Last on TTIT61 TTIT61: Lecture 2 Processes, Schedulers, Threads
advertisement

Last on TTIT61
The OS consists of
A user interface for controlling programs (starting,
interrupting)
A set of device drivers for accessing the hardware
A set of system calls as a program interface to hardware
(and not only, we’ll see later)
Process management
Memory management
File system
Others
TTIT61: Lecture 2
Processes, Schedulers, Threads
Alexandru Andrei
alean@ida.liu.se
phone: 013-322828, room: B 3D:439
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Lecture Plan
Outline
The concept of “process”
Memory layout of a process
Operations on processes (create, terminate, etc.)
Process state and state transition diagram
Process Control Blocks
Context switches
Threads
Motivation, user vs. kernel
Multi-threading models, threading issues
CPU scheduling
Criteria, algorithms
1. What is an operating system? What are its functions?
Basics of computer architectures. (Part I of the textbook)
2. Processes, threads, schedulers (Part II , chap. III-V)
3. Synchronization & Deadlock (Part II, chap. VI, VII)
4. Primary memory management. (Part III, chap. VIII, IX)
5. File systems and secondary memory management (Part
IV, chap. X, XI, XII)
6. Security (Part V, chap. XIV)
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
3
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
What Is a Process?
In the previous lecture, I’ve used “processes” and
“programs” interchangeably hoping you will not notice
A program is a passive entity, we use it to refer to the
executable file on the disk (or memory stick, etc., from
where it is eventually loaded in the main memory)
Definition:
A process is an active entity, it is an executing program,
it is an instance of the program
4
Process and Program
User 1
User 2
Process 2
Process 1
Executing instruction here
Editor
program
Executing instruction here
Process 1
data
We can have several processes of the same program
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
2
5
Process 2
data
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
6
1
Memory Layout of a Process
Memory
Text (code)
Data
Heap
Stack
A process may contain several data segments:
Read-only data: printf(“%d\n”, i)
“%d\n” is read-only
Initialised data: int a = 20;
20 goes into the executable file on the disk. When
the program is loaded into memory, the memory
location corresponding to ‘a’ is initialised with 20
Uninitialised data: int b;
No space for ‘b’ is reserved for the executable file on
the disk. It is just specified in the executable file
header that the uninitialised data segment is X bytes
long. When the program is loaded into memory, a
segment of X bytes is reserved for uninitialised data.
The text segment contains
the code of the program
The data segment contains
the global variables
The stack segment contains
the return addresses of
function calls, and in most
OS the local variables
The heap contains the
dynamically allocated
memory. It is typically at the
other end of the stack
segment.
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
The Data Segment(s)
7
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
The Stack Segment
int fact(int n) {
int xp;
1000: if (n == 0)
1001:
return 1;
1002: xp = fact(n – 1);
1003: xp *= n;
1004: return xp;
}
main() {
int rlt;
1005: rlt = fact(3);
1006: printf(“%d\n, rlt);
}
rlt = 6
3
1006
xp = 6
2
1003
xp = 2
1
1003
xp = 1
0
1003
xp
8
Process Execution
A register of the CPU, the program counter (PC), contains
the address of the next instruction to execute (it points in
the code segment)
Another register of the CPU, the stack pointer (SP),
contains the address of the of the top of the stack (it points
in the stack segment)
main
fact
fact
fact
fact
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
9
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Segment Sharing
Can two processes of the same program share the code
segment? What would we gain/lose if yes?
Segment Sharing
User 1
User 2
Process 2
Process 1
Executing instruction here
Can two processes, not necessarily of the same program,
share the data segment? Why would we (not) want that?
Process 1
data
Can two processes, not necessarily of the same program,
share the stack segment?
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
11
10
Editor
program
(Process1
and
2 code ?)
Executing instruction here
Process 2
data
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
12
2
Outline
The concept of “process”
Memory layout of a process
Operations on processes (create, terminate, etc.)
Process state and state transition diagram
Process Control Blocks
Context switches
Threads
Motivation, user vs. kernel
Multi-threading models, threading issues
CPU scheduling
Criteria, algorithms
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Operations on Processes
Creation: system call called fork in Unix
Termination: system call called exit
Loading of new process image (code, data, stack
segments): system call called exec in Unix
Waiting for the termination of a child: system call called
wait or waitpid in Unix
man –s 2 fork/exit/exec/wait/waitpid
13
Fork
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
14
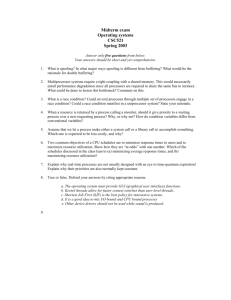
A tree of processes on a typical Solaris
Fork creates a “clone” of the invoking process. The
invoking process will be the parent, and the “clone” will be
the child. One child has exactly one parent, a parent may
have 0 or more children
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
15
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Code Example
Fork
Fork creates a “clone” of the invoking process. The
invoking process will be the parent, and the “clone” will be
the child. One child has exactly one parent, a parent may
have 0 or more children
pid = fork();
if (pid == 0) {
printf(“I am the child. My ID is %d and my parent’s ID is
%d\n”, getpid(), getppid());
execlp(“/bin/ls”, “ls”, “-l”, “/home/TTIT61”, 0);
exit(0);
} else {
printf(“I am the parent. My child’s ID is %d\n”, pid);
waitpid(pid, &status, 0);
}
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
16
The child inherits the resources of the parent (set of open
files, scheduling priority, etc.)
17
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
18
3
CoW
However, the child process has its own memory space that
contains the same data as the memory space of the
parent, just that it is a copy.
Parent and child do not share data and stack segments.
Each has its own copy that it can modify independently.
Should parent and child have different copies of read-only
segments? Do they share the code segment?
Parent and child processes have separated memory
spaces, it is as if they are not aware that the other process
exists.
Sometimes, we would like to pass data from one process
to the other
E.g.:
gzip –dc nachos-3.4.tar.gz | tar xf –
Mail composer + spell checker
Actually, in modern Unixes, data segments are allocated in
a lazy manner, i.e. only if one of them starts writing, will the
data segment copied.
This lazy copying technique is called “copy-on-write”
(CoW)
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Co-operating Processes
19
Inter-Process Communication Mechanisms
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
20
Communications Models
Pipes (gzip –dc nachos-3.4.tar.gz | tar xf -)
Signals (kill -9 pid)
Message queues
Semaphores, condition variables, locks, etc.
Shared memory segments
Network sockets (http, ftp, X windows, etc.)
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
21
Outline
The concept of “process”
Memory layout of a process
Operations on processes (create, terminate, etc.)
Process state and state transition diagram
Process Control Blocks
Context switches
Threads
Motivation, user vs. kernel
Multi-threading models, threading issues
CPU scheduling
Criteria, algorithms
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
22
Process States
As a process executes, it changes state
new: The process is being created
running: Instructions are being executed
waiting: The process is waiting for some event to occur
ready: The process is waiting to be assigned to a
processor
terminated: The process has finished execution
23
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
24
4
Process States (cont.)
The concept of “process”
Memory layout of a process
Operations on processes (create, terminate, etc.)
Process state and state transition diagram
Process Control Blocks
Context switches
Threads
Motivation, user vs. kernel
Multi-threading models, threading issues
CPU scheduling
Criteria, algorithms
New
preemption
admitted
Ready
Running
dispatch
I/O,
event completion
exit
I/O, wait
Waiting
Terminated
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Outline
25
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Process Control Block (PCB)
Contents of the PCB
Program counter value, stack pointer value, and the value
of all other registers
Memory management information (base + limit registers,
translation tables)
CPU scheduling information (process priority, pointers to
scheduling queues)
Accounting information (CPU time used, real time used,
etc)
I/O status (devices allocated to the process, list of open
files, etc)
Is a memory area (data structure) in the OS kernel memory
One for each process
Contains the data needed by the OS in order to manage
the process to which the PCB corresponds
It is also called the context of the process
When the OS switches the process that runs on the CPU,
we say that it performs a context switch
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
27
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Context Switch
Process A
26
28
Ready Queues
Process B
A running
Save state of A into PCBA
Load state of B from PCBB
Ready queue
CPU
Context switch
I/O
I/O queue
I/O request
B running
Time slice expired
Save state of B into PCBB
Load state of A from PCBA
Interrupt
occurs
Context switch
Wait for interrupt
A running
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
29
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
30
5
Scheduling
A long-term scheduler runs whenever a processes
terminates in order to decide which new process to bring in
the memory
Has to select an appropriate process mix
Too many CPU-bound processes ⇒ devices underutilised, process execution times much longer than if the
mix was more balanced
Too many device-bound processes ⇒ under-utilised CPU
Degree of multiprogramming: the number of processes in
memory at the same time
If this degree is stable ⇒ number of newly created
processes over a time interval is roughly equal to the
number of processes that terminated in the same interval
The scheduler is the routine that selects a process from the
ready queue. This is the short-term scheduler. It runs
frequently (at least one time every 100ms).
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Long-Term Scheduler
31
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Outline
The concept of “process”
Memory layout of a process
Operations on processes (create, terminate, etc.)
Process state and state transition diagram
Process Control Blocks
Context switches
Threads
Motivation, user vs. kernel
Multi-threading models, threading issues
CPU scheduling
Criteria, algorithms
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
32
Context Switch
Process A
Process B
A running
Context switch
Performance
bottleneck
B running
Context switch
A running
33
Threads
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
34
Single vs. Multi-Threaded Processes
Also known as lightweight processes
They do share the data segment
Do they share the stack segment?
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
35
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
36
6
Advantages of Threads
User Threads and Kernel Threads
Kernel threads: threads that are visible by the OS
They are a scheduling unit
Thread creation, scheduling, management is done in kernel
space ⇒ slightly slower than user threads
If a kernel thread blocks (on I/O, for example), the kernel is
able to schedule a different kernel thread or process ⇒ rather
efficient
Resource sharing (memory segments)
Faster creation and destruction (30 times on Solaris 2) ⇒
application is much more responsive
Faster context switch (5 times on Solaris 2)
User threads: implemented by a thread library at the user level
They are not a scheduling unit
Creation, scheduling, management is done by the user
(library) ⇒ faster than kernel threads
If a user thread blocks, all user threads belonging to the
scheduling unit (encapsulating process) block
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
37
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
User Threads
Kernel Threads
Supported by the Kernel
Thread management done by user-level threads library
Three primary thread libraries:
POSIX Pthreads
Win32 threads
Java threads
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
38
Examples
Windows XP/2000
Solaris
Linux
Tru64 UNIX
Mac OS X
39
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Multi-Threading Models
Many-to-one
40
Multi-Threading Models
One-to-one
User threads
User threads
k
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
k
41
k
k
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
42
7
Multi-Threading Models
Threading Issues
Many-to-many
Fork and exec?
Should the child process be multi-threaded, or should
only the calling thread be cloned in a new process?
exec invoked by one thread replaces the entire process
Signals? Which thread should get the signal?
User threads
k
k
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
43
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Pthreads
A POSIX standard (IEEE 1003.1c) API for
thread creation and synchronization
API specifies behavior of the thread library,
implementation is up to development of the
library
Common in UNIX operating systems (Solaris,
Linux, Mac OS X)
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
44
Windows XP Threads
Implements the one-to-one mapping
Each thread contains
A thread id
Register set
Separate user and kernel stacks
Private data storage area
The register set, stacks, and private storage area are
known as the context of the threads
The primary data structures of a thread include:
ETHREAD (executive thread block)
KTHREAD (kernel thread block)
TEB (thread environment block)
45
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Linux Threads
46
Java Threads
Java threads are managed by the JVM
Java threads may be created by:
Linux refers to them as tasks rather than threads
Thread creation is done through clone() system call
clone() allows a child task to share the address
space of the parent task (process)
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Extending
Thread class
the Runnable interface
Implementing
47
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
48
8
Java Thread States
Outline
The concept of “process”
Memory layout of a process
Process state and state transition diagram
Process Control Blocks
Context switches
Operations on processes (create, terminate, etc.)
Threads
Motivation, user vs. kernel
Multi-threading models, threading issues
CPU scheduling
Criteria, algorithms
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
49
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
50
CPU Scheduling
Alternating Sequence of CPU And I/O Bursts
Why scheduling?
For using resources efficiently
I/O is very much slower than the CPU (CPUs run at billions
of instructions per second, hard disk and network accesses
take milliseconds)
When a process makes an I/O request, it has to wait. In
this time, the CPU would idle if the OS did not schedule a
ready process on it.
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
51
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Scheduling Criteria
CPU utilization – keep the CPU as busy as possible
Throughput – # of processes that complete their
execution per time unit
Turnaround time – amount of time to execute a
particular process
Waiting time – amount of time a process has been
waiting in the ready queue
Response time – amount of time it takes from when
a request was submitted until the first response is
produced, not output (for time-sharing
environment)
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
52
Optimization Criteria
Max CPU utilization
Max throughput
Min turnaround time
Min waiting time
Min response time
53
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
54
9
Non-Preemptive vs. Preemptive
If a scheduling decision is taken only when a process
terminates or moves to the waiting state because of the
unavailability of a resource, the scheduling is nonpreemptive (Windows 3.1, Apple Macintosh)
Non-Preemptive vs. Preemptive
Non-preemptive
P1
0
If a scheduling decision is taken also when a process
becomes ready to execute (moves from waiting or running
state to ready state), the scheduling is preemptive
3
7
0
55
P2
2
P3
Non-preemptive scheduling requires no hardware support
(timer). The OS is also less complex.
12
16
4
5
P1
P4
7
11
16
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
56
Dispatcher
Once the new process to run is selected by the (short time)
scheduler, the dispatcher
Stops the currently running process (if any)
Switches context
Switches to user mode
Jumps to the proper location in the user program to
restart it
Preemptive leads to shorter response times.
However, operations by the kernel on some data have to
be performed atomically (i.e. without being preempted
while in the middle of managing that data) in order to avoid
data inconsistancies
A common Unix solution is preemptive scheduling of
processes and non-preemptable system calls.
However, the problem persists because of interrupts from
the hardware, which may not be ignored.
Either disable interrupts or, better, fine-grained locking
The time it takes the dispatcher to do that is the dispatch
latency
57
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Scheduling Criteria
CPU utilisation – keep it as busy as possible
The load can be between 0 and 100%. ‘uptime’ in Unix
indicates the average number of ready processes in the
ready queue. Therefore it may be > 1
Throughput – number of finished processes per time unit
Turnaround time – length of the time interval between the
process submission time and finishing time of a process
Waiting time – length of time spent waiting in the ready
queue
Response time – length of the time interval between the
process submission time and the production of the first
results
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
8
P2
Non-Preemptive vs. Preemptive
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
P4
P2
Preemptive
P1
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
P3
58
First-Come First-Served
Simple
Non-preemptive
Non-minimal waiting times
Convoy effect
59
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
60
10
FCFS Scheduling (Cont.)
First-Come, First-Served (FCFS) Scheduling
Suppose that the processes arrive in the order
P2 , P3 , P1
The Gantt chart for the schedule is:
Process
Burst Time
P1
24
P2
3
3
P3
Suppose that the processes arrive in the order: P1 , P2 , P3
The Gantt Chart for the schedule is:
P2
0
P1
P2
0
24
P3
3
6
27
Waiting time for P1 = 6; P2 = 0; P3 = 3
Average waiting time: (6 + 0 + 3)/3 = 3
Much better than previous case
Convoy effect short process behind long process
30
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
61
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Shortest Job First
Optimal w.r.t. waiting time
Shortest-Job-First (SJF) Scheduling
63
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Example of Non-Preemptive SJF
Process Arrival Time
P1
0.0
P2
2.0
4.0
P3
P4
5.0
SJF (non-preemptive)
3
62
Associate with each process the length of its next CPU
burst. Use these lengths to schedule the process with the
shortest time
Two schemes:
nonpreemptive – once CPU given to the process it
cannot be preempted until completes its CPU burst
preemptive – if a new process arrives with CPU burst
length less than remaining time of current executing
process, preempt. This scheme is know as the
Shortest-Remaining-Time-First (SRTF)
SJF is optimal – gives minimum average waiting time for a
given set of processes
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
0
30
P3
Waiting time for P1 = 0; P2 = 24; P3 = 27
Average waiting time: (0 + 24 + 27)/3 = 17
P1
P1
Burst Time
7
4
1
4
P3
7
P2
8
Example of Preemptive SJF
Process Arrival Time
P1
0.0
P2
2.0
4.0
P3
P4
5.0
SJF (preemptive)
P1
P4
12
16
0
Average waiting time = (0 + 6 + 3 + 7)/4 = 4
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
64
P2 P3
2
4
P4
P2
5
Burst Time
7
4
1
4
7
P1
11
16
Average waiting time = (9 + 1 + 0 +2)/4 = 3
65
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
66
11
Shortest Job First
Can only estimate the length
Can be done by using the length of previous CPU bursts,
using exponential averaging
1. t n = actual length of n th CPU burst
Optimal w.r.t. waiting time
How could we know the length of the next CPU burst?
2. τ n +1 = predicted value for the next CPU burst
3. α , 0 ≤ α ≤ 1
4. Define : τ n +1 = α t n + (1 − α )τ n .
Cannot be implemented as the short-term scheduling
algorithm. We cannot know the length of the next CPU
burst. We can predict it with various methods (see
exponential average, textbook, section 6.3.2)
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Determining Length of Next CPU Burst
67
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Priority Scheduling
Processes are given priorities offline, not by the OS
Starvation – low priority processes never get to the CPU
Can be countered by aging, i.e. slowly modifying the
priorities of processes that waited for a long time
69
Round Robin (RR)
Each process gets a small unit of CPU time (time
quantum), usually 10-100 milliseconds. After this time
has elapsed, the process is preempted and added to
the end of the ready queue.
If there are n processes in the ready queue and the
time quantum is q, then each process gets 1/n of the
CPU time in chunks of at most q time units at once.
No process waits more than (n-1)q time units.
Performance
q large ⇒ FIFO
q small ⇒ q must be large with respect to context
switch, otherwise overhead is too high
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Priority Scheduling
A priority number (integer) is associated with each process
The CPU is allocated to the process with the highest
priority (smallest integer ≡ highest priority)
Preemptive
Non-preemptive
SJF is a priority scheduling where priority is the predicted
next CPU burst time
Problem ≡ Starvation – low priority processes may never
execute
Solution ≡ Aging – as time progresses increase the priority
of the process
More flexible in the sense that priorities capture aspects
such as importance of the job, (financial) reward, etc.
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
68
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
70
Example of RR with Time Quantum = 20
Process
P1
P2
P3
P4
The Gantt chart is:
P1
0
P2
20
37
P3
Burst Time
53
17
68
24
P4
57
P1
77
P3
P4
P1
P3
P3
97 117 121 134 154 162
Typically, higher average turnaround than SJF, but better
response
71
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
72
12
Multi-Level Queue Scheduling
Time Quantum and Context Switch Time
Processes are assigned to different queues, based on
some properties (interactive or not, memory size, etc.)
There is a scheduling policy between queues, and a
scheduling policy for each queue
System processes
High priority
Interactive processes
Interactive editing processes
Batch processes
Student processes
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
73
Multilevel Feedback Queues
Low priority
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
74
Example of Multilevel Feedback Queue
Three queues:
Q0 – RR with time quantum 8 milliseconds
Q1 – RR time quantum 16 milliseconds
Q2 – FCFS
Scheduling
A new job enters queue Q0 which is served FCFS.
When it gains CPU, job receives 8 milliseconds. If it
does not finish in 8 milliseconds, job is moved to queue
Q1.
At Q1 job is again served FCFS and receives 16
additional milliseconds. If it still does not complete, it is
preempted and moved to queue Q2.
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
75
Multiple-Processor Scheduling
76
Further Reading
Operations on processes (man pages,
http://www.linuxhq.com/guides/LPG/node7.html)
Signals in Unix (man signal, man sigaction)
Pthreads (man pthreads)
Multi-processor scheduling (section 6.4)
Real-time scheduling (section 6.5)
CPU scheduling more complex when multiple CPUs
are available
Homogeneous processors within a multiprocessor
Load sharing
Asymmetric multiprocessing – only one processor
accesses the system data structures, alleviating the
need for data sharing
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
77
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
78
13
Summary
Processes are executing programs
Kernel manages them, their state, associated data (open
files, address translation tables, register values, etc.)
Threads are lightweight processes, i.e. they share data
segments, are cheaper to spawn and terminate
Scheduler selects next process to run among the ready
ones
Various scheduling algorithms and criteria to evaluate them
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
Reading
Silberschatz, Galvin, Gagne, 7th edition, Part II
Chapter 3: 3.1-3.5
Chapter 4: 4.1-4.3, 4.5
79
A. Andrei, Process programming and operating systems, Processes, schedulers, threads
80
14