An Area and Power Efficient Glitch-less Digitally Controlled Delay Lines Preethi.D
advertisement

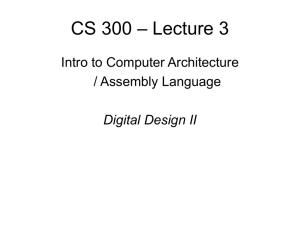
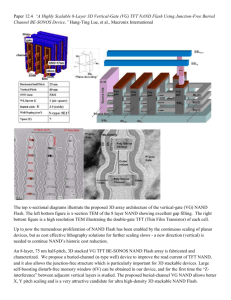
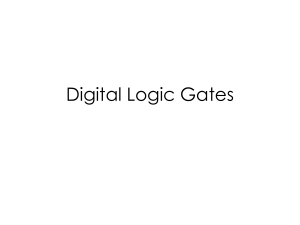
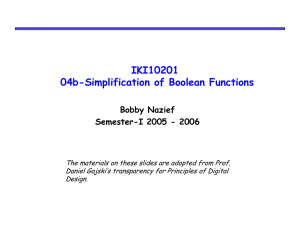
International Journal of Engineering Trends and Technology (IJETT) – Volume 9 Number 14 - Mar 2014 An Area and Power Efficient Glitch-less Digitally Controlled Delay Lines [1] Preethi.D [1] P.G.Scholar, I M.E. VLSI Design, Department of Electronics and Communication Engineering, Avinashilingam Institute For Home Science And Higher Education For Women-University, Faculty Of Engineering, Coimbatore. Abstract - In the previous NAND gate based delay lines, when the control input. They are intended to define a time reference for control code word increased by more than one there were the movement of data within those systems. For e.g., as in occurrences of glitches due to momentary changes in the output PLL system if we require four phase shift of 45o, 90o, 180o which limited the performance of such delay lines in a number of and 270o we can use delay lines programmed to each of the applications. Hence as advancement, the arrangement of the NAND gates were modified to eliminate the glitches by introducing a second control bit and driving circuit to provide delay between the two control bits, to avoid the lack of synchronization. In order to minimize power and area in the above circuit MUX based delay line using thermometric code is proposed. This includes only one control bit but also eliminates above degrees separately using the delay elements. Various delay elements are used to improve the performance of delay lines which includes multiplexers, inverters and NAND [4], [6], [7] gates. A delay chain is constructed using delay cells. In case of multiplexers the glitches without driving circuits. These delay lines are applied in tradeoff between the minimum delay and the required delay the fields of DLL, PLL and UWB. will vary thereby reducing its efficiency in communicating the essential information. Since the tree based multiplexer Index Terms: DLL, Driving Circuits, PLL, Thermometric Code, UWB. topology was used, as the number of cells increases the delay associated with it will also increase drastically. In addition to it the layout complexity and difficulty in fabrication adds to I. INTRODUCTION the above drawback. DCDLs are used in number of applications such as phase locked loops and delay locked loops. They are used to mainly process the clock signals. These lines produce a programmable delay to the output with respect to the input and also adjust the relative difference between the two signals to produce the reliable data transfer. It is also finds its applications in digital- to-analog converter where time domain resolution [3] is given more importance than the voltage resolution. A digital delay line, this includes a plurality of The inverters when used as a delay element in combination with the multiplexers or NAND gates there will definitely be a delay and resolution mismatch which adds on to more delay than required. The use of NAND gates effectively reduces the tradeoff problem and also has regular architecture. This provides very good linearity and resolution as compared with the above delay elements. Hence the further implementations were made using NAND gates. delay elements, arranged in sequence having an associated ISSN: 2231-5381 http://www.ijettjournal.org Page 697 International Journal of Engineering Trends and Technology (IJETT) – Volume 9 Number 14 - Mar 2014 Hazards in any system are obviously an un-desirable The delay lines could be used in the following areas such as: effect caused by either a deficiency in the system or external influences. In digital logic hazards they are of three types namely static, dynamic and functional. This is however a temporary problem and the logic will finally come to the desired function. Despite the logic arriving at the correct output, it is iterative that hazards be eliminated as they can have an effect on other systems. Static are those whose one A. Phase locked loop (PLL): The PLL consists of a voltage controlled oscillator whose frequency is equal to the frequency of the PLL input[7]. The voltage controlling the VCO must monotonically vary with the frequency of input of PLL. input variable changes, the output changes momentarily when it shouldn't. A dynamic hazard is the possibility of an output changing more than once as a result of a single input change and often occurs in larger logic circuits. Function hazards are non-solvable hazards which occur when more than one input variable changes at the same time and cannot be logically eliminated. The one more advantage of choosing NAND gates is that the logical effort is small in this case i.e., 4/3 got by the formula (n+2)/3 where n is the number of inputs. The parallel Fig 2. Block diagram of PLL arrangement of PMOS increases the delay linearly. A PLL consists of a negative feedback loop in which A general block diagram of a delay line is depicted in the output of a phase detector is applied to the control input of the figure 1. Each stage composes of voltage controlled at VCO. The VCO applies a periodic waveform to the phase oscillator, delay element in cascade and output buffers. detector, the phase of which is compared with the phase the input. Delay lines are introduced in such circuits to introduce an optimum delay between the input and output. B. Delay locked loop (DLL): It is as that of a phase locked loop but the only difference is the absence of internal VCO. They are used to change the phase of the signal to enhance clock rise to data output and are also used in clock recovery[8], [9]. Main component is the delay chain containing delay elements connected front to back. The PLL in clock recovery can be Fig 1. Block Diagram of a Delay Line replaced by DLL but the only difference being VCO substituted by a VCDL. The VCDL is adjusted so that the output is phase locked with the input. The design of daelay lines of DLL is simpler than PLL. ISSN: 2231-5381 http://www.ijettjournal.org Page 698 International Journal of Engineering Trends and Technology (IJETT) – Volume 9 Number 14 - Mar 2014 The paper is arranged as follows: the existing method, proposed work, simulation results followed by conclusion. II. EXISTING METHODOLOGY A. NAND based DCDL and Glitching: The occurrence of glitches may limit the performance of delay lines in their applications. In the previously proposed paper NAND gates were used to produce the delay. They have Fig 3. Block diagram of DLL assumed one control bit Si in this paper[3]. C. UWB receivers: When the control code is one: When the control code is one The frontend of these receivers consists of an antenna along with the filters in order to remove the interference in case of FM radios and VHF television signals[12]. The interleaved ADCs will now sample the received signals. A S0:0, S1:1 by the condition that S i= 0 for i < c and Si= 1 for i > c. this condition didn’t cause any glitches. When the control code increased more than one: When the control code is increased by more than one there were single ADC will increase the power consumption, hence occurrences of glitches. The control bit at this stage would be parallel interleaved ADCs are used. The digital backend is S0:0, S1:0, S2=1. Hence there will be momentary change in the used to perform acquisition and synchronization operation output causing a glitch to occur. For e.g., If the input is ‘0’ the followed by tracking and data detection where DCDLs play a output goes to ‘1’ and then gets back to ‘0’(non-inverting vital role. topology). All the lower DE cells are all stuck at ‘1’. Therefore the intermediate signals contribute to glitch[3], [10]. Fig 5 : Glitching When Control Code Is One [3], [10] Fig 4. Block diagram of UWB receivers ISSN: 2231-5381 http://www.ijettjournal.org Page 699 International Journal of Engineering Trends and Technology (IJETT) – Volume 9 Number 14 - Mar 2014 In all the figures the yellow colored NAND gates are This method has produced the output with same active cells and the red colored NAND gates are dummy cells resolution but has reduced the output jitter by reducing the used for load balancing. The dashed lines represent the delay glitches. The figure represents the non-inverting topology path. . The code which is specified in terms of the control where the out is’1’ for the in:’1’. A non inverting delay cell word is called thermometric code. topology is placed in front of the inverting topology. Fig 6 : Glitching When Control Code When Increased More Than One [3], [10] Fig 8: Glitch Free NAND Operation When Control Code Is Two (NonInverting Topology)[1] B. Glitch Free NAND Operation C. Driving Circuit The next proposed method that follows this is to eliminate the glitches from the above network. Hence they have proposed to control bits Si and Ti[1] with the conditions: The driving circuit [13], [14], [15] used here in order to provide a delay between the two control bits is a D Flip-flop. Two D Flip-flops are used and its working as follows: Si= 0 for i < c and S i= 1 for i > c ; Ti =1 for i≠ c+1 and Tc+1 =0. In order to provide a delay between these two bits driving The first D Flip-flop [1] directly gives the input circuits are designed in this paper. The last lower DE cell is (control bit T) to the output (Ti) whereas the second one will stuck at ‘1’ for non-inverting topology and stuck at ‘0’ for get another control bit S and introduces some delay by using inverting topology. When the control code word is two, the three NAND gates and finally gives it at the output (S i). Both control bits S0-1:0, S2:1, T0-2:1, T3:0[3], [10]. Here as the input is the flip-flops are given the same clock input. given ‘0’ the output from the inverting topology is ‘1’. Fig 8: Driving Circuit [1] Fig 7: Glitch Free NAND Operation When Control Code Is Two (Inverting Topology) [1] ISSN: 2231-5381 http://www.ijettjournal.org Page 700 International Journal of Engineering Trends and Technology (IJETT) – Volume 9 Number 14 - Mar 2014 III. PROPOSED METHODOLOGY To reduce the larger area henceforth the larger power The above table1 explains that whenever the control consumption the proposed methodology with multiplexers[2] bit is ‘0’ the data at the input terminal ‘0’ of the MUX will be using thermometric code[1] is proposed. This method also sent at the output and if the control bit is ‘1’ the data at the eliminates the use of driving circuits i.e., the NAND gates input terminal ‘1’of the MUX will be sent at the output. followed by D flip-flops[1]. This architecture replaces 6 B. Inverting Topology NAND gates (4 active + 2 dummy) with just 2 multiplexers+1[2] for providing the turn state. One of the inputs of the last MUX is kept at ‘0’ ensuring that the n-1th state will always carry the data present at the input ‘1’ of the nth bit. As we already discussed in the existing method, both the inverting and non-inverting topology can be constructed. The control bits are based on the same thermometric code as used in existing methodology. A. Non- Inverting Topology Fig 10: Inverting Topology Of MUX For Control Code: 1 The table2 explains that whenever the control bit is ‘0’ the data at the input terminal ‘0’ of the MUX will be sent at the output with an inversion and if the control bit is ‘1’ the data at the input terminal ‘1’of the MUX will be sent at the output with an inversion. Table 2: Operation of MUX in inverting topology Fig 9: Non-Inverting Topology Of MUX For Control Code: 1 Terminal Data 0 1 1 1 Control bit 0 1 MUX output 1 1 The above topology is specified for the control code c=’1’. Here even with one control bit Si we can achieve a glitch free operation. The multiplexers used here are 2:1 MUX, with their select lines being the delay code word. The cascading is in such a way that even when the control code increases by more than one, there will be no glitch because the next stage always depends on the present Table 1: Operation of MUX in non-inverting topology state limiting on the condition that the first delay element though has shorter propagation delay than the second will not Terminal Data 0 1 1 1 Control bit 0 1 ISSN: 2231-5381 MUX output 1 1 produce any intermediate output producing a glitch. http://www.ijettjournal.org Page 701 International Journal of Engineering Trends and Technology (IJETT) – Volume 9 Number 14 - Mar 2014 The number of transistors required to construct a second produces an output earlier to the second. Hence based multiplexer along with an inverter is four, which is same as in on the output from the first delay line the final output will case of NAND gates. The number of transistors as required by experience a momentary change. These glitches do not occur the existing method for one delay element is 24(6 NAND * in the delay lines whenever the control code is ‘1’ since it 4transistors) without considering the driving circuit whereas involves only a single delay element. for proposed method with multiplexers we need only 12 B. Removal of glitches in NAND Based DCDL transistors (3 MUX * 4transistors). IV. SIMULATION RESULTS AND ANALYSIS Software used: Modelsim SE 10.0b & Xilinx ISE 9.1i Scripting: VHDL The results are achieved by coding the programs in VHDL, simulated using MODELSIM SE 10.0b and they are Fig 12: Removal of glitches in NAND based DCDL analyzed with logical reasons. The screenshot in figure 12 shows the absence of A. Presence of glitches in NAND Based DCDL glitches. The glitch free operation is got by introducing a delay to the second delay element by including an additional control bit Ti to the existing control bit Si. This eliminates lack of synchronization between the delay elements, thus eliminating the glitches. C. Removal of glitches in MUX Based DCDL Fig 11: Presence of glitches The above snapshot in figure 11 is got from the non inverting topology of the previously existing NAND based delay lines which causes glitches in the circuit. The output as analyzed shows that when the input is ‘0’ the output should be ‘0’ but at some instances the output momentarily goes to ‘1’ and then comes back to ‘0’. Fig 13: Removal of glitches in MUX based DCDL (Thermometric Code) The reason for the deviation in output producing a The above output is got by implementing the glitch is due to the reason that when the control code is more proposed work. The NAND gates in the existing work are than one, the first delay element having a less delay than the replaced by multiplexers and this also eliminates the need for ISSN: 2231-5381 http://www.ijettjournal.org Page 702 International Journal of Engineering Trends and Technology (IJETT) – Volume 9 Number 14 - Mar 2014 driving circuit, thereby reducing the area and power consumed. There will not be any momentary change in output since the select line of multiplexers is provided by a thermometric code which preserves the intended output. The area and power are calculated using XILINX ISE 9.1i for the proposed glitch less delay line. Fig 16.1: Power(mW) summary for NAND based DCDL Fig 14.1: Area summary for NAND based DCDL Fig 16.2: Power(mW) summary for MUX based DCDL POWER 30.5 30 Fig 14.2: Area summary for MUX based DCDL 29.5 POWER 29 AREA 28.5 1000 950 900 850 NAND MUX AREA Fig 15: Power(mW) comparison for NAND and MUX based DCDL NAND MUX The area has been reduced by 5% and power has been reduced by 3.33% than the existing NAND based delay Fig 15: Area comparison for NAND and MUX based DCDL lines. V. CONCLUSION The NAND and multiplexer based delay lines are reviewed for the glitch parameter when either of these was used as the delay element. The results of both these shows that though the existing NAND based delay lines removes glitches ISSN: 2231-5381 http://www.ijettjournal.org Page 703 International Journal of Engineering Trends and Technology (IJETT) – Volume 9 Number 14 - Mar 2014 introduces area, latency and power complexity. Owing to the 11. bottlenecks in that DCDL, MUX based delay lines using thermometric code was introduced. This topology shows that it 12. had not only eliminated the glitches but also has reduced the area occupied by the circuitry and power consumption. It has replaced six delay elements representing a single control code 13. by just three multiplexers. There is not much latency problems as was present in NAND based DCDLs due to absence of flip- 14. flops. It also provides intended delay to the circuitry without output jitter. 15. VI. REFERENCES 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. S. Damphousse, K. Ouici, A. Rizki, and M. Mallinson, “All digital spread spectrum clock generator for EMI reduction,” IEEE J. Solid- State Circuits, vol. 42, no. 1, pp. 145–150, Jan. 2007. N. Ven Helleputte, M. Verhelst, W. Dehaene, and G. Gielen, “A reconfigurable, 130 nm CMOS 108 pJ/pulse, fully integrated IRUWB receiver for communication and precise ranging,” IEEE J. Solid-State Circuits, vol. 45, no. 1, pp. 69–83, Jan. 2010. B. Nikolic, V. G. Oklobdzija, V. Stajanovic, W. Jia, J. K. Chiu, and M. M. Leung, “Improved sense-amplifier based flip-flop: Design and measurements,” IEEE J. Solid-State Circuits, vol. 35, no. 6, pp. 876–883, Jun. 2000. G. M. Strollo, D. De Caro, E. Napoli, and N. Petra, “A novel high speed sense amplifier based flip-flop,” IEEE Trans. Very Large Scale Integr. (VLSI) Syst., vol. 13, no. 11, pp. 1266–1274, Nov. 2005. B. S. Kong, S. S. Kim, and Y. H. Jun, “Conditional-capture flipflop for statistical power reduction,” IEEE J. Solid-State Circuits, vol. 36,no. 8, pp. 1263–1271, Aug. 2001. Davide De Caro, Senior Member, IEEE, “Glitch-Free NANDBased Digitally Controlled Delay-Lines” IEEE Transactions On Very Large Scale Integration (VLSI) Systems, Vol. 21, No. 1, January 2013. Jean Barbier, Montpellier, “Programmable Delay Line Circuit With Glitch Avoidance”, Patent published on sep.30,2010. R. B. Staszewski, K.Muhammad, D. Leipold, C.-M. Hung, Y.-C. Ho, J. L. Wallberg, C. Fernando, K. Maggio, R. Staszewski, T. Jung, J. Koh, S. John, I. Y. Deng, V. Sarda, O. Moreira-Tamayo, V. Mayega, R. Katz, O. Friedman, O. E. Eliezer, E. de-Obaldia, and P. T. Balsara, “All-digital TX frequency synthesizer and discrete-time receiver for bluetooth radio in 130-nm CMOS,” IEEE J. Solid-State Circuits, vol. 39, no. 12, pp. 2278–2291, Dec. 2004. R. B. Staszewski and P. T. Balsara, All Digital Frequency Synthesizer in Deep Submicron CMOS. New York: Wiley, 2006. P. L. Chen, C. C. Chung, J. N. Yang, and C. Y. Lee, “A clock generator with cascaded dynamic frequency counting loops for wide multiplication range applications,” IEEE J. Solid-State Circuits, vol. 41, no. 6, pp. 1275–1285, Jun. 2006. B. M. Moon, Y. J. Park, and D. K. Jeong, “Monotonic widerange digitally controlled oscillator compensated for supply voltage variation,” IEEE Trans. Circuits Syst. II, Exp. Briefs, vol. 55, no. 10, pp. 1036–1040, Oct. 2008. K. H. Choi, J. B. Shin, J. Y. Sim, and H. J. Park, “An interpolating digitally controlled oscillator for a wide range all digital PLL,” IEEE Trans. Circuits Syst. I, Reg. Papers, vol. 56, no. 9, pp. 2055–2063, Sep. 2009. T. M. Matano, Y. Takai, T. Takahashi, Y. Sakito, I. Fujii, Y. Takaishi, H. Fujisawa, S.Kubouchi, S. Narui, K.Arai,M.Morino, M.Nakamura, S. Miyatake, T. Sekiguchi, and K. Koyama, “A 1Gb/s/pin 512-Mb DDRII SDRAM using a digital DLL and a slew-rate-controlled output buffer,” IEEE J. Solid-State Circuits, vol. 38, no. 5, pp. 762–768, May 2003. F. Lin, J. Miller, A. Schoenfeld, M. Ma, and R. J. Baker, “A register controlled symmetrical DLL for double-data-rate DRAM,” IEEE J. Solid-State Circuits, vol. 34, no. 4, pp. 565– 568, Apr. 1999. R. J. Yang and S. I. Liu, “A 40–550 MHz harmonic-free all digital delay locked loop using a variable SAR algorithm,” IEEE J. Solid-State Circuits, vol. 42, no. 2, pp. 361–373, Feb. 2007. ISSN: 2231-5381 http://www.ijettjournal.org Page 704