Research Journal of Applied Sciences, Engineering and Technology 4(2): 104-107,... ISSN: 2040-7467 © Maxwell Scientific Organization, 2012
advertisement
: 104-107,... ISSN: 2040-7467 © Maxwell Scientific Organization, 2012")
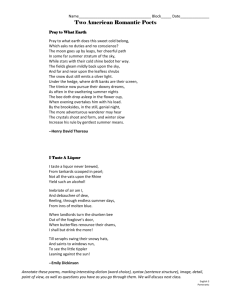
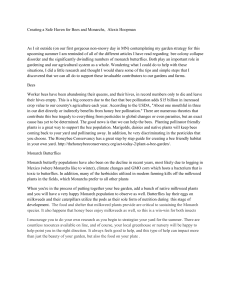
Research Journal of Applied Sciences, Engineering and Technology 4(2): 104-107, 2012 ISSN: 2040-7467 © Maxwell Scientific Organization, 2012 Submitted: September 23, 2011 Accepted: October 24 , 2011 Published: January 15, 2012 Multi-level Threshold Image Segmentation Based on PSNR using Artificial Bee Colony Algorithm 1,2 Cao Yun-Fei, 1Xiao Yong-Hao, 1,2Yu Wei-Yu and 1Chen Yong-Chang 1 School of Electronic and Information Engineering, South China University of Technology Guangzhou, P. R. China 510641 2 Provincial Key Laboratory for Computer Information Processing Technology, Soochow University, Suzhou, Jiangsu 215006, China Abstract: Image segmentation is still a crucial problem in image processing. It hasn yet been solved very well. In this study, we propose a novel multi-level thresholding image segmentation method based on PSNR using artificial bee colony algorithm (ABCA). PSNR is considered as an objective function of ABCA. The multi-level thresholds (t*1, t*2 ,...., t*n-1, t*n) are those maximizing the PSNR. We compare entropy and PSNR in segmenting gray-level images. The experiments results demonstrate proposed method is effective and efficient. Key words: Artificial bee colony algorithm, image segmentation, multi-level threshold, PSNR PSNR is always used for evaluating the quality of the image coding and denoising. However, there is a question, that is, “an the PSNR be applied to image segmentation?” Thus, in this study, we use PSNR to evaluate segmentation results. For developing the efficiency of experiment, we introduced the ABCA to evaluate the PSNR of an image. INTRODUCTION Image segmentation is a very important task in many applications of image processing and computer vision. The fast and accurate image segmentation algorithm is the basis of follow-up target feature extraction, stereo matching, three-dimensional reconstruction and identification. Ostu algorithm (Qidan Zhu et al., 2010) had been widely applied in image processing. 1-D Ostu method considered only grayscale information of a pixel, while 2D Ostu method considered both the gray value of a pixel and the average gray value of its neighborhood. Jiao (Jiao et al., 2006) gave an improved approach of threshold selecting, through the gray level and gradient mapping function. Minimum Cross Entropy (MCE) is developed by (Li and Lee, 1993) as a criterion for determining the thresholds of image segmentation. Sahoo (Prasanna and Arorab., 2004) presented an automatic global thresholding technique based on 2-D Renyi entropy which is determined by using the gray values of the pixels and the local average gray values of the pixels. Swarm intelligence is promising in the field of optimization and researchers have developed a lot of algorithms by simulating the behaviors of swarm of animals and insects such as ants, termites, bees, birds and so on. Karaboga (Karaboga, 2005) proposed a new swarm algorithm called Artificial Bee Colony Algorithm (ABCA) to optimize multi-dimensional and multi-modal problems. (Basturk and Karaboga., 2006) further studied ABCA which was tested on five multi-dimensional benchmark functions. Artificial bee colony algorithm: In ABCA, the foraging bees are classified into three categories mployed, onlookers and scouts. First half of the bee colony is composed of employed bees, whereas the latter half contains the onlookers. The ABCA assumes that there is only one employed bee for every food source. Bees that are currently exploiting a food source are mployed The employed bees bring tons of nectar from the food source to the hive and may share the information on food source with onlooker bees. Scouts are those bees which are currently searching for new food sources in the vicinity of the hive. Onlookers are those bees that are waiting in the hive for the information to be shared by the employed bees about their food sources. The probability Pi of selecting a food source i is determined using Eq. (1): Pi 0.9 f i max f i f i . , i 0,1,..., FN 01 1 , Obji 0 Obji 1 (1) f i 1 Obji , Obji 0 Corresponding Author: Cao Yun-Fei, School of Electronic and Information Engineering, South China University of Technology Guangzhou, 510641-P. R. Chinat 104 Res. J. Appl. Sci. Eng. Technol., 4(2): 104-107, 2012 where, f(i) is the fitness of the solution represented by the food source i, FN is the total number of food sources, and Obj(i) means the objective function value of a new solution. After all onlookers have selected their food sources, each of them determines a food source in the neighborhood of its chosen food source and computes its fitness. If a solution represented by a particular food source does not improve after a predetermined number of iterations (limit) then the food source will be abandoned by its associated employed bee. It becomes a scout, and it will search for a new food source randomly. After the new location of each food source is determined, another iteration of ABCA begins. The process is repeated till the termination condition is satisfied. Formally, suppose each solution consists of D parameters and let Ti = (ti1, ti2, ..., tiD) be a solution with a set of parameter values t1,t2,...,tD. In order to determine a solution Ti the neighborhood of Ti, a solution parameter j and another solution TK = (tk1 , tk2, ..., tkD) are selected randomly. Except for the value of the selected parameter j, all other parameter values of Ti! are same as Ti i.e., Ti! = (Ti1, Ti2, ..., Ti(j-1), Tij, Ti(j+1), ..., TiD). The value Ti! of the selected determined using Eq. (2): Ti!j = Tij + u(Tij - Tkj) t0 , 0 I (i , j ) t1 t1 , t1 I (i , j ) t2 I (i , j ) ..., t D 1 , t D 1 I (i , j ) t D tD , t D I (i , j ) 255 t p i t1 t2 1 p i i t1 ,..., tD 1 255 i. pi i t D 1 t D 1 p i i t D 1 i. p i i tD , tD 255 p i itD where p’i is the probability of gray-level value of an image i . The optimum D-dimensional vector t*1, t*2, ..., t*D–1, t*D which can maximize Eq. (3) is defined in Eq. 5: t*1, t*2, ..., t*D–1, t*D = max (Fp(t1, t2, ..., tD–1, tD )) (5) PSNR-based Artificial Bee Colony Thresholding (PABCT) algorithm: The parameters of PABCT are listed as follows: NP denotes the number of bee colony including employed bees and onlooker bees, FN represents the number of food sources which equals the half of the colony size, FN is the number of cycles, and limit max cycle indicates the number of trials. 2 Set NP = 40, FN = 20, maxCycle = 100, limit =100 (3) Step 1: Initialize population of solutions.Generate food sources. Ti (i = 1, 2, ..., FN) is denoted by matrix in Eq. (6): T = [T1, T2, ..., TFN], Ti ,= (Tí1, Tì2, ..., TiD) (6) where, Tij is the j-th component value of the i-th food source that is restricted into [0, ..., 255] and Tij<Tij+1 for j. The fitness value of all solutions Ti is evaluated and then set cycle = 1 and the trial number of each solution Ti traili = 0. Step 2: Assign the employed bees on their food sources. Each employed bee produces a new solution Ti by using Eq.2. If the fitness of the new solution is better than that of the previous one, the employed bee memorizes the new position and replaces the original one; otherwise, the employed bee retains the original solution. RMSE (t1 , t2 ,... t D 1 , t D ) i , t t D 1 where, RMSE is abbreviation of root mean-squared error, which is defined in Eq. (4). (t1, t2, ..., tD–1, tD) is a vector containing a set of thresholds for segmentation. Î(i,j) denotes the pixel value in the original image (Fig. 1) I, Î(i, and j) and denotes the pixel value in the segmented image. D represents the number of thresholds. 2 i0 t1 1 i Proposed approach: PSNR criterion based measure: When applied to multilevel thresholding image segmentation, the objective function can be defined in Eq. (3): I i, j Ii, j i. p i0 where, u is an uniform varying in [-1, 1]. If the resulting value falls outside the acceptable range for parameter j, it is set to the corresponding extreme value in that range. M N i 1 j 1 i. p i (2) 255 Fp t1 , t2 ,..., t D1 , t D 10 log10 RMSE t2 1 t1 1 (4) MN where, 105 Res. J. Appl. Sci. Eng. Technol., 4(2): 104-107, 2012 Table 1: The experimental results D=2 ---------------------------------------------MEABCT PABCT Threshold/ Threshold/ Original image Entropy PSNR Lena 96,163 91,149 /12.4017 /22.9252 Cameraman 127,192 69,142 /12.1688 /24.3911 Peppers 88,160/ 82,151/ 12.5267 23.7850 D=3 -----------------------------------------EABCT PABCT Threshold/ Threshold/ Entropy PSNR 80,126,175 80,125,169 /15.3913 /25.9406 43,103,192 56,115,154 /15.2274 /26.0619 83,143,197 70,113,169 /15.7724 /25.9947 D=4 ------------------------------------------------MEABCT PABCT Threshold/ Threshold/ Entropy PSNR 63,96,138,179 73,113,145,180 /18.1096 /28.0417 43,96,145,196 41,94,139,169 /18.3955 /27.8797 67,115,158,201 64,97,136,188 /18.6964 /27.5406 D=2 D=3 D=4 D=2 D=3 D=4 D=2 D=3 D=4 Fig1: The original image D=2 D=2 D=2 D=3 D=3 D=3 D=4 D=4 Fig. 3: 2-4 threshold images using MEABCT [0, 1]. If this number is less than Pi , the solution is updated and i is increased by 1. This process is repeated until all onlookers have been distributed to solutions. Step 4: The scout bees randomly research the neighbor area to discover new food sources. Through Steps 2-3, the traili of solution Ti will be increased by 1. If the solution Ti is not better than through Steps 2-3, the solution Ti will be abandoned in case that the traili of solution will be increased by 1. If the traili of solution exceeds the predetermined “limit” the solution Ti is considered to be an abandoned solution. At the same time, the employed bee will be changed into a scout. The scout randomly produces the new solution by Eq. 7, and compares the fitness of new solution with that of its old one. If the new solution is better than the old solution, it will replace the old one and set its own traili into D=4 Fig 2: 2-4 threshold images using PABCT Step 3: Assign onlooker bees to the food sources depending on their amount of nectar. Calculate the probability value Pi of the solution Ti according to their fitness values using Eq. 1. A onlooker bee updates its solution depending on the probabilities and determines a neighbor solution around the chosen one. In the selection procedure for the i-th onlooker (the initial value of i is 1), a random number is produced between 106 Res. J. Appl. Sci. Eng. Technol., 4(2): 104-107, 2012 0. This scout will be changed into an employed bee. Otherwise, the old one is retained in the memory: better segmentation performance from subjectivity. Thus, proposed method is effective and efficient. Our ongoing and further works include adaptive determination for the number of the threshold and faster bee colony algorithm. Tij = Tmin,j + rand(0,1).(Tmax,j–Tmin,j) j = 1, 2, ..., D (7) ACKNOWLEDGMENT where, the Tmin,j and Tmax,j are the minimum and maximum of the j-th component of all solutions, the rand (0, 1) is a function that generates the random number between [0, 1]. Step 5: The best solution is recorded and increases the cycle by 1. Step 6: The algorithm is end if the cycle is equal to the maximum cycle number (max cycle), otherwise go to Step 2. This study is supported by the National Natural Science Foundation of China (Grant No. 60872123, 60972133), the Joint Fund of the National Natural Science Foundation and the Guangdong Provincial Natural Science Foundation (Grant No. U0835001), the Fundamental Research Funds for the Central Universities, SCUT, Provincial Key Laboratory for Computer Information Processing Technology, Soochow University, (Grant No. KJS0922). Experimental results and comparative performance: In this section, we compared proposed approach (PABCT) with the Maximum Entropy Artificial Bee Colony Thresholding algorithm (MEABCT) presented in (Ming-Huwi, 2011). We tested some standard gray-level images using Matlab 2009 software running at a 2.8GHz CPU, 4GHz Memory computer (Table 1). We can evaluate the segmentation results subjectively. It obvious that the contrast between the object and the background is much higher in Fig. 2 than that of Fig. 3. Especially in the results of cameraman, the gray-level of the man and the camera is deeper than that of the background. It is obvious that Lena and Peppers in Fig. 2 is more highlighted. And the segmentation results of PABCT is superior to those of MEABCT. REFERENCES Basturk, B. and D. Karaboga, 2006. An Artificial Bee Colony (ABC) Algorithm for Numeric Function Optimization. IEEE Swarm Intelligence Symposium, USA. Jiao, S., G. Xue and X. Li, 2006. An improved Ostu method for image segmentation. ICSP Proceedings. Karaboga, D., 2005. An Idea Based on Honey Bee Swarm for Numerical Optimization. Technical Report-TR06 (Erciyes University, Computer Engineering Department, Turkey. Li, C.H. and C.K. Lee, 1993. Minimum cross entropy thresholding. Pattern Recognition, 26: 617-625. Ming-Huwi, H., 2011. Multilevel thresholding selection based on the artificial bee colony algorithm for image segmentation. Expert Sys. Appl., 37(6): 4146-4155. Prasanna, K.S. and G. Arorab, 2004. A thresholding method based on 2-D Renyi entropy. Pattern Recognition, 37: 1149-1161. Zhu, Q., L. Jing and R. Bi, 2010. Exploration and improvement of Ostu threshold segmentation algorithm Proceedings of the 8th World Congress on Intelligent Control and Automation. CONCLUSION PSNR is a very important criterion for evaluating the quality of image restruction and de-noising. In this study, we applied PSNR to multi-thresholding image segmentation using ABCA. Furthermore, we compare the proposed PABCT with MEABCT. The experiments results demonstrate that the proposed method provides 107