EQUIP: Research Challenges and Goals Andrew M Stuart 1 Mathematics Institute
advertisement

BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
CONCLUSIONS
EQUIP: Research Challenges and Goals
Andrew M Stuart1
1 Mathematics
Institute
Warwick University
Funded by EPSRC
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
Outline
1
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
2
PRIORS
3
LIKELIHOOD
4
POSTERIOR
5
CONCLUSIONS
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
Outline
1
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
2
PRIORS
3
LIKELIHOOD
4
POSTERIOR
5
CONCLUSIONS
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
CONCLUSIONS
Motivation
Aim: to solve y = G(u) + noise for u given y .
PDEs: G(·) defined through solution of complex PDE.
Probability/Statistics: data y and model G are uncertain.
LSQ: minimize (regularized) Φ(u; y ) := 21 ky − G(u)k2 .
Bayesian: (u, y ) a jointly varying random variable; find u|y .
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
Bayesian Inversion
Unknown u ∈ X .
Data y ∈ RJ .
Prior u ∼ P(u).
Likelihood P(y |u): y |u ∼ N(G(u), Γ).
Bayes’ Theorem: P(u|y ) ∝ P(y |u) × P(u).
Posterior: P(u|y ) ∝ exp −Φ(u; y ) P(u).
2
1
Potential: Φ(u; y ) := 12 Γ− 2 y − G(u) .
POSTERIOR
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
Outline
1
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
2
PRIORS
3
LIKELIHOOD
4
POSTERIOR
5
CONCLUSIONS
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
Gaussian Priors
PRIORS
LIKELIHOOD
POSTERIOR
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
IC Fault Model
a1
a2
b1
a3
b2
..
.
b3
..
.
an
bn
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
Fault/Gaussian
PRIORS
LIKELIHOOD
POSTERIOR
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
Channel/Gaussian
PRIORS
LIKELIHOOD
POSTERIOR
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
Random Functions
{φj }∞
j=0 an infinite sequence of functions in X .
Construct function u by, for sequence uj = γj ξj ,
u = φ0 +
∞
X
u j φj .
j=1
The deterministic sequence γ = {γj }∞
j=1 .
The i.i.d. centred random sequence ξ = {ξj }∞
j=1 .
Permeability κ = exp u .
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
CONCLUSIONS
Random Geometry
Consider permeability defined on a domain D with
[
Di = D, Di ∩ Dj = ∅, ∀i 6= j.
i
Set
κ(x) =
n
X
κ(i) χDi (x).
i=1
Parameterize the {Di } by a finite set of random geometric
parameters a ∈ RN .
Parameterize κ(i) as on previous slide through an infinite
set of random parameters.
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
Outline
1
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
2
PRIORS
3
LIKELIHOOD
4
POSTERIOR
5
CONCLUSIONS
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
CONCLUSIONS
Groundwater Flow Inversion
Let f ∈ H −1 (D). Find log permeability u ∈ X = L∞ (D) :
−∇ · eu ∇p = f ,
p = 0,
x ∈D
x ∈ ∂D.
Given, for j = 1, . . . , J,
yj = `j (p) + ηj , `j ∈ H −1 (D), ηj noise.
Abstractly: for G : X 7→ Y = RJ find u given
y = G(u) + η, noise.
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
CONCLUSIONS
Two Phase Flow
Find log permeability u ∈ X = L∞ (D) :
− ∇ · λ(s)eu ∇p
= fP + fI (s, p) in D × [0, T ],
∂s
φ
− ∇ · λw (s)eu ∇p = gP + gI (s, p) in D × [0, T ].
∂t
Given, for (j, k ) = (1, 1) . . . , (J, K ),
yj,k = fI s(xj , tk ), p(xj , tk ) + ηj , ηj noise.
Abstractly: for G : X 7→ Y = RJ find u given
y = G(u) + η, noise.
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
Black Box Software
Find log permeability u ∈ X = L∞ (D) :
ECLIPSE( U )
Given, for j = 1, . . . , J,
yj = FIELD DATA.
Abstractly: for G : X 7→ Y = RJ find u given
y = G(u) + η, noise.
POSTERIOR
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
Outline
1
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
2
PRIORS
3
LIKELIHOOD
4
POSTERIOR
5
CONCLUSIONS
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
High Dimensional Probability Measures
There is a prior probability measure µ0 on X .
The posterior measure of interest is µy , also on X .
µy is related to µ0 by
dµy
1
(u) = exp −Φ(u) .
dµ0
Z
Since µy (du) = Z −1 exp −Φ(u) µ0 (du) we have
1
y
Eµ f (u) = Eµ0 exp −Φ(u) f (u) .
Z
We want to extract information from µy : most likely u,
confidence bands on predictions, rare events . . . .
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
CONCLUSIONS
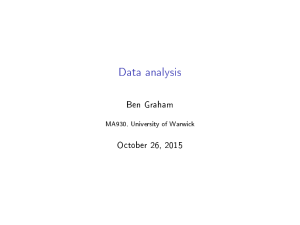
Prior Geology
1600
160
−26.5
160
160
−26
−27
1400
−25.5
140
140
−26
140
120
−27
120
−26
−27.5
1200
−27
120
−26.5
800
−29
−29.5
600
100
−28
80
−29
60
100
−28
80
−29
60
−27
100
−27.5
80
−28
60
−28.5
−30
−30
−30
400
−29
40
40
40
−30.5
200
Y (meters)
−28.5
Y (meters)
1000
Y (meters)
Y (meters)
−28
−29.5
−31
−31
20
−31
20
20
−30
−32
−31.5
200
400
600
800
1000
1200
1400
1600
20
40
60
X (meters)
80
100
120
140
160
20
40
60
X (meters)
160
80
100
120
140
160
20
40
60
X (meters)
160
80
100
120
140
160
−30.5
X (meters)
160
160
−25
−24
140
140
140
−25
140
120
−26
120
100
−27
100
−28
80
−28
80
−29
60
−29
60
−30
40
−30
40
20
−31
20
−26
−26
−25
120
120
−28
60
−28
80
60
−27
−29
−29
40
Y (meters)
−27
80
100
Y (meters)
100
−27
Y (meters)
Y (meters)
−26
40
−31
−30
−30
20
−31
20
−32
−33
20
40
60
80
100
X (meters)
120
140
160
20
40
60
80
100
X (meters)
120
140
160
−31
20
40
60
80
100
X (meters)
120
140
160
20
40
60
80
100
X (meters)
120
140
160
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
CONCLUSIONS
Posterior Geology (include production data)
1600
−26
1600
−26
1600
1400
−26.5
1400
1200
−27
1600
−25.5
−26.5
−26.5
1200
−26.5
1200
−28.5
−29
600
−27
−27.5
1000
−28
800
−28.5
Y (meters)
800
Y (meters)
Y (meters)
−28
1200
−27.5
−27.5
1000
1400
−26
−27
−27
600
1000
−27.5
800
−28
Y (meters)
1400
−28.5
600
1000
−28
800
−28.5
600
−29
400
−29.5
−29
−29.5
−29
400
400
400
−29.5
−30
200
−29.5
200
−30
200
200
−30
−30.5
−30
−30.5
200
400
600
800
1000
1200
1400
1600
200
400
X (meters)
600
800
1000
1200
1400
1600
200
400
X (meters)
1600
600
800
1000
1200
1400
1600
200
400
X (meters)
1600
600
800
1000
1200
1400
1600
X (meters)
1600
1600
−26.5
−26
−26.5
−26.5
1400
1400
1400
−27
1400
−26.5
1200
−27
−27
−27
1200
1200
800
−28.5
600
1000
−28
800
−28.5
600
Y (meters)
−28
−27.5
−27.5
Y (meters)
Y (meters)
−27.5
1000
1000
−28
800
−28.5
600
−29
400
−29.5
−28
800
−28.5
−29
−29
400
400
−29.5
−29.5
−29.5
200
−27.5
1000
600
−29
400
Y (meters)
1200
200
−30
200
200
−30
−30
−30
−30.5
200
400
600
800
1000
X (meters)
1200
1400
1600
200
400
600
800
1000
X (meters)
1200
1400
1600
−30.5
200
400
600
800
1000
X (meters)
1200
1400
1600
200
400
600
800
1000
X (meters)
1200
1400
1600
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
0.7
0.6
0.6
0.5
0.5
oil recovery factor
0.7
0.4
0.3
0.2
0.4
0.3
0.2
0.1
0.1
0
0
0
1
2
3
4
5
6
7
0
1
2
time (years)
3
4
5
6
7
time (years)
1600
1400
−26
1600
−26.5
1400
−26
−26.5
−27
1200
−27
1200
−27.5
−27.5
1000
1000
−28
800
−28.5
600
−29
400
−29.5
200
−30
Y (meters)
Y (meters)
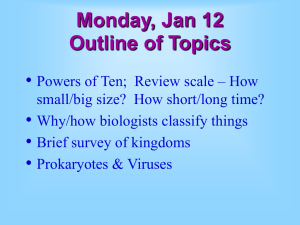
oil recovery factor
Geology with data ⇒ smaller uncertainty in prediction.
Geology without data ⇒ larger uncertainty in prediction.
−28
800
−28.5
600
−29
400
−29.5
−30
200
−30.5
200
400
600
800
1000
X (meters)
1200
1400
1600
0
−30.5
0
200
400
600
800
X (meters)
1000
1200
1400
1600
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
Model Error
What is forward model G ?
Computational forward model Gcomp .
True forward model Gtrue .
Model error = model mis-specification.
Try to learn about model error from data.
POSTERIOR
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
CONCLUSIONS
Ad Hoc Algorithms
Many algorithms used in practice are not well-founded
from statistical point of view.
The primary example is the ensemble Kalman filter.
Need to develop theory for existing such algorithms, as
they are currently used.
Need to develop modifications of such algorithms to
ensure statistical realibility.
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
Outline
1
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
2
PRIORS
3
LIKELIHOOD
4
POSTERIOR
5
CONCLUSIONS
CONCLUSIONS
BAYESIAN INVERSION: PDE INVERSE PROBLEMS
PRIORS
LIKELIHOOD
POSTERIOR
Fundamental Research Challenges
The three challenges:
High Dimensional Probability Measures
Model Error
Ad Hoc Algorithms
all interact. Progress requires:
confronting each individual challenge;
appreciation for the interaction between challenges.
CONCLUSIONS