Complete 4-parametric Complexity Classification of Short Shop Scheduling Problems ?
advertisement
Noname manuscript No.
(will be inserted by the editor)
Complete 4-parametric Complexity Classification
of Short Shop Scheduling Problems?
Alexander Kononov · Sergey Sevastyanov · Maxim Sviridenko
Received: date / Accepted: date
Abstract We present a comprehensive complexity analysis of classical shop scheduling problems
subject to various combinations of constraints imposed on the processing times of operations, the
maximum number of operations per job, the upper
bound on schedule length, and the problem type
(taking values “open shop”, “job shop”, “mixed
shop”). It is shown that in the infinite class of such
problems there exists a finite basis system that
allows one to easily determine the complexity of
any problem in the class. The basis system consists of ten problems, five of which are polynomially solvable, and the other five are NP-complete.
(The complexity status of two basis problems was
known before, while the status of the other eight is
determined in this paper.) Thereby the dichotomy
property of that parameterized class of problems
is established. Since one of the parameters is the
bound on schedule length (and the other two numerical parameters are tightly related to it), our
research continues the research line on complexity
analysis of short shop scheduling problems initiated for the open shop and job shop problems in
the paper by Williamson et al. (1997). We improve
on some results of that paper.
FA
preliminary version of this paper was published in [22]
Alexander Kononov
Sobolev Institute of Mathematics, Siberian Branch of the
Russian Academy of Sciences, Novosibirsk, Russia;
E-mail: alvenko@math.nsc.ru
Sergey Sevastyanov
Sobolev Institute of Mathematics, Novosibirsk State University, Novosibirsk, Russia; E-mail: seva@math.nsc.ru
Maxim Sviridenko
IBM T.J. Watson Research Center, Yorktown Heights,
USA; E-mail: sviri@us.ibm.com
1 Introduction
Probably, the first complexity classification result
was the well-known result due to Schaefer [33].
He considered a constrained satisfaction problem
and derived an infinitely large subclass of NP that
had a so called dichotomy property. This property
means that every problem in the class is either in
P or is NP-complete, thereby explicitly excluding
the case of existing (in a given subclass of NP)
a problem of an “intermediate” complexity. There
are a few natural ways (see [7] and [18]) to generalize this dichotomy theorem, but many questions
in this area still remain open. In the present paper this kind of questions is studied with respect
to classical shop scheduling problems — job shop
and open shop without preemption, as well as to
their “mixture” called a mixed shop problem.
Shop scheduling problems appear ubiquitously
in modeling of many real-life phenomena such as
manufacturing production lines, packet exchange
in communication networks, timetabling, etc. They
received much attention from researchers in different communities [14]. One of the fundamental
goals of this research is to classify the problems
into “easy” and “hard” with respect to their exact
solution. Definitely, in contemporary complexity
theory there are many “formal” and “informal” notions of hardness. In our paper “easy” problems are
assumed to be polynomially solvable, while “hard”
ones should be NP-complete or NP-hard.
It was not surprising that the majority of shop
scheduling problems appeared to be “hard” in the
above sense. Shop scheduling problems considered
in our paper are also notorious to be difficult from
both practical and theoretical perspectives.
Problem settings and main notation. The
job shop is a multi-stage production process with
the property that the jobs from a given set {J1 , . . . ,
.
Jn } = J have to be processed on a given set of
.
machines {M1 , . . . , Mm } = M, and each job may
have to pass through several machines. More precisely, each job Jj is represented by a chain of νj
operations O1j , . . . , Oνj j , which means that operation Oi−1,j must be completed before operation
Oij starts processing. Every operation Oij is preassigned a machine Mij ∈ M (on which it has to
be processed without interruption) and an integral
processing time or length pij . (We allow the values
pij = 0, which is meaty for job-shop-type problems.) In any feasible schedule for those n jobs,
at any moment in time (except maybe for a finite
set of moments) every job can be processed by at
most one machine and every machine can execute
at most one job.
The fourth parameter M taken in our paper for
the complexity analysis is the problem type which
will take values from the partially ordered set {J,
b (J + O), (J + O)};
b here J, O,
b and O stand for
O, O,
the job shop, the open shop, and the classical open
b denote
shop respectively, while (J +O) and (J + O)
1
their mixtures. On pairs of elements of this set we
define a relation ≤, where X ≤ Y means that the
problem type X is a sub-type of Y (equivalently,
the set of instances of problem Y includes the set
instances of problem X). The relation ≤ is defined
b O ≤ (J + O), O
b ≤ (J +
for the pairs: O ≤ O,
b J ≤ (J + O), (J + O) ≤ (J + O),
b as well as
O),
for the pairs X ≤ X for all possible values X of
parameter M and for all transitive closures of the
above pairs. The minimum makespan among all
∗
feasible schedules will be denoted by Cmax
.
We will consider an infinite class of decision
problems, each being a subproblem of the mixed
b with an upper
shop scheduling problem (J + O)
bound on schedule length. The question in this decision problem is whether a feasible schedule exists
under given constraints on the chosen key parameters. The constraints will be imposed by specifying
upper bounds (delimiters) on the key parameters.
The delimiters for the parameters M, pmax , ν, and
C will be denoted by M, p̄, ν̄, and C̄ respectively.
They compound a 4-dimensional vector-delimiter
(M, p̄, ν̄, C̄) whose particular values define a particular representative in the class of subproblems.
It should be noticed that while constraints of
the type ν ≤ 3 or pij ∈ {1, 2} impose restrictions on the set of inputs of a given problem (and
thereby define a subproblem), this is not the case
for constraints of the type Cmax (S) ≤ C which
impose restrictions on the problem output. As a
direct consequence, there is a principle difference
between these two types of constraints in that how
they affect the problem complexity. Clearly, constraints of the type pij ≤ p̄ imposed on the set of
problem inputs imply a monotonous dependance
of the problem complexity on the parameter p̄ (the
larger the bound p̄, the harder the problem). But
this is not true with respect to the bound C imposing a constraint on the problem output. (In some
cases increasing the bound C makes the problem
easier.) However, considering C as part of the in-
The (general) open shop differs from the job
shop in that the ordering of the operations of each
job is not fixed and should be chosen by the scheduler. Furthermore, in the classical open shop we
additionally assume that every job may have at
most one operation per machine. Finally, in a mixed
shop there may be both jobs of the “open shop
type” (with a non-fixed order of operations) and
jobs of the “job shop type” (with chain-type precedence constraints on the set of job operations).
The goal is to find a feasible schedule with the
minimum makespan (or length), which in our case
coincides with the maximum job completion time
Cmax . In the decision problem our goal is checking
the existence of a feasible schedule with length no
more than a given parameter C. In this case the
value of that parameter is part of the input.
Clearly, each scheduling problem can be described in terms of many parameters. Beside the
parameter C, in the complexity analysis of our
scheduling problems we will focus on such related
parameters as the maximum processing time of an
operation (pmax ), and the maximum number of operations per job (ν). It is clear that tough restrictions imposed on schedule length imply also constraints on pmax and ν (at least, C bounds the
number of non-zero operations per job). On the
other hand, these two parameters can be considered as independent ones (which is especially true
for long schedules). The dependance of the problem complexity on each of these parameters, being
taken separately, was investigated in many papers
(for details, see section “Known results”).
1 Although in other papers the mixed shop scheduling
problem is denoted by a single letter X, it sometimes produces a mishmash (e.g., Masuda et al. [28] denote by X a
different problem (F + O), where F stands for the flow shop
problem). To avoid possible confusion, we decided to use the
above “direct” notation for the mixed shop problems under
consideration.
2
put and imposing a constraint of the type C ≤ C̄,
we obtain the monotonous dependance of the problem complexity on parameter C̄ (the larger C̄, the
wider the set of problem instances, the harder the
problem).
As mentioned above, any subproblem in the
class is uniquely defined by its vector-delimiter
(M, p̄, ν̄, C̄). We will use this short notation in Table 2. However, in the main part of the paper we
will use the more traditional three-field notation
[24] for denoting scheduling problems, where the
constraints on the parameters ν, pmax , and C will
be explicitly specified in the second field (in the
form of inequalities), while in the first field, instead
of a constraint of the form M ≤ M imposed on
types of instances included into a given subproblem, we will specify just the most general problem
type M. Finally, in the third field we will write either the objective function Cmax (if we speak on an
optimization problem), or the inequality Cmax ≤ C
(if we consider a decision problem).
polynomial time, while the same procedure with
respect to schedules of length 4 is NP-complete for
both problems.
General overview and motivation. One of
the popular ways to draw a boundary between easy
and hard scheduling problems with an integer valued objective function F (S) is to show for some
integer K ≥ 1 that checking the existence of a
schedule S with value F (S) ≤ K −1 is a polynomially solvable problem while the problem of deciding if there exists a feasible schedule S with value
F (S) ≤ K is NP-complete. Note that the latter result implies also a non-approximability result: the
existence of a polynomial time approximation algorithm with ratio performance guarantee better
than (K + 1)/K implies P = N P .
Among most popular results of this type there
are those obtained for the minimum makespan objective (so called “short scheduling” results). The
first example of such result in scheduling is the
proof that deciding if there exists a schedule of
length 3 for identical parallel machines with precedence constraints between jobs is an NP-complete
problem due to Lenstra and Rinnoy Kann [25].
Later on, this approach was applied to unrelated
parallel machine scheduling [27], scheduling with
communication delays [15], no-wait job shop scheduling [1], and many other scheduling models.
As far as shop scheduling problems with the
minimum makespan objective is concerned, the first
complexity analysis of “short shop” scheduling problems was performed by Williamson et al. [40], who
showed that checking the existence of a feasible
schedule of length 3 for a given instance of the
open shop or job shop problem can be realized in
3
The first line of our research also concerns the
complexity analysis of short shop scheduling problems, i.e., the dependence of the problem complexity on the parameter C and related parameters, ν
and pmax . Of the most interest, to our opinion, is
establishing the dependance of the problem complexity on combinations of constraints on these parameters. The main target of this (so called “multiparametric” [34]) complexity analysis is performing a complete complexity analysis on the infinite
class of decision problems defined for all possible
combinations of constraints on chosen key parameters, and as a convenient tool for performing such
analysis we use the notion of a basis system of subproblems (see Section 7 for definitions). When such
a basis system is determined and is finite, to derive
the complexity of any problem in the class, it is sufficient to compare its vector-delimiter with that of
every basis subproblem. If the vector is majorized
by the vector-delimiter of a polynomially solvable
basis subproblem, we deduce that the problem under investigation is polynomially solvable. Alternatively, if the vector majorizes the vector-delimiter
of an NP-complete basis subproblem, our subproblem is also NP-complete. (By the definition of the
basis system, one of the above alternatives must
hold, when such a system exists.) Thus, proving
the existence of a basis system in a given class of
subproblems implies its dichotomy property.
In the above mentioned paper [33], Schaefer
proposed an alternative approach to perform a complete complexity analysis on an infinite class of
problems. For satisfiability problems of boolean
formulas, where each problem was defined by a
finite set of boolean functions, he showed that to
determine the complexity of any problem defined
by a given set S, it is sufficient to check whether
the set meets at least one property from a given finite list. Since each of the properties can be easily
checked, this provides an efficient tool for determining the complexity of a given problem. However, to attain this goal, we need not compare the
determinant set S with other sets (maybe, specifying some “basis problems”), and no such “basis
problems” are defined for a given list of properties
either, which demonstrates the difference between
two approaches.
Another line of our research concerns the question of how the mixture of different types of problems affects the problem complexity. As is known,
a mixed problem may sometimes have properties
drastically different from the properties of its “parts”.
Such phenomenon with respect to the open shop
and the job shop problems with preemption allowed and integral input data was reported in [2].
It is known that for each of the two scheduling
problems there always exists an optimal schedule
with integral preemptions only. However, as shown
in [2], the mixture of these two problems results in
a problem for which we might not be able to guarantee the integrality property for all preemptions.
Furthermore, the optimal schedule length may be
fractional.
A similar phenomenon of appearing a new property in a mixed shop problem is demonstrated in
the current paper with respect to the computational complexity issue. As proved in [40], the existence of a feasible schedule of length 3 for a given
instance of the open shop or job shop problem can
be checked in polynomial time. In contrast to this
result, it is shown in our paper that the mixture
of these two problems results in an NP-complete
problem for the same question. That is why the
problem type (open shop, job shop or mixed shop)
is chosen in our paper for a key parameter in the
multi-parametric complexity analysis.
Known Results. Complexity of exact solution. Ordinary NP-hardness of job shop and open
shop problems was shown in [26] and [13] already
for two and three machines respectively. Their
strong NP-hardness for the variable number of machines directly follows from the NP-hardness results obtained in [40] for short shop scheduling
problems. Efficient algorithms are known for very
restricted settings only, having either a constant
number of jobs, or two machines, or special properties of processing times, etc. [5,24]. A practical proof of the intractability of these problems is
that a small example of the job shop problem with
10 jobs and 10 machines suggested by Fisher and
Thompson [9] in 1963 remained open for over 20
years until it was solved by Carlier and Pinson [4].
For further references and a survey of the area, see
Lawler, Lenstra, Rinnooy Kan, and Shmoys [24]
and Chen, Potts, and Woeginger [5].
Complexity analysis of short shop scheduling
problems. Williamson et al. [40] proved that deciding if there exists a feasible schedule of length 3
and finding such a schedule can be solved in polynomial time for the open shop and job shop problems. On the negative side, they showed that the
decision problems hJ | pij = 1, ν ≤ 3 | Cmax ≤ 4 i
4
and hO | pij ∈ {1, 2}, ν ≤ 3 | Cmax ≤ 4 i are NPcomplete.
Analysis of problems with constraints on the parameter ν. Jackson [17] presented an exact polynomial time algorithm for the two-machine job
shop problem hJ2 | ν ≤ 2 | Cmax i. Lenstra et al.
[26] showed that the two-machine job shop problem becomes NP-hard even if there is only one job
with three operations, while all other jobs have
one operation per job. (Thus, hJ2 | ν ≤ 3 | Cmax i
is NP-hard.) On the other hand, Neumytov and
Sevastyanov [30] proved NP-hardness of hJ3 | ν ≤
2 | Cmax i (even in the special case when there are
only two types of job routes through machines:
M1 → M3 and M2 → M3 ).
It remains unknown since 1976 (when this question was posed by Gonzalez and Sahni [13]) whether
the three-machine open shop problem with at most
two operations per job, i.e., hO3 | ν ≤ 2 | Cmax i,
is polynomially solvable or NP-hard. Two special
cases of this problem were shown to be polynomially solvable. First, it was proved by Drobouchevitch
and Strusevich [8] that the case with a bottle-neck
machine (on which every job has one of its two operations) is polynomially solvable. Next, in [19] the
problem was shown to be solvable in linear time for
any class of instances in which one of machines has
load at least 3pmax .
Analysis of problems with constraints on the
maximum processing time of an operation. First,
it is well known [13] that the open shop problem
b | pmax ≤ 1 | Cmax i is just the bipartite multihO
graph edge-coloring problem, and therefore is polynomially solvable. In fact, a lot of complexity results were obtained for scheduling problems with
unit processing times. We refer the reader to [3]
and [36] for comprehensive surveys of such results
and corresponding references.
Complexity analysis of mixed shop scheduling
problems. As demonstrated in the comprehensive
survey paper by Shakhlevich et al. [35], the mixed
shop problem received much attention in scheduling literature, where the problem complexity was
analyzed subject to restrictions on such problem
parameters as the number of machines, the number of the “job-shop-type” jobs, and the number
of the “open-shop-type” jobs.
Multi-parametric complexity analysis. The first
complete 4-parametric complexity analysis was performed in [21] for the connected list coloring problem posed by Vizing [37]. Later on, a similar 4parametric analysis was undertaken in [20] for the
open shop problem with respect to such parame-
ters as the number of machines m, the maximum
number of operations per machine µ, the number
of jobs n, and the maximum number of operations per job ν. It was shown that if we exclude so
called “trivial” subproblems from the class of subproblems generated by all possible combinations
of constraints on the above four parameters, then
the remaining infinite class possesses a finite basis
system consisting of either 8 or 12 subproblems.
(A subproblem is called “trivial”, if the total number of operations in every instance is bounded by a
predefined constant or if each job consists of a single operation. — All such problems can be solved
in linear time.) The exact size of the basis system will become known after obtaining a (negative
or positive) answer to the above mentioned open
question posed by Gonzalez and Sahni. However,
even that incomplete information on the basis system enabled the authors of [20] to perform a nearly
complete complexity analysis of the aforesaid class
of subproblems. (In fact, the complexity status of
only two subproblems remained open: hO3 | ν ≤
2 | Cmax i and its symmetrical counterpart hO | n ≤
3, µ ≤ 2 | Cmax i.) Some general theoretical results
on multi-parametric complexity analysis were presented in [34], where the notion of the basis system
of subproblems was introduced and the conditions
providing the existence, the uniqueness and the
finiteness of such a system were established.
3.
4.
5.
6.
7.
Our Results. In this paper we study the complexity of exact solution of five shop scheduling
b (J + O), and (J + O)
b with the
problems: J, O, O,
minimum makespan objective. The problems are
investigated subject to constraints imposed on the
processing times of operations, on the maximum
number of operations per job (ν), and on an upper bound on schedule length (C). In the complexity analysis of the class of subproblems of the
b we will consider two engeneral problem (J + O)
coding schemes: the “ordinary” and the “compact”
one. It will be shown that they produce equivalent
complexity classifications of subproblems from the
considered class. Specifically, the following results
have been obtained.
the above algorithm for the job shop problem.
Although it is known that the general graph
orientation problem can be reduced to the Max
Flow computation, we show that for the class
of instances corresponding to the mixed shop
problem there exists a linear time algorithm.
Deciding if there exists a schedule of length 2
b || Cmax ≤ 2 i, is
for a mixed shop, i.e., h(J + O)
a polynomially solvable problem (Theorem 3).
h(J + O) | pij = 1, ν ≤ 3 | Cmax ≤ 3 i is NPcomplete (Theorem 4).
h(J + O) | pij ∈ {1, 2}, ν ≤ 2 | Cmax ≤ 3 i is
NP-complete (Theorem 5).
hO | pij ∈ {1, 2}, ν ≤ 2, µ ≤ 3 | Cmax ≤ 4 i is
NP-complete (Theorem 11). This result tightens the result from [40] (that hO | pij ∈ {1, 2},
ν ≤ 3, µ ≤ 3 | Cmax ≤ 4 i is NP-complete) and
closes the open question posed in [20]. (It was
proved in [20] that hO | pij ≤ 3, ν ≤ 2, µ ≤
3 | Cmax ≤ 6 i is NP-complete. Since a similar
decision problem with the constraint Cmax ≤ 3
was known to be polynomially solvable [40],
this left open the question on the complexity
status of the problems with intermediate constraints Cmax ≤ 4 and Cmax ≤ 5. Our result
fills in this gap.)
The problem hJ | pij ∈ {1, 2}, ν ≤ 2 | Cmax ≤
4 i is NP-complete (Theorem 8). (The proof of
this result uses a new type of gadgets different
from the ones used in [40].)
We also achieved a complete complexity analysis on the infinite class of subproblems of problem
b with constraints on the above mentioned
(J + O)
key parameters in the form of inequalities:
M ≤ M, pij ≤ p̄, ν ≤ ν̄, C ≤ C̄.
(1)
Thus, each subproblem in the class is defined by its
vector-delimiter (M, p̄, ν̄, C̄) specifying the problem type and specific constraints of type (1). As we
established, the class of problems has a finite basis
system consisting of ten problems (Theorem 12).
Five of them, namely, those defined by the vectorb 1, 2, ∞), ((J + O),
b ∞, ∞, 2),
delimiters ((J + O),
b ∞, ∞, 3), (O,
b 1, ∞, ∞) are proved
(J, ∞, ∞, 3), (O,
to be polynomially solvable, while the other five,
defined by the vector-delimiters ((J + O), 2, 2, 3),
((J + O), 1, 3, 3), (O, 2, 2, 4), (J, 2, 2, 4), (J, 1, 3, 4)
are N P -complete. Thus, knowing the basis system
not only implies the dichotomy property of this
infinite class, but also enables one to easily determine the complexity of any problem in the class.
1. The job shop problem with at most two operations per job and unit processing times, i.e.,
hJ | pij = 1, ν ≤ 2 | Cmax i, is polynomially solvable (Theorem 1). (The algorithm is based on
the bipartite edge coloring.)
2. The more general mixed shop problem h(J +
b | pij = 1, ν ≤ 2 | Cmax i is polynomially solvO)
able, too (Theorem 2). The algorithm is a combination of a graph orientation algorithm and
Paper outline. The paper is organized as follows. In Section 2 we consider two different encod5
ηij denotes the total number of such operations.
We also specify different job types and the number of jobs of each type. Thus, the input consists
of the number of job types (Λ) and of a sequence
of pairs (λ1 , A(1) ), ..., (λΛ , A(Λ) ), where A(k) is the
vector specifying the k-th job type, and λk is the
number of jobs of that type:
ing schemes (both pretending to be “reasonable”,
although being non-equivalent), called “ordinary”
and “compact”. (Our further complexity results
will be established in both encodings.) Next, in
Section 3 we design polynomial time algorithms
for the job shop and the mixed shop optimization problems with the minimum makespan objective in the case of at most two operations per job
and unit processing times of operations. In Sections 4, 5, and 6 we provide complexity results for
the mixed shop, job shop and open shop decision
problems respectively with restrictions on schedule length. Basic definitions and notions of the
multi-parametric complexity analysis are given in
Section 7. The main result of this paper is formulated and proved in Section 8. It shows that all our
results presented in the previous sections, as well
as two previously known results constitute a basis
system of subproblems with respect to the chosen
key parameters, and therefore, none of those results can be improved. Finally, in Section 9 some
further research directions are formulated.
λk = |{Jj | Aj = A(k) }|.
Let us illustrate these two encoding schemes by
a short example. Suppose, we are given an instance
of the mixed shop problem with 3 machines and
170 jobs, 120 of which are job-shop-type jobs (of
two different types), and the other 50 are openshop-type jobs (all of the same type). So, there
are three job types, and in the compact encoding
scheme the input will look like:
Λ = 3, λ1 = 20, A(1) = (1, 5, (1, 2, 2),
(2, 1, 1), (1, 1, 1), (3, 2, 1), (3, 1, 2)),
λ2 = 100, A(2) = (1, 2, (1, 1, 1), (2, 1, 2)),
λ3 = 50, A(3) = (0, 3, (2, 1, 2), (2, 2, 1), (3, 1, 2)).
As one can see, the first and the second types
are job-shop-types, while the third one is an openshop-type. Each job from J1 to J20 has 7 operations on machines M1 , M1 , M2 , M1 , M3 , M3 , M3
consecutively. Each job from J21 to J120 has 3 operations on machines M1 , M2 , M2 consecutively. Finally, each job from J121 to J170 has 5 operations
that should be processed on machines M2 and M3
in an arbitrary order. So, in the “ordinary” encoding scheme the input will look like:
n = 170, m = 3, n0 = 120;
ν1 = 7, J1 = (M1 , 2), (M1 , 2), (M2 , 1), (M1 , 1),
(M3 , 2), (M3 , 1), (M3 , 1),
...
ν20 = 7, J20 = − − 00 − − ,
ν21 = 3, J21 = (M1 , 1), (M2 , 1), (M2 , 1),
...
ν120 = 3, J120 = − − 00 − − ,
ν121 = 5,
J121 = (M2 , 1), (M2 , 1), (M2 , 1), (M3 , 1), (M3 , 1),
...
ν170 = 5, J170 = − − 00 − − .
(In fact, the order of listing the operations of jobs
J121 to J170 may differ from job to job, because
in this encoding scheme we do not care about this
order for open-shop-type jobs.)
Assuming that each number in the input is
encoded (in both schemes) by binary digits, and
all numbers are separated from each other (e.g.,
by commas) and the point after the last number
serves as “the END of the input”, while all other
signs (like Latin letters or parentheses presented
2 Encoding the input data
As is known, the complexity of a problem essentially depends on the encoding scheme (e.s.) used
for encoding its input data. In our complexity analysis, for encoding instances of the mixed shop problem, we will use two different encoding schemes,
normally used for scheduling problems. In one of
them (called an “ordinary” e.s.) each operation Oij
is encoded individually by specifying its attributes
Aji = (Mij , pij ). We also specify the values of two
parameters: the overall number n of jobs and the
number n0 of job-shop-type jobs (assuming that
they have indices from 1 to n0 , while the remaining
indices are allotted for the open-shop-type jobs).
In another e.s. (called High Multiplicity, or
“compact” e.s., for short) we define a type of each
job Jj as a vector Aj = (zj , νj , Ãj1 , . . . , Ãjνj ), where
zj = 0 denotes an open-shop-type job, zj = 1 denotes a job-shop-type job, and νj is the number of
operation types of job Jj (rather than the number
of its operations); Ãji = (Aji , ηij ) denotes the pair:
an operation type (rather than a particular operation) and its multiplicity. In the case of job-shoptype jobs the operations of a given job are listed in
the order of their processing, and ηij denotes the
number of same-type operations that follow each
other in succession. For open-shop-type jobs the
operations of a given job are listed in lexicographically increasing order of operation types Aji , and
6
∆1k + ∆2k . Since in this section we consider shop
scheduling problems with unit processing times,
the load of a machine is equal to the number of operations that must be processed on that machine.
Since each machine can process at most one operation at a time and since every job can be processed
by at most one machine at a time, we obtain the
following lower bound on the optimal makespan
.
∗
Cmax
≥ L = max max{∆k , ∆1k + 1, ∆2k + 1}.
above just for ease of reading) are omitted, we can
calculate the input size for both schemes. For the
“compact” one it occurs to be 115, while for the
“ordinary” scheme it is equal to 3999.
It can be easily seen that both encoding schemes
meet the two demands on “reasonable” encoding
schemes made by Garey and Johnson [11]. Indeed,
they admit decoding and are “compact enough”.
However, in general, these two encoding schemes
are non-equivalent. While the input size in the
compact encoding can never be greater than twice
the input size in the “ordinary” encoding, the inverse relation between these two amounts can be
arbitrarily close to the exponent function 4x . Thus,
it might be expected that for some sub-problems of
the general mixed shop problem these two schemes
can produce distinct complexity results. Surprisingly, as we will ascertain in this paper, for the
class of problems under consideration both encoding schemes produce the same results on complexity classification.
k
The next theorem shows that this lower bound is
tight for a special case of the job shop problem.
Theorem 1 For any instance of the job shop problem hJ | pij ≤ 1, ν ≤ 2 | Cmax i there exists a sched∗
ule of length Cmax
= L which can be found in polynomial time under both encoding schemes of the
input data.
Proof Consider the following directed multigraph
→
−
−
→
G = (M, A). The vertices of G correspond to machines, and the arcs (M1j , M2j ) correspond to jobs
−
→
Jj ∈ J , i.e., the jobs with two unit operations on
different machines. Thus, ∆1k and ∆2k correspond
to the outdegree and indegree of vertex Mk ∈ M.
−
→
A linear factor in multigraph G is a subgraph such
that indegree and outdegree of every vertex is at
most one. Let δ = maxk max{∆1k , ∆2k } be the
−
→
maximum semi-degree in graph G .
−
→
Given a directed multigraph G , we can define
a bipartite multigraph G0 with m vertices in each
−
→
part by assigning to each arc (M 0 , M 00 ) ∈ G an
edge (M 0 , M 00 ) ∈ G0 with M 0 in the left part and
M 00 in the right part. Clearly, the maximum vertex
degree of G0 is equal to δ. In the classical paper [23]
König showed that the edges of such a bipartite
multigraph G0 can be colored with δ colors. Applying this theorem, we can find a decomposition
→
−
of multigraph G into δ linear factors. Let the numbers 1 to δ be arbitrarily assigned to those linear
−
→
factors. Assign to both operations of job Jj ∈ J
the number of the linear factor to which the arc
(M1j , M2j ) belongs. Define the schedule, where all
first operations on each machine Mk are processed
in the time interval [0, ∆1k ] and all second operations are processed in the time interval [L−∆2k , L]
in the increasing order of the numbers of the assigned linear factors.
The feasibility of this schedule with respect to
each machine Mk follows from the inequality L ≥
∆1k +∆2k , while the feasibility with respect to each
job Jj assigned to the k-th linear factor follows
from the inequality L ≥ δ + 1 and the evident observation that its first operation O1j is completed
3 Polynomial Time Algorithm
for the Mixed Shop Scheduling Problem
with at Most Two Unit Operations per Job
The multigraph edge coloring theorem due to Melnikov and Vizing [29, Theorem 2.2.1] will be reformulated in this section for the job shop scheduling
problem with unit processing times. Next we show
how to extend this result to the mixed shop problem. Note that the above graph coloring result was
next generalized by Pyatkin [31], and then a very
simple proof was provided by Vizing [38].
First it should be noted that zero-length operations can produce no collision in schedule in the
case pij ≤ 1, since there are no operations of length
greater than 1 that would have to be “split” by
zero-length operations. Thus, we may further assume that we have unit length operations only.
We partition the set of jobs into two subsets
−
→
−
→
J = J ∪ Je . The subset J is the set of jobs with
exactly two operations that must be processed on
different machines, and Je is the set of the remaining (“easy”) jobs, each having all its operations
on the same machine. Note that the original proof
from [29] works in the case when Je = ∅ but can
be easily generalized
to handle jobs from Je .
P
Let ∆k =
be the total load
Oij |Mij =Mk pijP
−
p1j
of machine Mk , and let ∆1k = J ∈→
j J |M1j =Mk
P
−
p2j be the total length
and ∆2k = J ∈→
j J |M2j =Mk
of the first and second operations of jobs from
−
→
J on machine Mk respectively. Obviously, ∆k ≥
7
not later than by time k, while its second operation
O1j starts not earlier than at time L − δ + k − 1.
Finally, the jobs from Je can be scheduled within time periods [∆1k , L − ∆2k ] in a greedy way.
The running time of this algorithm is dominated by that of the algorithm of δ-edge-coloring
of the bipartite multigraph G. Applying the edgecoloring algorithm by Cole, Ost and Schirra [6], we
can perform the decomposition in O(n log(δ + 1))
time. (“+1” is added for correctness, since δ = 0
is possible in our problem in the case when the set
−
→
of jobs J is empty.) Therefore, the total running
time can be bounded by O(n log µ) under the ordinary encoding scheme, where µ is the maximum
number of operations per machine.
For the bipartite edge coloring problem under
the High Multiplicity encoding of input data there
are algorithms that also perform well. For instance,
the algorithm of Gabow and Kariv [10] has the
running time O(mΛ log λ) (where Λ is the number
of job types, λ = maxk λk , and λk is the number
of jobs of the k-th type) which is, clearly, polynomial in the size of the input under this “compact”
encoding. u
t
an orientation problem is its reduction to Hoffman’s Circulation Theorem ([32, Theorem 61.2]).
Finding a circulation is equivalent to the one maximum flow computation ([32, Theorem 11.3]).
Recently [39] Vizing solved a somewhat more
general problem and presented an algorithm which
obtains an orientation of a mixed multigraph in
O(|J ||J¯|) time. In Lemma 1 formulated below we
provide a more efficient way to compute the orientation O minimizing the function L(O).
Let ∆ = maxk ∆k be the maximum machine
−
→
load. In what follows the sets of jobs J¯ and J ,
as well as the set of arcs A and vertex degrees
∆1k , ∆2k are assumed to be variable (specified for
a given partial orientation O0 of edges from E).
This means that an orientation of an edge
(M 0 , M 00 ) ∈ E immediately transfers the latter
from E to A, and the corresponding job — from
→
−
J¯ to J . For the subset E 0 ⊆ E of the remaining (non-oriented) edges and the set M0 of their
vertices we define graph G = (M0 , E 0 ).
Machine Mk will be called critical if ∆1k = ∆
or ∆2k = ∆. By Theorem 1, under any orientation
O of edges from E we have
∆ ≤ L(O) ≤ ∆ + 1,
We now consider the mixed shop scheduling
b | pij ≤ 1, ν ≤ 2 | Cmax i. In this
problem h(J + O)
problem the set of jobs is partitioned into three
−
→
→
−
subsets J = J¯ ∪ J ∪ Je , where J consists of jobshop type jobs with exactly two unit length operations on different machines; J¯ consists of similar
open-shop type jobs, and Je consists of the remaining “easy” jobs of both types (each such job has
all its operations on the same machine).
On the set of vertices M we define the set E
of edges (M1j , M2j ) corresponding to jobs Jj ∈ J¯.
In any feasible schedule the edges from E acquire
an orientation specified by the order of two operations of the corresponding jobs. Thus, specifying
an orientation O on edges from E, we come to a
−
→
job-shop problem with a new set of jobs J (O) and
the corresponding values ∆1k (O) and ∆2k (O). By
Theorem 1, the optimal schedule length for the obtained instance is equal to
and the value L(O) = ∆ is attained if and only
if there are no critical machines under orientation
O. Thus, our aim is to find an orientation O which
provides no critical machines (a positive answer ),
or to establish that such orientation does not exist (a negative answer ). In particular, we have the
negative answer at once if there exists a critical
machine for the initial (empty) orientation of edges
from E. Since this can be checked immediately (by
a single scanning of the input data), we can further
assume that the current instance contains no
critical machines.
The following proposition is evident.
Proposition 1 The orientation problem for edges
E 0 in graph G can be solved independently for each
connected component of G, and the positive answer
for the whole graph is attained if and only if it is
attained for every connected component. u
t
L(O) = max max{∆k , ∆1k (O) + 1, ∆2k (O) + 1}.
k
Thus, while solving the orientation problem, we
can assume that graph G is connected.
Thus, the considered case of the mixed shop problem can be solved by minimization of function L(O)
over all possible orientations O of edges from E.
The orientation problems are among well-studied problems of combinatorial optimization (see the
survey [32, Chapter 61]). The classical way to solve
Definition 1 Given a graph G, machine M ∈ M
(and the corresponding vertex) is called a no-problem machine (no-problem vertex ), if no orientation
O0 of edges in E 0 can make M a critical machine.
8
Proposition 2 Machine Mk ∈ M is a no-problem
machine if and only if it meets one of the following
properties:
(a) machine Mk contains operations of “easy” jobs;
(b) ∆k < ∆;
(c) ∆1k > 0 and ∆2k > 0.
Due to Proposition 3, we can further assume
that graph G contains no no-problem vertices.
Proposition 4 If the degree of each vertex in G
is at least 2, then the orientation problem has a
positive answer which can be obtained in O(|E|)
time.
Proof If none of the properties (a)–(c) holds, it
can be easily shown that machine Mk is not a noproblem machine, because there is an orientation
of edges in E 0 that makes the machine critical.
Indeed, in this case the degree of vertex Mk is equal
to ∆, and at least one of two semi-degrees ∆1k , ∆2k
is equal to zero. Let ∆2k = 0 (the case ∆1k =
0 is symmetrical). Then we can orient all edges
incident to Mk as arcs outgoing of Mk , thereby
making machine Mk critical.
Inversely, in each of the cases (a)–(c) it is easily
seen that no edge orientation can make the machine critical. u
t
Proof Starting with an arbitrary vertex M ∈ G
and an arbitrary edge incident to M , we easily
find a cycle C in graph G. Let us choose one of two
possible traversals of cycle C, thereby orienting the
edges of C and removing them from graph G. Then
each vertex of C will get one additional incoming
arc and one additional outgoing arc, thus becoming a no-problem vertex for the obtained partial
orientation. After removing the edges of C the resulting graph G0 may become disconnected. But
since G was connected, each vertex of G0 is connected with a (no-problem) vertex of cycle C, and
we can apply the algorithm of Proposition 3 providing the positive answer. u
t
Proposition 3 If G is connected and contains a
no-problem vertex then the orientation problem has
a positive answer which can be obtained in O(|E|)
time.
Definition 2 Vertex M ∈ M0 of graph G (and
the corresponding machine) is called sub-critical
if it has the unit degree d(M ) = 1 and one of
two possible orientations of the edge incident to
M makes machine M critical.
Proof Let M0 be a no-problem vertex in G = (M0 ,
E 0 ). (Due to Proposition 2, we can list all noproblem vertices in G in O(|E|) time.) By scanning the set E 0 , we construct a spanning tree T =
(M0 , ET ), compute the tree-degree dT (M ) of each
vertex M ∈ M0 , and orient all edges from E 0 \ ET
arbitrarily. Scan the set of vertices M0 and make
up the list L of leaves of T (i.e., vertices M ∈ M0
with dT (M ) = 1) except M0 . Let M ∈ L be the
first leaf in the list, and let e = (M, M 0 ) be the
only edge of T incident to M . If M is a no-problem
vertex, orient e arbitrarily. Otherwise, M is inci−
→
dent to an arc e0 ∈ A in graph G defined for jobs
→
−
from J . We may assume w.l.o.g. that e0 is an incoming arc for M . Then we make M a no-problem
vertex by making e an outgoing arc for M . Delete
M from G and T and decrease dT (M 0 ) by 1.If M 0
becomes a no-problem vertex under this orientation of e (which, due to Proposition 2, can be established in a constant time), we add M 0 to the
list of no-problem vertices. If M 0 becomes a leaf
(dT (M 0 ) = 1), we add it to the end of list L and
continue the above procedure, until vertex M0 remains the only vertex of the tree. Since it was a
no-problem vertex, we obtain the desired orientation with the positive answer.
It is clear that all steps of the procedure can
be implemented in time linear in |E 0 |. u
t
Suppose now that graph G contains a vertex
M of degree 1. It is clear that M may be either a
no-problem vertex or a sub-critical one. Since we
agreed that the first case is excluded, we should
only consider the case when there is a sub-critical
vertex M in G. The single edge e incident to M has
got the unique “positive” orientation (under which
the positive answer is still possible). This justifies
the following step of the orientation algorithm.
Eliminating the unit-degree vertices. Compute the degrees of all vertices of graph G and
make the list SC of all sub-critical vertices. Take
the first vertex M ∈ SC, choose the unique “positive” orientation of its single edge e = (M, M 0 ),
remove vertex M from the list and from graph G,
decrease by 1 the degree of vertex M 0 . If d(M 0 ) became equal to zero, this means that e was the last
edge in graph G, and that the process of orientation of edges came to an end. At that, if machine
M 0 became critical, this means that the answer is
negative and we could not avoid this. Otherwise,
we got the positive answer.
Alternatively, if d(M 0 ) became equal to 1, there
may be two possible cases: M 0 may become either
a no-problem machine or a sub-critical machine.
9
b |C ≤
Theorem 3 The decision problem h(J + O)
2 | Cmax ≤ C i is solvable in linear time.
In the first case we can complete the orientation
process with the positive answer, due to Proposition 3. In the second case we add machine M 0 to
the end of list SC and continue the process.
Now we are able to prove the ultimate result.
Lemma 1 The problem of minimization of the
function L(O) over all possible orientations O of
edges from E is solvable in linear time (under both
encoding schemes).
Proof The described above process of eliminating
the unit-degree vertices may finish with two possible outcomes. Either it exhausts all edges in G
(with the positive or negative answer), or it exhausts all unit degree vertices with the positive
answer which, by Proposition 4, can be found in
linear time.
Obviously, all parts of the described above orientation algorithm (including the algorithms of
Propositions 3 and 4 and the procedure of eliminating the unit-degree vertices) can be implemented
(under the “ordinary” encoding of the input data)
in time linear in the number of edges.
At the same time, it can be seen that the orientation algorithm is easy to implement in time
O(Λ) under the “compact” encoding scheme. We
just need to observe that if we have at least two
parallel edges between vertices u and v in graph G,
or equivalently, at least two identical “open shop
type” jobs, then we can orient them in the opposite directions. Both vertices u and v become
no-problem vertices after such orientation. Therefore, it suffices to consider the case when there is a
unique job of each “open shop type”, and so, both
encoding schemes are equivalent. This completes
the proof of Lemma 1. u
t
Theorem 1 and Lemma 1 imply the following
b |
Theorem 2 The mixed shop problem h(J + O)
pij ≤ 1, ν ≤ 2 | Cmax i can be solved in polynomial
time under both encoding schemes. u
t
In the subsequent sections all results will be
formulated and proved under the “ordinary” encoding of the input data. In Section 8 it will be
shown that all those results are also valid under
the “compact” encoding scheme.
Proof Of course, at the very beginning of the checking procedure we should eliminate the case when
there is a machine with load more than C or there
is a job with length more than C. Next, we can obviously eliminate all zero-length operations of the
open-shop-type jobs, as well as the beginning zerolength operations of the job-shop-type jobs (i.e.,
the operations, preceded by no non-zero operation
of its job) and the ending zero-length operations
of the job-shop-type jobs (i.e., the operations, succeeded by no non-zero operation of its job) — all
these operations should be scheduled either at the
beginning or at the end of the interval [0, C]. We
can also eliminate the trivial case C ≤ 1, when the
decision problem has always the positive answer.
So, we can further assume that C = 2. The remaining intermediate zero-length operations of the jobshop-type jobs produce no problem for scheduling
if they compete with no operation of length 2 on
the same machine. Otherwise, we have got a nonresolvable collision and have to report that “no feasible schedule exists”. So, we can further assume
that all operations have non-zero length.
Each unit length job can be easily scheduled at
the end of the checking procedure by inserting it
in an arbitrary empty space on the corresponding
machine. There is also no problem with scheduling
jobs of length 2 each having all its operations on
the same machine. So, we may further consider
only the jobs of length 2 consisting of two unit
operations on distinct machines.
Let J¯ again denote the set of such open-shoptype jobs. It is clear that all other jobs have the
only way to be placed in a schedule of length two,
in some cases producing an infeasible schedule.
In particular, an infeasible schedule appears when
there are two “first” or two “second” unit-length
operations of job-shop-type jobs on the same machine. If there exists such a collision, the answer to
the question of the decision problem is “no”, and
we can stop the checking procedure. Otherwise (if
there is no collision), only jobs from J¯ remain unscheduled. Thus, the answer can be obtained by
the algorithm of Lemma 1 in time linear in the
number of jobs. u
t
Next we show that the problem of deciding
whether a given instance of the mixed shop problem has a feasible schedule of length at most 3 is
NP-complete in two special cases. While proving
these NP-completeness results, we will use a reduction from the same NP-complete problem known in
4 Complexity Results for Short Scheduling
of Mixed Shops
In this section we consider mixed shop scheduling
problems, providing a tight complexity classification for those problems.
10
the literature as MONOTONE-NOT-ALL-EQUAL3SAT. Let us formulate this classical problem.
MONOTONE-NOT-ALL-EQUAL-3SAT [11].
We are given a set of boolean variables x1 , . . . , xn
and a set of clauses C1 , . . . , Cm . Each clause consists of three unnegated literals of those variables.
The goal is to assign values to boolean variables so
that each clause would contain at least one literal
with the “truth” value and at least one literal with
the “false” value.
An equivalent graph-theoretical formulation of
this problem is known as a cut problem in a 3uniform hypergraph.
In fact, the reduction schemes from the sample
NP-complete problem to two special cases of the
mixed shop scheduling problem have a lot in common. The common part of those constructions is
described below.
Suppose, we are given an instance of the MONOTONE - NOT - ALL - EQUAL - 3SAT problem.
Then we construct an instance of the mixed shop
scheduling problem as follows. Let ti be the number of occurrences of variable xi in clauses C1 , . . . ,
Cm . For each clause Cj = xj1 ∨ xj2 ∨ xj3 we define
a clause machine Cj , and for each variable xi we
introduce ti machines Mi1 , . . . , Miti and ti openshop-type clause jobs (one for each occurrence of
variable xi ). The clause job of the k-th occurrence
of xi has two unit-length operations: one on machine Mik and another on the corresponding clause
machine. Although the instance of the mixed-shop
problem will also contain other, non-clause jobs
(they will be defined later), each clause machine
will have to process only operations of clause jobs.
Assume that for non-clause jobs we can guarantee the following “synchronization” property consisting of the following two parts (it will be shown
later how to construct such a gadget).
(a) In any feasible schedule of length 3 specified for non-clause jobs and for each variable xi
the subschedule defined for machines Mi1 , . . . , Miti
meets one of the following alternatives: either all
those machines are simultaneously idle in the interval [2, 3] and busy in the interval [0, 2], or all
those machines are idle in the interval [0, 1] and
busy in the interval [1, 3].
(b) Both variants are realizable at our option
independently for each i.
Then we can show that there exists a schedule
of length 3 for the whole mixed-shop instance, if
and only if the MONOTONE-NOT-ALL-EQUAL3SAT instance is satisfiable.
First assume that there is a desired assignment
to variables {xi } of the MONOTONE-NOT-ALLEQUAL-3SAT instance. Let us show that there
exists a schedule of length 3 for the constructed
mixed-shop instance. To that end, we define a subschedule for non-clause jobs such that for each i =
1, . . . , n the machines Mi1 , . . . , Miti are kept idle in
the time interval [2, 3] if xi =“truth”, and are kept
idle in the time interval [0, 1] if xi =“false”. Consider now an arbitrary clause Cj = xj1 ∨ xj2 ∨ xj3 .
If it has one literal with the “truth” value and two
literals with the “false” values, then the operation
on the clause machine Cj that corresponds to the
variable with the “truth” value can be scheduled
in the time interval [0, 1], while the other two operations of that machine can be feasibly placed in
the time period [1, 3]. Alternatively, if clause Cj
has one variable with the “false” value and two
variables with the “truth” values, the operation on
machine Cj that corresponds to the “false” variable should be scheduled in the time interval [2, 3],
while the other two operations of that machine can
be feasibly placed in the time interval [0, 2].
Inversely, assume that there exists a feasible
schedule of length 3. Take the clause jobs corresponding to variable xi and consider their operations on machines Mi1 , . . . , Miti . If all those operations are scheduled in the interval [0, 1], we assign to xi the “false” value (and the corresponding clause jobs will be referred to as “false jobs”).
Otherwise (if all those operations are scheduled in
[2, 3]), we assign to xi the “truth” value (while
its clause jobs receive the name of “truth jobs”).
Thus, all variables xi receive their values. Now consider a clause Cj . Since the corresponding clause
machine Cj is feasibly scheduled in the interval
[0, 3], one of its operations (scheduled in the interval [0, 1]) definitely cannot be a “false job”. Therefore, it corresponds to a variable received the “truth”
value. Another operation on machine Cj (scheduled in the interval [2, 3]) cannot be a “truth job”,
and therefore, it corresponds to a variable received
the “false” value. Thus, the desired NOT-ALLEQUAL property holds for each clause Cj .
It remains to show how to define the “gadget”
on machines Mi1 , . . . , Miti providing their “synchronization” property. This can be done in different ways for two special cases considered in Theorems 4 and 5.
Theorem 4 The mixed shop scheduling problem
h(J + O) | pij = 1, ν ≤ 3 | Cmax ≤ 3 i, i.e., the
problem of deciding whether a given instance of
the mixed shop problem with at most 3 operations
11
per job and unit processing times has a schedule of
length at most 3, is NP-complete.
direction — in the decreasing order of indices {k}.
This provides part (a) of the “synchronization”
property.
Since it is clear that both variants are realizable, part (b) of the “synchronization” property is
also valid, which completes the proof of Theorem 4.
u
t
Proof The “gadget” for machines Mi1 , . . . , Miti is
described in Fig. 1.
M''i,k-1
M ik
M'ik
M''ik
M''i,k+1
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
clause machine
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
- clause job
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
- assignment job JikA
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
- blocking job
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
Theorem 5 The mixed shop scheduling problem
h(J + O) | pij ∈ {1, 2}, ν ≤ 2 | Cmax ≤ 3 i, i.e., the
problem of deciding whether a given instance of the
mixed shop problem with at most two operations
per job and processing times 1 or 2 has a schedule
of length at most 3, is NP-complete.
B
Jik
- consistency job JikC
Proof The “gadget” for machines Mi1 , . . . , Miti is
described in Fig. 2.
C
- consistency job Ji,k-1
Fig. 1 The machine block in the gadget of Theorem 4 corresponding to xik
M''i,k-1
For each occurrence xik of variable xi we use,
beside the machine Mik and the clause job, two
0
00
auxiliary machines Mik
and Mik
and tree auxB
iliary jobs: a job-shop-type blocking job Jik
consisting of three operations that must be processed
0
0
on machines Mik
, Mik , Mik
in this order; a jobC
shop-type consistency job Jik
whose two opera00
00
tions must be processed on machines Mik
, Mi,k+1
00
in a cyclic manner (i.e., machine Mi,t
coincides
i +1
00
with Mi1 ); and an open-shop-type assignment job
A
Jik
consisting of three operations that must be pro0
00
cessed on machines Mik , Mik
, Mik
in an arbitrary
order.
Since the interval [1, 2] is occupied on Mik by
B
job Jik
, it leaves two variants for the assignment
A
job Jik to be processed on that machine: either in
[0, 1] or in [2, 3]. If it is the second variant (like in
A
Fig. 1), then job Jik
occupies the interval [0, 1] on
00
C
machine Mik , which leaves to job Jik
the only pos00
sibility to be processed: starting on machine Mik
in the interval [1, 2], it has to finish on machine
00
Mi,k+1
in [2, 3]. This, in turn, leaves the only possiA
bility for the assignment job Ji,k+1
to be processed
on that machine: only in the interval [0, 1], thus repeating the schedule configuration of the previous
A
assignment job Jik
.
Thus, cyclically rounding the machine blocks
corresponding to occurrences xik of variable xi in
the increasing order of their indices, we establish
the identity of schedule configurations of those blocks.
Alternatively, in the case when the assignment job
A
Jik
chooses its first variant, we again establish the
identity of schedule configurations, but this time
by rounding the machine blocks in the opposite
12
Mik
M''ik
M''i,k+1
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxx
xxxxxxx
xxxxxxx
xxxxxxx
xxxxxxx
xxxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
clause machine
- clause job
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
- assignment job
JikA
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
- consistency jobs
JikC
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
- consistency jobs
C
Ji,k-1
Fig. 2 The machine block in the gadget of Theorem 5 corresponding to xik
Here for each occurrence xik of variable xi , we
define, beside the machine Mik and the clause job,
00
one auxiliary machine Mik
and two auxiliary jobs:
C
a job-shop-type consistency job Jik
consisting of
two unit-length operations that must be processed
00
00
on machines Mik
, Mi,k+1
in a cyclic manner (i.e.,
00
00
); and an openmachine Mi,ti +1 coincides with Mi1
A
shop-type assignment job Jik consisting of two operations (of length 2 and 1) that must be respec00
in an
tively processed on machines Mik and Mik
arbitrary order.
There is no need to present here the proof for
the “synchronization” property of the garget, since
it is absolutely similar to that presented for Theorem 4. u
t
5 Complexity Results for Short Scheduling
of Job Shops
In this section we present a few NP-completeness
results for the job shop problem with a constant
bound on schedule length.
The following results were previously known.
has both negated and unnegated occurrences in
formula F (otherwise such a variable can be eliminated together with the corresponding clauses).
Assume that variable xi has ti occurrences in
formula F denoted as xi1 , . . . , xi ti , and that all
unnegated literals (xij = xi ) receive the numbers
1 to ui , while negated ones (xij = x̄i ) receive the
numbers ui + 1 to ti .
Pk
Let N = i=1 ti = 3m denote the total number of occurrences in formula F . We define the corresponding instance I of the hJ | pij ∈ {1, 2}, ν =
2 | Cmax ≤ 4 i problem consisting of 3N + 4k + m
machines and 4N + 4k jobs, each consisting of two
operations: J = (X1 (y1 ), X2 (y2 )), where Xi denotes the machine processing the i-th operation,
and yi denotes the length of that operation.
For each variable xi we specify a machine block
Mi consisting of
Theorem 6 (Williamson et al. [40]) The job
shop problem hJ | pij = 1, ν ≤ 3 | Cmax ≤ 4 i, i.e.,
the problem of deciding whether a given instance
of a job shop with at most three operations per job
and unit processing times has a schedule of length
at most 4, is NP-complete.
The matching positive result is obtained by a
reduction to the well-known 2SAT problem.
Theorem 7 (Williamson et al. [40]) The decision problem hJ || Cmax ≤ 3 i is polynomially solvable.
Although Theorem 7 does not provide an answer to the question on the complexity of similar
decision problems hJ || Cmax ≤ C i with C = 1 or
2 (which are not subproblems of the problem with
C = 3), we can easily design polynomial time procedures for solving these decision problems by implementing the algorithm of Theorem 1 (and by a
preliminary elimination of the operations of length
0 and 2). Thus, we can obtain the following
– ui + 1 A-machines Aij (j = 0, . . . , ui ) and ui
B-machines Bji (j = 1, . . . , ui ) corresponding
to unnegated literals of variable xi ;
– (ti − ui + 1) “negated” Ā-machines Āij (j =
ui , . . . , ti ) and (ti − ui ) “negated” B̄-machines
B̄ji (j = ui +1, . . . , ti ) corresponding to negated
literals of variable xi ;
– ti machines Eji (j = 1, . . . , ti ) corresponding to
literals xij ;
– two synchronizing machines D1i and D2i for synchronizing the schedules of negated and unnegated machines of block Mi .
Corollary 1 The decision problem hJ | C ≤ 3 |
Cmax ≤ C i is polynomially solvable. u
t
Theorems 1, 6 and 7 raise a natural question.
What is the complexity status of the job shop
scheduling problem with at most two operations
per job and non-unit processing times?
Besides, we introduce m clause machines Cν
(ν = 1, . . . , m) corresponding to clauses Cν (ν =
1, . . . , m).
For each literal xij we define 4 jobs, each consisting of two operations:
1
2
Jij
= (Ãij−1 (2), B̃ji (1)), Jij
= (Ãij (1), B̃ji (1)),
i
i
4
3
Jij = (Ej (1), B̃j (1)), Jij = (Eji (1), Cν(i,j) (1)),
where à = A, B̃ = B for unnegated literal xij = xi
and à = Ā, B̃ = B̄ for negated literal xij = x̄i ;
here ν(i, j) denotes the index of the clause containing the literal xij .
Finally, for each variable xi we define 4 synchronizing jobs: (Ai0 (1), D1i (1)), (Āiui (1), D1i (1)),
(Aiui (2), D2i (1)), (Āiti (2), D2i (1)).
Suppose that for so defined instance I of the job
shop problem there exists a schedule S of length 4.
Let us show that there exists an assignment of values to variables x1 , . . . , xk such that each clause
Cν (ν = 1, . . . , m) receives the truth value.
The assignment of values will be fulfilled in
three stages. At the first stage we assign the “truth”
value to some literals. It will be shown that the
Theorem 8 The decision problem hJ | pij ∈ {1, 2},
ν = 2 | Cmax ≤ 4 i, i.e., the problem of deciding
whether a given instance of the job shop problem
with two operations per job and processing times 1
or 2 has a schedule of length 4, is NP-complete.
Proof First we define the classical NP-complete
problem 3SAT [11]. In this problem we are given
a set of boolean variables x1 , . . . , xk and a set of
clauses C1 , . . . , Cm . Each clause consists of three
literals. Each literal is either a variable xi or its
negation x̄i . The goal is to find a “truth” assignment to variables xi such that each clause contains
at least one “truth” literal.
We construct a reduction from 3SAT to our
job shop problem. It will be shown that a 3SAT
instance F (that will be referred to as formula F )
is satisfiable if and only if the corresponding job
shop instance I has a schedule of length 4.
Given a formula F , we assume that each clause
consists of exactly three literals (otherwise we can
duplicate some of its literals) and each variable
13
assignment does not produce a contradiction, i.e.,
the situation when two opposite literals (an unnegated literal and a negated one) of the same variable receive the “truth” value. At the second stage
we assign the “truth” value to those variables that
have some of its unnegated literals assigned the
“truth” value, and we assign the “false” value to
those variables that have some of its negated literals assigned the “truth” value. At the third stage,
we assign arbitrary values to the remaining variables. It is clear that only the first stage needs a
detailed description, which follows.
We start the analysis of schedule S from clause
machines Cν . Clearly, each machine Cν processes
its three unit length operations in the time interval [1, 4], and one of those operations has to be
processed in the interval [1, 2]. Given a clause Cν 0 ,
let xij be the literal whose operation Cν(i,j) (1) is
processed in the time interval [1, 2] on the corresponding clause machine Cν 0 (ν 0 = ν(i, j)). We
assign the “truth” value to the literal xij .
Thus, in each clause there is a literal which
receives the “truth” value. It remains to show that
such an assignment produces no contradiction, i.e.,
two opposite literals of the same variable xi cannot
be assigned the “truth” value.
Suppose to the contrary that an unnegated literal xij 0 = xi and a negated literal xij 00 = x̄i receive the “truth” value. Consider the schedule of
the “left” part of block Mi (corresponding to unnegated literals of variable xi according to Fig. 3).
Since we know that the second operation of job
4
i
Jij
0 = (Ej 0 (1), Cν(i,j 0 ) (1)) is scheduled in the interval [1, 2], we may conclude that its first operation
Eji 0 (1) takes the interval [0, 1]. This implies that
3
i
i
the first operation of job Jij
0 = (Ej 0 (1), Bj 0 (1))
starts at time 1 or later and finishes its processing
not earlier than at time 2. Therefore, its second
operation Bji 0 (1) can only be processed within the
time interval [2, 4] on machine Bji 0 . The same is
1
i
true for the second operation of job Jij
0 = (Aj 0 −1 (2),
i
Bj 0 (1)) since the length of the first operation is 2.
This implies that the second operations of jobs
1
3
Jij
0 and Jij 0 occupy the whole interval [2, 4] on
machine Bji 0 . Thus, the second operation of job
2
i
i
Jij
0 = (Aj 0 (1), Bj 0 (1)) can only be processed in
the unique feasible time slot on machine Bji 0 , that
is, in the time interval [1, 2], whereas the first operation of this job has to be scheduled on machine
Aij 0 in the time interval [0, 1].
Another operation on this machine has length 2
and is completed exactly at time 3. It belongs to
1
0
either job Ji,j
0 +1 (in case that j < ui ) or the syn14
xxxxxxxxxxx
xxxxxxxxxxx Clause machine C ν(i1,j1)
xxxxxxxxxxx
xxxxxxxxxxx
i
i
E j11 E ji22 E j33
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
i
A0
xxxxxx
xxxxxx
xxxxxx
xxxxxx
B1
C ν(i,j)
xxxxxx
xxxxxxxxx
xxxxxx
xxxxxxxxx
xxxxxx
xxxxxxxxx
xxxxxx
xxxxxxxxx
i
Ej
xxxxxxxxxxxx
xxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxx
xxxxxx
xxxxxx
A j-1 xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
A ij
C ν(i,p(i)+1)
i
A p(i)
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
i
B ij
i
D1
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
i
B j-1
i
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxx
xxxx
xxxx
xxxx
xxxxx
xxxxx
xxxxx
xxxxx
xxxxx
xxxxx
xxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxxxxxx
xxxxxx
i
xxxxxxxxxx
xxxxxx B p(i)+1
xxxxxxxxxx
xxxxxx
xxxxxx
xxxxxxxxxxxx
i
xxxxxx
xxxxxxxxxxxx
A p(i)+1
xxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
i
E p(i)+1
xxxxx
xxxxx
xxxxx
xxxxx
xxxxx
xxxxx
xxxxx
xxxxxx
xxxxxx
xxxxxx
B ij+1
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
A ip(i)xxxxxx
xxxxxx
xxxxxx
xxxxxxxxxxxx
xxxxxx
xxxxxxxxxxxx
xxxxxx
xxxxxxxxxxxx
xxxxxxxxxxxx
xxxxxxx i
xxxxxxx D 2
xxxxxxx
xxxxxxx
i
A n(i)
Fig. 3 Machine block Mi and a clause machine
chronizing job (Aiui (2), D2i (1)) (in case j 0 = ui ). In
1
the first case, the second operation of job Ji,j
0 +1
has to be processed in the time interval [3, 4]. This
2
implies that the second operation of job Ji,j
0 +1 =
i
i
(Aj 0 +1 (1), Bj 0 +1 (1)) must be processed in somewhere in the time interval [1, 3]. Therefore, its first
operation cannot be processed on machine Aij 0 +1
after the operation Aij 0 +1 (2). Thus, it should be
processed first in the time interval [0, 1], while the
operation Aij 0 +1 (2) should be processed after in the
time interval [1, 3], and this property is passed over
to all subsequent Ai -machines, till the last machine
Aiui . Thus, the second operation of the synchronizing job (Aiui (2), D2i (1)) has to be scheduled on
machine D2i in the only possible time interval [3, 4].
The same conclusion follows from the assumption that a negated literal xij 00 = x̄i received the
“truth” value. But machine D2i is able to process
only one operation in the time interval [3, 4], which
means that both assumptions cannot be true simultaneously. Thus, we proved that no contradiction can arise at the first stage of our value assignment procedure. We obtained that our procedure
provides the desired assignment to variables {xi }
at which all clauses receive the “truth” value.
It should be noted here that the construction
of our blocks Mi is somewhat redundant. This is
done for the sake of simplicity and more rigidity
of schedule S. Indeed, it can be shown that schedule S has the following rigid property. In case that
an unnegated literal xij = xi receives the “truth”
value, at the first stage all Aij (1)-operations (j =
0, . . . , ui ) have to be processed on the corresponding A-machines prior to all Aij (2)-operations, while
all Āij (1)-operations (j = ui , . . . , ti ) should be processed after all Āij (2)-operations. In the opposite
case that a negated literal xij = x̄i receives the
“truth” value, all Aij (1)-operations have to be processed after all Aij (2)-operations, whereas all Āij (1)operations have to be processed prior to all Āij (2)operations. In other words, at the second stage we
can assign to variable xi the boolean value:
[2, 4], which completes the construction of the desired schedule of length 4. Thus, we proved that a
schedule of length 4 for so constructed instance I
exists if and only if there exists an assignment for
variables of formula F providing the “truth” value
for each clause Ci . Theorem 8 is proved. u
t
6 Complexity Results for Short Scheduling
of Open Shops
Tight complexity analysis of the open shop problem with respect to the single parameter, an upper bound on schedule length, was performed in
the paper by Williamson et al. [40]. In this section
we extend their positive result in Corollary 2 and
strengthen their negative result in Theorem 11.
xi := “all Aij (1)-operations precede all
Āij (1)-operations”
Now let us prove the reverse statement. Suppose that there exists an assignment of values to
variables x1 , . . . , xk providing the “truth” value to
each clause Cν (ν = 1, . . . , m). We prove that for
the instance I there exists a schedule S of length 4.
For each variable xi we first organize a schedule of length 4 for the operations of block Mi . Let
us first consider the operations related to those
literals of this variable which received the “false”
value. For instance, let they be unnegated literals xij = xi . Then we sequence the corresponding Aij (1)-operations on each A-machine of block
Mi after the Aij (2)-operations, while on the Āmachines the order of these operations is reverse:
first we process Āij (1)-operations and after that
we process the Āij (2)-operations. Then each Bmachine in the left part of block Mi will be busy
in the interval [2, 4], and so, we have to schedule
3
the first operation of each job Jij
in the interval [0, 1], while retaining the interval [1, 2] to the
4
first operation of job Jij
. Thus, the second opera3
tion of “false” job Jij (related to the false literal
xij ) can only be scheduled on the corresponding
clause machine in the time interval [2, 4]. Since
there are at most two false literals per clause we
have enough capacity in the interval [2, 4] to process corresponding second operations.
On each B̄-machine in the right part of block
Mi (currently containing “truth” jobs and opera2
tions) the jobs are sequenced in the order: Jij
→
3
1
Jij → Jij . This provides the possibility to sched3
ule the first operation of job Jij
in the interval
[1, 2], while retaining the interval [0, 1] on machine
4
Eji for the first operation of job Jij
. So, its second (“truth”) operation comes to the corresponding clause machine at time 1 and can be easily
scheduled in the interval [1, 4].
It is also easily seen how to schedule the operations on machines D1i and D2i in the interval
Theorem 9 (Williamson et al. [40]) The decision problem hO | pij ∈ {1, 2}, ν ≤ 3 | Cmax ≤ 4 i,
i.e., the problem of deciding whether a given instance of the open shop problem with at most three
operations per job and processing times 1 or 2 has
a schedule of length at most 4, is NP-complete.
The corresponding positive result is obtained
by using an algorithm for weighted bipartite matching.
Theorem 10 (Williamson et al. [40]) The decision problem hO || Cmax ≤ 3 i is polynomially solvable.
Although Theorem 10 does not directly provide
an answer to the question on the complexities of
similar decision problems hO || Cmax ≤ C i with
C = 1 and C = 2, the polynomial time algorithm
from [40] can be easily adopted to these cases, too.
Furthermore, the algorithm successfully provides a
(positive or negative) answer for the more general
b (just because the bipartite
open shop problem O
edge coloring algorithm that the algorithm from
[40] uses for unit-length operations works equally
successfully both for graphs and multi-graphs).
Thus, we can derive the following
b|C ≤ 3|
Corollary 2 The decision problem hO
Cmax ≤ C i is polynomially solvable. t
u
The following theorem is a refinement of the
above negative result (Theorem 9) to a more restrictive set of instances with at most two operations per job.
Theorem 11 The open shop problem hO | pij ∈
{1, 2}, ν ≤ 2, µ ≤ 3 | Cmax ≤ 4 i, i.e., the problem
15
of deciding if a given instance of an open shop with
at most two operations per job, at most three operations per machine, and processing times 1 or 2
has a schedule of length at most 4, is NP-complete.
1
Mi1
Pij
Qij
Aij
Bij
Machine
1
Mij
Cν(i,j)
2
Mi,j−1
3
Mij
Length
2
1
2
1
Operation
Cij
Dij
Eij
Fij
Machine
3
Mij
1
Mij
2
Mij
3
Mij
1
2
2
2
Length
Pi1
A i2
E i1
(a) Assignment block
for the 1st
appearance (x i1)
of variable xi
Clause machines
2
Mi,j-1 A ij
C1
1
D ij
Mij
2
A i,j+1
3
Mij
F ij
Mij
P ij
E ij
Qij
Cij Bij
C ν(i,j)
Cm
(b) Assignment block for literal x ij(j>1)
Proof Again, we reduce the MONOTONE-NOTALL-EQUAL-3SAT to our problem. Suppose, we
are given an instance F of that problem represented by a set of clauses {C1 , . . . , Cm }. It will
be referred to as “the formula”. W.l.o.g we may
assume that each clause consists of exactly three
literals. Otherwise, if a clause consists of only two
literals, we can add a copy of one of those two literals. Let xij be the j-th occurrence of variable xi
in the formula F . Now we construct an instance
I of hO | pij ∈ {1, 2}, ν ≤ 2, µ ≤ 3 | Cmax ≤ 4 i as
follows.
For each clause Cν we define a clause machine
Cν . With each occurrence xij of variable xi we
associate a clause job with operations (Pij , Qij ),
and an assignment block ABij with additional machines and jobs that controls the assignment to the
literal xij .
For the first occurrence xi1 of variable xi block
1
2
ABi1 consists of two machines Mi1
and Mi1
and
one job (Di1 , Ei1 ) (see Fig. 4(a)). For each of the
subsequent occurrences xij (j > 1) block ABij
1
2
3
consists of three machines Mij
, Mij
, Mij
and three
jobs (Aij , Bij ), (Cij , Dij ), (Eij , Fij ) (see Fig. 4(b)).
The length of each operation and the processing
machine are specified in Table 1.
Operation
D i1
...
2
Mi1
Fig. 4 Assignment blocks and clause machines
Suppose that there exists a schedule of length 4
for the instance I. Assign to xij the value:
xij = “Qij is in the first half of the makespan”(2)
It can be easily seen from Fig. 4 that the assignment blocks guarantee synchronized positions
for all Pij -operations corresponding to variable xi .
Indeed, if Pi1 is processed in the second half of the
makespan (as in Fig. 4), then Ai2 (if there is a second occurrence of xi ) has to be processed in the
interval [0, 2] (in the same, 1-st assignment block
of variable xi ). This forces the operations Bi2 and
Ci2 to be processed in the second half of the interval [0, 4]. So, the operations Di2 and Fi2 have to
be scheduled in the interval [0, 2], which forces the
operations Pi2 , Ei2 to be scheduled in the interval
[2, 4]. Again, Ai3 (if any) has to be scheduled in
the interval [0, 2], and so forth. Thus, all literals
xij of the same variable xi receive the same value
which thereby can be assigned to variable xi .
Since three operations Qij corresponding to
three literals of the same clause cannot be placed
in the same half of the makespan, this implies the
NOT-ALL-EQUAL property for each clause.
The inverse statement is proved automatically.
Suppose that there exists a desirable assignment
for the variables xi of formula F satisfying the
NOT-ALL-EQUAL property. Place the Qij -operations according to (2) and the values (“truth” or
“false”) of the corresponding literals xij . The location of the Qij -operations predetermines the location of all other operations in the assignment
blocks and on the clause machines (to a transposition of the neighboring operations Bij and Cij and
a transposition of the neighboring Q-operations located in the same half of the makespan on the same
clause machine, which is immaterial). Theorem 11
is proved. t
u
Table 1 Operations and their parameters
Edges in Fig. 4 connect operations of the same
job. Dashed block designates the vacant place for
the A-operation of the next occurrence of variable
xi (if any).
Obviously, the input length of the instance I is
bounded above by a polynomial of the input length
of formula F . We now show that for the instance
I there exists a schedule of length 4, if and only if
for the formula F there exists a “truth” assignment
satisfying the property NOT-ALL-EQUAL.
7 Multi-parametric complexity analysis
In this section we give a short introduction to the
multi-parametric complexity analysis of discrete
problems and give some basic notions.
16
Normally, each discrete problem can be described in terms of many parameters, and the boundary separating easy and hard cases can be drawn
between some “boundary values” of those parameters. One of such parameters is normally treated
as the key parameter with respect to which we
perform our complexity analysis of the problem
under consideration. In one case this may be the
number of machines, in another case this is an upper bound on the number of operations per job,
in a third case this is an upper bound on schedule length, etc. Imposing constraints on the key
parameter, we thereby define a subproblem of the
original problem.
ever, the complexity analysis of the problem with
respect to each particular parameter still cannot
provide us the whole picture of the problem complexity. Much more informative is investigating the
problem complexity with respect to various combinations of constraints simultaneously imposed
on several key parameters. Such a multi-parametric
complexity analysis represents much more difficulties, and the very first question that arises here
is the question of completeness of the analysis.
The question becomes nontrivial when the number of jointly investigated key parameters becomes
greater than three. In this case the notion of a basis
system of subproblems relieves a lot.
In our paper we consider the most simple and
natural type of constraints, when an upper bound
x̄ on the admissible values of a key parameter x is
specified. Such a bound is called a delimiter. The
subproblem Px0 corresponding to a given value x0
of x̄ consists of all instances with values of x ≤ x0 .
All possible values of x̄ define a family of subproblems {Px̄ | x̄ ∈ X̄}.
This notion was first introduced explicitly in
[34], although similar notions (like a system of basis classes of inputs or a system of basis classes of
individual problems) were used earlier in [21] and
[20]. Suppose that n key parameters (x1 , . . . , xn )
are chosen for the complexity analysis of a given
problem P. Then χ(I) = (x1 (I), . . . , xn (I)) will be
called a characteristic vector of a given instance I.
Let Xi be the set of values of parameter xi , and
X̄i ⊇ Xi be an extended set of values. (It will
be explained further why we need extended sets
of values and what they mean.) We assume that
X̄1 , . . . , X̄n are partially ordered sets. Then we can
define a partial order on the set X̄ of n-dimensional
vectors x̄ = (x̄1 , . . . , x̄n ), x̄i ∈ X̄i . For two vectors
x0 = (x01 , . . . , x0n ), x00 = (x001 , . . . , x00n ) ∈ X̄ we write
x0 ≤ x00 , if x0i ≤ x00i for all i = 1, . . . , n.
Clearly, any two subproblems Px0 , Px00 defined
for two different values x0 < x00 of the delimiter
x̄ are dependent, namely, Px0 is a subproblem of
Px00 , since each problem instance included in Px0 is
also included in Px00 . Sometimes a special case of a
problem can be encoded more efficiently than the
general one. As a result, we may run into a paradoxical situation when a “subproblem of a polynomial time solvable problem is NP-hard”. To avoid
such situations, we accept the agreement that every instance of a problem P uses the same encoding scheme within any subproblem of P (including problem P itself). This agreement provides the property that a subproblem can never be
harder than a super-problem (from the computational complexity point of view). As a consequence,
for any value x0 of the delimiter x̄ the polynomial solvability of the subproblem Px0 implies the
polynomial solvability of any subproblem Px00 with
x00 ≤ x0 , while the N P -completeness of Px0 implies
the N P -completeness of any subproblem Px000 with
x000 ≥ x0 . If we are lucky to discover a “boundary
value” x0 of x̄ such that for all x00 < x0 the subproblems Px00 are polynomially solvable, while for
all x00 ≥ x0 they are N P -complete, we thereby have
the dichotomy property for that (may be, infinite)
parameterized family of subproblems.
Every vector x̄ ∈ X̄ defines a subproblem Px̄ =
{I ∈ P | χ(I) ≤ x̄} of problem P and is called a
vector-delimiter of problem Px̄ . Thus, we have a
class of subproblems P(X̄ ) = {Px̄ | x̄ ∈ X̄ } over
all possible values of the vector-delimiter, and we
would like to establish the complexity of each subproblem in this class.
Let us explain here why we need extended sets
of values for delimiters of some parameters. In the
case of a numerical parameter xi (e.g., xi is the
number of jobs in a given instance) we may permit
only finite values of it (since we cannot consider
problem instances with infinite input size). Meanwhile, the infinite value of the delimiter x̄i is sensible, because it enables us to consider subproblems
containing instances with arbitrarily large values
of parameter xi . In this case we extend the set of
values of the delimiter x̄i by the infinite value “∞”.
As we already mentioned, each discrete problem normally depends on lots of parameters, and
each of them can be taken for the key parameter
in the complexity analysis of the problem. How-
Let PP (X̄ ) and PN P (X̄ ) denote the subclasses
of class P(X̄ ) consisting of all polynomially solvable and all N P -complete subproblems respectively,
and let X̄P = {x̄ ∈ X̄ | Px̄ ∈ PP (X̄ )} and X̄N P =
17
{x̄ ∈ X̄ | Px̄ ∈ PN P (X̄ )} denote the sets of their
vector-delimiters. When the equality P(X̄ ) =
PP (X̄ ) ∪ PN P (X̄ ) holds, we say that class P(X̄ )
of subproblems possesses the dichotomy property.
case of complexity analysis with respect to a single numerical parameter x that may take arbitrarily large values. It may happen that for any
finite value x0 of the delimiter x̄ the corresponding subproblem Px0 is polynomially solvable, while
the subproblem P∞ is NP-complete. Then the set
X̄Pmax of maximal elements of the set X̄P is empty
and cannot majorize X̄P . (In the case of multiparametric analysis the proof of this fact is more
sophisticated, but uses the same idea.) So, the pair
(X̄Pmax , X̄Nmin
P ) does not constitute a fully representative system of vectors (property (c) does not
hold), and by Lemma 2, there is no basis system
of subproblems. At the same time, there exists a
fully representative system of vectors in the set X̄ .
(As a consequence, the dichotomy property holds.)
In the current paper we establish the existence
of a finite basis system for the class of subproblems
b deof the mixed shop scheduling problem (J + O)
fined by simultaneous constraints on the parameters: M, pij , ν, C.
Definition 3 We say that a couple of sets
(X 0 , X 00 ) with X 0 , X 00 ⊆ X̄ is a fully representative system of vectors in X̄ , if
(a) for any vector x̄ ∈ X 0 problem Px̄ is polynomially solvable;
(b) for any vector x̄ ∈ X 00 problem Px̄ is N P complete;
(c) any vector x̄ ∈ X̄ is either majorized by X 0
or minorized by X 00 (the latter means that x̄
majorizes some vector from X 00 ).
The corresponding couple of sets of subproblems
(P(X 0 ), P(X 00 )) is called a fully representative system of subproblems in the class P(X̄ ).
It can be seen that if in a fully representative system (X 0 , X 00 ) we have two comparable vectors either in X 0 or in X 00 , then the lesser one
can be removed from X 0 in the first case and the
larger one — from X 00 in the second case. In both
cases the system of vectors remains fully representative. Ideally, to perform the verification of property (c) most efficiently, we are interested in finding
a somewhat minimal fully representative system of
vectors, in which no two vectors in X 0 (as well as
no two vectors in X 00 ) are comparable. If a fully
representative system of vectors with this “incomparability” property exists, it coincides with the
couple of sets (X̄Pmax , X̄Nmin
P ) consisting of all maximal vectors in X̄P and all minimal vectors in X̄N P .
In this case the corresponding fully representative
system of subproblems is called a basis system of
subproblems.
From the above definitions we immediately have
8 Complete 4-parametric complexity
analysis of the mixed shop problem
As was said above, for the multi-parametric complexity analysis we choose the following key parameters: the type of the model (M), the maximum processing time of an operation (pmax ), the
maximum number of operations per job (ν), and
the upper bound on schedule length (C); χ(I) =
(M, pmax , ν, C) stands for the characteristic vector
of a given problem instance I. The set X̄ of possible values of the vector-delimiter x̄ = (M, p̄, ν̄, C̄)
is defined as X̄ = M × N̄ × N̄ 00 × N̄ 00 , where M =
b J, (J + O), (J + O)},
b N̄ = {0, 1, . . . } ∪ {∞},
{O, O,
and N̄ 00 = N̄ \ {0, 1}.
We consider the infinite class of subproblems
P(X̄ ) = {Px̄ | x̄ ∈ X̄ } of the general mixed shop
b where each subproblem Px̄ is
problem (J + O),
defined by its set of instances: Px̄ = {I | χ(I) ≤ x̄}.
For the purposes of our analysis we focus on ten
subproblems from the class P(X̄ ) whose vectordelimiters are listed in Table 2.
Lemma 2 For a parameterized class of problems
P(X̄ ) a basis system of subproblems exists if and
only if the couple of sets (X̄Pmax , X̄Nmin
P ) represents
a fully representative system of vectors in X̄ . u
t
An example of a class of problems P(X̄ ) having no basis system of subproblems was presented
in [20], where it was shown that for the class of
subproblems of the open shop problem defined by
all combinations of constraints on the key parameters (n, ν, m, µ) (the number of jobs, the maximum number of operations per job, the number
of machines, the maximum number of operations
per machine), the set X̄Pmax does not majorize X̄P .
Such a situation can be easily illustrated in the
Theorem 12 Ten problems defined by the vectordelimiters listed in Table 2 constitute a basis system of subproblems in class P(X̄ ).
Proof The complexity status of all ten basis subproblems is confirmed in the corresponding theorems (see the Third column of Table 2). The incomparability of any two vector-delimiters defining
18
No.
x̄1
x̄2
x̄3
x̄4
x̄5
x̄6
x̄7
x̄8
x̄9
x̄10
Problem Px̄i ,
x̄i = (M, p̄, ν̄, C̄)
b 1, 2, ∞)
((J + O),
b ∞, ∞, 2)
((J + O),
Complexity
References
(J, ∞, ∞, 3)
b ∞, ∞, 3)
(O,
b 1, ∞, ∞)
(O,
P
P
P
P
P
Theorem 2
Theorem 3
Corollary 1
Corollary 2
Gonzalez and
Sahni [13]
((J + O), 1, 3, 3)
((J + O), 2, 2, 3)
(O, 2, 2, 4)
(J, 2, 2, 4)
(J, 1, 3, 4)
NP-compl.
NP-compl.
NP-compl.
NP-compl.
NP-compl.
Theorem 4
Theorem 5
Theorem 11
Theorem 8
Williamson
et al. [40]
a constant upper bounds on schedule length are
considered. It can be easily seen that the positive
answer for these decision problems is possible for
those instances only that have only jobs from a
very restrictive set of types (characterized by a limited number of non-zero operations and restricted
processing times of operations). The existence (in
a given instance) of jobs of other types can be established by the direct looking through the input,
which immediately gives the negative answer. In
the “positive” case of this verification (when we
come to the conclusion that there are no “infeasible” types of jobs), and after the elimination of all
jobs having no positive-length operations, it can
be seen that there can be at most a constant number of jobs of each type. Therefore, the “compact”
encoding is equivalent (by the size of the input) to
the “ordinary” encoding scheme, where each job
is encoded individually. That is why the complexity results for such problems are equivalent under
both encoding schemes. (This provides polynomial
solvability of problems Px̄i , i = 2, 3, 4, under the
“compact” encoding scheme.)
Finally, to ascertain in the polynomial solvability of problem Px̄5 , we can represent its (unit
length) operations by edges in an m × n bipartite multi-graph G (where m and n denote the
number of machines and the number of jobs) and
then apply, for instance, the algorithm by Cole,
Ost, and Schirra [6], providing an optimal solution of the corresponding edge-coloring problem in
O(M log D) time, where M and D denote the number of edges and the maximum vertex degree in G.
This provides a polynomial solvability of our problem in O(|I|oe ·log |I|oe ) time under the “ordinary”
encoding (where |I|oe denotes the input size in that
encoding).
The same problem under the “compact” encoding can be solved in O(min{m, n}|I|2ce ) time
by applying the ideas of Gonzalez and Sahni [13]
and Gonzalez [12] (where |I|ce denotes the input
size in this encoding).
As far as N P -completeness results is concerned,
the problems Px̄i (i = 6, . . . , 10) whose strong N P completeness was proved under the “ordinary” encoding scheme, cannot be “easier” for more compact encoding of the input data (in particular, for
our “compact” encoding scheme).
Thus, due to Theorem 12, we have the following
Table 2 The basis system of subproblems of class P(X̄ )
polynomially solvable problems (as well as the incomparability of any two vector-delimiters defining
N P -complete problems) can be directly checked.
Thus, it only remains to show that two sets of vectors — X 0 (the first five vectors in Table 2) and X 00
(the last five vectors) constitute a fully representative system of vectors in X̄ . To that end, we should
confirm that every vector x̄ = (M, p̄, ν̄, C̄) ∈ X̄ is
either majorized by X 0 or minorized by X 00 .
If (p̄ ≤ 1)& (ν̄ = 2) then vector x̄ is majorized
by vector x̄1 . So, we further assume that either
p̄ ≥ 2 or ν̄ ≥ 3.
Any vector x̄ with C̄ = 2 is majorized by vector x̄2 . So, we further consider only cases C̄ ≥ 3.
b vector x̄
Case C̄ = 3. If M = J or M ≤ O,
is majorized by either vector x̄3 or vector x̄4 . Let
b
M ∈ {(J + O), (J + O)}.
Then in the case that
p̄ ≥ 2 vector x̄ majorizes vector x̄7 , while in the
case that ν̄ ≥ 3 vector x̄ majorizes vector x̄6 .
Case C̄ ≥ 4. In the case that p̄ ≥ 2 vectors x̄
with M ≥ O majorize vector x̄8 , while the vectors
x̄ with M = J majorize vector x̄9 . Thus, it only
remains to consider the case (p̄ = 1)&(ν̄ ≥ 3).
In this case every vector x̄ with M ≥ J majorizes vector x̄10 , while every vector x̄ with M ≤
b is majorized by vector x̄5 . u
O
t
Although the complexities of ten basis problems were established under the “ordinary” encoding of the input data, it can be easily shown that
we have the same complexity results for these ten
problems under the “compact” encoding scheme,
as well.
Indeed, Theorem 2 was proved for both encoding schemes.
In Theorem 3, as well as in Theorems 7 and 10
due to Williamson et. al. [40], the problems with
Theorem 13 Each problem from the infinite class
P(X̄ ) has the same complexity under both encoding
schemes: the “ordinary” and the “compact” one.
To establish the complexity of problem Px̄ (x ∈ X̄ ),
19
it suffices to compare its vector-delimiter x̄ with
ten vectors-delimiters of basis problems presented
in Table 2. u
t
9 Conclusion
In this paper we provided a complete complexity
classification of the decision problems for job shop,
open shop and mixed shop scheduling models with
respect to all possible combinations of constraints
on the chosen problem parameters, such as the
maximum number of operations per job, the maximum processing time of an operation, and the upper bound on schedule length. We established that
this class of problems has a basis system consisting
of ten subproblems, five of which are polynomially
solvable and another five are NP-complete.
The natural question is to extend our classification to additional problem parameters, such as
the maximum number of operations per machine,
the number of machines, and the number of jobs.
It would be also interesting to perform a similar complexity analysis of the preemptive shop
scheduling problems. The most challenging is comprehending the complexity of the preemptive mixed
shop scheduling problem, where there are known
instances [2] having no optimal schedules with integral preemptions only.
10 Acknowledgments
The research was supported by the Russian Foundation for Basic Research (grants nos. 08-01-00370
and 08-06-92000-HHC-a) and by the Federal Target Grant “Scientific and educational personnel
of innovation Russia” for 2009-2013 (government
contract no. 02.740.11.0429).
References
1. Bansal, N., Mahdian, M., and Sviridenko, M. (2005).
Minimizing makespan in no-wait job shops. Mathematics of Operations Research, 30 (4), 817–831.
2. Baptiste, Ph., Carlier, J., Kononov, A., Queyranne,
M., Sevastyanov, S., & Sviridenko, M. Integrality Property in Preemptive Shop Scheduling. Discrete Applied
Mathematics, to appear.
3. Brucker, P., & Knust, S. (2000). Operations research:
Complexity results of scheduling problems, http://www.
mathematik.uni-osnabrueck.de/research/OR/class/.
4. Carlier, J., & Pinson, E. (1989). An algorithm for solving the job-shop problem. Management Science, 35 (2),
164–176.
20
5. Chen, B., Potts, C., & Woeginger, G. (1998). A review
of machine scheduling: complexity, algorithms and approximability. In: Handbook of combinatorial optimization, Vol. 3. (pp. 21–169) Boston, MA: Kluwer Acad.
Publ.
6. Cole, R., Ost, K., & Schirra, S. (2001). Edge-coloring
bipartite multigraphs in O(E log D) time. Combinatorica, 21 (1), 5–12.
7. Creignou, N., Khanna, S., & Sudan, M. (2001). Complexity classifications of Boolean constraint satisfaction problems. SIAM Monographs on Discrete Mathematics and Applications. Philadelphia, PA: Society for
Industrial and Applied Mathematics (SIAM).
8. Drobouchevitch, I.G., & Strusevich, V.A. (1999). A
polynomial algorithm for the three-machine open shop
with a bottleneck machine. Annales of Operations Research, 92, 185–214.
9. Fisher, H., & Thompson, G.L. (1963). Probabilistic
Learning Combinations of Local Job-Shop Scheduling
Rules. In: Muth, J.F. and Thompson, G.L. (Eds.),
Industrial Scheduling (pp. 225-551) Englewood Cliffs,
N.J.: Prentice-Hall.
10. Gabow, H., & Kariv, O. (1982). Algorithms for edge coloring bipartite graphs and multigraphs. SIAM Journal
of Computing, 11, 117–129.
11. Garey, M., & Johnson, D. (1979). Computers and intractability. A guide to the theory of NP-completeness.
A Series of Books in the Mathematical Sciences., San
Francisco, CA: W.H. Freeman and Co.
12. Gonzalez, T. (1979). A note on open shop preemptive
schedules, Unit execution time shop problems. IEEE
Transactions on Computing, 28, 782–786.
13. Gonzalez, T., & Sahni, S. (1976). Open shop scheduling
to minimize finish time. Journal of the Association for
Computing Machinery, 23 (4), 665–679.
14. Joseph Y.-T. Leung (Ed.) (2004). Handbook of scheduling. Algorithms, models, and performance analysis.
Chapman & Hall/CRC Computer and Information Science Series. Boca Raton, FL: Chapman & Hall/CRC.
15. Hoogeveen, J., Lenstra, J.K., & Veltman, B. (1994).
Three, four, five, six, or the complexity of scheduling
with communication delays. Operations Research Letters, 16 (3), 129–137.
16. Hopcroft, J.E., & Karp, R.M. (1975). An O(n2.5 ) Algorithm for Matching in Bipartite Graphs. SIAM Journal
of Computing, 4, 225–231.
17. Jackson, J. (1956). An extension of Jhonson’s results on
job lot scheduling. Navel Research Logistics Quartely,
3 (3), 201–203.
18. Jeavons, P., Cohen, D., & Gyssens, M. (1997). Closure
properties of constraints. Journal of ACM, 44 (4), 527–
548.
19. Kashyrskikh, K.N., Kononov, A.V., Sevastianov,
S.V., & Tchernykh, I.D. (2001). Polynomially solvable
case of the 2-stage 3-machine open shop problem [in
Russian]. Diskretnyi Analiz i Issledovanie Operatsii,
Ser. 1, 8(1), 23–39.
20. Kashyrskikh, K.N., Sevastianov, S.V., & Tchernykh,
I.D. (2000). Four-parametric complexity analysis of the
open shop problem [in Russian]. Diskretnyi Analiz i
Issledovanie Operatsii, Ser. 1, 7(4), 59–77.
21. Kononov, A.V., & Sevastianov, S.V. (2000). On the
complexity of the connected list vertex-coloring problem [in Russian]. Diskretnyi Analiz i Issledovanie Operatsii, Ser. 1, 7(2), 21–46.
22. Kononov, A., Sevastianov, S., & Sviridenko, M. (2009).
Complete Complexity Classification of Short Shop
23.
24.
25.
26.
27.
28.
29.
30.
31.
32.
33.
34.
35.
36.
37.
38.
39.
Scheduling, In: A. Frid a.o. (Eds.), Computer Science
— Theory and Applications, 4th International Computer Science Symposium in Russia, CSA 2009, Novosibirsk, Russia, August 2009, Proceedings. Lecture Notes
in Computer Science, 5675, Springer-Verlag, 227–236.
König, D. (1916). Graphok és alkalmazásuk a determinánsok és a halmazok elméletére [Hungarian]. Mathematikai és Természettudományi Értesitö, 34, 104–
119. [German translation: Über Graphen und ihre Anwendung auf Determinantentheorie und Mengenlehre,
Mathematische Annalen, 77 (1916), 453-465.]
Lawler, E.L., Lenstra, J.K., Rinnooy Kan,
A.H.G., & Shmoys, D.B. (1993). Sequencing and
scheduling: algorithms and complexity. In: S. Graves,
A.H.G. Rinnooy Kan and P. Zipkin (Eds.) Handbooks
in Operations Research and Management Science,
Volume 4, Logistics of Production and Inventory (pp.
445–522). North Holland, Amsterdam: Elsevier.
Lenstra, J.K., & Rinnooy Kan, A.H.G. (1978). Complexity of scheduling under precedence constraints. Operations Research, 26 (1), 22–35.
Lenstra, J.K., Rinnooy Kan, A.H.G., & Brucker, P.
(1977). Complexity of machine scheduling problems.
Annales of Discrete Mathematics, 1, 343–362.
Lenstra, J., Shmoys, D., & Tardos, E. (1990). Approximation algorithms for scheduling unrelated parallel
machines. Mathematical Programming, Ser. A, 46 (3),
259–271.
Masuda, T., Ishii, H., & Nishida, T. (1985). The mixed
shop scheduling problem. Discrete Applied Mathematics, 11 (2), 175–186.
Melnikov, L., & Vizing, V. (1999). The edge chromatic
number of a directed/mixed multigraph. Journal of
Graph Theory, 31 (4), 267–273.
Neumytov, Ju., & Sevastianov, S. (1993). An approximation algorithm with best possible bound for the
counter routs problem with three machines [in Russian]. Upravlyaemye Sistemy, 31, 53–65.
Pyatkin, A. (1999). Incidentor Colorings and their applications [in Russian]. Ph.D. Thesis.
Schrijver, A. (2003). Combinatorial optimization. Polyhedra and efficiency. Algorithms and Combinatorics,
24B. Berlin: Springer-Verlag.
Schaefer, T.J. (1978). The Complexity of Satisfiability
Problems. STOC 1978, 216–226.
Sevastianov, S. (2005). An introduction to multiparameter complexity analysis of discrete problems.
European Journal of Operational Research, 165 (2),
387–397.
Shakhlevich, N.V., Sotskov, Yu.N., & Werner, F.
(2000). Complexity of mixed shop scheduling problems:
A survey. European Journal of Operational Research,
120, 343–351.
Timkovsky, V.G. (2003). Identical parallel machines vs.
unit-time shops and preemptions vs. chains in scheduling complexity. European Journal of Operational Research, 149, 355–376.
Vizing, V.G. (1999). On a connected graph coloring
in prescribed colors [in Russian]. Diskretnyi Analiz i
Issledovanie Operatsii, Ser. 1, 6 (4), 36–43.
Vizing, V.G. (2002). A bipartite interpretation of a directed multigraph in problems of the coloring of incidentors [in Russian]. Diskretnyi Analiz i Issledovanie
Operatsii, Ser. 1, 9 (1), 27–41.
Vizing, V.G. (2008). On the coloring of incidentors in
a partially ordered multigraph [in Russian]. Diskretnyi
Analiz i Issledovanie Operatsii, 15 (1), 17–22.
40. Williamson, D., Hall, L., Hoogeveen, J., Hurkens, C.,
Lenstra, J.K., Sevastianov, S., & Shmoys, D. (1997).
Short shop schedules. Operations Research, 45 (2), 288–
294.
21
 0
0
advertisement
Related documents
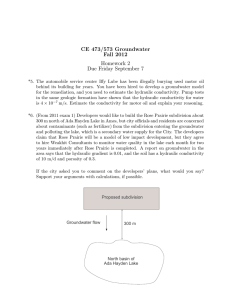


Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users