Event-Driven Sampling of Signal with Quadratic Prediction Anna Grybos
advertisement

Event-Driven Sampling of Signal
with Quadratic Prediction
Anna Grybos
Faculty of Applied Mathematics
AGH University of Science and Technology
Al. Mickiewicza 30, 30-059 Krakow, Poland
Email: grybos@agh.edu.pl
Abstract—Proposed article concerns the topics of the eventdriven signal processing, asynchronous analog-to-digital conversion and application of irregular sampling and frame theory
to the algorithms of signal reconstruction. In our work we
follow the discussions on the non-uniform derivative sampling
(SampTA2013) and we focus on analysing an example of the
level-crossing sampling with quadratic (second order) prediction.
I. M OTIVATION
Conventional signal processing is based on uniform sampling requiring a synchronizing clock. It is a major energy consuming element of the architecture. Additionally, the Shannon
sampling criterion imposes the highest expected spectral frequency of sampling. For slowly varying signals large amount
of samples carry no relevant information and unnecessarily
increase the activity of the system. It becomes a main problem
in wireless sensor devices with limited battery life or when
the access to the battery is difficult like in the implantable
biomedical devices.
The event-driven signal processing is self-timed and forced
by temporal changes of the signal, i.e. a sample is produced
only when something significant occurs in the signal [1]. There
are many techniques to achieve event-driven sampling of a
signal [2], [3]. The most natural signal-dependent sampling
scheme is based on the send-on-delta principle [2]–[4]. According to this scheme the sampling is triggered if the signal
deviates by delta from the value of the most recent sample.
This sampling strategy is known as the event-based sampling
[2], [3], [5], [6] the level-crossing sampling [7]–[9] or as the
magnitude-driven sampling [3].
An enchanced version of level-crossing scheme, i.e. with
prediction, was introduced in [10]. The prediction is based on
the assumption that the sampled signal varies according to the
first-order (linear) or second-order (quadratic) approximation
by the truncated Taylor series expanded at the instant of the
most recent sample.
The sampling of the signal and its derivatives was already
described by Papoulis [11] as a special case of a more general
theorem. In [12] different sampling rates are considered for the
signal and for its first derivative in the reconstruction formula.
Both papers are based on the uniform sampling.
Event-driven approach allows for high energy efficiency but
results in irregular sampling of the signal. Irregular systems
are receiving more and more attention as an application as
well as theoretical tool and they enjoy widespread use in
areas as diverse as signal processing, image compression,
wireless communication, finite element methods and many
others. Starting from early statements [13], important results
have been accumulated over the years both in theory [14] and
efficient numerical solutions [15], [16].
However, with the wide use comes the problem of accurate
reconstruction. As demonstrated in [17] the reconstruction formulas are possible to find but they require advanced methods
of frame theory [18], [19] and irregular sampling theory [15],
[20].
The irregular sampling of the signal and its k derivatives
is considered in [21]–[23]. The method is based on frame
algorithm which is an application of Neumann series to
the inversion of frame operator. However, for very irregular
sampling sets the convergence of the frame algorithm can be
very slow.
The recovery problem of bandlimited signals from irregular
samples of the signal and its first derivative was addressed
by the authors at SampTA2013, [24]. Here we summarize the
keypoints of those results for further use.
Based on the classical result of Papoulis [11] on Generalized
Sampling Expansion, authors formulated a set of reconstructing functions as the extension of Papoulis’ theorems. The
main motivation was a reduction of mean sampling frequency
below Nyquist rate. As announced in [11] it corresponds to
the sampling at 1/m of Nyquist rate, where m is the amount
of derivatives.
The authors of [24] presented an example illustrating the
reconstruction of a random signal from samples of the signal
and its first derivative (m = 2). Following the suggestion [25]
that the quadratic prediction, i.e. with the use of the samples
of first and second derivatives (i.e. for m = 3) is technically
accessible we analyse in the present paper the reconstruction
formulas of the signal sampled with quadratic prediction.
II. P RELIMINARIES AND R ECONSTRUCTION SCHEME
For Ω > 0, let B Ω = {f ∈ L2 (R) : suppfˆ ⊂ [−Ω, Ω]}
denote the closed subspace of finite energy bandlimited functions with bandwidth 2Ω. Let f (j) , j = 0, 1, . . . , k denote the
function (signal) f = f 0 and its k derivatives. The derivative
of the bandlimited function is bandlimited as well, according
to Bernstein’s Inequality [14].
The Shannon uniform sampling theory uses the basis of
functions gn = sinc(Ω(t − nT )) and samples x(nT ) as
coefficients in the expansion
x(t) =
X
x(nT )gn (t − nT )
(1)
n∈N
Even with the presence of jitter (perturbation), the reconstruction of the signal from its samples is still achievable due
to the properties of the functions used for the expansion (1)
and due to the resistance of the Fourier transforms to the jitter
error, known as Kadec’s 14 -Theorem [14].
The condition of Kadec’s 14 -Theorem imposes the restrictions on the sampling points tn , namely |tn − n| ≤ L < 41 , for
n ∈ Z. In the event-driven signal processing any distribution
of sampling instants is probable. Duffin and Schaeffer in their
very influential article [13] prooved that the case of irregular
sampling requires oversampling and therefore frames. Frame
is a generalization of a basis in a Hilbert space H, namely it
is a redundant system of vectors/elements that spans the space
H, [18].
As mentioned in [26] the extension of Shannon Theorem
to irregular sampling, i.e. for frames might be executed by
calculating the coefficients (cn )n∈N in the expansion (2)
X
x(t) =
cn gn (t)
(2)
n∈N
The reconstruction formula analysed in [24] is
x(t) =
+∞ m−1
X
X
ck,n gk (t − tn )
(3)
n=−∞ k=0
with reconstruction functions
Ω
dr tk
r
m
gk (t) = r
sinc
t
dt
k!
m
(4)
g01 (t) =
d
(sinc3 (Ω · t/3))
dt
g11 (t) = g00 (t) + t · g01 (t)
g21 (t) = g10 (t) + g01 (t) · t2 /2
g02 (t) =
d 1
(g (t))
dt 0
g12 (t) = 2 · g01 (t) + t · g02 (t)
g22 (t) = 2 · g11 (t) − g00 (t) + g02 (t) · t2 /2
The obtained formulas for the reconstruction functions {gkr }
are included in the Appendix. Additionally, the reconstruction
functions are presented in the Fig.2, Fig.3 and Fig.4.
In order to calculate the sequences of coefficients ck =
(ck,n )n∈N where k = 0, 1, 2, in the formula (3) we rewrite it
in the matrix form:
(0) (0)
(0)
(0)
G0
G1
G2
x
c0
(1)
(1)
(1)
x(1) =
G0
G1
G2 · c1
(2)
(2)
(2)
c2
x(2)
G
G
G
0
1
2
where x(0) , x(1) , x(2) denote the signal x and its first and sec(r)
(r)
ond derivatives, while [Gk ] is given by [Gk ]i,j = gkr (ti −tj )
with k, r = 0, 1, 2 and ti , tj being the sampling instants (for
the details we refer to [24]).
IV. S IMULATIONS
We analyse the example signal x(t) from [24] to test and
compare the effectiveness of the sampling with quadratic
prediction to the sampling with linear prediction presented in
[24]. The signal x(t) of the length L = 40 is bandlimited
to |Ω| < π. The sampling procedure with quadratic prediction
gives 25 samples of the signal, 25 samples of its first derivative
and analogously 25 samples for the second derivative, which
results in the redundancy of 75/40 = 1.875.
where k, r = 0, 1, . . . , m − 1.
Even if there is a set of reconstruction functions in the
expansion (3), it is the approach describing one channel
case [11]. As in (2) the proposed procedure is based on
computation of the coefficients ck = (ck,n ) where n ∈ N and
k ∈ {0, 1, . . . , m−1}. The amount of reconstructing functions
depends on the number of derivates m − 1.
III. M AIN RESULT
Aiming for the quadratic prediction we find the reconstruction functions necessary for the formula (3) given by the
condition (4) with m = 3. Tedious transformations provide
the set of nine reconstruction functions {gkr }, k, r = 0, 1, 2 of
the following form:
g00 (t) = sinc3 (Ω ∗ t/3)
g10 (t) = t · g00 (t),
g20 (t) = g00 (t) · t2 /2
(5)
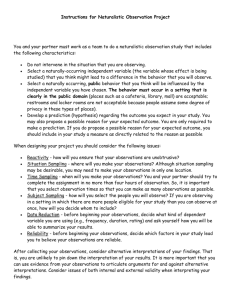
Fig. 1. Bandlimited signal x(t) and its reconstruction from the nonuniform
samples with quadratic prediction.
The original signal x(t) and its reconstruction are presented
in the Fig.1. The reconstruction error is slightly higher than
the one obtained in [24]. The condition number of the matrix
related to the reconstruction functions {gkr } with k, r = 0, 1, 2
is similar that the corresponding one from the simulation
analysed in [24].
It allows us to state that the complication of calculations
involving the second derivate results in higher accumulation
of numerical errors while no significant improvement of signal
reconstruction from the use of the quadratic prediction instead
of linear prediction is obtained.
V. C ONCLUSIONS
The article concerns the event-driven signal sampling processing, i.e. a procedure where the sampling is induced by
the behaviour of the signal and not by an external clock. We
focus on the level-crossing scheme with first and second order
prediction.
The case of the level-crossing sampling with linear (first order) prediction was analysed in [24]. Following the discussions
on this work ( [24], [25]) as well as the Generalized Sampling
Theorem of Papoulis [11] we analyse the example of the levelcrossing sampling with quadratic (second order) prediction.
The procedure results in higher complication of calculations
while gives no visible improvement of signal reconstruction.
ACKNOWLEDGMENT
The research of Anna Grybos has been supported by the
Polish - Norwegian Research Programme within Small Grant
Scheme 2012 Call (Grant ID 211067).
A PPENDIX
Fig. 2. Reconstruction functions g00 (t), g10 (t) and g20 (t), used in the formulas
(5).
The formulas for the reconstruction functions {gkr } with
k, r = 0, 1, 2 are presented in Fig.5.
R EFERENCES
Fig. 3. Reconstruction functions g01 (t), g11 (t) and g21 (t), used in the formulas
(5).
Fig. 4. Reconstruction functions g02 (t), g12 (t) and g22 (t), used in the formulas
(5).
[1] Y. Tsividis. Event-driven data acquisition and digital signal processing:
a tutorial IEEE Trans. Circuits and Systems, vol57. no.8, pp.577–582,
2010.
[2] Arzén, K.E. A simple event-based PID controller. Proceedings of IFAC
World Congress 1999, 18, 423-8.
[3] Miśkowicz, M. Analytical approximation of the uniform magnitudedriven sampling effectiveness. Proceedings of IEEE Intern. Symp. on
Industrial Electronics ISIE’2004, Ajaccio, France, 2004, 407-10.
[4] E. R. Negrin. Operators with complex Gaussian kernels: Boundedness
properties. Proc. Am. Math. Soc., 123(4):1185–1190, 1995.
[5] S. K. Berberian. Fundamentals of Real Analysis. Universitext. Springer,
New York, NY, 1998.
[6] Sayiner, N.; Sorensen, H.V.; Viswanathan, T.R. A level-crossing sampling
scheme for A/D conversion.
[7] Miśkowicz, M.; Golański, R. LON Technology in Wireless Sensor Networking Applications. Sensors, Special Issue: Wireless Sensor Networks
and Platforms, 2006,
[8] Aström, K.J.; Wittenmark, B. Computer-Controlled Systems: Theory and
Design. 3rd edition, Printice Hall: New Jersey, 1997.
[9] A. Mielke. Macroscopic Behavior of Microscopic Oscillations in Harmonic Lattices via Wigner-Husimi Transforms. Arch. Rational Mech.
Anal., 181(3):401–448, 2006.
[10] Y.S. Suh, Send-on-delta sensor data transmission with a linear predictor,
Sensors, vol. 7, pp. 537-547, 2007.
[11] A. Papoulis. Generalized sampling expansion. IEEE Trans. Circuits and
Systems, 24(11):652 – 654, 1977.
[12] Y. C. Eldar and A. V. Oppenheim. Filterbank reconstruction of
bandlimited signals from nonuniform and generalized samples. IEEE
Trans. Signal Process., 48(10):2864–2875, October 2000.
[13] R. J. Duffin and A. C. Schaeffer. A class of nonharmonic Fourier series.
Trans. Am. Math. Soc., 72:341–366, 1952.
[14] R. M. Young. An Introduction to Nonharmonic Fourier Series. Academic Press, Orlando, FL, Revised 1st edition edition, 2001.
[15] H. G. Feichtinger and K. Gröchenig. Theory and practice of irregular
sampling. In J. Benedetto and M. Frazier, editors, Wavelets: Mathematics
and Applications, Studies in Advanced Mathematics, pages 305–363,
Boca Raton, FL, 1994. CRC Press.
[16] H. G. Feichtinger, K. Gröchenig, and T. Strohmer. Efficient numerical
methods in non-uniform sampling theory. Numer. Math., 69(4):423–440,
1995.
27
[3 sin(Ωt/3) − sin(Ωt)]
4Ω3 t3
27
[3 sin(Ωt/3) − sin(Ωt)]
g10 (t) =
4Ω3 t2
27
g20 (t) =
[3 sin(Ωt/3) − sin(Ωt)]
8Ω3 t
g00 (t) =
81
[sin(Ωt) − 3 sin(Ωt/3) + Ωt/3[cos(Ωt/3) − cos(Ωt)]]
4Ω3 t4
27
g11 (t) =
[2 sin(Ωt) − 6 sin(Ωt/3) + Ωt[cos(Ωt/3) − cos(Ωt)]]
4Ω3 t5
27
[sin(Ωt) − 3 sin(Ωt/3) + Ωt[cos(Ωt/3) − cos(Ωt)]]
g21 (t) =
8Ω3 t2
g01 (t) =
g02 (t) =
g12 (t) =
9 (243 − Ω3 t2 ) sin(Ωt/3) + (3Ω3 t2 − 81) sin(Ωt) + 3Ωt(2Ω + 9)[cos(Ωt) − cos(Ωt/3)]
4
5
4Ω t
(6)
(7)
(8)
(9)
(10)
(11)
(12)
9 (243 − 18Ω − Ω3 t2 ) sin(Ωt/3) + (3Ω3 t2 + 6Ω − 81) sin(Ωt) + Ωt(4Ω + 27)[cos(Ωt) − cos(Ωt/3)] (13)
2
4
4Ω t
27
g22 (t) =
[(t2 (81 − 6Ω) − 24Ω − Ω3 t4 /3) sin(Ωt/3) + (Ω3 t4 + t2 (2Ω − 27) + 8) sin(Ωt)+
(14)
8Ω4 t5
+Ωt(t2 (2Ω + 9) − 4Ω)[cos(Ωt) − cos(Ωt/3)]]
Fig. 5. Reconstruction functions {gkr } with k, r = 0, 1, 2 used in the formulas (5).
[17] A. A. Lazar, E. Simonyi, K., and L. T. Tóth. A Toeplitz formulation
of a real-time algorithm for time decoding machines. In Proceedings of
the Conference on Telecommunication Systems, Modeling and Analysis,
November 2005.
[18] K. Gröchenig. Foundations of Time-Frequency Analysis. Appl. Numer.
Harmon. Anal. Birkhäuser Boston, Boston, MA, 2001.
[19] J. Kovacevic, P. L. Dragotti, and V. K. Goyal. Filter bank frame
expansions with erasures. IEEE Trans. Inform. Theory, 48(6):1439–1450,
2002.
[20] T. Strohmer. Efficient Methods for Digital Signal and Image Reconstruction from Nonuniform Samples. PhD thesis, Dept. Mathematics, Univ.
Vienna, 1994.
[21] M. Rawn. A stable nonuniform sampling expansion involving derivatives. IEEE Trans. Inform. Theory, 35(6):1223–1227, November 1989.
[22] K. Gröchenig. Reconstruction algorithms in irregular sampling. Math.
Comp., 59:181–194, 1992.
[23] H. N. Razafinjatovo. Iterative reconstruction in irregular sampling with
derivatives. J. Fourier Anal. Appl., 1:281–295, 1995.
[24] D.Rzepka, M. Miśkowicz, A. Gryboś, D. Kościelnik Recovery of Bandlimited Signal Based on Nonuniform Derivate Sampling. Proceedings
of SampTa 2013: 10th international conference on Sampling Theory and
Applications, July 2013, Bremen / Jacobs University
[25] D. Kościelnik, M. Miśkowicz direct consultations
[26] H. G. Feichtinger. Reconstruction of band-limited signals from irregular
samples, a short summary. In 2. International Workshop on Digital
Image Processing and Computer Graphics with Applications, pages 52–
60, Austrian Academy of Sciences, 1991.