Video Stabilization and Enhancement
advertisement

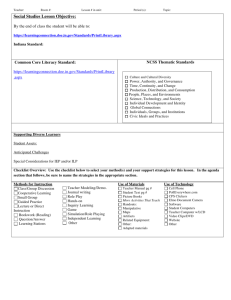
International Journal of Engineering Trends and Technology (IJETT) – Volume 5 Number 6 - Nov 2013 Video Stabilization and Enhancement * V.S.R Kumari 1 Anusha Korrapati 2 Professor & HOD, Dept. of ECE, Sri Mittapalli College of Engineering, Guntur, A.P, India. PG Student (M. Tech), Dept. of ECE, Sri Mittapalli College of Engineering, Guntur, A.P, India. 1 2 Abstract: The poor image quality of many video surveillance cameras effectively renders them useless for the purposes of identifying a person, a license plate, etc. Hence, many researchers study such drawbacks to enhance the quality of casual videos. In this paper propose a matching algorithm to stabilize causal videos directly without the need to estimate the motion. A stable output video will be attained without any unanticipated effects during video recording. Keywords: Image processing, video stabilization The first phase the purpose is to 1. Introduction Recently, the market of handheld estimate the motion between frames. After camera has growth rapidly. However, that, the parameters of estimated motion video capturing by non-professional user which is obtained from the first phase will normally unanticipated be sent to motion compensation, where effects. Let us assume a camera rigidly removing the high frequency distortion mounted on a vehicle in motion. If the and calculating the global transformation, motion of the vehicle is smooth, so will be which is very important to stabilize the the corresponding image sequence taken current frame. Next, warping will be done from the camera. by image composition for the frame under will lead to In the case of small unmanned aerial processing. 2. Architecture of the system imaging system, and off road navigating ground vehicles, the onboard cameras experience sever jitter and vibration. Figure diagram 1 shows of video the basic block stabilization and Consequently, the video images acquired enhancement. It mainly consists feature from selection; these preprocessed platforms to have eliminate induced variations analysis. Generally before the the to be jitter human processes of stabilization have to go through three phases namely 1. Motion estimation select the correspondence between points, estimated transform, and smoothening. A) Feature selection (Detection of corners) This stabilization algorithm requires features to estimate motion between 2. Motion smoothing frames. Since features are required to 3. Image composition. persist from frame to frame, it is a good idea to have a feature selection method that will choose parts of the image that ISSN: 2231-5381 http://www.ijettjournal.org Page 298 International Journal of Engineering Trends and Technology (IJETT) – Volume 5 Number 6 - Nov 2013 will likely not change in appearance from corner detectors have been developed in frame to frame. An ideal feature is distinct that and unique, is identifiable in the next Detector System Object is used to find frame, and provides new information to corner the stabilization process. Detection which is one of the fastest Many applications require relating Corner detector values using system. Corner Harris Corner algorithms to find corner values. two or more images in order to extract B) Select information from them. For example, if points correspondence between two successive frames in a video sequence After the salient points from each taken from a moving camera can be frame are obtained the correspondence related, extract between the points. For each point, the information regarding the depth of objects matching of lowest cost between the in the environment and the speed of the points that existed in frame A and B are camera. of also needed to be found for all points. comparing every pixel in the two images is Hence, it is necessary to divide the computationally sequence of frames image into 9×9 block. it is The possible brute force to method prohibitive for the majority of applications. The matching cost means the distance Intuitively, one can image relating two images by matching only locations in the image that To find this cost, the technique of interesting. Such points are referred to as Sum of Squared Differences (SSD) can be interest points and are located using an used interest images. relationship in detector. between some pixel. way point are between frame A and B measured in Finding point consecutive in frame frame A is compared with the points in frame B to performed using only these points. This find the lowest matching cost or in other drastically words the shortest distance between them the is Each the then reduces images a between required computation time. Many different measured in pixels. interest point detectors have been proposed with a wide range of definitions for what points in an image are interesting. Some detectors find points of high local symmetry; others find areas of highly varying texture, while others locate corner points. Corner points are interesting as they are formed from two or more edges and edges usually define the boundary between two different objects or parts of the same object. Many ISSN: 2231-5381 Figure 1 Block diagram of video stabilization and enhancement http://www.ijettjournal.org Page 299 International Journal of Engineering Trends and Technology (IJETT) – Volume 5 Number 6 - Nov 2013 C) After that, we determine the affine image transformations between C. Select correspondence between points all After the salient points from each neighboring frames of a video sequence frame using and between the points. For each point, the Consensus (RANSAC) procedure applied matching of lowest cost between the points to point correspondences between two that existed in frame A and B are also needed images and finally we warp the video to be found for all points. Hence, it is frames to achieve a stabilized video. necessary to divide the sequence of frames 3. RESULTS AND DISCUSSION image into 9×9 block. The matching cost a Random Sampling In this section, we discuss the results attained based proposed methodology. are obtained the correspondence means the distance between frame A and B measured in pixel. A. Read the frame from captured video To find this cost, the technique of In this paper, we read first two frames Sum of Squared Differences (SSD) can be from captured video for stabilization used between the consecutive frame images. images Each point in frame A is compared with the because of grayscale images improve the points in frame B to find the lowest matching speed. Below figure2 shows captured cost or in other words the shortest distance frames from a video. between them measured in pixels. Figure 4 process. We read intensity Frame A represents the corresponding points between Frame B frames. A B Figure 2 Captured frames from a video B. Detection of corners Initially, an algorithm is developed based on FAST corner detection algorithm to identify all strong corner points from each frame. Sample of detected corner Figure 4 corresponding points between frames D. Estimate from correspondences points obtained from each frames as shown in below figure2. transformation Many of the point correspondences obtained in above step are incorrect. But we can still derive a robust estimate of the geometric transform between the two images using the Random Sample Consensus (RANSAC) algorithm. This algorithm searched through Figure 3 Detected corner points obtained from each frame ISSN: 2231-5381 the correspondences given set specifically of valid point linear correspondence as in Figure 5. http://www.ijettjournal.org Page 300 International Journal of Engineering Trends and Technology (IJETT) – Volume 5 Number 6 - Nov 2013 A B Figure 7 Stabilized output Figure 5 Correct correspondences according to RANSAC 4. Quality Measurements E. Transform and smoothening The The main goal of this step is to correct the distortion between the two frames by finding a transformation that will be done by applying an object system which returns affine transform. Figure 6 shows color composite of affine transform and its S-R-T output video quality is also measured based on the proposed methods. This is evaluated based on Singular Value Decomposition (SVD) based grayscale Image value and graphical measurement. 1. SVD Based Grayscale Image Quality Singular value decomposition (SVD) is transform. Color composite of affine and s-R-t transform outputs developed as a new measurement that can express the quality of distorted images either graphically that is in 2D measurement or 50 numerically as a scalar measurement, both near and above the visual threshold. The 100 experiments 150 here utilized SVD based measurement that outperformed the normally used PSNR and corresponding results as 200 shown in table 1. The following Equation 50 100 150 200 250 300 Figure 6 color composite of affine transform and S-R-T transform. represented the computed value for this purpose: F. Stabilized output Further, the raw mean video frames and the mean of corrected frame are computed as in Figure 6. The left image showed the mean of the raw input frames that resembled the distorted original video frame due to extreme jittery. On the right side is the mean of the corrected frames with less distortion. This proven that the stabilization Where: Dmid represents the midpoint of the sorted DiS k is the image size n is the block size M –SVD is the measurement of Singular value decomposition. algorithm worked well. ISSN: 2231-5381 http://www.ijettjournal.org Page 301 International Journal of Engineering Trends and Technology (IJETT) – Volume 5 Number 6 - Nov 2013 2. C. Harris and M.J. Stephens, “A combined Table 1 Criteria of sample video & Results (Type: RGB & Extension: AVI) Sample Frame Frames Raw input mean corner and edge detector”, Proc of Alvey Vision Conference, pp 147–152, 1988. Computational Numerical Quality Time (S) Measure Value 8.078 52.98% 47.02% 70 3. Anu Suneja and Gaurav Kumar . “An Experimental Study of Edge Detection Methods in Digital Image”, Global Journal of Computer Science and Technology, 10(2), 2010. 4. http://www.mathworks.com/products/com putervision/demos.html?file=/products/de 4. Conclusion We have described a mos/shipping/vision/videostabilize_pm.ht simple and computationally efficient technique for ml. 5. Fischler, MA; Bolles, RC. "Random Sample video stabilization and enhancement. The Consensus: A Paradigm for Model Fitting motion between video frames is modeled as a global affine transform with Applications to Image Analysis and whose Automated Cartography." Comm. of the parameters are estimated using standard matching techniques. A temporal mean or ACM 24, 1981. 6. Tordoff, B; Murray, DW. "Guided sampling median filter is then applied to this and consensus for motion estimation." 7th stabilized video to yield a single high quality frame. We have shown European Conference on Computer Vision, the effectiveness of this technique on both 2002. 7. J. Jin, Z. Zhu, and G. Xu. “Digital video synthetically generated and real video. sequence This technique should prove useful in motion enhancing the quality of low-grade video stabilization estimation and based on inertial 2.5D motion filtering”, Real-Time Imaging, 7(4):357–365, surveillance cameras. 2001. 8. http://siddhantahuja.wordpress.com/tag/ Acknowledgements sum-of-squared-differences/ The authors would like to thank the anonymous reviewers for their comments which were very helpful in improving the quality and presentation of this paper. References: 1. M. Gleicher 9. M. Pilu. “Video stabilization as a variation problem and numerical solution with the Viterbi method”. In Proceedings of Computer Vision and Pattern Recognition, pp 625–630, 2004. and F. Liu., “Re 10. Aleksandra Shnayderman, Alexander cinematography: Improving the camerawork Gusev, and Ahmet M. Eskicioglu “An SVD- of casual video,” ACM Transactions on Based Grayscale Image Quality Measure for Multimedia Computing, Communications, Local and Global Assessment “,IEEE 15(2), and Applications, 5(1), pp 1- 28, 2008. 2006. ISSN: 2231-5381 http://www.ijettjournal.org Page 302 International Journal of Engineering Trends and Technology (IJETT) – Volume 5 Number 6 - Nov 2013 Authors Profile: V.S.R KUMARI is working as a Professor & department Head of the of Electronics & Communication Engineering in College of Sri Mittapalli Engineering, Guntur, A.P, India. She has over 18 years of teaching experience and she is carrying out her research under Andhra University, Vishakhapatnam, AP, India. Anusha Korrapati is Pursuing her M. Tech from Sri Mittapalli College of Engineering, Guntur, A.P, India in the department of Electronics & Communications Engineering (ECE). ISSN: 2231-5381 http://www.ijettjournal.org Page 303