A Fast Kernel Parametric Active Contour Segmentation
advertisement

International Journal of Engineering Trends and Technology (IJETT) – Volume 21 Number 6 – March 2015
A Fast Kernel Parametric Active Contour
Method for Detecting Tumor based on Image
Segmentation
Binil Kumar K ,Anoop B K, Adarsh K S
Assistant Professor, Department of ECE ,
Vimal Jyothi Engineering College,Kannur
Kerala,India
Abstract —Object boundary detection is one of the important
processing technique in pattern recognition area. One of the
popular method for object boundary detection is parametric
active contours. Existing parametric active contour methods
having the disadvantages of slower convergence rates, difficulty
in dealing with complex high curvature boundaries, and also
there is a chance to being trapped in local optima in the presence
of noise and background clutter. To avoid these problems, this
paper presents kernel-based active contour approach and the
developed algorithm is used here for segmenting particular
tumor growth in the brain.
an adaptive non-stationary kernel, derived from the underlying
image characteristics, as the internal energy of the deformable
model. This method allows the faster and more accurate
convergence by adapting to the underlying image
characteristics, particularly under situations characterized by
noise and complex high curvature boundaries.
A. Parametric Active Contour Theory
The basic work on parametric active contour [7]
defined the active contour as an energy minimizing
deformable model v(s)=((x(s)y(s)),s ϵ [0,1] with normalized
arc length .The goal is to create the deformable model to
Keywords— Tumor, Kernel, Parametric active contour, Mean
minimize the energy functional. The internal energy is a
square error,(MSE),Execution time(ET)
weighted sum of elastic and membrane energies. This is the
Introduction
concept of parametric active contour theory. The external
I. INTRODUCTION
The technique object boundary detection in the energy is calculated from the image in a way dependent upon
presence of noise and background clutter has many important the application. Typically, as the object boundaries coincide
applications in biomedical engineering [1], content based with image edges, the external energy is made a function of
image and video retrieval [4], video segmentation [5], and the image gradient (g) such that the contour could converge to
image composition [6]. A well-known approach to object the boundaries. To address the issues of slow convergence rate,
boundary detection is those based on active contours [7] – [14]. inability to converge towards high curvature boundaries, and
Current parametric active contour techniques iteratively sensitive to local minima under noise and clutter, the proposed
generate a deformable model to reduce the sum of internal and technique dynamically derives a non-stationary kernel from
external energies of the model to obtain an optimal curve the underlying image characteristics to account for noise,
representing the object boundary. The internal energy enforces clutter, and complex high curvature boundaries, as well as
a penalty on the slope and curvature of the object boundary, better attract the initial contour that is far from the desired
while the external energy pulls the deformable model to the solution to improve convergence speed.
object boundary. Many types of the traditional active contour II. KERNEL-BASED PARAMETRIC ACTIVE CONTOUR
approach [7] proposed have focused on increasing the capture
The proposed approach can be described as follows.
range [15] – [19] of the traditional active contour approach. Let v ϵ [x,y] be a deformable model. At the equilibrium [7],At
Further, PCA based training [21] has been attempted to the equilibrium [7],When v lies at the boundary of the object,
eliminate initialization and capture range problem.
There are three major problems currently faced by
Bv + f(v)=0
(1)
parametric active contour approaches for object boundary
detection. The first major challenge deals with slow
convergence rate. The second challenge is the presence of where the matrix B defines some internal constraints that
image noise contamination and background clutter, which can defines the properties of the object boundaries, while
lead to poor boundary detection. Existing approaches have f=[fx,fy]defines some external constraints that ties the
difficulty dealing with complex high curvature boundaries. To boundary to the object boundaries. Therefore, in object
address these issues, this paper presents a novel kernel-based boundary detection, the aim is to generate v such that (1) is
parametric active contour method that shares the same theory satisfied. Rather than defining B an internal constraints matrix
of traditional deformable models. However, instead of in a stationary, static manner like previous approaches, which
implementing penalties on slope and curvature as an internal is a chance to being trapped in local optima under noise,
energy, which are highly sensitive to noise and handles high clutter, and complex high curvature boundaries, instead
curvature boundaries poorly, the proposed method introduces
ISSN: 2231-5381
http://www.ijettjournal.org
Page 313
International Journal of Engineering Trends and Technology (IJETT) – Volume 21 Number 6 – March 2015
reformulate the evolution of v to introduce an adaptive nonstationary kernel to enforce different constraints depending
image characteristics.
(2)
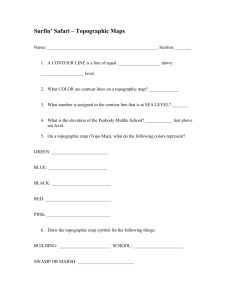
INPUT IMAGE
CREATING DEFORMABLE MODEL
The individual components of vt =[xt,yt] define by:
(3)
(4)
OPTIMIZING MODEL TO RUN
Present active contour evolution uses a stationary
kernel equivalent to
(5)
FITTING MODEL AT THE BORDER
OF THE TUMOR
that is derived from local neighbourhood of each snake
coordinates. However, it is essential, a kernel that account for
both global feature image features and local spatial features.To
account for the above mentioned issues associated with noise,
clutter, complex high curvature boundaries, and convergence
speed, here introduce an adaptive kernel for a particular pixel
that is a product of three different factors based on local image
characteristics of its neighbours: 1) penalty on gradient
deviation (ψ), 2) penalty on spatial deviation (ϕ), and 3)
penalty on intensity deviation (φ):
SEGMENT THE TUMOR
SEGMENTED TUMOR
Fig 1. Flow diagram.
III . METHODOLOGY
(6)
j ={1,2,3…..q}
Kernel based parametric active contour algorithm for
segmenting tumour
STEP1: Input Image
STEP2: Resize Image.
STEP3: Creating Deformable Model
STEP4: Fitting Model At The Border Of The Tumor
STEP5: Segment The Tumor.
STEP6: Segmented Tumor – Output
The steps for performing segmentation of tumor from an
MRI Image is described above. First we are taking the image
of the tumor affected MRI image. Then here resizing the
image to its suitable size. Then we are going for the
deformable model, in which through the expansion or
shrinking the contour(snakes) will be exactly fitting to the
border of the tumor. After several iterations we will get the
required segmented tumor with satisfied MSE(mean square
error) and ET(execution time).
ISSN: 2231-5381
A. Gradient Of The Image
An initial active contour (initial ac) is formed across the
image of interest. This is also called boundary. According to
this ac, the iteration is performing. That means the shrinking
or expansion of image is happening. Active contours, or
snakes, are curves that move within images to find object
boundaries. Image gradients can be used to extract information
from images.
B. Kernel-based parametric active contour (KPAC)
The kernel „ ‟ is calculated using (6),based on
(1),(2),(3),(4).
C. Convergence Of The Image With Gradient Image.
In this step the image obtained after the KPAC iteration
process is converged with gradient image for obtaining the
real segmented image so that obtaining an exactly segmented
image which handles high curvature boundaries effectively.
This allows the faster and more accurate convergence by
adapting to the underlying image characteristics, particularly
under situations characterized by high curvature and noise.
http://www.ijettjournal.org
Page 314
International Journal of Engineering Trends and Technology (IJETT) – Volume 21 Number 6 – March 2015
IV. RESULTS AND DISCUSSIONS
parametric active contour ) has noticeably lower execution
time when compared to GVFS and VFC uses two different
diffusion techniques to spread out the gradient throughout
the image to attract the snake that is initialized for the
desired solution. Furthermore, both the GVFS and VFC
techniques use an iterative gradient descent technique for the
minimization of the snake energy. Therefore, both of these
techniques still having the problems of being trapped in local
minima. GVFS and VFC provide better results for images
where the gradient is strong and well defined along the
object boundary with little noise or clutter. However, the
diffusion operators of GVFS and VFC start performing
poorly in the cases where the gradient is ill-defined along the
object boundary with respect to the rest of the image due to
background clutter, noise and high curvature boundaries. In
these cases, both GVFS and VFC starts becoming trapped in
local minima. Therefore, GVFS and VFC failed to converge
to the true object boundary .The penalty terms of KPAC are
derived from image characteristics, and therefore adaptively
tightens or loosens penalties to account for the high
curvature boundary characteristics, noise ,and background
clutter. where KPAC noticeably handles complex, high
curvature boundaries and background clutter better than
GVFS and VFC, both of which were trapped in local optima
and thus generate poorly localized object boundaries.
TABLE 1 COMPARISON BETWEEN TWO ALGORITHMS
Fig 2 .Input MRI image
METHOD
KPAC
GVF
MSE
1.3961
6.0056
ET(SEC)
4.477098
94.676094
MSE: Mean Square Error
ET: Execution Time
KPAC :Kernel Based Parametric Active Contour
GVF: Gradient Vector Flow
V. CONCLUSIONS.
Here, a novel kernel-based active contour approach to
object boundary detection was introduced. By introducing an
adaptive kernel derived from underlying image characteristics
into the parametric active contour approach, the method
mentioned here is able to better handle complex high
curvature boundaries, noise, background clutter, as well as
improve convergence speed. Future work involves extending
this kernel based parametric contour method for 3-D volume
boundary detection and investigating additional local image
characteristics to achieve better boundary detection
performance.
REFERENCES
Fig 3 Segmented output
The MSE and execution time for the proposed KPAC
method achieves noticeably lower MSE in all of the test cases
and all noise levels when compared to GVFS and VFC, thus
demonstrating the ability of KPAC in handling noise,
background clutter, and complex boundary characteristics in
real images. Figure 2 shows the input MRI image and figure
3 ,the segmented image. Furthermore, KPAC(kernel based
ISSN: 2231-5381
[1] A. Mishra, A. Wong, W. Zhang, D. Clausi, and P. Fieguth, ―Improved
interactive medical image segmentation using enhanced intelligent scissors
(eis),‖ in Annu. Int. Conf. IEEE Engineering in Medicine and Biology Soc.,
Aug. 2008, pp. 3083–6.
[2] C. Davatzikos and J. Prince, ―An active contour model for mapping the
cortex,‖ IEEE Trans. Med. Imag., vol. 14, pp. 65–80, Mar. 1995.
[3] Leymarie and M. D. Levine, ―Tracking deformable objects in the plane
using an active contour model,‖ IEEE Trans. Pattern Anal.Mach.Intell., vol.
15, no. 6, pp. 617–634, 1993.
http://www.ijettjournal.org
Page 315
International Journal of Engineering Trends and Technology (IJETT) – Volume 21 Number 6 – March 2015
[4] N. Alajlan, M. Kamel, and G. Freeman, ―Geometry-based image
retrievalin binary image databases,‖ IEEE Trans. Pattern Anal.Mach.Intell.,
vol. 30, no. 6, pp. 1003–1013, 2008
[5] S. Mahmoodi, ―Shape-based active contours for fast video segmentation,‖
IEEE Siganl Process.Lett., vol. 16, no. 10, pp. 857–860, 2009
[6] N. M. Eric and A. B.William, ―Intelligent scissors for image
composition,‖inSIGGRAPH ’95: Proc. 22nd Annu. Conf. Computer
Graphicsand Interactive Techniques, New York, 1995, pp. 191–198
[7] M. Kass, A. Witkin, and D. Terzopoulos, ―Snakes: Active
contourmodels,‖ Int. J. Comput. Vis., vol. 1, no. 4, pp. 321–331, 1988.
[8] R. Malladi, J. A. Sethian, and B. C.Vemuri, ―Shape modeling with
frontpropagation: A level set approach,‖ IEEE Trans. Pattern Anal.
Mach.Intell., vol. 17, no. 2, pp. 158–175, 1995.
[9] P. Brigger, J. Hoeg, and M. Unser, ―B-spline snakes: A flexible tool
forparametric contour detection,‖ IEEE Trans. Image Process., vol. 9,
pp.1484–1496, 2000.
[10] B. Xin, Z. Chungang, and D. Han, ―A new mura defect inspection wayfor
tft-lcd using level set method,‖ IEEE Signal Process. Lett., vol. 16,no. 4, pp.
311–314, 2009.
[11] D. Schonfeld and N. Bouaynaya, ―A new method for
multidimensionaloptimization and its application in image and video
processing,‖ IEEESignal Process. Lett., vol. 13, no. 8, pp. 485–488, 2006.
[12] A. Amini, T. E. Weymouth, and R. C. Jain, ―Using dynamic
programmingfor solving variational problems in vision,‖ IEEE Trans.
PatternAnal. Mach. Intell., vol. 12, no. 9, pp. 855–867, 1990.
[13] A. Mishra, P. Fieguth, and D. Clausi, ―Accurate boundary
localizationusing dynamic programming on snakes,‖ in Can. Conf. Robotics
andComputer Vision, May 2008, pp. 261–269.
[14] C. Xu and J. Prince, ―Snakes, shapes, and gradient vector flow,‖
[15] IEEETrans. Image Process., vol. 7, pp. 359–369, 1998.
[16] B. Li and T. Acton, ―Active contour external force using vector
fieldconvolution for image segmentation,‖ IEEE Trans. Image Process.,
vol.16, pp. 2096–2106, 2007.
[17] L. Cohen, ―On active contour models and balloons,‖ Comput.Vis.Graph.
[18] Image Understand., vol. 53, no. 2, pp. 211–218, Mar. 1991.
[19] L. Cohen and I. Cohen, ―Finite-element methods for active
contourmodels and balloons for 2-d and 3-d images,‖ IEEE Trans.
PatternAnal. Mach. Intell., vol. 15, no. 11, pp. 1131–1147, 1993.
[20] A. Mishra, P. Fieguth, and D. Clausi, ―Robust snake convergence
basedon dynamic programming,‖ in IEEE Int. Conf. Image Processing,
Oct.2008, pp. 1092–1095.
[21] B. Saha, N. Ray, and H. Zhang, ―Snake validation: A pca-based
outlierdetection method,‖ IEEE Signal Process. Lett., vol. 16, no. 6, pp.549–
552, 2009.
ISSN: 2231-5381
http://www.ijettjournal.org
Page 316