
analysis can be viewed as a problem of image
segmentation. It makes use the texture feature in each
pixels of local regional to segment textures in an image as
normal region and the region containing calcifications.
This is a commonly used supervised classification
method.
The detection algorithm firstly uses image blocks
including calcification texture for training, so as to get on
with calcification texture of the image feature description
and regard the average of all the blocks feature
descriptions as the clustering center. Given an unknown
category image block, we can make use of the defined
discriminant function to determine whether the pixel
containing MCs or not on behalf of the local texture
features of each pixel so as to get the purpose of MCs
detection. The Block diagram of MCs detection algorithm
based on GMRFs textural feature representation is
illustrated in Fig. 4.
The MCs detection method can be achieved as
follows:
⎞
θ MPL = ⎢ ∑ qsqsT ⎥ ⎜ ∑ qs xs ⎟
⎣
For the parameters estimation in a second-order
s
⎦
(29)
Step 1: Training stage: Given a training set with L
samples containing MCs area, texture features of
each sample can be gotten according to the above
GMRF parameters estimation methods. Then the
features matrix can be obtained as:
3429
Res. J. Appl. Sci. Eng. Technol., 4(18): 3425-3431, 2012
⎡ f11
⎢ 2
⎢ f1
T ⎢
F = K
⎢ L− 1
⎢ f1
⎢ fL
⎣ 1
f 21
f 31
f 41
f 51
f 22
K
f 2L − 1
f 2L
f 32
K
f 3L − 1
f 3L
f 42
K
f 4L − 1
f 4L
f 52
K
f 5L − 1
f 5L
f 61 ⎤
⎥
f 62 ⎥
K ⎥
⎥
f 6L − 1 ⎥
f 6L ⎥⎦
EXPERIMENTAL RESULTS
Using (θr1 ,θr 2 ,θr 3 ,θr 4 ,θr 5 ,θr 6 , µ ,σ 2 , mad ) as the feature
(30)
Let
L
µ j = 1 / L∑ Ft , j ( j = 1,2,...,6) ,
t =1
L
(
σ 2j = 1 / ( L − 1)∑ Ft , j − µ j
t =1
) ( j = 1,2,...,6),
2
([ ])
(31)
µ = mean µ j ,
(
mad = mean abs( x − mean( x ))
)
where : is the cluster center, mad is the maximum
bias.
Step 2: Feature representation: Give a test image block
Ii, the GMRF texture feature parameters are
extracted from the image using the trained GMRF
model.
Step 3: Detection stage: Then the distance to the cluster
center is calculated using the feature vector. If the
distance is greater than the given judgment bias
dstd, then the image is considered to be one of
image block with MCs, otherwise without MCs.
The distance and judgment are defined as:
(
)
d i = d µi , µ =
6
∑
t =1
2
µti − µt , d std = p * σ 2 (32)
respectively, where p is a tunable constant to finetune the scale of decision in detection.
vectors, experiments were carried out to test their
effectiveness in microcalcification clusters detection. A
set of MCs images were manually chosen from the
diagnosed mammographic images (digitized at 50 micron
pixel edge), each available as a 1024 024 digitized picture
with 0-255 gray level from the MIAS Mammographic
Database. From each image, non-overlapping 128 28
image blocks containing MCs were carefully selected
from the image dataset. Thus we selected about 295
blocks with MCs as the GMRF training sample set. No
histogram equalization and other image preprocessing
were done on the images. The mean of each image block
was subtracted and the data was assumed to be a
realization of a 2nd-order GMRF model since it was
adequate enough to estimation the parameters of each
block. A judgment distance classifier using the feature
vectors was designed to perform the MCs decision.
All experiments are performed on a PC with DUO
Intel 2.93G CPU and 2G memory under Windows 7.
MATLAB 2010 is used to implement the proposed
method.
In the experiments we chose 6 image blocks
randomly from the training dataset to perform the GMRF
modeling and GMRF features extraction using 2nd-order
GRMF and the results are shown in Table 1. We first used
295 128 28 image blocks to train the 2nd-order GMRF
model and got a feature matrix with 7 95 dimension and
thus the cluster center of these image blocks was (0.3474,
-0.1672, 0.4278, -0.1531) and the maximum and
minimum distance were max Distance = 0.1621, min
Distance = 0.0025, respectively.
We then used the same 6 image blocks to perform the
GMRF modeling and GMRF features extraction using 3rdorder GRMF and the results are shown in Table 2. We
first used 295 128 28 image blocks to train the 3rd-order
GMRF model and got a feature matrix with 9 95
dimension and thus the cluster center of these image
blocks was (-0.0171, 0.2603, -0.0894, 0.5228, -0.1260, -
Table 1: Training image eature vectors representation using 2nd-order GMRFs
Parameters
21
22
23
24
0.3627
-0.2202
0.4570
-0.1855
Blocks I1
Blocks I2
0.3999
-0.2212
0.4597
-0.2191
Blocks I3
0.3799
-0.2151
0.4547
-0.2102
Blocks I4
0.3878
-0.2086
0.4629
-0.2163
0.3395
-0.1756
0.4699
-0.1940
Blocks I5
Blocks I6
0.3794
-0.1777
0.4527
-0.1544
Table 2: Training image feature vectors representation using 3nd-order GMRFs
21
22
23
24
25
Parameters
Blocks I1
-0.0065
0.1925
-0.0950
0.6111
-0.1716
Blocks I2
-0.0075
0.2686
-0.1231
0.5782
-0.1436
Blocks I3
-0.0036
0.2071
-0.1011
0.6139
-0.1667
Blocks I4
-0.0119
0.2564
-0.1081
0.5953
-0.1376
Blocks I5
-0.0045
0.1864
-0.0832
0.6227
-0.1638
-0.0345
0.3316
-0.1077
0.4782
-0.1125
Blocks I6
3430
µ
2474.9062
2882.2685
3229.9613
2344.7663
2506.8389
3355.8566
26
-0.0767
-0.1243
-0.0969
-0.1310
-0.0902
-0.0878
µ
2474.9062
2882.2685
3229.9613
2344.7663
2506.8389
3355.8566
F2
7174.9230
17020.2024
7470.5424
7181.1996
29731.0852
7988.1600
F2
7174.9230
17020.2024
7470.5424
7181.1996
29731.0852
7988.1600
Mad
26.3895
60.4199
39.2334
30.2259
23.5185
147.4940
Mad
17.3176
40.6361
36.5529
18.9117
-27.5987
157.3489
Res. J. Appl. Sci. Eng. Technol., 4(18): 3425-3431, 2012
Table 3: Computation time using different Neighbor Systems (NS)
NS
Training sampe size
Trainsample number Training time (s)
128×128
295
8
1st
128×128
295
8.8125
2nd
128×128
295
15.5313
3rd
128×128
295
17.3125
4th
128×128
295
18.3281
5th
contains a microcalcification cluster or not by the
judgment distance function. Experimental results that the
proposed method get a good performance for MCs
detection.
0.0787) and the maximum and minimum distance were
max Distance = 0.0967, min Distance = 0.00023,
respectively.
To measure the efficiency of the different order
GMRFs, we also used different neighbor system to
perform the same task. These results are shown in
Table 3.
Finally, to invest the proposed method accuracy, we
performed the following experiment by using 300 test
samples randomly selected from MIAS database, which
contains about 150 positive sample including MCs and
150 negative sample without MCs. Feature vectors of
each test sample were computed and then made a decision
according to the judgment distance function whether it
contains MCs or not. In particular, the proposed method
achieved the averaged positive accuracy of approximately
90.84% with respect to 88.73% negative accurate rate.
The authors wish to thank the helpful comments and
suggestions from my teachers and colleagues in intelligent
detection and control lab of HIT at Weihai. And also
thank Beijing Up-tech to provide part hardware. This
study is supported by the study fund.
CONCLUSION
In this study, we presented a microcalcification
clusters detection method by using Gaussian Markov
Random Fields (GMRFs) representation. The design and
evaluation of the algorithm involved three main phases.
Firstly, a training dataset is employed to train the GMRF
model and get texture features of each image block.
Secondly, we use the trained GMRF model to get it
texture feature with a given image block. And finally, the
distance between the given image block GMRFs features
and the cluster center to make a decision whether it
ACKNOWLEDGMENT
REFERENCES
Brenna, A., C. Sonia, V. Manuela and B. Brett, 2009. A
survey of robot learning from demonstration. Robot.
Auton. Syst., 57: 469-483.
Brooks, R., 1986. A robust layered control system for a
mobile robot. IEEE J. Robotic. Autom., 2(1): 4-23.
Brooks, R. and M. Kaupp, 2007. ORCA: A componment
model and repository. Software Engineering for
Experiment Robotics, pp: 231-251.
Cao, L. and R. Dai, 2008. Fundamentals, Concepts,
Analysis, Design and Beijing implementation., Post
and Telecom Press, China.
Carmine, G., L. Lucio and L. Vincenzo, 2006. Agentbased architecture for designing hybrid control
system. Inform. Sci., 176: 1103-1130.
Chella, A., C. Massimo and G. Salvatore, 2010. Agentoriented software patterns for rapid and affordable
robot programming. J. Syst. Software, 83(4):
557-573.
Lopez, M.E., L.M. Bergasa and R. Barea, 2005. A
navigation system for assistant robots using visually
augmented POMDPs. Auton. Robot., 19(1): 67-87.
3431