Vehicle Security System Using CAN N.Kavya B.Santhosh Kumar
advertisement

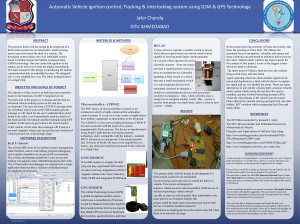
International Journal of Engineering Trends and Technology (IJETT) – Volume 16 Number 3 – Oct 2014 Vehicle Security System Using CAN N.Kavya1, B.Santhosh Kumar2 1 1,2 pursuing M.Tech (ES) , 2Assistant Professor (ECE Department) Visvesvaraya College of Engineering and Technology (VCET), M.P.Patelguda, Ibrahimpatnam, RangaReddy, Telangana, INDIA Abstract: –Avoiding the Vehicle Theft is making real buzz in the present automobile industry. For the design and development of a theft control system, it can be done by making use of GPS feature of mobile phone. The Engine control module is interfaced by using Control Area Network. The developed system is placed in the vehicle which communicates with the Engine control module, by using the GPS. Stolen vehicles can be stopped. Whenever the vehicle owner sends a predefined text from his mobile phone to the GSM module available in the vehicle, according to the received message the vehicle engine is going to be locked immediately. The engine can be unlocked by sending the message again by same owner of the vehicle. The aim of the design is to build the security for vehicles by using embedded system to communicate with the engine of the vehicle. But here we have proposed a new system to find the stolen vehicle and to control the vehicle according the owner’s will. So for that we are going to use Global Positioning System (GPS) to calculate the latitude and longitude values and to send the information to the owner we need to use GSM (Global System for Mobile communication). II.BLOCK DIAGRAM A. Transmitter section: Power supply Keyword: GPS, GSM, MCP2515, MCP2551. I.INTRODUCTION Today world consist of high end technology, through which the control section should be operated with the help of just a remote from the place where we are sitting. When coming to the technology in automobile industry, the different sections in our vehicle such as speedometer and its display, audio and video section, gears display, air condition control, window glass control, controlling the roof of the car, locking of the doors correctly etc are some of the sections to be displayed on the LCD screen available just before driver. So to perform all these in present days we are going to use technology, CAN (Control Area Network). In this technology we are going to control the different sections with the MCP2551 and MCP2515. These are called as CAN transmitter and CAN receiver. By using these we can perform the action of data transmitting and receiving between the different sections. Here our project main theme is to find the stolen vehicle. For that we have prepared the system based on Control Area Network (CAN). This system can be installed can be installed in one vehicle or group of vehicles (fleet of vehicles). This system is used to track the stolen vehicle and also easily find out the position where it is. Initially let us consider when the person’s vehicle has been stolen, so to find the stolen vehicle he has to lodge a complaint at police station. Then the public servants will make an enquiry about that by informing to further police stations. They will search for it. If they have fond it out, they are going to inform us. Or else we have to leave our hopes in finding the vehicle back. ISSN: 2231-5381 LCD module Control Area network PIC16F877A GPS module GSM module Fig1: Block diagram for transmitter section B. Receiver section: Power supply RELAY Control Area network PIC16F877A Fig2: Receiver section http://www.ijettjournal.org MOTOR Page 143 International Journal of Engineering Trends and Technology (IJETT) – Volume 16 Number 3 – Oct 2014 III.BLOCK DIAGRAM DESCRIPTION A. CAN BUS: Here CAN indicate Control Area Network which is used for the communication between two or more devices. It was developed by engineers of BOSCH, who desires were left unfulfilled for 1980. They have come up with this technology as message oriented transmission protocol. It mainly works under Broadcast communication mechanism. Usage in Automobiles: By the usage of the CAN protocol in the automobiles between the control unit and the sensor unit, we are going to achieve the following advantages as a overall unit. B. GSM: GSM is the Global System for Mobile Communication. It is originally called as Group Special Mobile. It is the basic popular standards for the mobile communication in the world. These GSM standards are used by 212 countries and over 3 billion people in the world. In our project we are going to use the GSM in the 2G mode as we need to receive the information from the owner and need to respond according to that. When the owner sends message to the TRANSMITTER kit (GSM), then it uses GPS to calculate the latitude and longitude values and send those values to the owner. If the owner wants to turn off his vehicle engine, he has to send the message the ENGINE OFF to the GSM. Thus our GSM works in that process. 1) Here CAN acts as data highway, because it is going to transmit the information from the control unit to the different section. This process of exchange in takes place on the uniform platform called protocol. 2) Many control units can be implemented efficiently. One of the examples is ESP. 3) We can use copper and optical fibre cables as the transmission media which is permitted by the CAN bus. On the whole this CAN protocol works on the basis of bus network topology, Fig 4: GSM model C. GPS: ECONOMY ECONOMY ECONOMY REGULATOR REGULATOR REGULATOR CIRCUIT CONTROLLER CIRCUIT CONTROLLER CIRCUIT CONTROLLER SENSOR POWER SUPPLY CAN CAN CAN CONTROLLER CONTROLLER CONTROLLER TX RX TX RX TX RX GPS is the Global Positioning System used to calculate the latitude and longitude values of the position where it is placed. It was initially developed by United States Department of Defence. It is also called as NAVASTAR GPS, often for the purpose of navigation system by civilians. GPS is mainly works on satellites. GPS uses a nearly 24 to 32 satellites which emit the micro wave signals, through which location details (latitude and longitude), speed and velocity of the object in which the GPS is placed are also calculated. In our project we are going to use this GPS to calculate the latitude and longitude values. Apart from that this GPS is used to calculate the speed with which the GPS is moving. So its main motto is to send the location details to the GSM whenever the GSM receives the message TRACK. CAN bus Fig3: CAN bus protocol Fig 5: GPS model ISSN: 2231-5381 http://www.ijettjournal.org Page 144 International Journal of Engineering Trends and Technology (IJETT) – Volume 16 Number 3 – Oct 2014 IV.WORKING PRINCIPLE Our main motto is to identify the location of the stolen vehicle. So by using CAN protocol we are implementing the vehicle security. In this design, we have two control boards one consist of GSM, GPS. The second board consist of ECU (Engine Control Unit). Whenever the owner identifies his vehicle has been stolen, then if he wants to identify or track his vehicle location, he has to send text message to the GSM placed in the vehicle. The text message should be “TRACK”. When this message has been received by the GSM then it is going to calculate the latitude and longitude values using GPS and those values are sent to the owner number. If the owner wants to stop the vehicle then he has to send the message as “ENGINE OFF”, then this message will be compared with the predefined message and if both the strings are similar then automatically the information is passed from transmitter section to the receiver section to turn off the engine control unit. V.FLOW CHART START DID VEHICL E STOLE NO YES OWNER HAS SENT THE MESSAGE “TRACK” RECEIVED LATITUDE AND LONGITUDE VALUES. OWNER SENT THE MESSAGE ENGINE OFF. VEHICLE ENGINE HAS BEEN STOPPED STOP Fig6: flow chart for the process flow. ISSN: 2231-5381 VI.CONCLUSION This project provides the most sophisticated control of led lighting and also used to maintain the light glow at different intensities. By using this project we can save the power by making the reduction in power consumption. Thus we used the GSM wireless communication to transmit the information to the receiver section. VII. REFERENCES [1] M. Faisal and J. B. Alam, “Low-Cost rescue robot for disaster management in a developing country: development of a prototype using locally available technology,” NASA Langley Research Publications, Document ID: 20100012838, Apr. 2010. [2] R. Sheh, “The Redback: a low cost advanced mobility robot for education and research,” in the proceedings of IEEE International Workshop on Safety, Security and Rescue Robotics, 2006. [3] R. R. Murphy, “Trial by fire [rescue robots],” in IEEE Robotics & Automation Magazine, Vol. 11, Issue 3, Sept. 2004, pp. 50–61. [4] O. Unver, “Tankbot: A miniature, peeling based climber on rough and smooth surfaces,” in ICRA IEEE Robotics and Automation, May 2009, pp. 2282–2287. [5] T. Kamegawa, T. Yamasaki and F. Matsuno, “Evaluation of snake- like rescue robot KOHGA for usability of remote control,” in IEEE Safety, Security and Rescue Robotics, Jun. 2005, pp. 25–30. [6] C.C. Kessens, D.C. Smith and P.R. Osteen, “A framework for autonomous self-righting of a generic robot on sloped planar surfaces,” in IEEE Robotics and Automation, May 2012, pp. 4724– 4729. [7] [7] T. Fincannon, L.E. Barnes, R.R. Murphy and D.L. Riddle, “Evidence of the need for social intelligence in rescue robots,” in IEEE Intelligent Robots and Systems, Vol. 2, Oct. 2004, pp. 1089–1095. [8] S. Selevan and R. Kwok, “Use of sensors and radio frequency ID for the national children’s study,” Research Triangle Institute Publications, Report No. 08601.001.006, Aug. 2004. [9] C. Benavente-Peces, V. M. Moracho-Olivia, A. Dominguez-Garcia and M. Lugilde-Rodriguez, “Global system for location and guidance of disabled people : indoor and outdoor technologies integration,” in IEEE 5th Int. conference on networking and services, 2009. [10] A. Lhafi, “Haut Commissariat aux Eaux et Forêts et à la Lutte Contre La Désertification,” [On-line] Available : www.eauxetforets.gov.ma/fr/index.aspx [Oct. 10, 2012]. [11] M. Nassih, I. Cherradi, Y. Maghous, B. Ouriaghli and Y. S. Alj, “Obstacles recognition system for the blind people using RFID,” in IEEE 6th International Conference on Next Generation Mobile Applications, Services and Technologies, 2012. [12] H. D Chon, S. Jun, H. Jung and S. W. An, “Using RFID for accurate positioning,” in Journal of Global Positioning Systems, Vol. 3, No. 1–2, 2004, pp. 32–39. [13] S. Burion, R. Clavel and I. Nourbakhsh, “Human detection for robotic urban search and rescue,” in EPFL University press, Report No. LSRO2, 2004. [14] J.M. Rendon-Mancha, A. Cardenas, M.A. Garcia and B. Lara, “ Robot positioning using camera-space manipulation http://www.ijettjournal.org Page 145 International Journal of Engineering Trends and Technology (IJETT) – Volume 16 Number 3 – Oct 2014 [15] [16] [17] [18] with a linear camera model,” in IEEE Transactions on Robotics, Vol. 26, Issue 4, Aug. 2010, pp. 726–733. J. Haverinen, M. Parpala and J. Roning, “A miniature mobile robot with a color stereo camera system for swarm robotics research,” in IEEE Robotics and Automation, Apr. 2005, pp. 2483–2486. Y. Ke, M. Kang, C. Lai, Y. Chuang, Y. Wu and C. Yu, “Solar power battery charger with a parallel-load resonant converter,” in Industry Applications Society Conference Publications, Print ISBN: 978-1- 4244-9498-9 , Nov. 2011, pp. 1–8. L. B. Lave, C. T. Hendrickson and F. C. McMichael, “Clean recycling of lead-acid batteries for electric vehicles,” in Journal of Industrial Ecology, vol. II, Issue 4, 2008, pp. 33–37. G. M. Tina, C. Ventura, P. Arena, L. Patané, A. D. Grasso and M. Pollino, “Design considerations about a photovoltaic power system to supply a mobile robot,” in IEEE Industrial Electronics, Jul. 2010, pp. 1829–1834. ISSN: 2231-5381 VIII. AUTHOR DETAILS http://www.ijettjournal.org N.Kavya,pursuing M.Tech (ES) from Visvesvaraya College of Engineering and Technology (VCET), M.P.Patelguda,Ibrahimpatna m, RangaReddy, Telangana, INDIA B.Santhosh Kumar,working as Assistant Professor & HOD (ECE Department) from Visvesvaraya College of Engineering and Technology (VCET), M.P.Patelguda,Ibrahimpatnam, RangaReddy. He obtained Ph.D in Wireless Communications.He has morethan nine years of Experience in Teaching Field. Page 146