Comparative Analysis amongst Prediction of Field Findings through Empirical Model and
advertisement

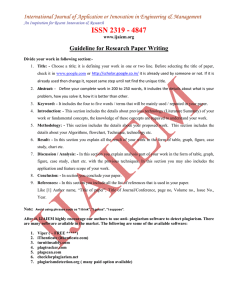
International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 12, December 2013 ISSN 2319 - 4847 Comparative Analysis amongst Prediction of Field Findings through Empirical Model and Optimized Neural Network Mathematical Model for Human Powered Flywheel Motor Arati R. Lende1 and J. P. Modak2 1 Ex Assistant. Professor, DMIETR, Sawnagi (M), Wardha, MH, India 2 Emeritus Professor and Dean (R&D), PCE, Nagpur, MH, India Abstract Neural Network is one of the most emerging tools in fitting function, future forecasting, pattern recognition, etc. This article signifies the effective methodology of Neural Network modeling for prediction of field findings. J. P. Modak and their associates had already carried out lots of investigations over development of applications utilizing Human Powered Flywheel Motor as an energy source. The applications tried so far are mostly rural based such as brick making, low head water lifting, wood turning, wood strip cutting, electricity generation, etc. The productivity of the above mentioned applications had great affection towards rider thereby affecting quality and quality of production. The paper evaluates optimum artificial neural network (ANN) parameters for prediction of experimental findings accurately through sequential variation of each ANN parameter. The most favorable values of each parameter are selected and a mathematical model is extracted in the course of it. This document also compares the prediction amongst ANN based mathematical model and traditionally generated empirical model. Keywords: Artificial Neural Network (ANN), mathematical model, empirical model. 1. INTRODUCTION TO HUMAN POWERED FLYWHEEL MOTOR (HPFM) 1.1 Working of Human Powered Flywheel Motor Energized Process Unit This machine system comprises three sub systems namely (i) HPFM [11] (ii) Torsionally Flexible Clutch (TFC) (iii) A Process Unit. The process units tried so far are mostly rural based such as brick making machine [1] [3](both rectangular and keyed cross sectioned), Low head water lifting, Wood turning, Wood strips cutting, electricity generation etc. The Figure 1 shows the schematic arrangement of pedal operated flywheel motor which comprises of following elements Figure 1 Schematics of Human Powered Flywheel Motor R= Rider M = mechanism (01-OA-B-02-01) BSC = Big Sprocket Chain Drive SSC = Small Sprocket Chain Drive GSR = Gear of Speed Rise PSR = Pinion of Speed Rise FW= Flywheel CH = Chain CS = Counter Shaft FS = Flywheel Shaft Volume 2, Issue 12, December 2013 Page 423 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 12, December 2013 ISSN 2319 - 4847 1.2 Study of already available experimental data The various parameters involved [11] in the experimentation are Table 1: Independent Variables and their symbols Mechanical Efficiency Symbol I R T ME 5 Gear Ratio G 6 Angular Velocity of Flywheel ω Sr. No. 1 2 3 Independent Variable Moment of Inertia of Flywheel Input by the Rider Time 4 Table 2: Range of Variation of Independent parameter i.e. Rider(R) Range of age 20-25Years Height Weight Blood Pressure 155-170cm 40-55 140-70 Pulse rate 68-80/min. The observations recorded during the experimentation are as below Table 3: Experimental observations Independent Variables 1 Dependent variable Log (I/RT2) Log (ME) Log (G) Log (ω T) -7.4270 0.00 0.3010 3.6305 ↓ ↓ ↓ ↓ ↓ 23 -7.1792 0.0662 0.0010 3.5570 ↓ ↓ ↓ ↓ ↓ 50 -7.2694 0.0600 0.0010 3.5004 ↓ ↓ ↓ ↓ ↓ 82 -6.1549 0 0.301 3.0767 ↓ ↓ ↓ ↓ ↓ 141 -5.9717 0 0.301 2.8587 ↓ ↓ ↓ ↓ ↓ 200 -7.2694 0 0.0569 3.4107 1.3 Empirical Model The experimental Independent variables were reduced by evaluating dimensionless pi terms by Buckingham pi theorem and a mathematical equation was generated by traditional method to predict the experimental findings. The equation [12] is as shown. ω T = 1.288 ( I/RT2)-0.46 (ME)-0.87 (G)0.40 2. EXECUTION OF ARTIFICIAL NEURAL NETWORK MODELING AND ITS OPTIMIZATION Modeling a system through ANN simulation [9] involves use of ANN parameters appropriately. A topology is nothing but the complete architecture of network formed through the use of ANN parameters. The ANN parameters should be varied systematically in an attempt to identify best topology for a specified problem. The number of layers was restricted to two as the variables involved were high in number. A table for evaluation of modeling technique is formed [5] as below. The shaded column indicates the variation of that particular parameter and shaded row shows the slandered value of that parameter. Volume 2, Issue 12, December 2013 Page 424 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 12, December 2013 ISSN 2319 - 4847 Table 4: Sequence of variation of ANN Parameters Training Number Hidden layer Size Type of Training Function Performance Function Layer1 Layer2 Type of Learning Algorithm T1 20 trainlm mse tansig purelin learngd T2 50 trainlm mse tansig purelin learngd T3 100 trainlm mse tansig purelin learngd T4 150 trainlm mse tansig purelin learngd T5 250 trainlm mse tansig purelin learngd T6 300 trainlm mse tansig purelin learngd T7 500 trainlm mse tansig purelin learngd T8 600 trainlm mse tansig purelin learngd T9 700 trainlm mse tansig purelin learngd T10 500 trainb mse tansig purelin learngd T11 500 trainbfg mse tansig purelin learngd T12 500 trainlm mse tansig purelin learngd T13 500 trainbr mse tansig purelin learngd T14 500 traingdm mse tansig purelin learngd T15 500 traingb mse tansig purelin learngd T16 500 traincgf mse tansig purelin learngd T17 500 traincgp mse tansig purelin learngd T18 500 trainlm mse tansig purelin learngd T19 500 trainlm mae tansig purelin learngd T20 500 trainlm sse tansig purelin learngd T21 500 trainlm mae tansig purelin learngd T22 500 trainlm mae logsig purelin learngd T23 500 trainlm mae tansig logsig learngd T24 500 trainlm mae tansig Purelin Learncon T25 500 trainlm mae tansig Purelin Learngd T26 500 trainlm mae tansig Purelin Learnh T27 500 trainlm mae tansig Purelin Learnk Types of transfer function 3. VARIATION IN PREDICTION OF ANN MODEL WITH VARIATION OF ANN PARAMETERS The graphs for each program are generated which illustrate the effect of each variation on prediction of model. Skipping few of the bad predictions all other graphs are shown as below The percentage error in prediction is also plotted to compare and select the best of the topology amongst these topologies. Figure 2 Predictions with 20 Neurons Volume 2, Issue 12, December 2013 Page 425 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 12, December 2013 ISSN 2319 - 4847 Figure 3 Percentage errors in predication with 20 Neurons Figure 4 Predictions with 50 Neurons Figure 5 Percentage errors in predication with 50 Neurons Figure 6 Predictions with 20 Neurons Figure 7 Percentage errors in predication with 150 Neurons Volume 2, Issue 12, December 2013 Page 426 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 12, December 2013 ISSN 2319 - 4847 Figure 8 Predictions with 300 Neurons Figure 9 Percentage errors in predication with 300 Neurons Figure 9 Predictions with 500 Neurons Figure 10 Percentage errors in predication with 500 Neurons Figure 18 Predictions with 600 Neurons Volume 2, Issue 12, December 2013 Page 427 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 12, December 2013 ISSN 2319 - 4847 Figure 11 Percentage errors in predication with 600 Neurons Figure 12 Predictions with 700 Neurons Figure 13 Percentage errors in predication with 700 Neurons Figure 14 Predictions with training Function “trainlm” Figure 15 Percentage errors in predication with training Function “trainlm” Volume 2, Issue 12, December 2013 Page 428 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 12, December 2013 ISSN 2319 - 4847 Figure 16 Predictions with training Function “trainbr” Figure 17 Percentage errors in predication with training Function “trainbr” Figure 18 Predictions with training Function “traincgb” Figure 19 Percentage errors in predication with training Function “traincgb” Figure 20 Predictions with training Function “traincgp” Volume 2, Issue 12, December 2013 Page 429 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 12, December 2013 ISSN 2319 - 4847 Figure 21 Percentage errors in predication with training Function “traincgp” Figure 22 Predictions with performance Function “mse” Figure 23 Percentage errors in predication with performance Function “mse” Figure 24 Predictions with performance Function “mae” Figure 25 Percentage errors in predication with performance Function “mae” Volume 2, Issue 12, December 2013 Page 430 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 12, December 2013 ISSN 2319 - 4847 Figure 26 Predictions with performance Function “sse” Figure 27 Percentage errors in predication with performance Function “sse” Figure 28 Predictions with transfer Function “tansig, purelin” Figure 29 Percentage errors in predication with transfer Function “tansig, purelin” Figure 30 Predictions with transfer Function “logsig, purelin” Volume 2, Issue 12, December 2013 Page 431 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 12, December 2013 ISSN 2319 - 4847 Figure 31 Percentage errors in predication with transfer Function “logsig, purelin” Figure 32 Predictions with learning Function “learncon” Figure 33 Percentage errors in predication with learning Function “learncon” Figure 34 Predictions with learning Function “learngd” Figure 35 Percentage errors in predication with learning Function “learngd” Volume 2, Issue 12, December 2013 Page 432 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 12, December 2013 ISSN 2319 - 4847 Figure 36 Predictions with learning Function “learnh” Figure 37 Percentage errors in predication with learning Function “learnh” The training program T28 was selected on the basis of minimum percentage error occurred in prediction of evidences. 4. DEDUCTION OF MATHEMATICAL MODEL THROUGH ANN MODEL Once a model is trained the values of weights and biases along with the function of the input layer and hidden layer defines the prediction of a model. The mathematical model generated from the algorithm T28 is as follows Output = 1* (LW * (2/(1 + exp(-2 * (IW * b + Ib))) - 1) + Ob) ………… Mathematical model Where, LW = Weight Matrix of Output layer of ANN Ob = Bias Matrix of Output Layer of ANN IW = Weight Matrix of Input layer of ANN Ib = Bias Matrix of Input Layer of ANN b = input matrix Purelin = Function of Output layer of ANN Tansig = Function of input layer of ANN The matrix dimensions of variables above variables are too large to show in this paper. 5. COMPARING PREDICTION OF EVIDENCES WITH ANN MATHEMATICAL MODEL AND EMPIRICAL MODEL The figures shown below give comparative analysis amongst prediction of evidences with ANN mathematical model and previously drawn empirical model. Figure 38 Comparison between experimental evidences (red) and prediction through empirical model (blue) Volume 2, Issue 12, December 2013 Page 433 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 12, December 2013 ISSN 2319 - 4847 Figure 39 Comparison between experimental evidences (red) and prediction through ANN mathematical model (blue) Figure 40 Percentage error in prediction through ANN mathematical model (red) and Empirical equation (blue) The figure 38 shows the prediction of experimental evidences (red) with previously drawn empirical model (blue) which is much deflected compared to the experimental findings. On the contrary artificial neural network based mathematical model show much better results as in figure 39. The figure 40 compares percentage error in prediction at every stage of the experimentation which also implies that neural prediction (red) is much better than the empirical model (blue). 6. CONCLUSION The paper carries a systematic method of optimization of artificial neural network model and comes out with a audacious solution for prediction of experimental findings. The plots carried for each variation of ANN parameter clearly signifies its effect on prediction of the model. The mathematical model deduced may be utilized for future research in development of a controller for Human Powered Flywheel Motor. References [1] Modak J. P. and Askhedkar R. D. “Hypothesis for the extrusion of lime flash sand brick using a manually driven Brick making machine”, Building Research and Information U.K., V22,NI, Pp 47-54, 1994 [2] Modak J. P. and Bapat A. R. “Manually driven flywheel motor operates wood turning machine”, Contempory Ergonomics, Proc. Ergonomics Society annual convension13-16April, Edinburg, Scotland, Pp 352-357, 1993. [3] Sohoni V. V., Aware H. V. and Modak J. P. “Manual Manufacture of Keyed Bricks”, Building Research and Information UK, Vol 25, N6, 1997, 354-364. [4] Modak J. P.”Design and Development of Manually Energized Process Machines having Relevance to Village/Agriculture and other productive operations, Application of manually energized flywheel motor for cutting of wood strip”, Human Power, send for Publications. [5] H. Schenck Junior “Theory of Engineering Experimentation”, MC Graw Hill, New York. [6] A. R. Lende, “Modelling of pedal driven flywheel motor by use of ANN”, M. Tech. Thesis, PCE, Nagpur [7] S. N. Shvanandam, “Introduction to Neural Network using Matlab 6.0”, McGraw Hill publisher. [8] Stamtios V. Kartaplopoulos , Understanding Neural Networks and Fuzzy Logics, IEEE Press [9] Neural Network Toolbox TM 7 User’s Guide R2010a, Mathworks.com [10] Rudra Pratap, “Getting Started with Matlab7,” Oxford, First Indian Edition 2006. [11] A. R. Bapat, “Experimental Optimization of a manually driven flywheel motor”, M.E. Thesis, VNIT, Nagpur. [12] A. R. Bapat, “Experimentation of Generalized experimental model for a manually driven flywheel motor”, PhD Thesis, VNIT, Nagpur. Volume 2, Issue 12, December 2013 Page 434 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 12, December 2013 ISSN 2319 - 4847 [13] A. R. Lende, J. P. Modak “Modellling and Simulation of Human Powered Flywheel Motor for field data in the course of artificial neural network- a step forward in the development of artificial intelligence AUTHOR Prof. (Ms) A. R. Lende received her Bachelor degree in Mechanical Engineering from BDCOE, Sewagram in 2004 and Master degree in Mechanical Engineering Design from PCE, Nagpur in 2007. She had registered her Ph.D. in 2009. She had given her teaching services to MIT, Kothrud, Pune and DMIETR, Wardha for three and two years respectively. The author also has an industrial experience of one year in the field of design and implementations. She also had worked in many mechanical engineering design projects and published papers in that region. Dr. J. P. Modak is an Emeritus Professor and Dean (R&D) PCE, Nagpur. He has guided number of Ph.D. and PG Projects in the field of Design engineering, mathematical modeling, Artificial Intelligence, Vibration, etc. He is also consultant for many industries. He have delivered number of key not lectures, expert lectures at various conferences and workshops. He became a guiding light for researchers for driving research in systematic manner. The author had contributed through large number of papers in reputed international Journals & Conferences for developing research and path of research. Volume 2, Issue 12, December 2013 Page 435