Noise-Contrastive Estimation and its Generalizations Michael Gutmann
advertisement

Noise-Contrastive Estimation and its
Generalizations
Michael Gutmann
https://sites.google.com/site/michaelgutmann
University of Helsinki
Aalto University
Helsinki Institute for Information Technology
21st April 2016
Michael Gutmann
NCE and its Generalizations
1 / 27
Problem statement
I
Task: Estimate the parameters θ of a parametric model p(.|θ)
of a d dimensional random vector x
I
Given: Data X = (x1 , . . . , xn ) (iid)
I
Given: Unnormalized model φ(.|θ)
Z
φ(x; θ)
φ(ξ; θ) dξ = Z (θ) 6= 1
p(x; θ) =
Z (θ)
ξ
(1)
Normalizing partition function Z (θ) not known / computable.
Michael Gutmann
NCE and its Generalizations
2 / 27
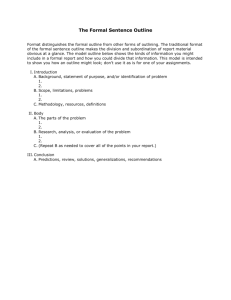
Why does the partition function matter?
φ(x;θ)
Z (θ)
=
2
exp −θ x2
√
I
Consider p(x; θ) =
I
Log-likelihood function for precision θ ≥ 0
r
n
X
xi2
2π
−θ
`(θ) = −n log
θ
2
2π/θ
(2)
i=1
0
Log−likelihood
Data−independent term
Data−dependent term
−100
I
I
Data-dependent (blue) and
independent part (red)
balance each other.
If Z (θ) is intractable, `(θ)
is intractable.
−200
−300
−400
−500
−600
Michael Gutmann
0.5
1
Precision
NCE and its Generalizations
1.5
2
3 / 27
Why is the partition function hard to compute?
Z (θ) =
R
ξ
φ(ξ; θ) dξ
I
Integrals can generally not be solved in closed form.
I
In low dimensions, Z (θ) can be approximated to high
accuracy.
I
Curse of dimensionality: Solutions feasible in low dimensions
become quickly computationally prohibitive as the dimension
d increases.
Michael Gutmann
NCE and its Generalizations
4 / 27
Why are unnormalized models important?
I
I
Unnormalized models are widely used.
Examples:
I
I
I
I
models of images
models of text
models in physics
...
(Markov random fields)
(neural probabilistic language models)
(Ising model)
I
Advantage: Specifying unnormalized models is often easier
than specifying normalized models.
I
Disadvantage: Likelihood function is generally intractable.
Michael Gutmann
NCE and its Generalizations
5 / 27
Program
Noise-contrastive estimation
Properties
Application
Bregman divergence to estimate unnormalized models
Framework
Noise-contrastive estimation as member of the framework
Michael Gutmann
NCE and its Generalizations
6 / 27
Program
Noise-contrastive estimation
Properties
Application
Bregman divergence to estimate unnormalized models
Framework
Noise-contrastive estimation as member of the framework
Michael Gutmann
NCE and its Generalizations
7 / 27
Intuition behind noise-contrastive estimation
I
Formulate the estimation problem as a classification problem:
observed data vs. auxiliary “noise” (with known properties)
I
Successful classification ≡ learn the differences between the
data and the noise
I
differences + known noise properties ⇒ properties of the data
I
Unsupervised learning by
supervised learning
I
We used (nonlinear) logistic
regression for classification
Data or noise ?
Data
Michael Gutmann
NCE and its Generalizations
Noise
8 / 27
Logistic regression (1/2)
I
Let Y = (y1 , . . . ym ) be a sample from a random variable y
with known (auxiliary) distribution py .
I
Introduce labels and form regression function:
P(C = 1|u; θ) =
1
1 + G (u; θ)
G (u; θ) ≥ 0
(3)
Class 1 or 0?
I
Determine the parameters θ
such that P(C = 1|u; θ) is
I
I
large for most xi
small for most yi .
Data: class 1
Michael Gutmann
NCE and its Generalizations
Noise: class 0
9 / 27
Logistic regression (2/2)
I
Maximize (rescaled) conditional log-likelihood using the
labeled data {(x1 , 1), . . . , (xn , 1), (y1 , 0), . . . , (ym , 0)},
1
JnNCE (θ) =
n
I
n
X
log P(C = 1|xi ; θ) +
m
X
i=1
!
log [P(C = 0|yi ; θ)]
i=1
For large sample sizes n and m, θ̂ satisfying
G (u; θ̂) =
m py (u)
n px (u)
(4)
is maximizing JnNCE (θ). Without any normalization
constraints. (proof in appendix)
Michael Gutmann
NCE and its Generalizations
10 / 27
Noise-contrastive estimation
(Gutmann and Hyvärinen, 2010; 2012)
I
Assume unnormalized model φ(.|θ) is parametrized such that
its scale can vary freely.
θ → (θ; c)
I
φ(u; θ) → exp(c)φ(u; θ)
(5)
Noise-contrastive estimation:
1. Choose py
2. Generate auxiliary data Y
3. Estimate θ via logistic regression with
G (u; θ) =
Michael Gutmann
m py (u)
.
n φ(u; θ)
NCE and its Generalizations
(6)
11 / 27
Noise-contrastive estimation
(Gutmann and Hyvärinen, 2010; 2012)
I
Assume unnormalized model φ(.|θ) is parametrized such that
its scale can vary freely.
θ → (θ; c)
I
φ(u; θ) → exp(c)φ(u; θ)
(5)
Noise-contrastive estimation:
1. Choose py
2. Generate auxiliary data Y
3. Estimate θ via logistic regression with
G (u; θ) =
I
G (u; θ) →
m py (u)
n px (u)
⇒
m py (u)
.
n φ(u; θ)
(6)
φ(u; θ) → px (u)
Michael Gutmann
NCE and its Generalizations
11 / 27
Example
I
Unnormalized Gaussian:
u2
φ(u; θ) = exp (θ2 ) exp −θ1
2
I
,
θ1 > 0, θ2 ∈ R,
(7)
Parameters: θ1 (precision), θ2 ≡ c (scaling parameter)
0.5
0
I
Gaussian noise with
ν = m/n = 10
I
True precision θ1? = 1
I
Black: normalized models
Green: optimization paths
Normalizing parameter
Contour plot of JnNCE (θ) :
−0.5
−1
−1.5
−2
−2.5
Michael Gutmann
0.5
1
Precision
NCE and its Generalizations
1.5
2
12 / 27
Statistical properties
(Gutmann and Hyvärinen, 2012)
?
I
Assume px = p(.|θ )
I
Consistency: As n increases,
θ̂ n = argmaxθ JnNCE (θ),
(8)
converges in probability to θ ? .
I
Efficiency: As ν = m/n increases, for any valid choice of py ,
noise-contrastive estimation tends to “perform as well” as
MLE (it is asymptotically Fisher efficient).
Michael Gutmann
NCE and its Generalizations
13 / 27
Validating the statistical properties with toy data
I
Let the data follow the ICA model x = As with 4 sources.
4
X
√
log p(x; θ ? ) = −
2|b?i x| + c ?
(9)
i=1
with c ? = log |detB? | − 24 log 2 and B? = A−1 .
I
To validate the method, estimate the unnormalized model
log φ(x; θ) = −
4
X
√
2|bi x| + c
(10)
i=1
with parameters θ = (b1 , . . . , b4 , c).
I
Contrastive noise py : Gaussian with the same covariance as
the data.
Michael Gutmann
NCE and its Generalizations
14 / 27
Validating the statistical properties with toy data
I
Results for 500 estimation problems with random A, for
ν ∈ {0.01, 0.1, 1, 10, 100}.
I
MLE results: with properly normalized model
2
2
NCE0.01
NCE0.1
NCE1
NCE10
NCE100
NCE0.01
NCE0.1
1
1
NCE1
0
log10 squared error
log10 squared error
NCE10
NCE100
0
MLE
−1
−2
−1
−2
−3
−4
−3
−5
−4
2.5
3
3.5
log10 sample size
4
4.5
(a) Mixing matrix
Michael Gutmann
−6
2.5
3
3.5
log10 sample size
4
4.5
(b) Normalizing constant
NCE and its Generalizations
15 / 27
Computational aspects
I
I
The estimation accuracy improves as m increases.
Trade-off between computational and statistical performance.
Example: ICA model as before but with 10 sources. n = 8000,
ν ∈ {1, 2, 5, 10, 20, 50, 100, 200, 400, 1000}.
0
Performance
for 100 random estimation problems:
−0.5
−1
log10 sqError
I
NCE
−1.5
MLE
−2
−2.5
−3
1
1.5
2
2.5
3
3.5
Time till convergence [log10 s]
Michael Gutmann
4
NCE and its Generalizations
16 / 27
Computational aspects
How good is the trade-off? Compare with
1. MLE where partition function is evaluated with importance
sampling. Maximization of
!
n
m
1 X φ(yi ; θ)
1X
log φ(xi ; θ) − log
(11)
JIS (θ) =
n
m
py (yi )
i=1
i=1
2. Score matching: minimization of
n
10
1 XX 1 2
JSM (θ) =
Ψ (xi ; θ) + Ψ0j (xi ; θ)
n
2 j
(12)
i=1 j=1
with Ψj (x; θ) =
∂ log φ(x;θ)
∂xj
(here: smoothing needed!)
(see Gutmann and Hyvärinen, 2012, for more comparisons)
Michael Gutmann
NCE and its Generalizations
17 / 27
Computational aspects
I
NCE is less sensitive to the mismatch of data and noise
distribution than importance sampling.
Score matching does not perform well if the data distribution
is not sufficiently smooth.
0
NCE
IS
−0.5
SM
MLE
−1
log10 sqError
I
−1.5
−2
−2.5
−3
0.5
1
1.5
2
2.5
3
3.5
Time till convergence [log10 s]
Michael Gutmann
4
NCE and its Generalizations
4.5
18 / 27
Application to natural image statistics
I
I
Natural images ≡ images which we see in our environment
Understanding their properties is important
I
I
for modern image processing
for understanding biological visual systems
Michael Gutmann
NCE and its Generalizations
19 / 27
Human visual object recognition
I
Rapid object recognition by
feed-forward processing
I
Computations in middle
layers poorly understood
I
I
Faces,
objects, ...
?
(up to normalization)
?
?
Our approach: learn the
computations from data
Idea: the units indicate how
probable an input image is.
High-level
vision
?
?
?
?
?
?
?
?
Simple
features
(edges, ...)
?
?
?
?
?
?
Low-level
vision
(Adapted from Koh and Poggio,
Neural Computation, 2008)
(Gutmann and Hyvärinen, 2013)
Michael Gutmann
NCE and its Generalizations
20 / 27
Unnormalized model of natural images
I
I
I
Three processing layers (> 2 · 105 parameters)
Fit to natural image data (d = 1024, n = 70 · 106 )
Learned computations: detection of curvatures, longer
contours, and texture.
Curvature
Contours
Texture
Response
to local
gratings
Strongly
activating
inputs
(Gutmann and Hyvärinen, 2013)
Michael Gutmann
NCE and its Generalizations
21 / 27
Program
Noise-contrastive estimation
Properties
Application
Bregman divergence to estimate unnormalized models
Framework
Noise-contrastive estimation as member of the framework
Michael Gutmann
NCE and its Generalizations
22 / 27
Bregman divergence between two vectors a and b
2
1.5
1
0.5
0
−0.5
−2
−1.5
−1
−0.5
0
0.5
dΨ (a, b) = 0 ⇔ a = b
Michael Gutmann
1
1.5
2
dΨ (a, b) > 0 if a 6= b
NCE and its Generalizations
23 / 27
Bregman divergence between two functions f and g
I
Compute dΨ (f (u), g (u)) for all u in their domain; take
weighted average
Z
d̃Ψ (f , g ) = dΨ (f (u), g (u))dµ(u)
Z
= Ψ(f ) − Ψ(g ) + Ψ0 (g )(f − g ) dµ
(13)
(14)
I
Zero iff f = g (a.e.); no normalization condition on f or g
I
Fix f , omit terms not depending on g ,
Z
J(g ) =
− Ψ(g ) + Ψ0 (g )g − Ψ0 (g )f dµ
Michael Gutmann
NCE and its Generalizations
(15)
24 / 27
Estimation of unnormalized models
J(g ) =
R
− Ψ(g ) + Ψ0 (g )g − Ψ0 (g )f dµ
I
Idea: Choose f , g , and µ so that we obtain a computable cost
function for consistent estimation of unnormalized models.
I
Choose f = T (px ) and g = T (φ) such that
f = g ⇒ px = φ
(16)
Examples:
I
I
I
I
f = px , g = φ
px
φ
, g = νp
f = νp
y
y
...
Choose µ such that the integral can either be computed in
closed form or approximated as sample average.
(Gutmann and Hirayama, 2011)
Michael Gutmann
NCE and its Generalizations
25 / 27
Estimation of unnormalized models
(Gutmann and Hirayama, 2011)
I
Several estimation methods for unnormalized models are part
of the framework
I
I
I
I
I
I
Noise-contrastive estimation
Poisson-transform (Barthelmé and Chopin, 2015)
Score matching (Hyvärinen, 2005)
Pseudo-likelihood (Besag, 1975)
...
Noise-contrastive estimation:
Ψ(u) = u log u − (1 + u) log(1 + u)
(17)
νpy (u)
dµ(u) = px (u)du (18)
f (u) =
px (u)
(proof in appendix)
Michael Gutmann
NCE and its Generalizations
26 / 27
Conclusions
I
I
Point estimation for parametric models with intractable
partition functions (unnormalized models)
Noise contrastive estimation
I
I
I
I
Estimate the model by learning to classify between data and
noise
Consistent estimator, has MLE as limit
Applicable to large-scale problems
Bregman divergence as general framework to estimate
unnormalized models.
Michael Gutmann
NCE and its Generalizations
27 / 27
Appendix
Maximizer of the NCE objective function
Noise-contrastive estimation as member of the Bregman framework
Michael Gutmann
NCE and its Generalizations
1 / 10
Appendix
Maximizer of the NCE objective function
Noise-contrastive estimation as member of the Bregman framework
Michael Gutmann
NCE and its Generalizations
2 / 10
Proof of Equation (4)
For large sample sizes n and m, θ̂ satisfying
G (u; θ̂) =
m py (u)
n px (u)
is maximizing JnNCE (θ),
NCE
Jn
1
(θ) =
n
n
X
log P(C = 1|xi ; θ) +
i=1
m
X
!
log [P(C = 0|yi ; θ)]
i=1
without any normalization constraints.
Michael Gutmann
NCE and its Generalizations
3 / 10
Proof of Equation (4)
NCE
Jn
1
(θ) =
n
=
n
X
i=1
n
1X
n
log P(C = 1|xi ; θ) +
m
X
!
log [P(C = 0|yi ; θ)]
i=1
m
log P(C = 1|xi ; θ) +
t=1
m1 X
log [P(C = 0|yi ; θ)]
nm
t=1
Fix the ratio m/n = ν and let n → ∞ and m → ∞. By law of
large numbers, JnNCE converges to J NCE ,
J NCE (θ) = Ex (log P(C = 1|x; θ)) + νEy (log P(C = 0|y; θ)) (19)
With P(C = 1|x; θ) =
1
1+G (x;θ)
Michael Gutmann
and P(C = 0|y; θ) =
NCE and its Generalizations
G (y;θ)
1+G (y;θ)
...
4 / 10
... we have
J NCE (θ) = − Ex log(1 + G (x; θ)) + νEy log G (y; θ)−
νEy log (1 + G (y; θ))
(20)
Consider the objective J NCE (θ) as a function of G rather than θ,
J NCE (G ) = − Ex log(1 + G (x)) + νEy log G (y) − νEy log (1 + G (y))
Z
= − px (ξ) log(1 + G (ξ))dξ+
Z
ν py (ξ) (log G (ξ) − log(1 + G (ξ)))
Compute functional derivative δJ NCE /δG ,
px (ξ)
1
1
δJ NCE (G )
=−
+ νpy (ξ)
−
δG
1 + G (ξ)
G (ξ) 1 + G (ξ)
Michael Gutmann
NCE and its Generalizations
(21)
5 / 10
δJ NCE (G )
px (ξ)
1
1
=−
+ νpy (ξ)
−
δG
1 + G (ξ)
G (ξ) 1 + G (ξ)
1
px (ξ)
+ νpy (ξ)
=−
1 + G (ξ)
G (ξ)(1 + G (ξ))
!
=0
(22)
(23)
(24)
We obtain
px (ξ)
1
= νpy (ξ) ∗
∗
1 + G (ξ)
G (ξ)(1 + G ∗ (ξ))
G ∗ (ξ)px (ξ) = νpy (ξ)
py (ξ)
G ∗ (ξ) = ν
px (ξ)
m py (ξ)
=
n px (ξ)
(25)
(26)
(27)
(28)
Evaluating ∂ 2 J NCE /∂G 2 at G ∗ shows that G ∗ is a maximizer.
Michael Gutmann
NCE and its Generalizations
6 / 10
Appendix
Maximizer of the NCE objective function
Noise-contrastive estimation as member of the Bregman framework
Michael Gutmann
NCE and its Generalizations
7 / 10
Proof
In noise-contrastive estimation, we maximize
NCE
Jn
1
(θ) =
n
n
X
log P(C = 1|xi ; θ) +
i=1
m
X
!
log [P(C = 0|yi ; θ)]
i=1
Sample version of
J NCE (θ) = Ex (log P(C = 1|x; θ)) + νEy (log P(C = 0|y; θ))
With
P(C = 1|u; θ) =
1
1 + G (u; θ)
P(C = 0|u; θ) =
1
1 + 1/G (u; θ)
J NCE (θ) = −Ex log(1 + G (x; θ)) − νEy log(1 + 1/G (y; θ)) (29)
where G (u; θ) =
νpy (u)
φ(u;θ) .
Michael Gutmann
NCE and its Generalizations
8 / 10
The general cost function in the Bregman framework is
Z
J(g ) =
− Ψ(g ) + Ψ0 (g )g − Ψ0 (g )f dµ
(30)
With
Ψ(g ) = g log(g ) − (1 + g ) log(1 + g )
0
Ψ (g ) = log(g ) − log(1 + g )
(31)
(32)
we have
Z
J(g ) =
− g log(g ) + (1 + g ) log(1 + g )
+ log(g )g − log(1 + g )g
− log(g )f + log(1 + g )f dµ
Michael Gutmann
NCE and its Generalizations
(33)
9 / 10
Z
J(g ) =
Z
=
log(1 + g ) − log(g )f + log(1 + g )f dµ
(34)
log(1 + g ) + log(1 + 1/g )f dµ
(35)
With
f (u) =
νpy (u)
px (u)
g (u) = G (u; θ)
dµ(u) = px (u)du
(36)
we have
Z
J(G (.; θ)) =
px (u) log(1 + G (u; θ))du
+ νpy (u) log(1 + 1/G (u; θ))du
=−J
NCE
Michael Gutmann
(θ)
(37)
(38)
NCE and its Generalizations
10 / 10