Lab Week 3
advertisement

Mobile Robotics COM596
Laboratory Session: week 3
Neural Networks for Khepera Robot Control using Matlab
Neural Network Toolbox
Integrated environment of MATLAB is shown in the diagram below. You can create
your own tools to customize toolbox or harness with Neural Network Toolbox.
Neural Net
Toolbox
Simulink
User-written
M-files
MATLAB
Figure 1: Neural Network Toolbox in Matlab environment
Defining network architecture and training algorithms
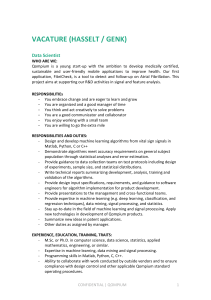
A single layer network with m inputs elements and n neurons is shown in Figure 2. In
this neural network (NN), each input element is connected with each neuron through
the weight matrix W. ith input element is connected with jth neuron – thus weight
matrix is written as Wji. If an input vector x is applied to the NN, the output vector y
will be
y f Wx b
Using the Matlab function newff() an architecture can be created with desired number
of layers and neurons.
Different training algorithms are available as functions. An example is given in
exercise 1.
b1
w1,1
net1
N1
f(.)
Y1
f(.)
Y2
x1
b2
x2
x3
N2
x4
.
.
.
xm
net2
.
.
.
bn
wn,m
Nn
netn
f(.)
Yn
Figure 2: Single layer feedforward network.
Exercise 1: Define a NN architecture and train with input-output data
Write the Matlab code and save it under a name and run it from command prompt.
%Training set
P = [0 1 2 3 4 5 6 7 8 9 10];
T = [0 1 2 3 4 3 2 1 2 3 4];
%Here a two-layer feed-forward network is created. The network's input ranges from
%[0 to 10]. The first layer has five TANSIG neurons, the second layer has one
%PURELIN neuron. The TRAINGD network training function is to be used.
net = newff([0 10],[5 1],{'tansig' 'purelin'},'traingd');
%Set network parameters as follows
net.trainParam.epochs = 50
net.trainParam.goal = 0.1
net.trainParam.lr = 0.01
net.trainParam.min_grad=1e-10
net.trainParam.show = 25
net.trainParam.time = inf
%Maximum number of epochs to train
%Performance goal
%Learning rate
%Minimum performance gradient
%Epochs between displays
%Maximum time to train in seconds
%Here the network is simulated and its output plotted against the targets.
net = train(net,P,T);
Y = sim(net,P);
plot(P,T,P,Y,'o')
Exercise 2: Train NN with different training algorithms
To train the NN, different training algorithms can be used. They have their own
features and advantages as stated below.
traingd – Basic gradient descent learning algorithm. Slow resonse but can be mused in
incremental mode training.
traingdm – Gradient descent with momentum. Generally faster than traingd, can be
used in incremental mode training.
traingdx – Adaptive learning rate. Faster training than traingd, but can only be used in
batch mode training.
trainrp – Resilient backpropagation. Simple batch mode training algorithm with fast
convergence and minimal storage requirements.
trainlm – Levenberg-Marquart algorithm. Faster training algorithm for networks of
moderate size, has memory reduction feature for use when the training set is large.
There can be different activation functions with distinct features. Those are explained
in lecture 5 in detail. Some of them are
tansig
logsig
purelin
Observe the differences of these algorithms and activation functions on the training of
the patterns given in Exercise 1.
Exercise 3: Matlab code for obstacle avoidance of Khepera
%This program is running OK avoiding
%obstacles on left/right or in front of
%Date of update 4/7/2009
ref=kopen([0,9600,100]);
for i=1:100
v=kProximity(ref);
u=kAmbient(ref);
d5=v(5);d6=v(6);
lvL=u(7);lvR=u(8);
lv=(lvL+lvR)/2;
%direction is set by
if(lv<1/15)
kMoveTo(ref,5,-1) %move right
%position in pulse 1 pulse = 1/12 =0.083mm
end
x=rand(1);
if(x==0)
kSetSpeed(ref,5,-1) %move right
else if(lv>1/15)
kSetSpeed(ref,-1,5) %move left
else
kSetSpeed(ref,4,-1) %move right
end
end
end
kMoveTo(ref,0,0);
kclose(ref);