Event-based communications in modular robots
advertisement

Event-based communications in modular robots
Nicolas Melot
Université de Bretagne Occidentale (UBO, Brest, France)
University of Southern Denmark (SDU, Odense, Denmark)
nicolas.melot@etudiant.univ-brest.fr, nime@mmmi.sdu.dk
August 20, 2010
Abstract
Modular robots have been studied for more than twenty years, after Fukuda’s first representation of a cellular robot in 1988 ([25]). Since then, many different modular robots
have been developed: chain-based, lattice-based, hybrid modular robots, each having different characteristics. But all share a common feature that is being composed of several
separate, independent and autonomous modules. Each module is equipped of sensors,
processor, memory and actuators. A modular robot is a aggregation of modules.Modular
robots may be reconfigured, sometimes on-line (without having to reinitialize them) or even
self-reconfigured. Such robots need to be controlled, either with centralized algorithms or
thanks to distributed algorithms. This control requires modules to heavily communicate
with each other, despite on-line physical network topology’s changes due to physical reconfigurations. These highly dynamic network topologies makes publish/subscribe communication to be particularly suited. Publish/subscribe communications are based on events,
where some nodes express their interests in a given event pattern, and other nodes fires
events matching or not these patterns. These events are forwarded along the links using
a multicast technique, typically classic multicast diffusion mode in network protocols as
IP, or other dedicated algorithms. These publish/subscribe algorithms require forwarders
to know only a subset of which node published this event and what nodes are interested
in it, or not require them to know it at all. This decoupling between data producers and
consumers eases the management of a dynamic underlying network, so as to be still able to
deliver messages to its matching receptors. The work described in this documents consists
of the study of this communication scheme, its implementation on Atron modular robot
through two different algorithms as well as an evaluation of their performances in various
use cases. It demonstrates that in a static network environment, methods based on event
routing tables shows better performances than flooding-based strategies, but they also induce a greater use of resources and a greater complexity to handle network’s dynamics.
Acknowledgments
I would like to thank Kasper Støy for having welcomed me in the modular robotic laboratory for these six months and give me the opportunity to learn a lot about modular robots
and investigate about publish/subscribe communications. Also thanks to all people in the
laboratory, in particular David Johan Christensen and Ulrik Pagh Schultz, for there support
and very helpful suggestions on one hand, and for always having made me to feel good,
comfortable and confident in the institute on the other hand. Also thanks to Payam, my
office mate: I enjoyed to share the institute’s best office with you for this period.
I’m grateful to all people in Mærsk Mc-Kinney Møller Institute with who it was a real
pleasure to spend time with despite the danish language, and a good opportunity to learn
about local practices such as smørrebrød and table soccer. It was a very nice opportunity to
improve in these disciplines too.
Finally, very special thanks to my parents who always provided me everything I ever
needed and more during these years of studies. Thanks to them I could focus efficiently on
studies and relax whenever the work became too stressful, without having to worry about
any materialistic concern. Thank you for your very reliable support, regardless good or bad
periods.
Remerciements
Je voudrais remercier Kasper Støy de m’avoir accueilli dans le laboratoire de robotique
modulaire pendant ces six mois, ainsi que de m’avoir donné l’opportunité de beaucoup
apprendre sur les robots modulaires et de découvrir les communications basées sur les
abonnements et publications. Merci également à tout le monde dans le laboratoire, en particulier David Johan Christensen et Ulrik Pagh Schultz, pour leur aide et leurs suggestions
très utiles d’une part, et pour toujours m’avoir fait sentir l’aise et confiant dans l’institut
d’une autre part. De même merci Payam, ma collègue de bureau avec laquelle j’ai apprécié
partager le meilleur bureau de l’institut pendant cette période.
Je suis reconnaissant à tout le monde à l’institut Mærsk Mc-Kinney Møller, avec qui
ce fut un réel plaisir de passer du temps malgré la langue danoise, et une bonne occasion
d’apprendre les pratiques locales comme le smørrebrød et le baby foot. Ce fut une très
bonne opportunité de m’améliorer aussi dans ces disciplines.
Enfin, remerciements spéciaux à mes parents qui m’ont toujours apporté quoique j’ai
pu avoir besoin et même plus pendant ces années d’études. Grâce à eux j’ai pu me concentrer efficacement sur les cours et me détendre lorsque le travail devenait trop stressant, sans
avoir à me soucier des problèmes matériels. Merci pour leur aide fiable et leurs encouragements, quelque soit les bonnes ou mauvaises périodes.
Contents
1 Introduction
1.1 An introduction to modular robots . . . .
1.1.1 Modular robots’ features . . . . .
1.2 Atron modular robot . . . . . . . . . . .
1.3 Control for modular robots . . . . . . . .
1.4 Publish/subscribe communication pattern
1.5 Related work . . . . . . . . . . . . . . .
1.6 Motivations and content . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
4
6
7
8
9
9
2 An overview of publish/subscribe communications
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Underlying network protocol features . . . . . . . . . . . .
2.2.1 Relying on classic network features . . . . . . . . .
2.2.2 Mobile and sensors networks as underlying structure
2.3 Pub/sub network topology . . . . . . . . . . . . . . . . . .
2.3.1 Broker overlays . . . . . . . . . . . . . . . . . . . .
2.3.2 Peer to peer structured overlays . . . . . . . . . . .
2.3.3 Peer to peer unstructured overlay . . . . . . . . . . .
2.4 Subscription models . . . . . . . . . . . . . . . . . . . . . .
2.5 Matching . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6 Routing notifications . . . . . . . . . . . . . . . . . . . . .
2.6.1 Events routing algorithms . . . . . . . . . . . . . .
2.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
10
10
10
10
11
12
12
12
13
13
14
15
15
20
3 Implementing publish/subscribe communications on Atron
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Underlying network and suitable pub/sub algorithms . . . . . . . . . .
3.3 Software architecture . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Algorithm synchronization with a distributed barrier . . . . . .
3.3.2 Publish/subscribe algorithms . . . . . . . . . . . . . . . . . . .
3.4 Implementation details . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 PublishSubscribe class: the publisher/subscribe interface to user
3.4.2 Subscription model interface . . . . . . . . . . . . . . . . . . .
3.4.3 Single attribute implementation . . . . . . . . . . . . . . . . .
3.5 Barrier: distributed synchronization among nodes . . . . . . . . . . . .
3.6 Event_core class: interface for algorithms’ implementations . . . . . .
3.6.1 Event flooding algorithm . . . . . . . . . . . . . . . . . . . . .
3.6.2 Event filtering-based strategy . . . . . . . . . . . . . . . . . . .
3.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
22
22
22
23
23
24
27
27
31
33
35
36
39
42
47
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Experiments
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Relevant features to measure . . . . . . . . . . . . . . . . . . . . . .
4.3 Measurement methodology . . . . . . . . . . . . . . . . . . . . . . .
4.3.1 Performances along number of modules in a robot . . . . . .
4.3.2 Performances along publishers/subscribers ratio in the system
4.3.3 Performances along the number of events sequentially fired .
4.3.4 Performances along event firing rate . . . . . . . . . . . . . .
4.4 Algorithms performance and comparison . . . . . . . . . . . . . . .
4.4.1 Experimental measurements of messages count . . . . . . . .
4.4.2 Space analysis . . . . . . . . . . . . . . . . . . . . . . . . .
4.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
49
49
49
50
51
52
53
53
53
53
58
60
5 Conclusions
61
5.1 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.2 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
References
65
2
Chapter 1
Introduction
1.1 An introduction to modular robots
Cellular robots is an approach in robotics opposed to monolithic robots. It originally aimed
to give robots a high level of versatility and robustness rather speed and precision in specific tasks. Such robots are composed of several modules, where modules are a robotic
analogy to cells in living beings in nature. Støy et al. [49], page 5 define a modular robot
as a “Robot built from several physically independent units that encapsulate some of the
complexity of their functionality”. However, the early idea in the 1980s refers to robots
able to autonomously split in different separate modules, and being able to later recombine and form a new robot, possibly different (see figure 1.1). This is now known as self
reconfigurable robots, defined in [49, pages 5 to 7] by the following criteria:
• Modular: The robot is built from several physically independent units that encapsulate some of the complexity of their functionality.
• Reconfigurable: The modules can be connected in several different ways to form
different robots in term of size, shape or function.
• Dynamically reconfigurable: The modules can be disconnected and connected while
the robot is active.
• Self-reconfigurable: The robot can change the way modules are connected by itself.
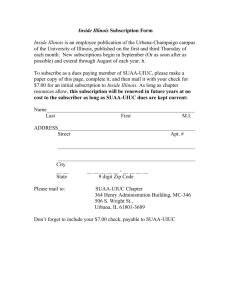
Figure 1.1: Fukuda’s early representation of a cellular robot doing maintenance work in a
storage tank (from [25]).
As an example of dynamically reconfigurable robots are figures 1.2(b) and 1.2(a). It is
important to pinpoint a module is a robot on its own: every module has an ability to acquire
information through its sensors, process acquired information and have a behavior on its
own thanks to its memory and processing unit, and it is able to autonomously influence
3
its environment using its actuators. In addition, a module is able to explicitly communicate with other modules using its communication devices and run thanks to an individual
power source, regardless this power source is internal like an individual battery, or external:
provided by an external power plug.
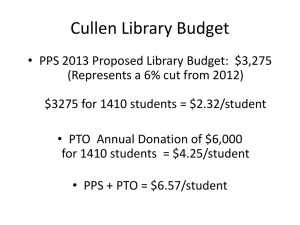
(a) Odin modular robot is a lattice-type dynamically reconfigurable and self-deformable
robot (from [28])
(b) Thor robot is composed of several different modules types which share a mechanical
strength from dedicated modules (from [35]).
Figure 1.2: Two modular robots developed in Mærsk Mc-Kinney Møller Institute (University of Southern Denmark).
1.1.1
Modular robots’ features
Goals of modular robotic
Due to their modular nature, cellular robots present interesting features. First of all being
modular allows an high level of redundancy. The consequence of a failing module over
the entire robot lowers, as robots evolve from modular to self-reconfigurable robot: the
failing module may be easily replaced on a modular robot, and even more easily on a reconfigurable modular robot since it is one goal of its design. A dynamically reconfigurable
robot may just halt its work until the module is replaced, then resume its task where it
was stopped. Finally, a self-reconfigurable robot can be self-repairing: it can replace by
itself the defective module and resume its work without needing an external intervention to
handle the failure.
Reconfigurable robots can also be versatile, as its modules can be combined and recombined in different ways to form the the basis of a wide range of different robots. They are
adaptable as they can morph to fit better different tasks or environments. Finally, modular
robots are cheap compared to their complexity: as a modular robot is composed of several
modules of one or very few different types, these modules can be mass produced, reducing
the overall price of a robot.
All these features are not necessarily true for every modular robots. As these characteristics may require more or less complex controller and mechanical structure, the features described above are often existing to a limited degree. Hence being robust, versatile,
adaptable and cheap to mass produce only represents an ideal goal. However, these characteristics guide the design of all modular robots.
Self-reconfiguration in modular robots
Different self-reconfigurable robots use different strategies to self-reconfigure. There are
three different techniques for a self reconfigurable robot to morph, thus three different types
4
of self-reconfigurable robots: chain-type robots, lattice-type robots and hybrid robots.
Chain-type robots are mainly intended to locomotion purpose. They are very effective
in moving but as a drawback, self reconfiguration of chain-type robots is very slow. A
chain-type robot is composed of chains of modules connected in a tree topology. Each
module has typically one or two rotational degrees of freedom perpendicular to the chain it
is connected to. As a consequence, the more a chain is long, the more it is flexible. Such
robots have a wide range of locomotion: walking, crawling and even rolling; thus they are
particularly suitable to stride any type of terrain. However, self-configuration in chain-type
robots is very difficult and time-consuming. It consists in two steps: first a chain bends to
move its ending module close to the one it wants to connect to, then the two modules look
for each other, align and slowly approach to finally connect. Many self-reconfiguration can
be performed sequentially so that the whole robot can completely change its general shape,
allowing it to have very different locomotion styles. For instance, a chain-type robot can
start as a long chain and crawling. After a while, it can change its shape through several
reconfigurations and become a legged robot, or it can even take the shape of a circle and
roll. An example of chain-type self-reconfigurable robot is shown in figure 1.3.
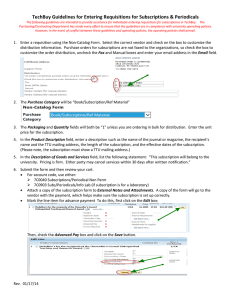
Figure 1.3: Polybot chain-type robot in a wheel configuration (from [54]).
Lattice-type robots organize their modules in a lattice structure similar to atoms in a
crystalline solid. It means that every modules are restricted withing a certain set of position
and orientations and can only move from one position in the crystalline shape, to oneanother. Lattice-type robots are not as good as chain-type robots concerning locomotion.
On the other hand, they are more adapted to self-reconfigurations, which is relatively fast
compared to chain-type robots’: modules no longer have to look for each other and synchronize where reconfiguring. Instead, modules can move with fewer help from their neighbors and directly connect to them, assuming they are in the right position and orientation.
There are several ways such modular robots can achieve reconfigurations: modules can
move from a position to another by rolling around a neighboring module; modular robots
implementing this technique are usually composed of modules with two sub-modules occupying two neighboring positions. Alternatively, a modular robot can exploit contractions
and expansions to move around the lattice: two modules contract so that they fit into the
same lattice position, and pull a third module with them. Then they expand in another direction and push other modules. Finally, modules can use a track to slide along a surface of
other modules in this direction. This last strategy has been implemented in two dimensions
but remains hard to generalize in three dimensions. Lattice-type robots can only perform
a very limited type of locomotion through reconfiguration. It is often called cluster-flow
locomotion as each module move from rear to front, making the overall robot to change its
location.
Hybrid robots exploit both advantages from chain-type and lattice-type robots. They
can be alternatively be chain-type or lattice-type, but never both at the same time. They
use chain-type form to perform an efficient locomotion, then take profit of the simplicity
provided by lattice to achieve a self-reconfiguration into another shape. When reconfigured,
they switch back to chain-type form to get an efficient locomotion. It is interesting to note
that hybrid modular robots are not more complex than lattice ones. Therefore, most modern
robots are hybrid as functionalities from both techniques come at no extra cost.
5
Pack, Herd and Swarm
Modular robots may differ in the number of modules required to form the general robot,
and how small the modules are. Støy et al. [49] define three main categories named pack,
herd and swarm robots.
Pack robots consists of one or several tens of modules. The modules have a strength
comparable to to group’s strewn. It means that a module can lift itself, as well as a significant portion of the complete modular robot. Thus a module can be a complete functional
unit such as a leg. In such robots, each module plays an important role and they all must
be strictly coordinated to allow the robot to achieve its final goal. Central control of pack
modular robot is possible, although distributed control algorithm might be more suitable.
Støy et al. [49] compare this type of robots to a pack of wolves, where every individual
performance has a significant impact on the hunt.
Herd modular robots consists of hundreds of modules. Their individual strength has
moderate influence on the global group and an individual’s functionality is limited. A
module in a robot belonging to the herd group can still lift itself, but it is not sufficient to be,
alone, a functional unit; instead, a functional unit is always composed of several modules.
A herd robot has enough redundancy to allow less strict coordination and can more easily
handle modules’ failures. Robots in a functional unit must cooperate to achieve a goal, but
not as tightly as modules in pack robots. A central control of herd robots may results in a
performances drop. Modules in this kind of modular robot may be compared to deer in a
herd; they are called herd robots.
Swarm robots lies in myriads of modules. Each of them is weak and have a limited
individual impact on the whole robot. They must cooperate together to have a significant
influence on the whole group; thus a functional unit is composed of a massive number of
modules and a massive number of functional units is required to build a whole complete
swarm robot. This kind of robot cannot be controlled centrally, and every module must
have a high degree of autonomy. They behave similarly to swarms and cannot be directly
controlled. Instead, they live and act through their own rules similarly as swarm of bees or
ants.
This classification is important, not only from the mechanical point of view, but also
regarding controllers. In fact, pack and swarm robots are obviously controlled in a different
manner: while the former need a tight coordination and can even be controller centrally, this
high need of tight coordination makes impossible the use of stochastic algorithm. On the
other hand, swarm robots’ modules are too numerous too be precisely controlled: thus the
only option relies on a certain degree of randomness in control algorithms, while various
failures can be handled by the high modules redundancy available on such robots. Therefore controllers for pack robots cannot apply for swarm robots and vice-versa. Finally,
herd robots present a problem as they can hardly be controlled by a centralized or a deterministic distributed algorithm. The number of modules as well as there degree of freedom
makes tight control difficult. On the other hand, the reduced number of modules makes any
probabilistic algorithms hardly reliable. Thus herd robots may be hard to control.
1.2 Atron modular robot
Atron modular robot is a self reconfigurable robot composed of several identical modules.
These modules, typically a few dozens, are organized in a lattice and tight together through
mechanical connectors. Each module is made of two hemispheres able to rotate around a
common axis; this rotation capability represents modules’ only actuator. Each hemisphere
is also equipped with two male connectors, two female connectors and four infrared communication devices. Using its modules’ actuator and connectors, an atron robot is able to
self-reconfigure. When two modules are tight together, infrared communication devices of
each modules are in front of each other, and a physical network link is created.
6
(a) Atron modular robot in different configurations (b) Main components of an atron
module
Figure 1.4: An atron robot and an atron module.
Atron modules are independent robots on their own: they all individually have their
own sensors, actuator, memory and processor. Several versions of atron modules have
been designed; the latest developed version includes an Atmega128 8 bits processor, 4KB
of memory and 128KB flash memory. Each atron module runs a custom version of TinyOS
based on version 2.1.0, in which is added components to manipulates sensors, connectors,
the actuator and half-duplex infrared communication devices. The atron’s controller can
also rely on the ASE framework [4]. ASE (Assemble and Animate) is a framework for
modular robots developed in Mærsk Mc-Kinney Møller Institute. It provides many algorithms to be used in robots’ controllers. Such algorithms can be learning, locomotion or
communication algorithms.
1.3 Control for modular robots
As mentioned in section 1.1.1, modular robots may be controlled centrally, but a distributed
control algorithm is preferable. Distributed algorithms make an intensive use of communications to make each different and independent node to cooperate with each other. As a
consequence, inter-modules communications are a critical matter in modular robots.
Many robots have different communication devices allowing them more or less efficient communication capabilities: Odin’s communications are based on a shared wired bus
traversing all modules, which allows it high-speed and reliable communications. In addition, Odin is able to dynamically split the internal shared bus into several independent
buses in order to reduce the number of modules sharing the same bus (see [27]). On the
other hand, Atron modules are equipped with 8 infrared devices allowing them to communicate directly with all their immediate neighbors. However, infrared-based devices are
generally more error-prone and slower. Also, since an atron’s communication devices only
allows two modules to communicate with each other, an important part of Atron’s communications consists either in routing or in broadcasting. This constraint makes the atron’s
controller to have more processing activity dedicated to communications.
It may be possible to know in advance the network topology of a modular robot, but
this property does not remains when the modular robot is reconfigurable. Dynamically reconfigurable robots make the problem even more difficult to handle. It is possible to design
an early initialization phase in reconfigurable robot where modules build a routing table
then start working. Since a dynamically reconfigurable robot may be reconfigured on line,
this knowledge of network topology is not longer valid. However, it is still possible to consider a new network discovery phase after every reconfiguration. The problem is similar
on self reconfigurable robots, except they are entitled to self-reconfigure much more fre7
quently, making harder such network discovery phases. Figure 1.5 shows different possible
network topologies for an Atron robot.
Figure 1.5: Multiple different configurations for a modular robot generates different networks.
As a consequence, modular robots and more particularly dynamically reconfigurable
robots need a communication mechanism able to handle such dynamics in the physical
network. A node must be able to receive information from another node, for instance
to get a value from a sensor only existing in this second node. It must be able to do
so wherever is this node in the network. One way to achieve this goal consists in making
modules having interesting data to let other interested modules to get this data whenever it is
available. Receiving nodes may not have to know from what module the data comes from,
as long as it is valuable for them. This communication approach named publish/subscribe
communications, is introduced in section 1.4.
1.4 Publish/subscribe communication pattern
Publish/subscribe communication pattern proposes an alternative to classic client/server
model in networks. It provides an efficient way to spread information among interested
nodes in a network, since these nodes don’t have to request this information each time they
need it. Instead subscribers express once their interests, and receive a notification carrying
data each time a publisher generates data matching this interest. This is an event-based
communication scheme, where publishers fire events, and subscribers listen to them.
This communication pattern allows the decoupling of subscribers and publishers: they
don’t need to know each other. Instead, they need to know more or less roughly other
nodes’ interests, depending on the publish/subscribe techniques involved in implementations. They can be useful in wide area networks such as the Internet. In fact, event-based
communications exist in very common uses like RSS feeds, where a user uses an RSS
reader to subscribe to a topic, then waits for news related to this RSS feed to be automatically delivered in its reader software. By nature, publish/subscribe communications
support more flexible underlying networks than client/server scheme, thanks to their decoupling property. Thus they can be particularly efficient in wireless sensors networks,
ubiquitous computing or more generally, in Mobile Ad-hoc Networks (MANET). They
can provide a good solution for modular robots communications.
8
1.5 Related work
Baldoni et al. [8] and Legatheaux Martins et al. [34] give surveys about publish/subscribe
communications, different features it involves and different approaches investigated for
each features. They also describe implementations in various projects such as Hermes
[44], Medym [12] or Pastry [46].
Most of the documented solutions rely on an underlying network providing unicast,
broadcast or multicast services. This underlying network usually lies on IP, TCP and/or
UDP ([11, 12, 15, 29, 41, 51]). These solutions handle nodes’ mobility or failures, but
assume there is always a working unicast, broadcast or multicast primitive available. This
makes them to rely on a structured network overlay, which is not the case of modular
robots. On the other hand, Sivaharan et al. [48] describe a gossip-based method on the top
of mobile and unstructured networks. All communications rely on an unstructured peerto-peer layout, and communication primitives are provided exclusively by 802.11g. Also
Hall et al. [30] give an adaptation of the routing table-based solution described in [14], for
sensors networks.
1.6 Motivations and content
The main goal of the work described in this document consists in the investigation, implementation and evaluation of different publish/subscribe communication mechanism. These
event-based communication mechanisms must be suitable with the context of control for
modular robots.
This document gives in chapter 2 an overview of state-of-the-art publish/subscribe communications, then it presents in details in chapter 3 two different implementations for Atron
modular robots. Another chapter introduces performances measurement and a comparative
study between the two different implemented techniques. One is event flooding-based: it
floods events through all available communication devices, whereas the second one uses
subscriptions to build routing tables and forward in an efficient way all events fired in the
network. This section shows better performances for routing table-based algorithms, and
discusses about reasons but also the cost of such advantages. The documents ends with
suggestions to lower the cost of routing table-based method’s good performances and concludes.
9
Chapter 2
An overview of publish/subscribe
communications
2.1 Introduction
Previous chapter 1 introduces modular robots, there characteristics as well as publish/subscribe pattern as a suitable solution to solve inter-module communications. This section
sums up the introduction on publish/subscribe mechanism described in [6, 34]. A pub/sub system aims to deliver event notifications to nodes which have subscribed to them.
Its performances can be measured in term of number of mistakes (events not delivered to
all interested nodes, or event delivered to nodes which a are not interested in it) and communication consumptions. In publish/subscribe algorithms, there are several features to
consider:
• Underlying network protocol features
• Pub/sub-level network infrastructure
• Subscription model
• Matching events with subscriptions
• Subscription routing
• Routing notifications
These different aspects are explained in details in the following sections.
2.2 Underlying network protocol features
As publish/subscribe systems are communication systems, they have to rely on one or several ways of communication with other nodes. These communication means are provided
by the underlying network protocol, which can provide several features, having different
capabilities and weaknesses.
2.2.1
Relying on classic network features
Event-based communications based on transport level network stacks as TCP or UDP can
provide an easy way to spread out subscriptions and notifications in a network, as it handles everything related to message routing and network resilience. TCP/UDP/IP is widely
deployed and thus, it makes the pub/sub system to be easily deployable. On the other hand,
10
deploying such a system in a wide network as the Internet can raise numerous problems,
like security policy and firewalls rules applied by network administrator. Beside in embedded systems, such a complete networking stack may not be implemented, because of the
high memory and calculation power constraints imposed by such devices.
Another convenient feature to rely on when designing publish/subscribe systems, is
multicast capabilities. As it is likely to have one events publisher for several subscribers
in event-based networks, it may drastically reduce network overhead to send one multicast
message addressing dozens or hundreds recipients, instead of dozens or hundreds unicast
TCP/UDP messages.
However, if using multicast for topic-based subscribers delivery is easy, content-based
multicast addressing is more challenging. The main problem lies in the number of groups
of recipients. In topic-based subscriptions, the number of multicast groups equals the number of topics, which might be limited. In content-based subscriptions there are as much
multicast groups as there are different subscriptions denoting a different subspace in notification space. As this number can get easily very high, the arising problem is the lack
of multicast group to handle all these notification groups; a solution to this problem consists in grouping different subscriptions to similar multicast groups, while keeping wrong
deliveries (deliveries to uninterested nodes or lack of deliveries to interested nodes) as low
as possible. This is called the channelization problem, computationally hard problem described in [34] and for which approximate solutions are proposed in [1]. Also, IP multicast
lacks a widespread deployment [22]. Baldoni and Virgillito [6] claim it is generally not
considered as a feasible solution for application deployed over a WAN.
2.2.2
Mobile and sensors networks as underlying structure
Underlying network infrastructure considers the network on top of which publish/subscribe
communication system works, and what services and properties it guarantees. This is an
important matter as different pub/sub systems do not exploit the same underlying communications: they can rely on neighbor-to-neighbor communications only, or on network
multicasting capabilities, if any. Also, it has to deal with the network’s stability, especially
if the physical devices are expected to move.
There are mainly two approaches in publish/subscribe systems for mobile networks.
In a first model, all nodes are considered to be able to move; these network are denoted
as MANET for Mobile Ad-hoc Network [3, 31, 37, 48]. A second approach considers a
subset of the nodes to form a stable network topology, from which other mobile nodes are
never more than one-hop far from them, and roam. Mobility induces phenomenons such as
nodes unavailability or temporary disconnections. Location-awareness is also an important
matter in publish/subscribe systems, as a mobile nodes may not be interested in an event
happening far away from its physical location. Baldoni and Virgillito [6] mention pub/sub
communications can rely on a transport protocol built over 802.11b, or being 802.11b itself.
Sensors networks can fit particularly well to publish/subscribe communication scheme,
as many nodes collect data by sensing their environment, and a few others collect it. Sensors are events publisher while data collectors subscribe to data they are interested in, such
as described in [33]. Therefore one can expect in a sensors network, to have many publishers and few subscribers. By nature, Wireless sensors sensors networks communicate
in a broadcast manner, and are largely limited with power supply. Therefore, even if the
network can be considered as fixed, the topology can change as nodes enter standby periods to save power, or fail. Hall et al. [30] and Costa et al. [18] describe publish/subscribe
solutions for wireless sensors networks.
11
2.3 Pub/sub network topology
The pub/sub-level network organizes the way every nodes (subscribers and publishers)
communicate with each other. It can be seen as an higher-level network (a network on top of
underlying network). The underlying network infrastructure directly influences the design
of this layer: depending on the underlying layer’s properties like stability or communication
routines, the pub/sub-level network can be designed to handle different properties which
can affect its performances: scalability or resistance to instability in underlying network.
Publish/subscribe networks can be designed in two different approaches. They can
consist of brokers, which are responsible of event deliveries management and brokers’
clients, publishers or subscribers nodes. A second approach consists in a peer to peer
decentralized network where all nodes can both fire and listen to events, and be responsible
for their transportation in the network.
2.3.1
Broker overlays
Broker overlay is an application-layer network lying on an efficient network protocol. This
protocol typically provides methods for unicast, broadcast and/or multicast communications. It fits well to wide area, Internet-size networks. They are independent, cooperate to
deliver events and subscriptions, and only need to be aware of a subset of subscriptions.
Clients connect to brokers to notify an event (which is then routed between brokers) or to
express them their subscriptions. If the network admits only one broker, then it is a centralized publish/subscribe system. A broker overlay is likely to be static: topology change are
rare and happen either when a new broker joins the network, or when a broker experiences
a failure.
Brokers connect to the clients they know to deliver them event notifications. Clients can
connect to the closest (from the point of view of the underlying network) broker they know,
but they can also connect to other brokers, depending on the routing strategy and expected
network behavior; see section 2.6.1. A broker topology can be either flat or hierarchical. In
a flat topology, every broker can communicate with any other broker, whereas a hierarchical
topology features several tree structures where subscribers are leaves and publishers are
roots (or vice-versa); notifications are sent in only one direction in the tree. A flat topology
allows brokers to evenly share their working load, but they have to have a greater knowledge
of every subscriptions in the network so that to route a notification to the right next broker.
On the other hand, tree structures allow brokers not to have to be that aware of subscriptions
others brokers manage, but brokers at the top of the trees generally experience a heavier
load than to ones closer to trees’ leaves.
2.3.2
Peer to peer structured overlays
A peer to peer structured overlay for publish-subscribe system is a self-organized network
where each node self-assigns a unique id which permits efficient broadcast, unicast and
multicast communications among the nodes. The fixed structure makes sure each node
id matches exactly one node in the system despite nodes arrival, leaves and failures. A
peer to peer structured overlay handles topology changes better than broker-based publish/subscribe networks, and is thus more suited to unmanaged environments. Building
such a peer-to-peer structured overlay allows to abstract self-reorganization’s consequences
over the network. Events are routed only using underlying network capabilities. Many
such systems have been implemented, based on unicast communications (Pastry[46]) or
multicast[45], topic-based (Bayeux[56]) or content-based (Rebeca[52]).
12
2.3.3
Peer to peer unstructured overlay
Unstructured overlay is an unmanaged topology, which aims to organize small networks
despite failures and nodes leaves and arrivals. Unstructured overlays mainly use flooding,
gossiping or random communications (see section 2.6) to spread out events and subscription. This is due to the lack of any structure facilitating message routing through the network, which representation in memory is difficult to keep up to date while the network
constantly changes its topology. Unstructured overlays are probabilistic since there is always a possibility for an existing element to be not found in a search.
This peer-to-peer unstructured overlay suits well to mobile networks and sensors networks. High dynamic in mobile networks makes difficult to maintain routing table, and/or
this maintenance consumes too much calculation resources [31][3]. Typical event routing
solutions rely on underlying p2p network, usually MAC network and exploits mobile and
sensors networks characteristics such as broadcasting messages.
2.4 Subscription models
Subscription model rules how a node expresses its interests to a particular event that could
be fired. There are several subscription models among which topic-based and content-based
models emerge.
In topic-based subscription model, subscribers express their interests about a particular
topic and receive all notifications related to this topic. A topic can be a proximity sensor
value a publisher publishes about whenever it decides to. Each topic can be assimilated
as a channel ideally connecting every publishers to every subscribers of this topic This is
a coarse grain subscription model similar to RSS feeds on the Internet; it can eventually
be fined through wildcard characters in topic names or topic hierarchies[34]: if topic A is
parent of topics B and C (B and C are sibling), then subscribers of A receive events A, B
and C. On the other hand, subscribers of B only receive events matching B, no event C and
only a subset on events A.
Content-based subscriptions model is a generalization of topic-based. It provides a
much more fine correspondence between a node’s needs and subscriptions it expresses.
Events are not classified according to a predefined criterion (topic name in topic-based
models), but properties of events themselves. Subscriptions are a set of constraints regarding some attributes, which can be expressed as an equality (Ai = vi ) or belong-ship to a
range (Ai ∈ [vmin ; vmax ] or Ai < vi ). A topic-based subscription is a content-based subscription consisting of only one equality constraint over an attribute describing the event’s name.
Since content-based subscriptions involve several constraints overs attributes, several tests
over attributes must be performed to check if an event matches a content-based subscription, or not. This increased complexity of event matching increases required calculation
power to compute the set of interested nodes, and thus the event routing activity. Aguilera
et al. [2] and Mülh et al. [40], chapter3 present efficient matching algorithm for contentbased systems. More details about content-based subscriptions and matching strategies for
them are given in section 2.5.
More subscription models exist, like type-based subscription model[23, 24], where
events are objects belonging to a specific type. A coarse grain filtering can be achieved
thank to objects’ type, as in topic-based models, and a finer grain filtering is made possible
thanks to all object’s attributes and methods. Thus type-based subscription model represents a trade-of between topic and content-based systems. Concept-based systems Cilia
[17] exploit ontologies capabilities to eliminate previous approaches’ need of a well known
and shared knowledge about attributes features (type, size) and meaning. XML-based approaches brings XML structure to implement hierarchy in events. XML representation also
allows interoperability but requires heavier processing [48]. Finally, Location-aware suits
particularly to mobile environment, as nodes may be only interested in events happening in
13
proximity. Such approach require the pub/sub system to be able to track its nodes’ mobility.
Location-aware systems are described in [20].
When a publisher wants to fire an event or when a node has to forward (route) any
event it has received, it has to check if sending this event is meaningful. Sending an event
through a channel is generally meaningful when it is known there are interested nodes in
this event in the direction of this channel. The decision whether there are nodes interested
in this event is tightly coupled with matching an event to a subscription: an event matches
a subscription if the node which emitted the subscription is interested in the event. The
matching algorithm depends directly on the subscription model and can be more or less
complex.
Finally, subscriptions and notifications routing along the publish/subscribe network
consists in making as much relevant nodes as possible to be aware of a subscription or an
event, using possibilities offered by the publish/subscribe network. This is the core of an
event-based communication system. There are several routing strategies for subscriptions
and events, and all can be very different. However, they can be classified as deterministic methods, or gossip-based methods. The former uses routing tables usually built from
subscriptions while the latter spreads out events more or less in a random way. Both these
approaches have there advantages and inconveniences. Clearly, the deterministic approach
allows very good performances in term of delivery errors and use of network, but gossipbased methods present a much better tolerance to unstable underlying networks.
2.5 Matching
Matching an event with a subscription is crucial to route efficiently events toward interested
nodes. It allows routers to take a decision if they should convey an event toward a particular
channel or not. Matching events with subscriptions is tightly coupled with the subscription
model the publish/subscribe system uses (see section 2.4). In this section, the subscription
model is assumed to be content-based, as this is one of the most described in publications,
and is more general than topic-based subscription model.
In content-based systems, a notification is a set consisting on equality relations between
attributes names and values, among all n attributes the system allows. A notification e (also
called “event”) can be noted {Ai = vi |∀i ∈ [1; n]} where vi is an exact value belonging to
the type of attribute Ai , or the value “any”. “any” value means any value for this attribute
is not relevant in this notification. An attribute not mentioned in an event means this attributes takes the “any” value. In other words, if attributes(e) gives the set of all attributes
mentioned in a notification e, then ¬(Ai ∈ attributes(e)) ⇔ Ai = “any”. Let’s consider notification space E to be the space in which is included all notifications the system allows;
E is a n-dimensional space, and a notification e with no “any” attribute is a single point of
space E (e ∈ E).
A content-based subscription is a set of constraints of equality, difference or inequality
to a value, or belonging in a value range over all attributes. Again, an attribute Ai ’s constraint can be an equality to “any” (Ai = “any”), which means this attribute is not relevant
in this subscription. In this case, this attribute doesn’t have to be mentioned. A subscription
s describes a space included in notification space E (s ⊆ E). A subscription S1 is said to
cover a subscription S2 if S2 is a sub-space of S1 or if S2 ⊆ S1 . Also, a subscription S1
/
intercepts a subscription S2 if S1 ∩ S2 6= 0.
A notification e matches a subscription s if it denotes a point in subspace s. In other
word, if match(e, s) is true when e matches s and false when it doesn’t, then match(e, s) ⇔
e ∈ s. While matching a notification against a topic-based subscription is trivial (it requires
to check an equality constraint over a simple attribute), matching an event against a contentbased subscription can be much more difficult, due to the higher number of constraints to
check. Matching sequentially each notification’s all attributes against all subscriptions can
easily lead to poor performances, and smarter algorithms are required. Aguilera et al. [2]
14
and Mülh et al. [40] give solutions to match events with subscriptions. They lie in building
efficient filters from all known subscriptions then use these filters to match events. Kale
et al. [32] provide a formal complexity analysis and comparison of matching algorithms.
2.6 Routing notifications
Routing notification is the core concern of a publish/subscribe communication system. Baldoni et al. [8] and Legatheaux Martins et al. [34] give a formal specification of the event
routing problem. It basically lies in conveying events through the network, toward all interested nodes and avoiding to reach nodes not interested in it. A routing algorithm aims
to guide notifications through the network, in a most efficient manner regarding criterions
described in section 4.2.
Routing algorithms can be split in two main categories. One is based on deterministic
event routing tables while the second is based on stochastic strategies. If the former is able
to achieve a good level of performances (regarding section 4.2), it is also exposed to very
bad results when event routing tables turn to be out of date. On the other hand, probabilistic
methods do not provide 100% guaranties of any result, but whatever unstable the network
is, it provides a high probability an event is actually delivered.
2.6.1
Events routing algorithms
While several different algorithms exist to guide events in a network overlay, they can be
classified in two main categories. First is algorithms based on deterministic methods, like
multicasting, flooding and selective broadcasting. They are said deterministic because they
need the nodes to keep a precise knowledge about the network, usually other nodes’ subscriptions and their location. This knowledge is acquired using deterministic method, and
exploited by a deterministic algorithm to build and maintain a event routing table. Finally,
this table deterministically guide events toward the right directions in the network. In stable underlying networks, deterministic algorithms can provide both correct and optimal
solutions at the same time. However, it is important to keep in mind that in spite of the
use of deterministic routing tables, deterministic algorithms does not imply a deterministic
guarantee on deliveries: fired events may not be delivered to their subscribers (false negative), and may be delivered to uninterested nodes (false positive). This is true between the
moment when the underlying network topology changes, and when the routing tables have
been correctly updated.
Beside them are probabilistic methods. Unlike deterministic algorithm, probabilitybased routing doesn’t guarantee any correct nor optimal solution, but it provides an low
probability of false positives or false negative. On the other hand, probabilistic methods
do not have to maintain routing tables, and are therefore more robust than deterministic
algorithms regarding underlying network topology changes.
Event flooding
Regarding routing performance measurement described in section 4.2, an ideal solution
concerning false negatives and memory overhead is event flooding. Event flooding consists
simply for event publishers and routers to broadcast in each channel it can use, every event
they have received or fired. In the former case, the event is not forwarded to the channel
from which it has been received. This routing algorithm is simple to implement, does not
reduce subscription expressiveness, and can stand as reference a when measuring performances. However, it is generally not used because of its poor scalability, since it generates
a lot of false positives and network overhead.
Another flooding method lies in subscription flooding. Every subscriber broadcasts its
interest and its id, so that every node is aware of all subscriptions in the entire system. Thus
15
they can build a routing table to form a publish/subscribe-level network overlay. When
publishers fire events, they reach only matching subscribers. It makes this algorithm to be
both correct and optimal regarding notification routing. However, this method proved to be
very costly when broadcasting subscriptions ([13, 47]), especially when they change at an
high rate: every node has to broadcast all its subscriptions in the whole network, causing
important network overhead, as event flooding does. Cao and Singh [12] present some
work around subscription flooding.
An optimal algorithm: Ideal multicast
A notification n should be routed to all nodes subscribing this event, preferably by the
shortest path. Since broadcasting consumes too much bandwidth and process power (to
discard false positives in each node), another idealized and popular solution lies in underlying multicasting systems, using one multicasting trees for each different group of
subscribers. Legatheaux Martins et al. [34], section III-A describes in formal details this
idealized solution. Every node analyzes its own set of known subscriptions, and extracts a
partition P of the union of subscriptions in such a way that every elements in partition P’s
element p (p ∈ P) belongs to exactly the same set of subscriptions (equation 2.1). Since P
is a partition of the union S of all subscriptions, then any event e belonging to at least one
subscription of S, belongs to exactly one element p of P. Each p is mapped to a multicast
group G p , which recipient set is given by equation 2.2 (where nodes(s) gives the set of all
nodes interested in subscription s). An event belonging to p is forwarded to G p .
∀p ∈ P ∧ ∀e ∈ p ∧ ∀s1 , s2 ∈ S : e ∈ s1 ⇔ e ∈ s2
(a) Subscriptions S1 , S2 , S3
and S4 in notification space.
They may intercept each
other.
(2.1)
(b) Groups G1 G2 G3 G4
G13 G12 are formed from S1 ,
S2 , S3 and S4 such as every
elements in every group belong to the same set of subscriptions. (schemes from
[34]).
Figure 2.1: Channelization problem: create as few groups as possible, every groups being
as uniform as possible; uniformity is defined by how uniform is the interest of receivers
within this group.
/
G p = {nodes(s)|∀s ∈ S ∧ s ∩ p 6= 0}
(2.2)
This method ensures there is no false positive nor false negative in event deliveries.
Assuming the multicast network is optimal in term of network overhead, this algorithm
it is both correct and optimal. This method also assumes every node knows every other
nodes’ subscriptions; if S is the set of all subscriptions in the system, then each node requires O(|S|) space to store them. The algorithm assumes the multicast groups to be shared
among all nodes in the system, thus each node must recompute multicast group as soon as
they receive a new subscription. Also, this algorithm may require 2N multicast groups for
16
a system consisting of N nodes. As this grow very quickly with the number of nodes, it
is necessary to merge enough groups to fit the underlying network requirements. Merging
groups can induce false positives since events are forwarded to larger groups consisting of
nodes not interested in the same topics. The problem of reducing the number of group while
keeping as low as possible the level of induced false positive deliveries is known as channelization problem, a computational hard problem for which only approximate solutions
are known [1].
An approximate solution to channelization problem consists in dividing notification
space into cells. Each cell is mapped to a group of nodes, all nodes having at least one
subscription intercepting the cell. Each cell is associated with exactly one multicast group,
and each group is associated to at least once cell. A notification belonging to a cell is sent
through the multicast group associated to this cell. Thus the number of required multicast
groups is lower or equals the number of cells. However, as a consequence of decreasing
the number of multicast group, this method creates false positives.
When cells are contiguous and disjointed, they can be mapped to key computed from
their characteristics, like their coordinates in notification space. In the same way, subscriptions can also be mapped to one or several keys matching the cells they intercept.
Notifications can then be routed to keys denoting nodes interested in this event. It means
that nodes are organized in a structured overlay, and notifications can be easily routed in
that network. This method is similar to rendezvous-based routing (see below) since notifications and subscriptions meet in the network, striving the way computed from their own
characteristics. It is also possible to partition the subscription space instead of notification
space, when it is possible to group them by semantic similarity.
Figure 2.2: The notification space is split in 4 cells, mapped with 3 different groups G134
(dark red), G12 (green) and G1 (light blue), according to cells and subscriptions interceptions.
Shortest Path Spanning trees
When multicast is not available, some variant of ideal multicast algorithm (section 2.6.1)
are available. An alternative consists in building a Shortest Path Spanning Tree (SPT) with
the node matching subscription and rooted at the event publisher. It consists in pruning an
SPT rooted at the publisher and spanning all nodes, to the matching subscribers [10]. Such
an SPT is built using similar techniques to link-state unicast and multicast routing [38, 39].
Selective routing
Selective routing algorithms tend to reduce network overhead from flooding techniques, by
both using routing table to reduce notification spread and reducing the amount of subscriptions each node has to memorize and forward. This is particularly efficient when only a
small portion of the nodes is indeed interested in subscriptions, but consume slightly more
memory and calculation resources. If a major part of nodes are interested in an event, event
17
flooding may be a realistic option since subscriptions has not to be flooded in the network,
and nodes don’t have to memorize any routing table.
Filtering-based In filtering based methods, notifications are routed only through path
leading to interested nodes. Such paths are build using reverse path learning[21] based on
subscriptions forwarding. Subscriptions are spread out in the network so that each node
can build an event routing table; Also, subscriptions forwarding is bounded to nodes which
routing table can be affected by this new subscription. Carzaniga et al. [14] describe in
details this routing algorithm.
Filtering-based routing algorithms provide a correct and optimal solution for events
routing. Also, the nodes don’t have to be aware of all subscriptions in the whole system,
but only their immediate neighbors’. Finally, they induce no limitation on subscription
language. On the other hand, as the consequence of the need of other nodes’ interests,
filtering-based routing strategies have to maintain a routing table and keep it consistent
regardless of changes in other nodes’ interests and underlying network topology. This
algorithm is explained in more details in section 3.6.2, about its implementation on Atron
modular robot.
Rendezvous-based routing These algorithms makes similar subscriptions and notifications to converge to the same node. This node is then responsible to forward notifications
to subscribers it knows. More precisely, for a given subscription σ, a set of node SN(σ)
named rendezvous nodes of σ are responsible to store σ and forward events matching it to
all its subscribers. For all σ matching e and SN(σ), exist rendezvous nodes of e EN(e).
EN(e) represents all nodes responsible to forward e to all its subscribers.
SN(σ) and EN(e) can be obtained through a mapping function mapping a point in
notification space with an id. Such a function can be equation 2.4, where x and y are values
from attributes a1 and a2 in figure 2.3. SN(σ) is all ids calculated from all the points
included in σ, and EN(e) is all ids obtained from the point e through the mapping function.
This method assumes that among nodes responsible for a notification e, there is always at
least one responsible for notification σ, where σ matches e (equation 2.3). In other words,
when a publisher notify the set of nodes responsible for the event it fires, one of them must
know what nodes are interested in this event This condition is given as mapping intersection
rule[9]; meeting this requirement is non-trivial task. Rendezvous-based routing algorithm
has been introduced in [53], and reused in systems such as Bayeux[56] and Hermes[44].
∀e ∈ N ∧ ∀σ ⊆ N : e ∈ σ ⇒ SN(σ) ∩ EN(e) 6= 0/
(2.3)
map(x, y) = 2 · (x − 1) + y
(2.4)
Figure 2.3: Notification space composed of two attributes a1 and a2 , both having numeric
values.
18
Because several different nodes route different notifications, rendezvous-based routing
allows a good calculation charge distribution charge among all nodes in the system. However, they don’t fit well dynamic: when a new subscription appears, the whole partition
must be computed again and mapped again to nodes. Moreover, subscriptions handled by
one node may be moved to another. Concerning fault tolerance, a mechanism must ensure
a node can replace another falling node by forwarding all the subscriptions it was responsible for. Finally, rendezvous-based methods suffer from another significant drawback: the
notification space must be composed of attributes from which it is easy to map a numeric
value. While it is trivial with numbers or ordered discrete values, mapping a value from a
string (for instance) can require a lot more calculations.
Probabilistic algorithms
Probabilistic algorithms are different from deterministic algorithms as they don’t rely on a
deterministic routing table to forward subscriptions or notifications. This difference makes
probabilistic algorithms less vulnerable to physical network topology changes, than deterministic algorithms can be, because of an synchronized routing table. Probabilistic algorithms are inspired in epidemic spreads to spread out information in a network; they are
also called epidemic or gossip-based algorithms. They consists in forwarding pieces of
information toward several randomly chosen neighbors, like a decease spreading in a given
environment.
Probabilistic algorithms work stepped by synchronized gossip rounds, when every pair
exchange with a random set of its neighbors, about the the state of the global publish/subscribe system. In such a round, they exchange their knowledge about published events as
well as other pairs’ subscriptions. Costa et al. [19] classify gossip communications along
two criterions in two different dimensions: gossips can be push or pull style, and positives
or negatives. In push gossip styles, nodes gossip periodically their knowledge about notifications and publications. On the other hand in pull style gossip, nodes solicits information
from neighbors when they realize they needs extra knowledge to compensate losses. Gossips are said positive when messages contains the state of the publish/subscribe system as
perceived by the message issuer, or negative when such messages contains required knowledge to compensate lack of awareness a node can have about the overall publish/subscribe
system’s state.
A gossip-based communication mechanism is often push/positive to spread the system
state, or pull/negative to react when a message loss has been detected by a node; however,
push/pull and positive/negative dimensions have, in principle, no influence on each other.
Pull/negative pair is often preferred for its high degree of reactivity as well as its low communication rate. However in pull/negative pair, the time before a node realizes it misses
some information can be long; in that case push/positive-based algorithms can be a better
solution.
Gossip-based algorithms present interesting features such as an even load distribution
and a very good resilience to topology changes. Also, these algorithms are said to be
simple to implement and inexpensive to run. Finally, probabilistic algorithms have a good
scalability, as they keep their properties while the global network counts more nodes.
Event routing for MANETs and wireless sensors networks
Publish/subscribe implementations for MANETS can rely on both deterministic and probabilistic methods. Such systems, usually embedded, are highly constrained by energysaving concerns. This constraint often lead their designers to use broadcast communications, cheaper than unicast in a wireless network context, and design the publish/subscribe
algorithms over a data link layer (802.11X) or classical MANET routing protocol such as
MAODV ([55]). Anceaume et al. [3], Huang and Garcia-Molina [31] and Picco et al. [43]
describe different algorithms for building and maintaining tree event routing structure in
19
MANETs over a data link layer. Picco et al. [43] present an algorithm for restoring the
event routing table after a disconnection in a loop-free topology within a mobile ad-hoc
network. It features a separation of concerns between tree connectivity layer and event
forwarding layer.
These deterministic techniques shows their limitations when coping with dynamic networks: when a change happens in the physical topology, it takes time to update routing
tables; Within the period between the topology changes and routing tables are updated,
events may be forwarded in the wrong direction, and create false positives and false negatives. Baldoni et al. [7] and Baehni et al. [5] present structureless algorithms: they don’t
maintain any deterministic data structure on the topology. They are based on flooding or
gossip. More particularly, Baldoni et al. [7] introduce an informed flooding technique based
on euclidean distance to direct an event to its destinations.
Event routing for sensors networks Hall et al. [30] and Costa et al. [18] propose adaptations for sensors networks from event routing for wired networks. Hall et al. [30] modify
the work from [42] which rely only on broadcast communications. It provides specific solutions to reduce packet collisions. Also, Hall et al. [30] adapt [14] for sensors networks
by extending the acyclic overlay network with backup routes for handling permanent and
transient failures.
2.7 Conclusion
The publish/subscribe approach in communications involves a lot of different features. First
of all, the physical network on the top of which the publish/subscribe mechanism must
be implemented: depending on its structure, its stability or the communication methods
it offers (unicast, broadcast or multicast), the solution can be very different. Then the
publish/subscribe algorithm can involve different nodes and connectivity, thus design its
own network. This network can be brocker-based or a structured or unstructured peerto-peer overlay. This publish/subscribe-level network depends mostly on the underlying
network characteristics.
Another important feature to consider in a publish/subscribe system is its subscription
model: among a large variety of subscriptions models, topic-based and content-based models represent a large part of investigations. The former model is based on a discrete and
bounded topic set subscribers can subscribe to, and publisher publish about. This is a common scheme for publish/subscribe system, like RSS feeds through Internet. It is very easy
both to implement and run, but remains very limited in its expressiveness. The latter model,
content-based model, is a generalization of topic-based model: it offers a much wider expressiveness (based on continuous unbounded “topic” set) but is much more difficult both
to implement and run. It is difficult to implement because of the need to design a subscription language comparable to SQL, and difficult to run because of the need of matching
events with subscriptions, and the channelization problem to forward events through suitable multicast trees (see [34]).
Among these different characteristics, there are three main different categories of publish/subscribe algorithms. The first category rely on flooding events or subscriptions, a
second one is based on building routing tables thanks to subscriptions so that to forward
efficiently notifications toward the matching subscribers, and the last category is based on
epidemic or gossip algorithm to spread out events in a random-based way. These three
main strategies have different advantages: flooding-based methods are very simple, routing
tables-based algorithms are efficient and gossip-based are reliable through dynamic network. On the other hand, flooding techniques are not scalable, routing table-based strategy
hardly support dynamic network and gossip-based algorithms cannot guarantee all events
are always delivered to all its subscribers.
20
Networks on dynamically reconfigurable robots are typically peer-to-peer in the sens
that messages are forwarded from module to module instead of circulating on a dedicated
and shared bus. An exception is Odin modular robot [28] which is able to provide such
a structure. They also don’t provide any unicast, multicast nor broadcast communication
primitive but only a way to send a message to immediate neighbors through all different
available channels. Also, their communication device may not be reliable and transmitted
messages may be corrupted. Also, modular robots can be pack, herd or swarm (see section
1.1.1). Thus they need publish/subscribe algorithms able to cope with unstructured peerto-peer underlying network, and handle their errors. Such algorithms must be suitable
for pack robots (where flooding-based methods may show better results), swarm robots
(gossip-based seems more suitable) or herd robots, where routing table-based algorithm
may be a suitable pack-swarm intermediary solution.
21
Chapter 3
Implementing publish/subscribe
communications on Atron
3.1 Introduction
This section introduces the implementation of two publish/subscribe algorithms for the
modular robot Atron. The algorithms are integrated into ASE (see section 1.2). All publish/subscribe algorithms described here are based on different routing techniques, but they
all have to run on a similar underlying network topology. In addition as a result of Atron’s
self-reconfiguration capability, they also have to cope with highly dynamic network connectivity. The following sections argue about the choices made in publish/subscribe implementations. They explain the selection of publish/subscribe algorithms, the subscription
model as well as details such as how to handle network cycles. Everything explained here
stick to general working conditions. However, some Atron-specific features may induce
more particular properties making possible simplifications and/or improvements; they are
also described in this section.
3.2 Underlying network and suitable pub/sub algorithms
All implemented algorithms run on the modular robot Atron. Atron presents some particularities due either to the modular robot category it belongs to, or to its own particular
characteristics. Here is a list of relevant Atron’s attributes willing to affect the nature of the
underlying network.
• self-reconfigurable: the underlying network topology might change several times
while the robot is functioning.
• Pack or Herd robot: the number of modules is typically limited to a few dozens.
Atron robots may be composed of hundred modules but are unlikely willing to reach
several thousands of modules.
• Cheap and infrared-based communication devices: cheap communication devices
may be slow and exposed to errors or packets losses due to light interferences.
• Peer-to-peer only communications: every channel available on each module may
reach at most one other module, or no module at all. Nothing, hardware or software, allows to directly link two modules if these two modules are not immediate
neighbors. There is no multicast method available.
22
The self-reconfigurable nature of Atron represents its most restrictive feature. This constraint makes the network on an Atron-based robot belonging to Mobile Ad-hoc Networks
(MANET). On the other hand, the unstructured, peer-to-peer nature of communications in
Atron robots represents a strong orientation toward flooding or gossiping-based algorithm.
Finally, Atron being equipped with error-prone communication devices, and entitled to
form herd-type robot, random-based or gossip algorithm might be the best alternative to
allow modules to communicate. However, Atron robots often form pack robots consisting
of only a couple of dozen modules. Pack robots need a tighter synchronization and can
hardly rely on modules redundancy to handle errors due to failure or algorithms randomness. Therefore, a deterministic algorithm may also be necessary.
As a consequence, two algorithms are implemented for Atron robot. The first one,
event flooding remains the simplest and mainly stands for comparison purpose (see section
2.6.1). The second is a deterministic algorithm needed to handle pack robots composed
of a limited number of modules; this implementation is based on filtering-based strategies
(section 2.6.1). A third possible algorithm is intended to herd robots, able to handle failures
thanks to numerous modules allowing redundancy. It is a gossip-based publish/subscribe
algorithm as introduced in section 2.6.1; this last algorithm is not implemented.
All algorithms implemented in this work share a common programming interface. A
common interface for several different publish/subscribe algorithms makes sens, as these
different algorithms provide the same service: subscribe to events and publish them. Keeping a common interface allows to provide users a similar front-end, and use these services
a similar way whatever is the underlying algorithm. This property also eases the replacement of a given publish/subscribe algorithm in any robot’s controller. Finally, the stable
universal publish/subscribe interface structures the design of new algorithms, making such
development easier. Figure 3.6 illustrates how the implementation is structured.
3.3 Software architecture
Deployment diagram shown in figure 3.1 represents the organization of all software elements available in a module. This module is part of a modular robot using a publish/subscribe system, and all modules in the robot are identical. A modules runs a controller
encapsulating ASE framework. ASE provides the publish/subscribe system composed of a
subscription model, a publish/subscribe algorithm and distributed barriers.
3.3.1
Algorithm synchronization with a distributed barrier
Synchronization makes sure all modules in the modular robot wait for each other before
they start to run the algorithm. This guarantees there is no module still initializing and
unable to take part of the routing algorithm when starting the robot. Synchronization aims
the same purpose concerning algorithm reinitialization. It uses a distributed barrier, which
is explained below. When starting, a node initializes its publish/subscribe algorithm, then
runs the distributed barrier once. When crossing the first barrier, it starts to listen incoming
messages related to the pub/sub algorithm and run a distributed barrier a second time.
When this second barrier is crossed, it starts to output publish/subscribe algorithm-related
messages. This double barrier ensures that no module outputs a message before all other
modules are actually ready to receive them. The double barrier may be avoided when
starting the robot, but it turns out to be important to handle reinitialization any node can
ask at any moment.
Figure 3.2 illustrates the way of functioning of a distributed barrier. Every node keeps
in memory the state it knows about all nodes of the robot. It consists for every individual
node n, of sending to all neighbors, their own knowledge about the state of all modules in
the whole robot. On the beginning, this knowledge simply states that node n itself only is
known to be ready. When node n receives a message, the knowledge it carries is merged
23
Figure 3.1: Deployment diagram of the publish/subscribe system on an atron robot.
with the previous knowledge n had. If this incoming message brings any valuable new
information, then n broadcasts again its new knowledge. When a node n knows that all
modules have started, then it crosses the barrier and the algorithm is finished.
This algorithm works assuming every node knows in advance how many nodes the
complete robot is composed of. Notice when the algorithm is stopped, it is still possible to
receive different incomplete knowledge messages from neighbors.
3.3.2
Publish/subscribe algorithms
Flooding algorithm
Interactions between nodes with flooding publish/subscribe algorithm is very simple: figure
3.3 shows a simple event flooding scenario where the underlying network is composed of
a cycle, and only one node has subscribed to an event.
This extreme simplicity induces several problems. Figure 3.3 shows that events are
spread out through all channels in the network. Most of them are useless to route this event
only to its subscribers. Network cycles are also a problem that requires duplicate detection,
as discussed in section 3.6.1.
Filtering algorithm
Consider the network in figure 3.3. The event filtering algorithm works as the scenario
shown in figure 3.5:
Initialization (phase 1)
In initialization phase, the algorithms builds a spanning tree; this phase is explained
below and illustrated in the first phase of figure 3.5. It aims to change the network at
the top of figure 3.4 to the one in the middle. Here the spanning tree breaks the loop
by ignoring the link between nodes 5 and 6 in the network shown in figure 3.3.
Subscriptions (phases 2 and 3)
When a spanning tree is available, the efficient broadcast method is used to propagate node 4’s subscription to all other nodes (message sub a). Node 1’ subscription
24
Figure 3.2: An example of a distributed barrier
Figure 3.3: 0 subscribes to A, then 5 fires e with e ∈ A. Event flooding method induces
several duplicates and false positives.
25
Figure 3.4: Event-filtering algorithm prunes efficiently the network connectivity so that the
broadcasted events are forwarded only toward interested nodes
is propagated through the same method but this subscription is filtered by node 4,
according to the method explained in section 3.6.2. These subscriptions propagation
allows the pruning of the spanning tree to obtain the bottom topology in figure 3.4,
dynamically for each event fired in the system.
Event propagation (phase 4)
The fourth phase shown in figure 3.5 shows the propagation of an event matching
subscription b through the network, using the pruned spanning tree (message event
e).
Unsubscriptions (phase 5 and 6; optional)
Fifth phase illustrates the propagation of unsubscription from b issued by node 1
(message unsub b). Again in accordance to the algorithm described in section 3.6.2,
this unsubscription is filtered. The last phase illustrates the node 4’s unsubscription
from a (message unsub a). This unsubscription is not filtered and thus, is broadcasted
through the entire system.
Building a spanning tree There are several ways to calculate a spanning tree. Gallager
et al. [26] propose a distributed algorithm to calculate a minimal-weight spanning tree.
Malek et al. [36] also propose an algorithm to calculate spanning trees and reduce the
messages overhead. It argues the method proposed by Gallager et al. [26] induce too much
communications and is not suitable to energy-constrained systems like sensors network.
The method described in [36] features the calculation of an “almost” minimal spanning
trees, an energy constraints-friendly algorithm and the possibility to repair the spanning
tree in case of failing or joining nodes.
The method implemented in filtering-based algorithm to calculate a spanning tree remains very simple. It is represented in the first part of figure 3.5. The process relies on
nodes pushing spanning tree requests (spt_req on figure) as well as marking nodes and
their channels. A channel can be marked as being part or not of the spanning tree, and
marked as being evaluated or not about its belonging to the spanning tree. The algorithm
works as follow:
• A unique node initiates the spanning tree calculation. It marks itself as being already
integrated to the spanning tree and broadcasts through all its available channels a
26
spanning tree calculation request (spt_req in figure 3.5), where the root is the node
itself.
• All nodes receiving a spanning tree calculation request check their own state: if
they are marked as being already part of the spanning tree, they immediately reply a
negative answer (message refuse). Otherwise, they mark the channel from which the
spanning tree calculation request was received from as being evaluated and part of
the spanning tree, mark themselves as being integrated in the spanning tree, and send
a spanning tree calculation request through all channels not already marked. If no
marked channel is available, then is sends back a positive answer (message accept).
• When it receives an answer, a node marks the channel through which the answer was
received as being evaluated. If the answer was positive, then it marks this channel
as being part of the spanning tree. Otherwise it does nothing. When all channels
are evaluated, a positive answer (message accept) is sent through the channel from
which a spanning tree calculation request was received and the algorithm stops for
this node.
When the algorithm ends, all nodes run a distributed barrier to make sure they don’t
start to route subscriptions and notifications before all other nodes are also ready to forward
them in the right direction.
3.4 Implementation details
Figure 3.6 represents the static relationships between all elements available in the publish/subscribe system. Their behavior is described in the previous section and this section describes their implementation. Notice the existence of two classes implementing the
event_core interface. They provide implementations for both event flooding and filtering
algorithms. Similarly, single_attribute class implements a subscription model.
3.4.1
PublishSubscribe class: the publisher/subscribe interface to user
This section introduces the front-end interface of publish/subscribe algorithm, as to be used
in a modular robot’s controller. This is intended to programmers who want to take profit
of publish/subscribe system in their work. It provides all the methods required to interact
with a publish/subscribe system, such as firing events or expressing a subscription through
the network. This implementation relies on the Event_core interface (described in section
3.6).
It is interesting to notice that nowhere in this class are defined the data structures event,
subscription, unsubscription and internal. These data structures and their methods of manipulation (initialization, serialization or deserialization) are highly dependent on the underlying subscription model thus they are separately defined in each different implementations.
The role of this class also includes distributed synchronization: it makes all nodes in
the network to start the algorithm at the same time, using a distributed barrier described in
section 3.3.1. This class also handles the incoming messages reception, transforms them to
data structures thanks to methods provided by the Event_core interface before transferring
them to the actual publish/subscribe algorithm through the same interface.
Available methods
void e v e n t _ i n i t i a l i z e ( ) ;
27
Figure 3.5: Interactions between nodes when subscribing, unsubscribing and firing events
through the network (network as shown in figure 3.3).
28
Controller
PublishSubscribe
event_publish(event): int
event_subscribe(sub, event_handler): int
event_unsubscribe(sub): int
event_wait(): int
event_reset(): int
Barrier
sub: class
notif: class
barrier_set(barrier, unsigned char): void
barrier_ready(barrier): int
barrier_merge(barrier, barrier): int
<<interface>>
Event_core
event: class
subscription: class
unsubscription: class
internal: class
event_core_reset(): int
event_core_publish(event): int
event_core_subscribe(sub, event_handler): int
event_core_unsubscribe(sub): int
event_core_receive(event, char)
event_core_sub_receive(subscription, char): int
event_core_unsub_receive(unsubscription, char): int
event_core_internal_receive(internal, char): int
event_core_internal_send(internal, char): int
event_core_wait(): int
Event_filtering
event: class
subscription: class
unsubscription: class
internal: class
Event_flooding
event: class
subscription: class
unsubscription: class
internal: class
<<interface>>
SubscriptionModel
sub: class
notif: class
subscription_union(sub, sub): sub
subscription_inter(sub, sub): sub
subscription_minus(sub, sub): sub
subscription_covers(sub, sub): char
subscription_match(sub, notif): char
subscription_null(sub): char
Single_attribute
Figure 3.6: Class diagram the implementation. Note that exactly one publish/subscribe
algorithm and subscription model can be chosen at compile-time.
29
Gets the publish/subscribe algorithm to be initialized. Should be used only at module
initialization time.
i n t event_publish ( event ) ;
Publishes the given event data structure among the network.
i n t e v e n t _ s u b s c r i b e ( sub , e v e n t _ h a n d l e r ) ;
Spreads out a subscription in the network. Also associates an arbitrary function to the
reception of events matching this subscription.
i n t e v e n t _ u n s u b s c r i b e ( sub ) ;
Spreads out a unsubscription through the network, and dissociates the function from events
matching this subscription.
void event_display ( event ) ;
Prints out on terminal a string representation of the event.
int event_wait ( ) ;
Stops the current thread until the publish/subscribe algorithm is fully initialized. This function behaves and returns the same value as sem_wait(sem_t∗). Take care to call it or call
event_trywait() only once, as a second call without a previous reinitialization results in an
endless thread pause.
int event_trywait ( ) ;
Tests if the algorithm is fully initialized. If yes, returns 0; otherwise returns another value.
The return value is identical to the methods sem_trywait(sem_t∗). This function returns 0
only once after the algorithm has been initialized. Any other attempt to call this method or
event_wait() without a previous reinitialization results in a failure (returned value different
from 0).
int event_reset ();
Initiates a global publish/subscribe algorithm reinitialization, in all modules composing the
modular robot.
30
3.4.2
Subscription model interface
This interface provides all the services an implementation for a subscription model should
provide. This includes arithmetic operations on sets such as intersections or inclusions, as
well as publish/subscribe-specific operations such as subscription_match(noti f , sub).
c h a r s u b s c r i p t i o n _ n u l l ( sub s ) ;
This function must return true if the subscription is null. A subscription is null when both
conditions described in equations 3.1 and 3.2 are satisfied. These conditions are equivalent.
∀n ∈ N : ¬match(s, n)
s ∩ N = 0/
(3.1)
(3.2)
sub s u b s c r i p t i o n _ i n i t i a l i z e ( ) ;
The implementation of this function returns a new subscription. This new subscription is a null subscription according to conditions described in equations 3.1 and 3.2. A
subscription returned by this function is always evaluated as null.
s u b s u b s c r i p t i o n _ u n i o n ( s u b s1 , s u b s 2 ) ;
This function returns a subscription matching all interests of s1 as well as all interests
of s2 , as described in equation 3.3.
union(s1 , s2 ) = s1 ∪ s2
(3.3)
s u b s u b s c r i p t i o n _ i n t e r ( s u b s1 , s u b s 2 ) ;
The intersection operation between two subscriptions s1 and s2 allows to get a subscription matching all interests s1 and s2 have in common. This operation is described in
equation 3.4. If the output subscription is not null, then s1 and s2 are said to intercept each
other.
inter(s1 , s2 ) = s1 ∩ s2
31
(3.4)
s u b s u b s c r i p t i o n _ m i n u s ( s u b s1 , s u b s 2 ) ;
The minus operation between s1 and s2 results in a subscription with all subscriptions
from s1 except the ones also in s2 . This operation is showed more formally in 3.5
minus(s1 , s2 ) = {x|x ∈ s1 ∧ ¬(x ∈ s2 )}
(3.5)
c h a r s u b s c r i p t i o n _ c o v e r s ( s u b s1 , s u b s 2 ) ;
This function implements the covering property of a subscription over another one, as
shown in equation 3.6. A subscription s1 is said to cover a subscription s2 if all notifications
in s2 are also in s1
∀n ∈ N : n ∈ s2 ⇒ n ∈ s1
(3.6)
c h a r s u b s c r i p t i o n _ m a t c h ( sub , n o t i f ) ;
This function allows to know if a notification matches a subscription. This is a central
function in content-based publish/subscribe systems, as it allows the algorithms to decide
whether or not they have to accept a notification, and through which channel they have to
forward it. A notification matches a subscription if the point it defines in the notification
space, belongs to the subscription’s subset; equation 3.7 gives a more formal definition of
what property this function allows to know.
match(s, n) = n ∈ s
(3.7)
c h a r s u b s c r i p t i o n _ s u b _ s e r i a l i z e ( sub , c h a r ∗ ) ;
char s u b s c r i p t i o n _ n o t i f _ s e r i a l i z e ( notif , char ∗);
This allows to turn a subscription or a notification data structure into a sequence of
bytes describing this data structure. Such a sequence is then sent through the robot’s communication channels.
32
Deserialization
c h a r s u b s c r i p t i o n _ s u b _ d e s e r i a l i z e ( sub ∗ , c h a r ∗ ) ;
char s u b s c r i p t i o n _ n o t i f _ d e s e r i a l i z e ( n o t i f ∗ , char ∗);
Turns a sequence of bytes into a subscription or a notification. This is the exact reverse
operation as serialization.
void s u b s c r i p t i o n _ s u b _ d i s p l a y ( sub ) ;
void s u b s c r i p t i o n _ n o t i f _ d i s p l a y ( n o t i f ) ;
Implements a representation of subscriptions or unsubscription to be displayed on the terminal, if any.
3.4.3
Single attribute implementation
Publish/subscribe communications offer various subscription models among which topicbased and content-based represent popular implementations. Topic-based presents a very
simple mechanism, easy to implement and run. On the other hand content-based systems
are much more powerful, as they allow a very wide expressiveness in fine interests for some
particular events.
The subscription model implemented in this class represents a trade-off between topicbased and content-based systems. It aims to take profit of topic-based simplicity, while
keeping content-based’s more general scheme. In other words, it eases the implementation
but leaves the possibility to switch to a more complete model in the future. It consists in
a content-based system having only one attribute. In that sens, it is exactly equivalent to
topic-based systems. However, it behaves as a content-based system, since notifications and
subscriptions are not represented by a topic but a notification subspace. This subscription
model is called “single attribute subscription model”.
This section defines the general elements provided by the single attribute subscription
model. No confusion must be made between a subscription (sub class) which describes a
notification subset and a subscription message (subscription class), the content of a message sent between nodes to express a subscription. The latter differs for every different
publish/subscribe implementations, which provide their own specific additional features.
Elements in single attribute subscription model
The following sections give a common basis for the subscription model used in all algorithms implemented in this work. It provides some information about how different
event-based basic features described in sections 2.4 and 2.5 are implemented in this work.
However, this is only a global description and different algorithms may use additional data
structures they require to work properly. These algorithm-specific features are described in
sections dedicated to these algorithms.
Notification space Content-based systems are all based on a notification space. In topicbased systems, this notification space is the set of all topics available in the system. So
is the notification space in the single attribute subscription model. By analogy to topicbased systems, every element in notification space can be assimilated to a topic. In the
implementation, notification space is represented by a 32 bits integer, where each bit is one
particular topic.
33
sub i n i t i a l i z e ( ) {
return 0;
}
Figure 3.7: C code for subscription initialization in single attribute subscription model
sub n u l l ( sub s ) {
r e t u r n s 1 == 0 ;
}
Figure 3.8: C code to check if a subscription is null in single attribute subscription model
Subscriptions Subscriptions express a node’s a particular interested within a certain subspace of notification space. It can be a single point, a subspace or even the whole notification space. In single attribute-based implementation, a subscription is also represented
with a 32 bits integer, where the subspace of interest is expressed through all bits taking the
value 1.
Notifications In content-based systems, a notification represents a single point in notification space. Thus the same goes for the single attribute-based implementation: a notification represents a single bit in the 32-bits integer of notification space. It is expressed thanks
to a number from 0 to 31 denoting exactly one bit of the notification space. As in topicbased subscription model, a notification in single attribute subscription model does not
carry very much valuable information. Instead, the actual payload of a notification must be
joined separately. This feature depends on the publish/subscribe algorithm implemented,
and is introduced in the descriptions of different implemented algorithms.
Implementation of single-attribute model’s operations
This section introduces how the single-attribute model implements different operations required by the subscription model interface. This includes usual data structure management
but also content-based specific manipulations with subscription space and subspace.
Subscription initialization A newly initialized subscription is a subscription that doesn’t
match any event. In single-attribute subscription model, it consists in a subscription which
all 32 bits are 0 so that the match operation always returns false.
Null subscription A null subscription is a subscription that doesn’t match any event. A
newly initialized subscription is null. In single-attribute subscription model, a null subscription is a subscription which all 32 bits equal 0.
Subscription union The union of two subscriptions results in another subscription that
handles all interests from both operand subscriptions. In other words in single-attribute
subscription model, such a union is obtained thanks to a logical OR operation. The code
given in figure 3.9 gives an example of implementation.
34
s u b u n i o n ( s u b s1 , s u b s 2 ) {
r e t u r n s1 | s2 ;
}
Figure 3.9: C code for subscription union in single attribute subscription model
s u b i n t e r ( s u b s1 , s u b s 2 ) {
r e t u r n s1 & s2 ;
}
Figure 3.10: C code for subscriptions intersection in single attribute subscription model
Subscription intersection The intersection of two subscriptions forms a subscription
which expresses all interests in both operand subscriptions. In single attribute subscription
model, this is a logical AND operation as C code shown if figure 3.10.
Subscription difference The difference between two subscriptions results in a subscription having all interests of the first operand subscription, except the ones also in the second
subscription. This operation is achieved thanks to the logical equation 3.11.
Subscription coverage A subscription s1 covers a subscription s2 if all interests expressed in s2 are also expressed in s1 In single attribute, this means that all bits at 1 in
s2 must also be at 1 is s1 . In figure 3.12, the comparison to −1 allows to make sure all
bits are indeed 1 (a numeric c variable which all bits are 1, equals −1 due to low-level
representation of negative numbers).
Matching notifications A notification matches a subscription if the point it expresses is
included in subscription subspace. This is defined in single attribute implementation, as the
bit in a 32-bits word denoted by the notification, to be 1 in the subscription.
3.5 Barrier: distributed synchronization among nodes
Nodes receive, manipulate and send messages called “barriers” to exchange knowledge
about what other nodes in the network are ready to work. A node keeps this message and
manipulate it thanks to different methods and incoming messages. These methods allows
the node to mark itself as ready, assimilate the knowledge carried by an incoming message
as well as to check from its own knowledge, if all other nodes are ready.
s u b minus ( s u b s1 , s u b s 2 ) {
r e t u r n s1 & ~s2 ;
}
Figure 3.11: C code for subscription difference in single attribute subscription model
35
c h a r c o v e r s ( s u b s1 , s u b s 2 ) {
r e t u r n ( s 1 | ~ s 2 ) == −1;
}
Figure 3.12: C code for subscriptions’ covering property in single attribute subscription
model
c h a r match ( s u b s , n o t i f n ) {
r e t u r n s & ( i n t ) ( 1 << n ) ;
}
Figure 3.13: C code for matching notifications against subscriptions in single attribute
subscription model
void b a r r i e r _ s e t ( b a r r i e r , unsigned char ) ;
Marks the node which id is given, as ready in the given barrier.
int barrier_ready ( barrier );
Checks whether or not all nodes are ready, according to the knowledge carried by the given
barrier message.
int barrier_merge ( barrier , barrier );
Merges the second barrier into the first one. Typically the first barrier parameter is the
node’s internal knowledge and the second is a message received from a neighbor. Eventually after several merges, the first barrier would be tested as ready according to the previous
method barrier_ready(barrier);.
3.6 Event_core class: interface for algorithms’ implementations
The event_core class provides all methods a publish/subscribe implementation needs to
provide so that it can be used by the PublishSubscribe class (see figure3.6). These methods
include publish/subscribe-related methods such as publish and subscribe methods as well
as methods handling the reception of events, subscriptions, unsubscriptions and internal
messages. This interface also defines methods for initialization, reinitialization and local
barrier used to stop the controller until the algorithm is ready to work.
int event_core_initialize ();
Initializes the algorithm. This is run only once and only during module’s initialization.
This function is never called again when the algorithm in reinitialized.
36
int event_core_reinitialize ();
Reinitializes the algorithm. This function is run immediately after event_core_initialized()
but can also be called again when a module receives a reinitialization signal. This function
is called before any message related to algorithm’s reinitialization can be received. It may
be used to set the module in such a state that it can answer consistently to other modules
communicating with it for their own reinitialization.
int event_core_reset ();
Reinitializes the algorithm at the initialize of this module. This method is systematically
called after event_core_reinitialize() but not necessarily right after. Here may be the right
place to initiate a conversation with neighbors modules, if needed in reinitialization.
i n t event_core_publish ( event ) ;
Manages to spread out an event through the network. The publish/subscribe implementation may fill or alter the event data structure.
i n t e v e n t _ c o r e _ s u b s c r i b e ( sub , e v e n t _ h a n d l e r ) ;
Manages to spread out a subscription through the network, and associates the subscription
to a function which will be run each time a matching event is received.
i n t e v e n t _ c o r e _ u n s u b s c r i b e ( sub ) ;
Manages to spread out an unsubscription through the network, and dissociates the function
previously associated to it.
i n t e v e n t _ c o r e _ r e c e i v e ( event , char ) ;
This function is triggered when an event is received. This is the right place to match
the received event with a local or a distant subscription, run the appropriate associated
functions or/and forward it through the network.
i n t event_core_sub_receive ( subscription , char ) ;
Run when a subscription is received. This function may be assimilate the subscription in a
routing table, then forward it according to the algorithm.
i n t event_core_unsub_receive ( unsubscription , char ) ;
Handles the reception of an unsubscription. Its role may be similar to event_sub_receive()
but it handles unsubscriptions instead of subscriptions.
37
event e v e n t_c o r e _d e s e r ial ize ( char ∗ , i n t ) ;
Deserializes an event from its byte array form, to an event data structure. This interface
does not require the complementary function, though it is more than likely to be necessary.
s u b s c r i p t i o n event_core_sub_deserialize ( char ∗);
Deserializes a subscription from its byte array form, to a subscription data structure. This
interface does not require the complementary function, though it is more than likely to be
necessary.
unsubscription event_core_unsub_deserialize ( char ∗);
Deserializes an unsubscription from its byte array form, to an unsubscription data structure.
This interface does not require the complementary function, though it is more than likely
to be necessary.
i n t e r n a l e v e n t _ c o r e _ i n t e r n a l _ d e s e r i a l i z e ( char ∗);
Deserializes an internal communication packet from its byte array form, to an internal
communication packet data structure. An internal packet in used in communications not
directly used to publish, subscribe or unsubscribe, but may be useful to initialize the algorithm. Event filtering algorithm use these internal packets to build a spanning tree. This
interface does not require the complementary function, though it is more than likely to be
necessary.
i n t event_core_internal_receive ( internal , char ) ;
Run when an internal message is received.
i n t event_core_internal_send ( internal , char ) ;
Allows the sending of an internal message through a channel.
int event_core_wait ( ) ;
Stops the calling thread until the algorithm has finished to be initialized or reinitialized.
Implementing this function thanks to a semaphore is a good idea. This function should
return the same value as sem_wait();
int event_core_trywait ( ) ;
Tests if the algorithm is initialized and ready to work. Returns a positive answer only
once after it has been started or restarted. The returned value must be similar to the
sem_trywait(), and could also be implemented with a semaphore.
38
Figure 3.14: Packet broadcasted in a cyclic network unable to detect duplicates may be
forwarded indefinitely: step 6 is similar to step 3. After step 6, the network takes the state
shown in step 4.
void event_core_display ( event ) ;
Displays an event in a text-based representation on the terminal.
3.6.1
Event flooding algorithm
This section explains the implementation of the flooding algorithm, represented in figure
3.6 as the class “Event_flooding”. Event flooding has been briefly introduced in section
2.6.1. This simple algorithm consists for publishers in firing every events through all available channels. Subscribers filter incoming notifications according to their own interests.
All nodes in between forward every notifications they receive through all available channels but the one the notification was received from. It is obvious that this strategy generates
a big amount of network traffic, and a significant part of this traffic is useless. However
event-flooding may presents several interests: its simplicity makes it robust and less errorprone; therefore it reduces the chances of software failure. Also, since it does not require
to store other nodes’ interests, the amount of memory it needs to work is rather low.
As this algorithm is very simple, there are issues to handle underlying network characteristics. The following section introduces how this implementation handles network cycles
when managing communications.
Cycles management
Cycles in network topologies introduce more complexity in message broadcasting. The
phenomenon illustrated in figure 3.14 makes broadcasted messages to be indefinitely repeated through the network. In structured networks, this problem is fixed by detecting
duplicated packets. Every packets received from another channel than the one in the shortest path leading to its issuer, is considered as a duplicate ([50, page 371]). However the
underlying network in Atron does not provide this information.
Another way to detect duplicate packets consists in making nodes able to recognize a
packet it has already received. However, storing and comparing every received message
may induce several issues:
• The required memory is significant and grows as long as new messages are received.
It is impossible to store and recognize new packets once the memory is saturated.
• Comparing exhaustively all received packets with all stored packets may be a long
and difficult task. It may make the overall performances to drastically drop.
39
Figure 3.15: An example of the packet memory list.
As a consequence, storing and comparing every packets received is not a realistic solution. This is especially right in modular robot: embedded software and tight hardware
constraints result in a small amount of available memory and poor processing capabilities.
A practical solution to duplicate detection A solution to duplicate detection is based
on the idea described in section 3.6.1: it lies in recognizing, or not, every new incoming
packet. However, the differences with the former solution are listed below:
• The memory allocated to store events is limited to a fixed sized list. When this list is
saturated, then an incoming packet is stored on the beginning of the list.
• A node does not actually store the whole received packets, but only their issuer as
well as a serial number. Therefore each packet stored uses only a fixed limited size
in memory.
This is an approximate solution: a list stores all received packets’ issuer and serial
number. If a new packet is received when the list is already full, this new packet’s issuer
and serial number replace the first value in the list, and so do the following packets with
the list’s following cases.
When a packet is checked for having or not be already received, the node browses the
list from its beginning to the last case having a value (search length in figure 3.15. If it can
find a pair issuer/serial identical to the values from the packet received, then this packet is
considered as a duplicate.
Limitations The use of an approximate solution introduces the possibility of errors
in duplicates detection: it may not recognize as duplicate a packet which has actually been
already received. This solution to duplicate detection relies on two assumptions to guarantee every duplicate packets can be detected. First it assumes every packets are sent with its
issuer’s id as well as a unique serial number. When emitting a packet, it is the issuer’s duty
to make sure it joins it’s own id and a different serial number for each different emitted
packet. Second, the list must be long enough to handle every packets circulating in the
network at the same time. If the list is too short, a new incoming packet might override the
older received one, making the node to forget about it. If this old packet is still circulating
in the network and reaches again this node, then it is not detected as a duplicate.
The first assumption is relatively easy to implement: in each packet’s header is included
its issuer’s id, and a serial number. This serial number can be an integer incremented each
40
Notification
Notification point
Issuer
Serial
Content
Content length
typedef s t r u c t {
notif
type ;
event_content
content ;
unsigned char i s s u e r ;
unsigned char s e r i a l ;
int length ;
} event ;
Figure 3.16: A C structure describing an event message in event flooding publish/subscribe
algorithm.
time the node sends a new packet. However, the second constraint is much more difficult to
satisfy: it requires to know the maximum number of packets which can be circulating in the
network and willing to reach the same node at the same time. As this number remains very
hard to estimate, a good way to get a minimal working value could consists in running the
network with the worst possible conditions, and increase the list’s length until the network
behaves as expected.
Duplicate detection and event-flooding algorithm Event-flooding algorithm is based
on flooding every notification received through all existing channels, and check if this notification matches its own subscriptions. As described in figure 3.14, this can make the same
notification to be delivered several times to the same node. A forwarder or a subscriber
must be able to detect notifications it has already received so that it doesn’t broadcast or
process it again. This way a fired notification doesn’t not circulate forever in the network.
As expressed in section 3.6.1, notifications must then encapsulate their issuer’s id as
well as a serial number, and the list’s length can be set to a minimal working value by testing the algorithm under the worst possible working conditions. In event flooding publish/subscribe algorithm, such conditions could be defined as the conjunction of the following
features:
• A high number of nodes in the network.
• A high network connectivity, with a lot of cycles and many different possible routes
between two different nodes.
• A high rate of simultaneous communications; in event flooding publish/subscribe, it
means every node fire an event at the same time.
Data structure
Event flooding only manipulates events by firing, forwarding and filtering them. There is
no matter of forwarding subscriptions or unsubscriptions. Therefore only events have a
useful data structure.
Figure 3.16 shows all information contained in a flooding-based pub/sub algorithm.
Type allows to match this event with a subscription so that it is possible to filter it. Content,
which length is bounded by length, provides the actual content of the event, as the single
41
attribute subscription model does not allow to carry so much information in the event’s
topic itself. At last, issuer and serial are the two fields allowing the detection of duplicates
thanks to the method described in section 3.6.1.
3.6.2
Event filtering-based strategy
In this section is described the algorithm implemented in “Event_filtering” class on figure
3.6. Event-filtering routing algorithm belongs to deterministic algorithms, in the sens that
it relies on a deterministic routing table to take the decision on where is it relevant to
forward a notification or not forward it at all. If its behavior is therefore deterministic, then
its performances may be affected by underlying network’s dynamic connectivity. This is
especially true concerning deliveries correctness. The general mechanism of filtering-based
routing algorithm is well known and described in [14]. However, it may be relevant to adapt
it to the particular context of modular robots and more precisely networks formed by Atron
modules. The following sections provide a notice when such adaptation is relevant.
The algorithm
The idea behind the event-filtering is rather simple: subscribers broadcast their interests,
and while a node receives this broadcast, it also notes what subscription comes from what
channel. This subscription is then associated to the channel, and the channel is associated
with the union of all subscription received through it. This information allows it to know
in what direction are nodes interested in an event matching this subscription. In other
words, it builds a routing table using reverse path learning. That way, events are no longer
broadcasted to all nodes in the robot, but only to the interested ones.
Initialization Consider the underlying physical network as the one in the top of figure
3.4. The algorithm is initialized by calculating distributed a spanning tree as explained in
section 3.6.2.
Broadcasting and forwarding subscriptions The basic principle consists in making every node to be responsible of all events it has received a subscription for. When a node n
receives a subscription s through its channel c, the following process occurs:
1. Check if the subscription associated with channel c covers the subscription s. If it
covers it, then it means n already forwards events expressed in subscription s. s is
therefore not forwarded.
2. If s is not covered, n subscribes to all information it needs to satisfy s. It does
so by checking each of its channels except c. For each of them, it checks what
subscriptions it has already sent through it and sends a subscription requesting the
missing notification subset. Note it is possible that on all channels but c, n has
already subscribed to the right events. In this case, n doesn’t subscribe to anything,
but carries on with step 3.
3. Integrate the subscription in the event routing table. Integrating a subscription in
routing table consists is associating the subscriber’s id as well as channel c with
the subscription. If a subscription already exists for this issuer, then the incoming
channel c is updated and the associated subscription becomes the union of the already
existing subscription and newly received one.
Step 1 requires to calculate if the subscriptions associated to c covers s. Subscriptions
associated to c are kept in memory (see below) and the principle of subscriptions covering
each other is described in sections 3.4.2 and 3.4.3. Step 2 iterates on all available channels
being part of the spanning tree (set B) except c (Bc in equation 3.8). For each channel
42
Bc = B \ {c}
(3.8)
Sd = {x | ∀x ∈ N ∧ ∀e ∈ C : ∃e ∈ Bd ∧ x ∈ Ue }
Fd = s \ Sd
(3.9)
(3.10)
• C: Set of all available channels.
• B: Set of all channels part of spanning tree.
• Bc : Set of all channels part of spanning tree, minus channel c.
• Ue : Union of all subscriptions received through channel e.
• Sd : Union of all subscriptions sent through channel d.
• Fd : Final subscription forwarded through channel d.
Figure 3.17: Only the green part of s in forwarded through channel d
d in Bc , it calculates what subscriptions have already been sent through (Sd in equation
3.9). Then it removes Sd from s as shows equation 3.10 (assuming Ue is the union of all
subscriptions received through channel e). It happens to be equivalent to the operation
minus(s, Sd ). If the resulting subscription Fd is not a null subscription, then it sends it
through channel d. This is also shown in figure 3.17. Step 3 memorizes in event routing
table the new subscription for node i. If pi,c is the previous subscription for node i through
channel c and si,c the received subscription, the new subscription is given by pi,c ∪ si,c .
Broadcasting and forwarding notifications Once subscriptions have been spread out
through the network, broadcasting an event e is a relatively easy task. An event is sent
through every channel c which associated subscription Uc matches e. In other words, the
decision whether send or forward an event e through channel c or not, depends on the
equation 3.11.
e ∈ Uc
(3.11)
When a node fires an event, it iterates on all its channel, verify the property 3.11 and
send it through it if the test succeeded. Forwarding an event is very similar, except a node
forwarding an event doesn’t forward it through the channel it has received this event from.
For a given event e fired by a node p, and subscribers s1 , s2 and s3 interested in e
(which subscriptions match e), a new network layer is dynamically and implicitly formed,
from pruning the spanning tree and keep only links between event e’s publisher and all
interested subscribers. An example of such a “layer” is shown at the bottom of figure 3.4.
Broadcasting and forwarding unsubscriptions Forwarding unsubscriptions is a similar process to forwarding subscriptions. Again, each node is responsible for forwarding
43
Figure 3.18: In step 1: Sc is the union of all subscriptions associated to channel c except the
one from unsubscription’s issuer. In step 2: Sc is all the subscriptions sent through channel
c except the one from the unsubscription’s issuer. In both steps, Sissuer is the subscriptions
previously expressed by the issuer. Step 1 succeeds, or in step 2 the unsubscription is
forwarded through channel c, if the black area is not a null subscription. The black area is
then considered as being the actual unsubscription.
notifications to interested nodes. To that purpose, it maintains its routing table as small
as possible, and send unsubscriptions about a notification subspace as soon as it no longer
needs events matching it. As in forwarding subscription, the algorithm takes place in three
steps:
When receiving an unsubscription s through channel c:
1. Checks if the unsubscription changes how the notifications will be forwarded after
unsubscribing. If the black part on figure 3.18 is null, then the unsubscription has no
effect and the process is stopped.
2. Send through each channel in spanning tree except c, an unsubscription from the no
longer needed notification subset.
3. Remove the notification subset carried by the unsubscription received, from the
record in event routing table associated with unsubscription’s issuer.
The goal in step 1 consists in calculating what part of unsubscription is actually worth
to process. If the resulting unsubscription is null, then the algorithm stops. If it is not, both
steps 2 and 3 are processed. The actual unsubscription (which is forwarded) is calculated
thanks to equations 3.12 and 3.13. In step 2, if the actual unsubscription is not null, then
for each channel d in broadcast tree, equation 3.15 computes the unsubscription to be sent
through it, in order to perform unsubscription received from issuer i through channel c.
Step 3 consists in removing the unsubscription ui,c from subscription previously associated
with i. If pi,c is the previous subscription associated to node i and channel c, then its new
subscription is pi,c \ ui,c .
Atron’s specifics Atron’s particular characteristics makes every channels to lead to
/ Step 1 is therefore
at most one neighbor node. As a consequence, Ri,c always equals 0.
reduced to calculate the intersection between the unsubscription received through channel
c and previous subscriptions associated to it. The result of intersection must be different
than 0/ so that the algorithm continues.
Cope with network dynamics A central point of communication in network which
connectivity is constantly changing, consists in coping with this permanent topology changes.
Obviously with this event filtering-based method, a problem lies with maintaining both
spanning tree and event routing table.
The basic solution to manage such dynamic connectivity, consists in reinitializing the
algorithm when a node realizes a change occur ed in network topology. When this happens,
the node spreads out a reset request. This request is broadcasted to all nodes using a flooding method. Every node receiving such a reset request wipe event routing table, recompute
44
Ri,c
actual
ui,c
Si,d
sent
ui,c,d
= {x | ∀x ∈ N ∧ ∀m ∈ Mc : x ∈ sub(i) ∧ m 6= i}
(3.12)
= (sub(i) \ Ri,c ) ∩ ui,c
(3.13)
= {x | ∀x ∈ N : ∃e ∈ Bi ∧ x ∈ Ri,d }
(3.14)
= (sub(i) \ Si,d ) ∩ uactual
i,c
(3.15)
• ui,c : Unsubscription received from issuer i through channel c.
• uactual
: Actual unsubscription from Ui,c after step 1.
i,c
• usent
i,c,d : Unsubscription sent through channel d when forwarding unsubscription ui,c .
• Si,d : Subscriptions previously sent through channel d, except the one issued by module i.
• sub(m): Subscription associated to node m.
• Mc : Set of neighbor modules through channel c.
• Ri,c : Set of subscriptions received from channel c, except the ones issued from node
i.
a spanning tree and broadcast again their own subscriptions only (not the one they used to
be responsible for).
Main data structure
Section 3.4.3 presents the data structures and operations as implemented for single attribute
subscription model. As described in the previous sections, event filtering-based algorithm
needs more information than notification subsets or points, so that to work properly. This
section introduces actual data structures used in event-filtering algorithm. These data structure include single attribute model’s data structures, or any other subscription model that
may be used.
Routing table The algorithm maintains an event routing table thanks to which it is possible for it to route events but also to dynamically cope with successive subscriptions and
unsubscriptions. This is three different possible use case for the routing table.
When forwarding notifications, nodes only rely on the union of subscriptions received
through the same channel c (named Uc ). In order to route notifications, the algorithm needs
Uc for each c in the set B of all available channels in spanning tree. Broadcasting subscriptions does not require more information, as all decisions are all based on subscriptions
associated to channels as a whole.
However, unsubscriptions induces a greater complexity: considering two nodes n1 and
n2 connected to a same node n through a same channel c, and which subscriptions intercept each other. If n1 unsubscribes from a notification subset n2 has subscribed to, then
removing the notification subset carried by n1 ’s unsubscription from Sc in node n might
affect event deliveries to n2 while it should not. Therefore, unsubscriptions require every
nodes to keep in memory what subscriptions every individual neighbor node has itself, subscribed to. This finer knowledge still allows to compute Uc whenever needed. It also allows
to manage neighbors’ unsubscriptions without affecting other neighbors linked through the
same channel.
Figure 3.19 gives a representation of an entry in the routing table. Issuer represents a
node’s id; it is likely to be an integer. Channel represents the channel from which the last
45
Subscription table entry
issuer
channel
subscription
typedef s t r u c t {
char i s s u e r ;
chan c h a n n e l ;
sub s u b s c r i p t i o n s ;
} sub_table_entry ;
Figure 3.19: A representation of an entry of an event filtering-based routing table, and its
equivalent in C.
Subscription
Notification subset
Issuer
typedef s t r u c t {
sub sub ;
char i s s u e r ;
} subscription ;
Figure 3.20: A data structure for subscriptions and its modelisation in C.
subscription from issuer has been received through. Again, a channel’s identifier is likely to
be an integer. Finally, subscription represents the notification subset issuer has subscribed
to. This data structure is given by the subscription model implemented. Supposing it uses
the single attribute implementations introduced in section 3.4.3, this is a 32-bits integer.
Considering a node can have at most c channels, each channel allowing to directly contact
at most n neighbor nodes, the complete routing table contains c × n entries.
However, the nature of peer-to-peer network in Atron-based modular robots present
particular properties. Among them is the number of nodes accessible through the same
channel, which is at most 1. In addition, all modules in a Atron-based modular robot are
similar, and consist of 8 communication devices or channels. Therefore on Atrons, n = 1
and c = 8 so there are 8 entries in its routing table, regardless how many modules the
whole Atron-based robot is composed of. Also, since only one node is reachable through a
given channel, either channel or issuer is a redundant information and one of them can be
removed from the routing table.
Subscription As described in section 3.6.2, the event filtering algorithm needs subscriptions issuers’ id so that it can set up an event routing table. Therefore, every publishers join
their id with their subscription. Figure 3.20 shows a subscription in a event filtering-based
publish/subscribe network. It carries the issuer’s id (an integer) as well as the publisher’s
interest. This latter field in the data structure depends on the subscription model employed;
the use of single attribute subscription model means this field is a 32-bits integer.
The previous section shows that on Atrons, either node’s issuer or incoming channel is
redundant. As the incoming channel is always known, the issuer field in subscriptions for
event filtering-based algorithm could be ignored and removed.
46
Notification
Notification point
Content
Length
t y p e d e f u n s i g n e d c h a r e v e n t _ c o n t e n t [EVENT_MAX_LENGTH ] ;
typedef s t r u c t {
notif
type ;
event_content content ;
int length ;
} event ;
Figure 3.21: A data structure for notifications and its modelisation in C.
Unsubscription
Notification subset
Issuer
typedef s t r u c t {
sub sub ;
char i s s u e r ;
} unsubscription ;
Figure 3.22: A data structure for unsubscriptions and its modelisation in C. Note its similarity to data structure for subscriptions (figure 3.20).
Notification The section 3.6.2 shows how simple is forwarding a notification using the
event routing table. The only useful information is the notification itself, as the one described in section 3.4.3. However, the use of single attribute subscription model means
the notification doesn’t carry very much useful information. Therefore, a notification also
includes a field “content”, a sequence of bytes, where any useful information can be joined.
Another field, length, can also specify how long is the sequence of bytes for notification’s
content. Figure 3.21 gives a representation for notifications in event filtering algorithm.
Unsubscription In event filtering algorithm, an unsubscription is roughly equivalent to a
subscription. The only difference is the data structure type’s name, which allows to make a
distinction between a subscription and an unsubscriptions. As shown in the section 3.6.2,
the event filtering algorithm only needs to know the unsubscriber’s id (the issuer) as well
as the unsubscription set. An unsubscription for event filtering algorithm is shown in figure
3.22.
As for subscriptions, the issuer field becomes redundant and useless when event filtering algorithm is run on Atron-based modular robot. An Atron module doesn’t need
any unsubscription’s issuer’s id when receiving an unsubscription through a given channel,
since only one module can communicate through that channel.
3.7 Conclusion
Two algorithms are implemented for atron modular robots. A first one is based on event
flooding: a simple algorithm, yet it requires a mechanism to handle a network with loops.
47
This mechanism introduces complexity to this algorithm supposed to be very simple. It may
even cause it to commit mistakes in event deliveries: it can deliver several times the same
event if too much events are circulating at the same time, and if its memory is too small to
store and recognize all of them. This section also describes in details the implementation
of filtering-based or routing table-based algorithm, and show in details all the complexity
involved in this technique. However, it doesn’t provide any solution for this algorithm, so
that it can handle efficiently a dynamic underlying network.
48
Chapter 4
Experiments
4.1 Introduction
This section describes the measurement of performances for algorithms which implementations is described in section 3. An algorithm’s efficiency is measured along several characteristics such as its complexity (spatial or temporal) or how much communication it generates. Here the algorithms are designed for modular robots: an important feature for them
is scalability. Scalability is the ability to keep properties of efficiency on modular robots
composed of an high number of modules. In this section is a description from survey in [8],
on what features are relevant to measure. It also describes the performances measurement
methodology implemented in this work as well as the results obtained when testing implemented algorithms. This section closes with a conclusion where the results are discussed.
4.2 Relevant features to measure
Legatheaux Martins et al. [34] define a correct routing algorithm as an algorithm without
false negative. A false negative is a missing delivery of an event to an interested node.
On the other hand, an optimal algorithm is an algorithm with no event deliveries to nodes
having not expressed any subscription matching it; this is called false positives. The main
issue consists in finding the happy middle between improving routing notifications to hosts
(reduce or eliminate false negatives and false positives) and reducing calculation, memory
consumption and communication overhead. This latter characteristic is critical to make the
communication system usable with a high amount of nodes in network.
Baldoni et al. [8] suggest three features to consider when evaluating a routing algorithm:
• Message overhead: Amount of messages sent by the system when sending either notifications or subscriptions. A convenient measure for message overhead is message
“hops”: the number of links a messages strives to reach all its recipients.
• Memory overhead: Amount of information every individual node has to memorize
to ensure the routing algorithm can work properly. Mostly related to subscription
memorization by each node, so that it can forward notifications.
• Subscription language limitation: The routing algorithm can limit expressiveness of
subscriptions the system can handle.
Beside, when evaluating a publish/subscribe system for dynamic networks, several conditions of functioning must be considered, along different dimensions:
• Underlying network dynamics: nodes failing, leaving, joining or changing location,
affect network’s connectivity.
49
• Dynamics regarding nodes interests with live subscriptions and unsubscriptions. It
affects publish/subscribe-level network topology and can induce false positives or
false negatives.
• Different publishers/subscribers ratio, especially for stochastic-based routing algorithms. How they can manage a small number of subscriber with numerous publishers, the contrary situation or a more balance ratio.
• Number of nodes in the network: test of event routing system’s scalability. A event
routing algorithm shows good performances with a couple of dozen nodes, which
drastically drops with a network composed of hundreds or thousands nodes.
An ideal event routing algorithm assures every events take the shortest path to reach all
its subscribers, and not any other node (no false positives nor false negatives). In addition,
it must guarantee this property regardless of dynamic reconfigurations both in underlying
network and subscriptions and unsubscriptions. It must work with a low, an high or a
medium publisher/subscribers ratio, and be equally efficient in small and big networks.
4.3 Measurement methodology
Performances are measured along several different possible features concerning a robot’s
characteristics. These characteristics can be the number of modules it is composed of (section 4.3.1), or the use it makes of publish/subscribe communications (section 4.3.2). A
system can be composed of a restricted number of subscribers and many publishers, on the
contrary many subscribers and a limited number of publishers, or a more balanced publishers/subscribers ratio. When measuring performances, both these aspects are considered for
all algorithms analyzed.
The performances measurement focuses on the ratio between the number of emitted
messages (subscriptions/unsubscriptions or notifications) and the number of nodes. This
ratio can be counted in two ways:
Mean message count per module in the global robot
This mean value would be obtained by counting the global amount of messages sent
in the global modular robot, divided by the number of modules. This procedure
would be repeated several times and a global mean and standard deviation can be
extracted from all these repetitions. A low standard deviation would denote the algorithm’s behavior is stable.
Mean and standard deviation in message count for each individual module.
This method would focus on counting, for each module, how many messages it has
sent. The mean value from this counting method denotes how much communication the network has to handle. The standard deviation can also give information
about how this communication load is distributed among the nodes: a low standard
deviation means the load is evenly balanced and a high value denotes a bottleneck.
Measuring false positives and false negatives remains very hard: depending on algorithms, subscriptions can be not expressed at all, or expressed in answer to a previous
incoming subscription. This makes difficult to monitor the network, listen to matching
subscriptions, unsubscriptions and notifications and correlate them to detect false positives
and false negatives.
50
Figure 4.1: Three modules compose a unitary tile and its associated network topology.
Figure 4.2: A robot composed of 3×1×3 tiles, or 27 modules; notice the network topology
has a lot of cycles.
4.3.1
Performances along number of modules in a robot
Simulations in performance measurements involve robots which size is expanded along
successive simulations. A growing number of modules allows the measurement of impact
the number of modules composing a robot has on the overall algorithms’ performances.
Robots in simulations are composed of one or several unitary tiles as the one shown in
figure 4.1. These tiles are organized into a rectangular parallelepiped; figure 4.2 represents
a 3 × 1 × 3-tiles example. A robot composed of several such tiles is a robot which physical
network is dense and composed of several loops. This characteristic represents a good
challenge for the algorithms to be tested, as they has to cope with many cycles.
As the number of modules grows, the distance between publishers and subscribers may
also grow. The same goes for the number of publishers and/or subscribers. A growing
number of modules may therefore lead to a growing amount of communication overhead,
depending on the algorithm and the scenario of use of publish/subscribe system, as section
4.3.2 describes it.
51
Subscribers
Publishers
Few
Many
Few
1
2
Covering
3
5
Many
Non-covering
4
6
Table 4.1: 6 different possible scenarios in the use of a publish/subscribe system.
4.3.2
Performances along publishers/subscribers ratio in the system
When simulated several times, the same robot configuration can produce very different
network overheads for the same publish/subscribe algorithm. The differences can come
from a different use of the publish/subscribe system, like the number and the ratio of publishers and subscribers. Table 4.1 illustrates six different possible scenarios. Covering
and non-covering express the fact that every subscribers’ subscriptions cover each other,
or they don’t intercept each other at all. This may influence the algorithms’ performances.
Different scenarios may give an advantage on one algorithm over the other.
Scenario 1 In scenario 1, there are only one subscriber and one publisher. Both of them
publish and subscribe about the same topic. Both are situated at opposite corners in the
robot’s structure. This scenario makes both algorithms to generate a few traffic, because of
the small amount of subscribers and publishers.
Scenario 2 The second simulation scenario involves one module subscribing to a topic.
All other modules publish notifications matching this topic. The subscriber is expected
to receive them all. This exposes flooding-based algorithm to much worse performances,
compared to event filtering algorithm.
Scenario 3 In this scenario, every modules but one subscribe to the same topic. The
remaining module publishes about this topic and this topic is expected to reach once every
other modules. This scenario does not give more advantage or disadvantages to one or
other event routing algorithms.
Scenario 4 This scenario involves again one publisher and all other modules as subscribers. Subscribers subscribe to a different topic, each topic not intercepting each other.
Only one module is interested in the notification fired by the publisher. This big number
of different subscriptions makes this filtering-based algorithm working in bad conditions
compared to the flooding-based one, very comfortable with a unique publisher.
Scenario 5 In scenario 5, half of the modules subscribe to the same topic, and the other
half of modules publish about this topic. Subscribers and publishers are evenly spread out
in the robot. Every subscriber must receive every notifications. This scenario allows event
filtering algorithm to take profit of similar subscriptions, whereas it makes event-flooding
to flood many events as in scenario 2.
Scenario 6 Scenario 6 is similar to scenario 5, except subscribers subscribe to topics not
intercepting each other. All publishers also publish topics in which only one subscriber is
interested. Every subscriber must receive exactly one notification, except if the number of
modules is odd and their is one more subscriber than publishers. This scenario gives both
algorithms a disadvantage.
All these scenarios may show algorithms’ strengths and weakness when subscribing or
publishing. Some scenarios may be in favor of an algorithm and penalize the other, and
some other scenario may reverse the advantage.
52
Initialization and synchronization
Algorithms initialization and synchronization can also induce a lot of network overhead.
Both algorithms use distributed barriers as described in section 3.3.1 which floods messages
in the network. Also, event filtering method employs a loop-free broadcast tree obtained by
pruning the physical network’s connectivity. This spanning tree can be calculated thanks
to the method described in section 3.6.2.
The cost of this initialization in term of network overhead is analyzed by counting the
number of barrier or spanning tree-related packets, function of the number of modules in
the robot.
4.3.3
Performances along the number of events sequentially fired
A realistic use of a publish/subscribe system consists in one or several modules firing several notifications (dozens, hundreds or thousands) after the system has been initialized.
This variant can be played in all scenarios described in section 4.3.2.
Firing several notifications might affect the performances of one algorithm compared
to another. A few events fired may prove event flooding more efficient because of the
expensive initialization of filtering algorithm. However this ratio can be reversed when
the number of events fired makes the expensive event flooding approach to generates more
messages than filtering algorithm’s initialization.
4.3.4
Performances along event firing rate
A controller using a publish/subscribe system can fire events both from time to time and
very frequently. A very high event firing rate can lead to poor performances or even errors.
An example of error due to a too high number of messages circulating in the network in
explained in section 3.6.1. It shows flooding technique’s possible limitation in duplicate
detection. It may have a bad behavior when too much messages are received at the same
time, such as indefinitely letting messages to circulate in a loop.
4.4 Algorithms performance and comparison
4.4.1
Experimental measurements of messages count
Experimental setup
Measurements are run thanks to a simulator for modular robots[16], where communications
are monitored. However, memory limitations in the simulator prevents the simulations of
robots bigger than a 3 × 1 × 3-tiles robot (robot in figure 4.2). It is able to simulate a virtual
modular robot (Odin, Atron and more) as well as run a controller for them. The simulator also allows to monitor communications, thus it eases algorithms’ message overhead
measurement.
The measurement consists it counting the mean message per module in the global robot,
as the first message counting method described in section 4.3. All six scenarios for each
different robots are simulated 30 times.
Experimental measurement
Running the experiments produces the graphs shown in figure 4.1. They show that flooding
method generate a lot of messages for notifications and subscriptions amount remains zero.
This can be expected as event flooding-based method does not use subscription messages
at all. On the other hand, event-filtering algorithm generates a significant amount of subscriptions. However, when many nodes subscribe to the same topic, this tendency tends
53
to be lowered. Event notifications in filtering-based approach generates a messages traffic
almost constant or not growing very much with the number of modules in the simulated
robot.
First simulation clearly shows that flooding method generates more traffic (including
both notifications and subscriptions) than filtering-based approach. This is due to the flooding approach that makes every nodes to broadcast messages through all their channels. If
filtering approach also uses broadcast for subscriptions, simulation 1 shows that this broadcast generates far lower messages than flooding algorithm. The message overhead induced
by filtering’s algorithm to route events does not compensate this difference.
The second simulation outlines this differences. This scenario clearly shows limitations
of flooding-based algorithm when having to cope with multiple successive notifications. In
flooding approach, publishing more events for a unique subscriber makes all nodes to forward the same messages several times. Filtering method make these events to be forwarded
toward the recipient, directly, and toward them only. As a consequence and comparatively
with filtering method, message traffic for event flooding-based algorithm raises very fast.
Third simulation stresses the behavior of event filtering algorithm, when several nodes
have to subscribe to the same topic. The curve 4.1(c) demonstrates that the subscription
filtering feature of filtering algorithm limits efficiently the broadcast of subscriptions: it
stays far lower than message traffic due to events propagation with flooding technique. The
total number of messages (notifications and subscriptions) is also much lower for event
filtering approach than event flooding.
Fourth simulation on the other hand shows the limitation of filtering capabilities of
filtering algorithm. When every nodes subscribe to different topics, all these subscriptions
have to be broadcasted to all nodes; one broadcast per node’s subscription. This is the
worse possible scenario for event filtering-based strategy, where even event flooding-based
method seems to be more efficient.
Fifth simulation allows to have a comparison on the behavior of event flooding-based
and event filtering methods in a disadvantaging scenario for both algorithms. On one hand
event flooding strategy has to handle multiple notifications, and on the other hand, filteringbased method has to manage multiple similar subscriptions. The simulation’s results shown
in figure 4.1(e) demonstrates the better performances of event filtering algorithm.
Sixth simulation aims to reproduce fifth simulation, but making worse the situation
for event filtering method. Not only many nodes subscribe, but their subscriptions do not
intercept each other. However, figure 4.1(f) shows that event-filtering method still shows
better performances than event-flooding algorithm.
Unexpected peak Figures 4.1(c) and 4.1(d) show a peak when the amount of modules
reach 18, then a drastic fall. This is an unexpected result, as the number of notification
message is supposed to drastically grow with the number of modules. Running more simulations, hundred times or more per scenario and robot configuration could make different
results. Figure 4.2 obtained running 5 times each simulation, tries to show the possible
results of such an attempt; however, this experimentation should be run much more times
to get reliable results.
The small number obtained from the simulations could be the result of a too short
running time for simulation. An attempt could also consist in running more simulations,
letting them more time before stopping them. This way all messages could have the time
to be spread out. However, every simulation already runs 15 seconds, which should be far
enough to spread out both all subscriptions and all notifications.
Message count related to initialization and synchronization
Figure 4.3 represents the amount of messages due to algorithms initializations and synchronization. Initialization prepares the algorithm before it can actually route subscriptions and
54
event-1pub-1sub
2.5
Flooding interests
Flooding notifications
Flooding total
Filtering interests
Filtering notifications
Filtering total
Mean packet count per module
2
1.5
1
0.5
0
5
10
15
20
25
Module count
(a) Message count functions of module count with scenario 1 (1 subscriber and 1 publisher).
event-Npub-1sub
Flooding interests
Flooding notifications
Flooding total
Filtering interests
Filtering notifications
Filtering total
40
35
Mean packet count per module
30
25
20
15
10
5
0
5
10
15
20
25
Module count
(b) Message count functions of module count with scenario 2 (1 subscriber and several publishers).
55
event-1pub-NsubCovering
Flooding interests
Flooding notifications
Flooding total
Filtering interests
Filtering notifications
Filtering total
3.5
Mean packet count per module
3
2.5
2
1.5
1
0.5
0
5
10
15
20
25
Module count
(c) Message count functions of module count with scenario 3 (1 publisher and several subscribers to a same subscription).
event-1pub-NsubNonCovering
Flooding interests
Flooding notifications
Flooding total
Filtering interests
Filtering notifications
Filtering total
10
Mean packet count per module
8
6
4
2
0
5
10
15
20
25
Module count
(d) Message count functions of module count with scenario 4 (1 publisher and several subscribers to non intercepting subscriptions).
56
event-Npub-NsubCovering
30
Flooding interests
Flooding notifications
Flooding total
Filtering interests
Filtering notifications
Filtering total
Mean packet count per module
25
20
15
10
5
0
5
10
15
20
25
Module count
(e) Message count functions of module count with scenario 5 (several publishers and several subscribers to subscriptions covering each other).
event-Npub-NsubNonCovering
Flooding interests
Flooding notifications
Flooding total
Filtering interests
Filtering notifications
Filtering total
30
Mean packet count per module
25
20
15
10
5
0
5
10
15
20
25
Module count
(f) Message count functions of module count with scenario 6 (several publishers and several subscribers to nonintercepting subscriptions).
Figure 4.1: Message count of flooding-based and filtering-based approaches (synchronization and initialization are not taken into account).
57
event-1pub-NsubCovering
Flooding interests
Flooding notifications
Flooding total
Filtering interests
Filtering notifications
Filtering total
2.5
Mean packet count per module
2
1.5
1
0.5
0
18
19
20
21
22
23
24
25
26
27
Module count
Figure 4.2: The unexpected behavior shown in figures 4.1(c) and 4.1(d) does not always
reproduce.
notifications. For event-flooding method, no initialization is required but filtering-based approach builds the spanning tree in initialization phase. This algorithm induce a significant
amount of messages to be spread out through the network. Synchronization is about the
use of a distributed barrier when all modules in a robot are starting up, or between the initialization and running phase of filtering algorithm. Both flooding and filtering algorithms
use synchronizations.
On figure 4.3, it first obvious that initialization and synchronization generates much
more traffic than both event flooding and filtering algorithms as measured in section 4.1. It
also shows that event filtering-based implementation generates more overhead than event
flooding. This is due to the building of the spanning tree, as well as the use of more
distributed barriers.
4.4.2
Space analysis
This section attempts to evaluate the memory requirement to run publish/subscribe algorithms. This space complexity is evaluated through the number n of modules composing the
modular robot. A complexity of O(n) means the required memory amount is proportional
to the number of modules.
Publish/subscribe algorithm’s space complexity
Event flooding Section 3.6.1 shows that event flooding algorithm requires little memory.
It also shows that it nevertheless has to handle message duplicates. The memory used
for that purpose may be extended while the number of nodes and well as the network
connectivity gets dense or the number of events are fired. As the size of this memory
does not increase directly nor only after the number of modules, its space complexity is
considered as O(1). Also, the memory used to store all local subscriptions does not depend
58
Initialization and synchronization
140
Flooding
Filtering
120
Mean packet count per module
100
80
60
40
20
0
5
10
15
20
25
Module count
Figure 4.3: Message overhead due to initialization and synchronization.
on the number of nodes and is also considered as being O(1).
Filtering routing As explained in section 3.6.2, filtering-based algorithm builds a routing
table which consists in what interests have nodes in the direction of each channel. Also, for
each channel the algorithm stores the individual subscription of each neighbor. Therefore
filtering algorithm uses a routing table consisting of c × b records, where c is the number of
channels and b the number of neighbors directly accessible through the same channel. On
Atron-based modular robots, c is lower than or equals 8, and b is always 1. Neither c nor b
grow with the number of modules in the global robot. Therefore, the spatial complexity of
the filtering algorithm itself is O(1).
In the implementation introduced in section 3.6.2, mores mechanisms are employed
to build a spanning tree as well as synchronize modules. The spanning tree construction
requires every module to mark themselves and their channels, independently from their
neighbors. The amount of required markers is therefore independent from the number of
modules in the global robot, so the algorithm’s space complexity to build the spanning tree
is also O(1).
Actual implementation with synchronization
As explained in section 3.4.1, the pieces of code in PublishSubscribe class (figure 3.6 runs
both a double distributed barrier for synchronization, and a memory buffer to move bytes
from one thread to one another.
This memory buffer is fixed-size, although this size may be increased in situation involving many incoming messages at the same time. This is particularly important when
the network has a high connectivity: distributed barriers as well as underlying publish/subscribe algorithm may make an intense use of flooding. The space complexity for messages
management is considered to be O(1).
59
Flooding
Flooding
Initialization & synchronization
O(n)
O(n)
Algorithm
O(1)
O(n)
Total
O(n)
O(n)
Table 4.2: Space complexity of different algorithms’ implementation.
On the other hand, distributed barriers requires to remember the state of each node in
the robot, thus a memory directly proportional to the number of nodes is necessary. Space
cost for synchronization is therefore O(n).
Other memory required to make the whole algorithm to work are simple integer variables and their spatial complexity does not exceed O(1).
The space complexity of the common code part dedicated to messages reception as well
as algorithms’ synchronization is O(n).
4.5 Conclusion
The complete implementation of a publish/subscribe system is composed of an algorithm
and their synchronization. As described in the previous sections and shown in table 4.2, algorithms’ complexity is O(n) and synchronization is O(n). The complete implementations’
space complexity is therefore O(n).
Sections 4.1 and 4.4.1 describe different scenarios to stress different algorithms’ performances. On one hand scenario 2 features both the worse case for event flooding algorithm
and the best case for event filtering-based method: a few subscriptions and many notifications. On the other hand scenario 4 advantages event flooding and disadvantages event
filtering strategy: many different subscriptions and a few notifications. The most interesting scenarios are scenario 1 featuring the best case for both algorithms (unique subscription
and notification), and scenario 6 which runs the worse case also for both of them (several
distinct subscriptions and several notifications). Scenarios 3 and 5 allow algorithms to combine their own properties with opportunities scenarios offer: few notifications to route on
one hand and filtering similar subscriptions on the other hand.
Event flooding strategy’s performances takes over event filtering-based method results
only when the former is in ideal conditions and the latter in its worse case. All other simulated situations demonstrate a more message-efficient communications management from
event-filtering algorithm. However, measurements show for both algorithms a exponentiallike curve for sent messages count function of number of modules in the robot.
However, section 4.4.1 shows that initialization and synchronization actually consume
much more messages than event routing algorithms themselves. This measure demonstrates
the cost of event filtering approach to make it more efficient that event flooding. However,
algorithms involved in synchronization and calculation of distributed spanning tree is out
of scope of this study.
60
Chapter 5
Conclusions
5.1 Future work
This work mainly focuses on implementing and evaluating different publish/subscribe algorithms. This study is more interested in their efficiency in terms of network communication and how they cope with dynamic networks. However, it provides few solutions to
cope with network dynamics, especially concerning event-filtering strategy. Coping with
dynamic underlying network would mean in that case, to adapt both the broadcast tree and
event routing tables to the changes.
Event flooding strategy may not benefit of any further improvement. In fact beside its
very high cost of functioning, its reliability regarding network topology changes makes it
already ideal: the simplicity of its functioning makes sure every events are delivered to interested nodes. On the other hand concerning event-filtering strategy, lots of improvements
can be done: A better spanning tree algorithm can be implemented like the one described
in [26], or in [36]. The latter solution introduces a solution to repair broken spanning trees
due to nodes’ failure, leaving or arrival. This would allow to carry on with implementing a
filtering algorithm fully able to cope with network topology changes. Finally, gossip-based
algorithms may also be investigated in order to provide an efficient way to handle swarm
modular robots’ communications.
5.2 Conclusion
Publish/subscribe systems represent a well-known approach in computer sciences or in
pervasive computing. These algorithms allow to decouple data producers from data consumers, thus they are suitable in networks where nodes and links are expected to change in
a random way. This is the case of dynamically or self-reconfigurable modular robots: while
the robots function, it is possible the modules physically rearrange (eventually themselves),
affecting the communication network’s topology. Their network can be assimilated to mobile ad-hoc networks (MANETs) and publish/subscribe solution exists for such networks.
No modular robot-related publication describes in detail the design of publish/subscribe
communications. However, the decoupling between publishers and subscribers could drastically ease the development of algorithms for modular robots.
This work investigates on different publish/subscribe algorithms for modular robots and
more particularly for Atron modular robot developed at Mærsk Mc-Kinney Møller Institute (University of Southern Denmark). A first simple approach consists of flooding events
through all communication device whereas a second relies on modules’ subscriptions to
forward efficiently events through the network. Performances measurement in a static environment generally shows drastically better performances for techniques based of event
routing table and efficient event forwarding over pure event-flooding method. However
61
these better performances come to the cost of a much more costly initialization. This to
build a proper loop-free network by pruning links that form loops. Also, no test has been
run in a dynamic network and event routing table-based solution’s performances might
suffer a lot more from it than the flooding method.
62
List of Figures
1.1
1.2
1.3
1.4
1.5
Fukuda’s cellular robot . . . . . . . . . . . . . .
Two modular robots . . . . . . . . . . . . . . . .
Polybot chain-type robot in a wheel configuration
An atron robot and an atron module. . . . . . . .
Multiple configurations makes different networks
2.1
2.2
2.3
Channelization problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Split the notification space in cells and map them to groups . . . . . . . . . 17
Notification space composed of two numeric attributes . . . . . . . . . . . 18
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3.10
3.11
3.12
3.13
3.14
3.15
3.16
3.17
3.18
3.19
3.20
3.21
3.22
Deployment diagram of the publish/subscribe system on an atron robot.
An example of a distributed barrier . . . . . . . . . . . . . . . . . . . .
Event routing example for flooding algorithm . . . . . . . . . . . . . .
Pruning the physical connectivity in filtering algorithm . . . . . . . . .
Nodes’ interactions with filtering algorithm . . . . . . . . . . . . . . .
Class diagram of the implementation . . . . . . . . . . . . . . . . . . .
C code for subscription initialization . . . . . . . . . . . . . . . . . . .
C code to check if a subscription is null . . . . . . . . . . . . . . . . .
C code for subscription union . . . . . . . . . . . . . . . . . . . . . . .
C code for subscription intersection . . . . . . . . . . . . . . . . . . .
C code for subscription difference . . . . . . . . . . . . . . . . . . . .
C code for subscriptions covering . . . . . . . . . . . . . . . . . . . .
C code for matching notifications . . . . . . . . . . . . . . . . . . . . .
Packet broadcasted in a cyclic network without duplicate detection . . .
An example of the packet memory list. . . . . . . . . . . . . . . . . . .
C structure for an event in flooding algorithm . . . . . . . . . . . . . .
Only the green part of s in forwarded through channel d . . . . . . . . .
Filtering unsubscriptions in filtering-based algorithm . . . . . . . . . .
Entry of an event filtering-based routing table . . . . . . . . . . . . . .
A data structure for subscriptions and its modelisation in C. . . . . . . .
A data structure for notifications and its modelisation in C. . . . . . . .
A data structure and its modelisation in C . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
24
25
25
26
28
29
34
34
35
35
35
36
36
39
40
41
43
44
46
46
47
47
4.1
4.2
4.1
4.2
4.3
A tile of three modules . . . . . . . . . . . . . . . . . . . . . .
3 × 1 × 3-tiled modular robot . . . . . . . . . . . . . . . . . . .
Message count of flooding-based and filtering-based approaches.
Unexpected behavior not always reproduced . . . . . . . . . . .
Message overhead due to initialization and synchronization. . .
.
.
.
.
.
.
.
.
.
.
51
51
57
58
59
63
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
4
5
7
8
List of Tables
4.1
4.2
6 different possible scenarios in the use of a publish/subscribe system. . . . 52
Space complexity of different algorithms’ implementation. . . . . . . . . . 60
64
References
[1] M. Adler, Z. Ge, J. Kurose, D. Towsley, and S. Zabele. Channelisation problem in
large scale data dissemination. In Ninth international conference on, volume Network
protocols, 2001, pages 100–109, 2001.
[2] M. Aguilera, R. Strom, D. Sturman, M. Astley, and T. Chandra. Matching events
in a content-based subscription system. In Eighteenth annual ACM symposium on
principles of distributed computing, pages 57–61, 1999.
[3] E. Anceaume, A.K. Datta, M. Gradinariu, and G. Simon. Publish/subscribe scheme
for mobile networks. In Proceedings of the 2002 workshop on principles of mobile
computing (POMC 2002), pages 74–81, 2002.
[4] ASE.
http://modular.mmmi.sdu.dk/wiki/ase.
URL
http://modular.mmmi.sdu.dk/wiki/ASE.
Open source control library for
modular robots.
[5] S. Baehni, C. Chhabra, and R. Guerraoui. Mobility friendly publish/subscribe. technical report 200488, EPFL, 2004.
[6] R. Baldoni and A. Virgillito. Distributed Event Routing in Publish/Subscribe Communication Systems: a survey (revised version). Technical report, MIDLAB 1/2006 Dipartimento di Informatica e Sistemistica A.Rubert, Università di Roma la Sapienza,
2006. URL http://www.dis.uniroma1.it/ midlab.
[7] R. Baldoni, R. Beraldi, G. Cugola, M. Migliavacca, and L. Querzoni. Structure-less
content-based routing in mobile ad hoc networks. In In proceedings of the international conference on pervasive services (ICPS’05), Santorini, Greece, July 2005.
[8] R. Baldoni, R. Beraldi, S.T. Piergiovanni, and A. Virgillito. On the modelling of the
publish/subscribe communication systems. Concurrency and computation: Practice
and experience, volume 17, pages 1471–1495. 2005.
[9] R. Baldoni, C. Marchetti, A. Virgillito, and R. Vitenberg. Content-based publishsubscribe over sutructured overlay networks. In International conference on distributed computing systems (ICDCS 2005), 2005.
[10] G. Banavar, T. Chandra, B. Mukherjee, J. Nagarajarao, R. Strom, and D. Sturman.
An efficient multicst protocol for content-based publish/subscribe systems. In Proc.
19th IEEE International Conference on Distributed Computing Systems (1999), pages
262–272, 1999.
[11] F. Cao and J.P. Singh. Efficient event routing in content-based publish-subscribe service networks. In 23rd conference on computer communcations (IEEE INFOCOM
2004i), 2004.
65
[12] F. Cao and J.P. Singh. Medym: Match early with dynamic multicast for content-based
publish-subscribe networks. In Proceedings of the ACM/IFIP/USENIX 6th international middleware conference (Middleware 2005), 2005.
[13] A. Carzaniga, D. Rosenblum, and A. Wolf. Design and evaluation of a wide-area
notification service. In ACM transactions on computer systems 3, pages 332–383,
August 2001.
[14] A. Carzaniga, M.J. Rutherford, and A.L. Wolf. A routing scheme for content-based
networking. In Proceedings of IEEE INFOCOM 2004, 2004.
[15] M. Castro, P. Druschel, A. Kermarrec, and A. Rowston. Scribe: a large-scale and decentralized application-level multicast infrastructure. IEEE journal on selected areas
in communications, 20, October 2002.
[16] D.J. Christensen, D. Brandt, K. Stoy, and U. Pagh Schultz. A Unified Simulator for
Self-Reconfigurable Robots. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’08), pages 870–876, Nice, France,
September 22-26 2008.
[17] M Cilia. An active functionnality service for open distributed heterogeneous environments. Phd thesis, Department of computer sciences, Darmstad University of Technology, 2002.
[18] G. Costa, G.P. Picco, and S. Rossetto. Publish-subscribe on sensor networks: a semiprobabilistic approach. In Proceedings of the 2nd IEEE international conference on
mobile ad hoc and sensor systems (MASS 2005), 2005.
[19] P. Costa, M. Migliavacca, G. Picco, and G. Cugola. Introducing reliability in contentbased publish-subscribe through epidemic algorithms. In Proceedings of the 2nd international workshop on distributed event-based systems (DEBS’03), 2003.
[20] G. Cugola and J.E.M: de Cote. On introducing location awarness in publish-subscribe
middleware. In Proceeding of the International Workshop on Distributed Event-Based
Systems (IDCS/DEB’05), 2005.
[21] Y.K. Dalal and R.M. Metcalfe. Reverse path forwarding of broadcast packets, pages
1040–1048. Communication of ACM, 1978.
[22] C. Diot, B. Levine, B. Lyles, H. Kassem, and D. Balensiefen. Deployement issues
for the ip multicast service. IEEE network magazine, special issue on multicasting,
2000.
[23] P.T. Eugster. Type-based publish-subscribe. 2004.
[24] P.T. Eugster, R. Guerraoui, and C. Damm. On objects and events. In Proceedings of
the conference on object oriented programming systems, languages and applications
(OPPSLA), 2001.
[25] T. Fukuda and S. Nakagawa. Dynamically reconfigurable robotic systems. In In
proceedings of IEEE international conference on robotics and automation, volume 3,
pages 1581–1586, Philadephia, P.A., 1988.
[26] R.G. Gallager, P.A. Humblet, and P.M. Spira. Distributed algorithm for minimumweight spanning trees. CM Transactions on Programming Languages and Systems
(TOPLAS), 5:66–77, 1983.
66
[27] R.F.M. Garcia, K. Støy, D.J. Christensen, and A. Lyder. A self-reconfigurable
communication network for modular robots. In Proceedings of the First International Conference on Robot Communication and Coordination (ROBOCOMM’2007),
Athens, Greece, October 2007.
[28] R.F.M. Garcia, A. Lyder, D.J. Christensen, and K. Stoy. Reusable electronics and
adaptable communication as implemented in the odin modular robot. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA’2009),
pages 1152–1158, Kobe, Japan, May 2009.
[29] A. Gupta, O. Sahin, D Agrawal, and A.E. Addabi. Meghdoot: content-based publish/subscribe over p2p networks. In Proceedings of the ACMIFIP/USENIX 5th international middleware conference (Middleware’04), 2004.
[30] C.P. Hall, A. Carzaniga, J. Rose, and A.L. Wolf. A content-based networking protocol for sensor networks. Technical Report CU-CS-979-04, Department of computer
science, University of Colorado, 2004.
[31] Y. Huang and H. Garcia-Molina. Publish/subscribe in a mobile environment. In
Proceedings of the 2nd ACM International workshop on data engineering for wireless
and mobile access (MobiDE), 2001.
[32] S. Kale, E. Hawen, F. Cao, and J.P. Singh. Analysis and algorithm for content-based
event matching. In Proceedings of the fourth international workshop on distributed
event-based systems (DEBS’05), 2005.
[33] G. Kremer, N. Melot, B. Pottier, and A. Plantec. Modeling mobility at process level
for wireless sensor networks. 2010.
[34] J. Legatheaux Martins, Senior Member, IEEE, and S. Duarte. Routing algorithms for
content-based publish/subscribe systems. IEEE communications surveys and tutorials, 12(1), First quarter 2010.
[35] A. Lyder, R.F.M. Garcia, and K. Støy. Genderless connection mechanism for modular robots introducing torque transmission between modules. In Workshop Modular
Robots: State of the Art (ICRA 2010), pages 77–81, 2010.
[36] K. Malek, G. Panduragan, and V.S. Anil Kumar. Distributed algorithms for contructing approximate minimum spanning trees in wireless sensors networks. IEEE
transactions on parallel and distributed systems, 20:124–138, 2008.
[37] R. Meier and V. Cahill. Steam: event-based middleware for wireless ad hoc networks.
In Proceedings of the international workshop on distributed event-based systems (IDCS/DEB’02), 2002.
[38] J. Moy. OSPF Protocol Analysis. RFC 1245 (Informational), 1991.
[39] J Moy. MOSPF: Analysis and experience. FRC 1585 (Informational), 1994.
[40] G. Mülh, L. Fiege, and F.C. Pietzuch. Distributed Event-based systems. Springer
Verlag, Berlin, Germany, 2006.
[41] B. Oki, , M. Pfluegel, A. Siegel, and D. Skeen. The information bus - an architecture
for extensive distributed systems. In 1993 ACM symposium on operating systems
principles, December 1993.
[42] G.P. Picco and G. Costa. Semi-probabilistic publish/subscribe. In Proceedings of
25th IEEE International conference on distributed computing systems (ICDCS 2005),
2005.
67
[43] G.P. Picco, G. Cugola, and A.L. Murphy. Efficient content-based event dispatching
in the presence of topological reconfiguration. In 23rd international conference in
distributed computing systems (ICDCS 2003), pages 234–243, Providence, RI, USA,
19-22 May 2003.
[44] P.R. Pietzuch and J.M. Bacon. Hermes: A distributed event-based middleware architecture. In 22nd International Conference on Distributed Computing Systems Workshops (ICDCSW ’02), 2002.
[45] S. Ratnasamy, Handley M., R. Karp, and S Shenker. Application-level multicast using
content-addressable networks. Lecture notes in Computer sciences 2233, 2001.
[46] A. Rowstron and P. Drushchel. Pastry: Scalable, decentralised object location, and
routing for large peer-to-peer systems. AFIP/ACM International conference on distributed systems platforms (Middleware 2001)., pages 329–350, 2001.
[47] B. Segall, D. Arnold, J. Boot, M. Henderson, and T. Phelps. Content-based routing
with elvin4. In Proceedings of AUUG2K, Canberra, Australia, June 2000.
[48] T. Sivaharan, G. Blair, and G: Coulson. Green: A configurable and re-configurable
publish/subscribe middleware for pervasive computing. In Proceedings of DOA 2005,
2005.
[49] K. Støy, D. Brandt, and D.J. Christensen. Self-reconfigurable robots: an introduction.
The MIT press, 2007.
[50] A.S. Tanenbaum. Computer networks. Upper Saddle River, N.J. : Prentice Hall, 3rd
edition, 1996.
[51] T.G. Team. Achieving scalability and thoughpoyt in a publish/subscribe system (ibm
research report rc23103). Technical report, IBM, 2004.
[52] W.W. Terpstra, S. Behnel, Fiege L., A. Zeider, and A.P. Bushmann. A peer-to-peer
approach to content-based publish/subscribe systems. In Proceedings of the 2nd international workshop on distributed event-based systems (DEBS’03), 2003.
[53] Y. Wang, D. Qiu, G. Das Achlioptas, P. Larson, and H. Wang. Subscription partitioning and routing in content-based publish/subscribe networks. In 16th international
symposium on distributed computeing (DISC’02), 2002.
[54] M. Yim, Z. Ying, K. Roufas, D. Duff, and C. Eldershaw. Connecting and disconnecting for chain self-reconfiguration with polybot. IEEE/ASME transactions on mechatronics, 7(4):442–451, 2002.
[55] E. Yoneki and J. Bacon. Content based routing with on-demand multicast. In Proceedings of the 24th IEEE international conference on distributed computing systems,
workshop on wireless ad hoc networking (ICDCS - WWAN 2004), pages 788–793,
2004.
[56] S.Q. Zhuang, B.Y. Zhao, A.D. Joseph, R. Katw, and J Kubiatowicz. Bayeux: An
architecture for scalable and fault-tolerant wide area data dissemination. 11th Int.
workshop on network and operating systems support for digital audio and video.,
2001.
68