A Pneumatic Muscle Driven Wearable Parallel Robot for Ankle Joint Rehabilitation
advertisement

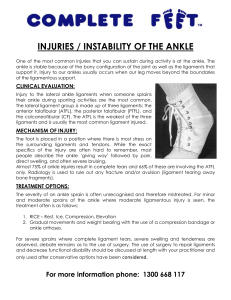
International Journal of Engineering Trends and Technology (IJETT) – Volume23 Number 4- May 2015 A Pneumatic Muscle Driven Wearable Parallel Robot for Ankle Joint Rehabilitation Ms. S. Muthulakshmi #1, Mr. D. Sunderlin Shibu *2 #1PG student, #2 Assistant Professor, Dept. of Biomedical Engineering, Anna University, Udaya School of Engineering, Ammandivilai, Kanyakumari, Tamil Nadu, India. Abstract— Ankle is the most common injuries part in human body because the ankle joint is made up of three bones that are tibia, fibula and talus. These three bones are joining together at the ankle joint by ligaments that will allow normal ankle activity. Tendons join muscles to the bones to do the work of making the ankle and foot movement, along with help keep the joints stable. A sprain which is defines as damage to ligaments when they are stretched or twisted beyond their normal range of motion and fracture is describes a breakage in one or more of the bones. Rehabilitation after surgery involves time and attention to restore strength and range of motion so peoples can return to pre-injury function. This wearable parallel robot designed for ankle rehabilitation process in step by step procedure. Some important performance indices are identified to accomplish the requirements of the ankle rehabilitation treatment and the wearable robot design procedure. Robot design is adaptable to subjects by varying physiological abilities and age groups. The movements of pneumatic muscle actuators are treating the ankle injuries for the rehabilitation aspects. This robot is improving the mobility and flexibility, improving ankle strength, coordination and returning to full fitness. Keywords— PIC microcontroller, pneumatic cylinder, PWM (pulse width modulation), PMA (pneumatic muscle actuators). I. INTRODUCTION The Ankle injuries are very common to all people because ankle joints are very complicated structure in human body and ankle joints are the very important joint of the body. Ankle sprain is a severe injury and its frequency be approximately inbetween 15 and 20% of all sports injury and is the most common in emergency and more than 1 millions of peoples can visit emergency room because of ankle injuries. Ankle sprain and ankle fractures are the most common injuries in ankle joints. Ankle injury is definite by the variety of tissues, bone, ligament (bone to bone connection) (or) tendon (muscle to bone connection) damaged. Ankle sprain may occur when the ankle is turned or warped unexpectedly into any direction then the ligaments cannot able to tolerate the force so the sprain can take place. Sprained ankle otherwise ISSN: 2231-5381 called as ankle scratch, warped ankle, rolled ankle, ankle injuries (or) ankle ligament injury and floppy ankle. If the ankle sprains occur, the blood vessels are damaged so the body fluids are leakage to the surrounding of the ankle joints after that the swelling can occur. In earlier stage the treatment process for ankle rehabilitation is usually simple, comprising elastic bands, wobble boards, and foam rollers. Such rehabilitation devices are typically used in regimens that include exercises both in the clinic and at home. Ankle robot has lightweight but great pneumatic muscle actuators (PMA) which increase skeletal muscles actuation. At the heart of these injuries lies a lack of three important qualities: strength, flexibility, and range of motion. Increasing this quality, that will supports remedial and helps to avoid further injuries. On the other hands the patients should increase their flexibility and potency beyond pre-injury levels. But they are must securely come back to the normal actions and movement. The general rehabilitation program for ankle sprains is carried out in stages. The initial stage of treatment right after injury is considered the acute phase of rehabilitation and is focused on reducing effusion and swelling at the affected to promote healing of the injured tissues. A reduction in effusion can be achieved with elevation, application of ice, and compression. The injured ankle is also often immobilized. However, as prolonged immobilization of the ankle may lead to reduced range of motion (ROM), compounding of sensorimotor deficits and muscular atrophy, the next phase of ankle rehabilitation typically involves ROM and muscle strengthening exercises. The aim of rehabilitation is get back to full function without boundaries [19], [14], [5]. http://www.ijettjournal.org Page 171 International Journal of Engineering Trends and Technology (IJETT) – Volume23 Number 4- May 2015 II. METHODOLOGY An Ankle robot has these essential characteristics are Sensing is an initial steps that is the robot should capable to sense its environment. Here I used U-Slot sensor senses the position of the ankle then it’s given to the robot awareness of its environment. Second step is a movement that is the robot requires being capable to be in motion around its location. The ankle robot is moving on the platform otherwise the robot requests to move. And calculate the robot movements in the full robot moves or half-done moves [13]. The movement of robots are in x, y and z direction. Third one is energy these ankle robot needs to be capable the power itself (electrically powered). The method of ankle robot gets its energy will depend on the movement of actuators [16]. 5v, 12v power supply is given to the ankle robot. A rehabilitation devices needs to some kind of smarts input for activating robot. A programmer gives the smart input in LabVIEW. The robot will have some kind of program for the data receiving. The robot movements are based on the received data. A. Block Diagram and Description LCD PC( Lab VIEW) DRIVER CIRCUIT RS232 PIC 16F877 R E L AY C I R C U I T SCU SLOT SENSOR COMPRESSOR A N K L E R E H A B I L I T AT I O N ROBOT P N E U M AT I C VA LV E P N E U M AT I C CYLINDER moderate medial ankle injuries (ETM2), injuries (CNT FOOT) (or) fracture [6]. severe ankle Fig. 1 Front Panel Selection in LabVIEW Manually select the input that is what kind of injuries the patient’s have and click the day for gradual rehabilitation process. If the patient have mild ankle injuries means to click the ETL1 and click the day. Based upon the day selection the pneumatic cylinder movement controlled and that was fully programmed in PIC 16F877A 2) RC232: The RS-232(X) is a communication cable, commonly used for transferring and receiving the serial data between two devices that is between pc (lab VIEW inputs) and PIC16F877A microcontroller. In the serial port pin3 is transmit (TXD) data from PC LabVIEW input to MAX232 converters and pin2 (RXD) is a receiving data. The MAX232 is performing double action that is transmitting or receives the data between PC to RC232. The drivers give RS-232 voltage outputs (approx. + 7.5 V or -7.5V) starting a single + 5 V supply by on-chip charge pumps and external charging device. It makes a valuable for implement RS-232 in devices or else it doesn’t require any voltages outside from 0 V to + 5 V range [20]. Fig. 1 Block Diagram 1) LabVIEW: LabVIEW (Laboratory Virtual Instrument Engineering Workbench) is a platform for system-designing and development environment in visual programming language from National Instrumentation. Lab VIEW ties the creation of user interfaces (called front panels) into the development cycle [25]. Set the inputs for ankle injuries type that is mild lateral ankle injuries (ETL1), moderate lateral ankle injuries (ETL2), mild medial ankle injuries (ETM1), ISSN: 2231-5381 http://www.ijettjournal.org Page 172 International Journal of Engineering Trends and Technology (IJETT) – Volume23 Number 4- May 2015 preset to a stable voltage. The circuit is prepared for linear voltage regulator 7805 beside with resistors and capacitor with bridge rectifier and diodes. 7812 is widely used for 12V regulator circuits. In this 7812 designed by using two capacitors, one for input and another one for output so that it will achieve fixed regulation. In these ankle robot should reach 12V 1A current by a heat sink plate. Fig. 3 RS232 connected to the PIC16F877 The RS7805 series can provide fixed voltage for ankle rehabilitation robot. The main advantages of these RS7805 are removing the distribution problem, local on card regulation. Protect from overheating, shock and internal current limiting. If enough temperature dropping is provide, it will deliver more than 1A output current. Even though designed part of robot the most part as fixed voltage regulators, these devices can adjust voltages and currents by an external component. 3) PIC16F877: The PIC16F887 is recent advanced products from Microcontroller. A microcontroller is the combination of a microprocessor, memory, input and output ports and some of the special functions like timer, analogue to digital converter, mathematics processor and PWM generator in one chip. A microcontroller will take an input from a device it is controlling hence controls the ankle robot by sending signals to different components in the robot. The PIC16F877 have the below features such as, High-Performance RISC CPU, operating speed is 20 megahertz and 200 ns for instruction cycle, the operating voltage is 4.0-5.5v, the temperature ranges from -40° to +85°C , fifteen interrupt source, and it’s have 35 single word instruction. Some special features are 14.3 Kbytes flash memory, 368 bytes of data SRAM and 256 bytes of data EEPROM, easy programmable by using software. RC oscillator program for code production, sleep mode is available for power save. In peripheral features are 33 I/O (input and output) pins and 5 I/O (input and output) ports that is port A, B, C, D, E. It has 3 timer circuits that are Timer 0, 1, 2. In a Timer0 have 8- bit timer and counter with 8-bit prescaler, Time1 have 16- bit timer and counter with prescaler, Timer2 have 8-bit timer and counter with period register, prescaler, postscaler. And it has 10-bit PWM modules, supports the Parallel Slave Port. The maximum resolution is 200 ns, 8 channel analogy to digital converters are inbuilt. . A 16x2 LCD display is very basic component and is very usually used in different devices and circuits. The reasons are it’s have no limitation for displaying characters, very cheap, easily accessible. 16x2 LCD means it can show 16 characters in 2 rows. PortD of microcontroller was connected to the LCD that is 7 to 14 pin of LCD was connected to the PIC16f877 for reading and displaying the data. The fixed 5V was given to the 5th pin of LCD. Fig. 4 5v, 12v voltage regulator circuit 4) SCU and SLOT sensor: signal conditioning unit is to perform the filtering, amplifying, isolation process and uses in the analogy to digital converters. The slot sensor is to detect the vibration and oscillation in the ankle robot. The main advantage is high resistance to vibration. Slot sensor is to detect small parts in a short distance. The transmission and receiving functions are in one conveyor. A fixed voltage power supply is very much important for electronic devices. In a designing part of 7805 the semiconductor materials are used for regulating fixed voltage and current. If any deviation in the fixed rate means the devices get damaged. These circuits will convert AC to DC. By using voltage regulator DC, the tolerant output will be ISSN: 2231-5381 http://www.ijettjournal.org Page 173 International Journal of Engineering Trends and Technology (IJETT) – Volume23 Number 4- May 2015 before work could be done [3], [17]. The working principle of the pneumatic cylinder as shown in the Fig. 6. Fig. 6 PMA working principle III. RESULTS Fig. 5 LCD Module Interfacing With Microcontroller 5) Relay and Driver Circuit: Relay is a device which allows low power to switch a comparatively high current and voltage on or low current voltage is off. In a driver circuits are used to amplify signals from PIC microcontrollers in order to control power switches in semiconductor devices and also additional functions which include isolating the power circuit and the control circuit, detecting malfunctions, reporting failures and storing to the control system, precaution against failure, analysing sensor signals, and creating auxiliary voltages. 6) Pneumatic Valve and Pneumatic Cylinder: In Controlling of valves is a basic element of any pneumatic system. Selecting the right air valves to control system pressure, direction of flow and rate of flow. Air compressor is a device that converts power (from an electric motor) into potential energy by forcing air into a smaller volume and thus increasing its pressure. This pressurised air was entering into a pneumatic valve. Pneumatic Valve is important to regulate amount of the compressed air to supply to actuator. The actuator is used to convert pneumatic power (electrical) into mechanical power. When the compressed air enters to the pneumatic cylinder then the muscle is enlarged that is the actuator is moving downward direction (x-direction actuators). Whereas when it is being deflated, the muscle turns back to its upward direction. [24], [22], [15]. Here the pneumatic valve have the pressure 1.5-8kgf/cm2 and 4V210-08 model. Pneumatic system is applying force to a gaseous fluid like air and transmits pneumatic pressure all through the fluid and converting the stored energy back into mechanical force, ISSN: 2231-5381 The main objective of this project is to regain strength, flexibility and increasing ankle range of movement. These ankle robots were focused on regain strength and flexibility by taking an ankle exercises. Give exercise to the sprained ankle so that the range of motion will increase while the pain and swelling is decreasing. Physiotherapist assigns different types of ankle injuries exercises that deal with ankle flexibility, strengthening, and balance. The ankle injuries exercises are given by the pneumatic control system development for the Ankle joint rehabilitation. A PWM scheme for a set of pneumatic valves will control pressures and flow rate of the air. Rehabilitation was considers as active setup for the selection of treatment procedure. In this project active mode was desirable since it includes the increase tendons strength and muscles of the ankle, finally recovering pre-injury position. The movement of the ankle joints was pain free level because the ankle robot exercises are step by step procedure. In existing method the ankle flexibility and strengthens are improve by giving the exercise to the ankle and the movements are rotating the foot in circular axis, up and down (planterflexion and dorsiflexion), side to side (inversion and eversion). I have a survey for 100 ankle injured peoples. Based on my survey: more than 40% of peoples are affected by mild lateral ankle sprain ( ETL1), 20% of peoples are have moderate lateral ankle sprain (ETL2), 10% for mild medial ankle sprain, 8% for http://www.ijettjournal.org Page 174 International Journal of Engineering Trends and Technology (IJETT) – Volume23 Number 4- May 2015 moderate medial ankle sprain and more than 20% of peoples are affected by fracture and severe ankle sprain. The ankle sprain and ankle fractures are the most common ankle injuries. So here I used five injuries level settings in the LabVIEW that is ETL1 (Partial tear of a ligament in medial side), ETL2 (Incomplete tear of a ligament in medial side), ETM1 (Partial tear of a ligament in lateral side), ETM2 (Incomplete tear of a ligament in lateral side), CNT FOOT (contusion in the ankle or Complete tear of a ligament) & Fracture (break in one or more bone). If the patients have mild medial ankle injuries, then to select the input ETL1 and click the day1 options in the LabVIEW. Then the movements of pneumatic cylinders are 10counts in x-direction (inversion and eversion), 5 sec gap, 10 counts in ydirection (planterflexion and dorsiflexion), 5sec gap, and 5counts in z- direction these steps are repeated 2 times for first day of treatment. The next day click the day2 option then the ankle robot movements are 15counts in x-direction, 3 sec gap, and 15counts in y-direction, 3 sec gap, and 10counts in z- direction this steps are repeated 3 times. And the 3rd day click the day3 options then the ankle robot movements are 20counts in x-direction, 1 sec gap, and 20counts in y-direction, 1sec gap, and 15counts in zdirection these steps repeated 5 times. A pneumatic cylinder movements (counts in x, y and z direction) and time gap between the x, y, and z are varying based on the injuries level which selected in LabVIEW. In this method, the movements of robot are regaining the strength and flexibility also returns to the pre-injury functions. The robot has successfully treated the ankle injuries for rehabilitation aspect as well as exercise for lower leg paralysed patient. As shown in the below figure for ankle rehabilitation robot. Put the patient ankle to the moving platform and select the injuries type (in LabVIEW). Then the pneumatic cylinders moves based on the selection that will be treat the ankle injuries. ISSN: 2231-5381 Fig. 7 Ankle rehabilitation robot IV. CONCLUSIONS In this project for the patient comfortable the devices is keep with their patient home itself. Because this devices interface with a computer and rehabilitation robot. The ankle robot is ability to perform three directions of the movements. The pneumatic cylinder movements are called as exercise of the injured ankle. These movements of exercise are used to make more effective for relief the ankle injuries, pain and increase the range of motion. The main advantage of this project is gradually increasing the strength, ROM, flexibility and also to prevent further injury of the ankle. The ankle robot control was an easy task by using LabVIEW as a controlling device. Finally the application of rehabilitative device of the robot is required to intractable with the patient. In olden techniques ankle strengthens exercise are more difficult by using towel stretch, step ups, walking on toes and the patient can’t able to balance their ankle in wobble board. In my project I implement this ankle rehabilitation robot methods was very simple, more effective, patient can set the levels easily (selecting the day in LabVIEW) and low risk. http://www.ijettjournal.org Page 175 International Journal of Engineering Trends and Technology (IJETT) – Volume23 Number 4- May 2015 [14] REFERENCES [15] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] A. U. Alahakone and S. M. N. A. Senanayake, (2010) ‘A real-time system with assistive feedback for postural control in rehabilitation’, IEEE/ASME Trans. Mechatronics, vol. 15, no. 2, pp. 226–233. Alpha Agape Gopalai and S. M. N. Arosha Senanayake, (2011) ‘A Wearable Real-Time Intelligent Posture Corrective System Using Vibrotactile Feedback’, IEEE/ASME transactions on mechatronics, vol. 16, no. 5. Bouzit M., G. Popescu, G. Burdea, and R. Boian, (2002) ‘The Rutgers Master II-ND Force Feedback Glove’, IEEE VR 2002 Haptics Symposium, Orlando FL, pp. 145-152. C. P. Chou and B. Hannaford, (1996) ‘Measurement and modeling of McKibben pneumatic artificial muscles’, IEEE Trans. Robot. Autom, vol. 12, no. 1,pp. 90–102. C. E. Syrseloudis and I. Z. Emiris, (2008) ‘A parallel robot for ankle rehabilitation-evaluation and its design specifications’, in Proc. 8th IEEE Int. Conf. BioInf. BioEng., 2008, pp. 1–6. C. G. Mattacola and M. K. Dwyer, (2002) ‘Rehabilitation of the ankle after acute sprain or chronic instability,’ J. Athletic Training, vol. 37, pp. 413–429, 2002. Deutsch, J. E., J. Latonio, G. Burdea, and R. Boian, (2001) ‘Rehabilitation of Musculo-skeletal Injuries using the Rutgers Ankle Haptic Interface: Three Case Reports’, EuroHaptics Conference. Girone, M., G. Burdea, M. Bouzit, (1999) ‘The Rutgers Ankle Orthopedic Rehabilitation Interface’, Proceedings of the ASME Haptics Symposium, DSC-Vol. 67, pp. 305-312. Han Jian-hai , Guo Binjing , Zhao Shu-shang, (2011) ‘Structure design and trajectory control on gait rehabilitation training robot system driven by pneumatic actuators’ Advanced Mechatronic Systems (ICAMechS). Higa, M.L. ; Tawy, D.M. ; Lord, S.M, (2002) ‘An introduction to LabVIEW exercise for an electronics class’, IEEE Conference Publications Volume: 1 Joaquin A. Blaya and Hugh Herr, (2004) ‘Adaptive Control of a Variable-Impedance Ankle-Foot Orthosis to Assist Drop-Foot Gait’, IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol. 12, No. 1. J. L. Pons, (2010) ‘Rehabilitation exoskeletal robotics’, IEEE Eng. Med. Biol. Mag., vol. 29, no. 3, pp. 57–63. J. Yoon et al., (2006) ‘Reconfigurable ankle rehabilitation robot for various exercises’, J. Robot. Syst., vol. 22, pp. S15–S33. ISSN: 2231-5381 [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] L. Chinn and J. Hertel,(2010) ‘Rehabilitation of ankle and foot injuries in athletes’, Clinics Sports Med., vol. 29. Marc Doumit,, Atef Fahim, and Michael Munro, (2009) ‘Analytical Modeling and Experimental Validation of the Braided Pneumatic Muscle’IEEE Transactions on Robotics, Vol. 25, No. 6. M. Girone, G. Burdea, M. Bouzit, V. Popescu and J. E. Deutsch, (2000) ‘Orthopedic rehabilitation using the Rutgers ankle interface’, Health Technol. and Informat., vol. 70. Mahir Hassan and Amir Khajepour, (2011) ‘Analysis of Bounded Cable Tensions in Cable-Actuated Parallel Manipulators’, IEEE Transactions on Robotics, Vol. 27, No. 5. Pengju Sui ; Ligang Yao ; Zhifeng Lin ; Huayang Yan ; Dai J.S, (2009) ‘Analysis and synthesis of ankle motion and rehabilitation robots’, Robotics and Biomimetics (ROBIO), IEEE International Conference . Prashant K. Jamwal, Sheng Q. Xie, Shahid Hussain, and John G. Parsons(2014)’ An Adaptive Wearable Parallel Robot for the Treatment of Ankle Injuries’, IEEE/ASME Transactions on Mechatronics, VOL. 19, NO. 1. Song, E.Y; Nat. Inst. of Stand. & Technol, Gaithersburg, MD; Lee, K.B,(2008) ‘Sensor Network based on IEEE 1451.0 and IEEE p1451.2-RS232’, Instrumentation and Measurement Technology Conference Proceedings, IMTC 2008 IEEE . S. Behzadipour and A. Khajepour, (2005) ‘A new cable-based parallel robot with three degrees of freedom’, Multibody Syst. Dyn., vol. 13. Takaiwa, M. and T. Noritsugu, (199) ‘Application of Pneumatic parallel manipulator as Haptic Human interface,’ IEEE/ASME International Conference on Advanced Intelligent Mechatronics. T. Noritsugu and T. Tanaka, (1997)’Application of rubber artificial muscle manipulator as a rehabilitation robot,’ IEEE/ASME Trans. Mechatronics, vol. 2, no. 4. Tri Vo-Minh, Tegoeh Tjahjowidodo, Herman Ramon, and Hendrik Van Brussel, (2011) ‘A New Approach to Modeling Hysteresis in a Pneumatic Artificial Muscle Using The Maxwell-Slip Model’, IEEE/ASME Transactions on Mechatronics, Vol. 16, No. 1. Ugurlu, Y. Nagano, (2011)’Project-based learning using LabVIEW and embedded hardware’, System Integration (SII), IEEE/SICE Yongfeng Wang; Zhanyong Mei; Jiali Xu; Guoru Zhao, (2012) ‘Kinematic design of a parallel ankle rehabilitation robot for sprained ankle physiotherapy’, Robotics and Biomimetics (ROBIO) IEEE. http://www.ijettjournal.org Page 176