Icarus 220 (2012) 660–678
Contents lists available at SciVerse ScienceDirect
Icarus
journal homepage: www.elsevier.com/locate/icarus
Aggregates in the strength and gravity regime: Particles sizes in Saturn’s rings
Ana H.F. Guimarães a,⇑, Nicole Albers b, Frank Spahn a, Martin Seiß a, Ernesto Vieira-Neto c,
Nikolai V. Brilliantov d
a
Institut für Physik und Astronomie, Universität Potsdam, Karl-Liebknecht-Str. 24/25, Haus 28, 14476 Potsdam, Germany
Laboratory for Atmospheric and Space Physics, 1234 Innovation Drive, Boulder, CO 80303, USA
c
Grupo de Dinâmica Orbital e Planetologia, UNESP – Universidade Estadual Paulista, CEP 12516-410 Guaratinguetá, Brazil
d
Department of Mathematics, University of Leicester, Leicester LE1 7RH, UK
b
a r t i c l e
i n f o
Article history:
Received 23 December 2011
Revised 15 May 2012
Accepted 5 June 2012
Available online 15 June 2012
Keywords:
Collisional physics
Accretion
Planetary rings
Saturn, Rings
a b s t r a c t
Particles in Saturn’s main rings range in size from dust to kilometer-sized objects. Their size distribution
is thought to be a result of competing accretion and fragmentation processes. While growth is naturally
limited in tidal environments, frequent collisions among these objects may contribute to both accretion
and fragmentation. As ring particles are primarily made of water ice attractive surface forces like adhesion could significantly influence these processes, finally determining the resulting size distribution.
Here, we derive analytic expressions for the specific self-energy Q and related specific break-up energy
Qw of aggregates. These expressions can be used for any aggregate type composed of monomeric constituents. We compare these expressions to numerical experiments where we create aggregates of various
types including: regular packings like the face-centered cubic (fcc), Ballistic Particle Cluster Aggregates
(BPCA), and modified BPCAs including e.g. different constituent size distributions. We show that accounting for attractive surface forces such as adhesion a simple approach is able to: (a) generally account for
the size dependence of the specific break-up energy for fragmentation to occur reported in the literature,
namely the division into ‘‘strength’’ and ‘‘gravity’’ regimes and (b) estimate the maximum aggregate size
in a collisional ensemble to be on the order of a few tens of meters, consistent with the maximum particle
size observed in Saturn’s rings of about 10 m.
Ó 2012 Elsevier Inc. All rights reserved.
1. Introduction
Saturn’s rings consist of a myriad of particles ranging in size
from dust to a few kilometers. The largest of these, tens of meters
and larger, form the population of propeller-causing objects following a rather steep size distribution (e.g. Tiscareno et al., 2006;
Sremčević et al., 2007) including the two embedded, gap-opening
moons Pan and Daphnis. The large majority of ring objects are
much smaller than these and have not been observed individually
to date. Collisions among these objects are frequent and the
observed size distribution is likely a result of the balance between
coagulation and fragmentation processes (Longaretti, 1989;
Barbara and Esposito, 2002; Spahn et al., 2004). The enhanced
brightness of propeller structures (Sremčević et al., 2007) and of
the halos around strong resonances (Hedman et al., 2007) suggests
the presence of smaller ring particles in perturbed regions, indicating a change in the particle size distribution due to higher collision
speeds there. Moonlets and clumps, most likely transient in nature,
are embedded in the F ring (Esposito et al., 2008; Beurle et al.,
2010) and strongly perturbed by their shepherd satellites (Murray
⇑ Corresponding author. Fax: +49 331 977 1045.
E-mail address: anag@agnld.uni-potsdam.de (A.H.F. Guimarães).
0019-1035/$ - see front matter Ó 2012 Elsevier Inc. All rights reserved.
http://dx.doi.org/10.1016/j.icarus.2012.06.005
et al., 2005). These Dynamic Ephemeral Bodies (DEB) (Weidenschilling et al., 1984) could emerge from ongoing disruptions and
re-accretions on dynamical timescales that give this narrow ring
its vivid appearance. While dissipative collisions ensure the stability of a planetary ring (Goldreich and Tremaine, 1978), relative impact speeds and sizes determine whether coagulation, restitution
or fragmentation occur (e.g. Spahn et al., 2004). The latter outcome
can further be sub-classified including erosion where part of the
mass is removed (e.g. Dohnanyi, 1969) or a type of erosion where
mass is transferred between the collision partners during a collision with a bouncing outcome (Güttler et al., 2010). Fragmentation,
however, is not caused only by collisions, but also by tidal stresses
(Davis et al., 1984). In general, agglomeration (coagulation) of
small ring particles (constituents) may create larger objects while
fragmentation (fission or disruption) would naturally counteract
and limit this growth. Already small bodies in the Solar System
generally show features of strength and their mechanical properties undoubtedly play a major role in their collisional evolution
(Holsapple, 2009), where strength is defined as some measurement
of a material ability to withstand particular stresses, strains or
loads. In the case of agglomerates the resistivity is defined by the
contact forces between the constituents (see e.g. Scheeres et al.,
2010). These bonds are typically broken long before a material
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
661
Nomenclature
c
c
c0
b
N
m
X
q
qagg
A
C
CN
D
EA
EG
ET
Efragment
f
e
f ð RÞ
G
g
gc
gm
gfrag
H
Htrue
M
average adhesion energy density
twice the surface free energy
surface free energy
number of constituents in unit cell
Poisson ratio
mean motion
density of the constituent material
density of the aggregate
pre-factor from the adhesion energy
total number of contact
coordination number (number of contacts of a single
constituent)
combined bulk material constants
adhesion energy
gravitational self-energy
total self-energy given as ET = EG + EA
energy of a fragment during the breaking process
filling factor of an aggregate
fragment size distribution
gravitational constant
relative velocity
relative critical velocity where the aggregate neither
grow nor shrink
aggregate relative mean impact velocity
critical fragmentation relative velocity
modified Hill sphere
true Hill sphere
aggregate total mass
failure of a single constituent can occur. Seipenbusch et al. (2007)
showed that the bond strength between particles (energy per area)
arranged in larger objects such as agglomerates, is one key parameter for understanding the mechanical properties of these composite materials. Furthermore, the coordination number (number of
contacts per constituent) plays a crucial role in determining these
properties. In asteroids, the resistivity can be divided into a
strength-dominated and gravity-dominated regime (Housen and
Holsapple, 1990; Love and Ahrens, 1996; Benz and Asphaug,
1999). Typically, resistivity decreases with increasing object size
until, starting at a transition size, resistivity increases as the body
self gravitational influence becomes dominant. Similar to asteroids
ring particles are thought to be rubble piles – loosely bound aggregates. Observations show that ring particles (aggregates) are under-dense (’400 kg m3), e.g. by comparing: (a) the inferred
particle size distribution (Zebker et al., 1985; French and Nicholson, 2000; Marouf et al., 1983) and the surface mass density derived from density wave analysis (Tiscareno et al., 2007), and (b)
simulations and observations of the self-gravity wakes induced
(i) ring brightness asymmetry (French et al., 2007) and (ii) ring
optical depth asymmetry (Salo, 1992a, 1995; Colwell et al., 2006,
2007; Hedman et al., 2007; Robbins et al., 2010). Further, as the
ring’s velocity dispersion in unperturbed regions is small
(mm s1–cm s1) compared to the orbital velocity (km s1), these
low-speed impacts are generally favorable for aggregation (e.g.
Hatzes et al., 1991). A velocity-dependent coefficient of restitution
has been derived using collision models based on viscoelastic
particle interactions (Brilliantov et al., 1996). Taking into account
surface adhesion (Johnson et al., 1971) more recent models are
able to consistently model both low-velocity sticking and bouncing
between individual particles (Albers and Spahn, 2006; Brilliantov
et al., 2007) in qualitative agreement with laboratory experiments
(Bridges et al., 1984; Hatzes et al., 1991). Furthermore, Scheeres
m
Meff
N
Nu
Q
Qw
QA
QG
R
Rc
Rg
Rm
Rt
S
s
s0
U
vth
WA
WG
Y
mass of a single constituent particle
effective mass of two aggregates
number of constituent particles
number unit cells
specific self-energy (energy per mass)
specific break up energy, threshold energy required to
break an object such that the largest fragment has half
the mass of the original body
specific adhesion energy
specific gravitational self-energy
aggregate radius
characteristic radius, denotes the radius of a homogeneous sphere
gyration radius
this is a critical (minimal) radius size for the projectile
(the smaller aggregate) to always fragment the collisional partner aggregate
transition radius size which an aggregate is more likely
to be destroyed
new surface area after breakage
radius of a constituent particle
radius for equal sized particles
extended gravitational potential of an aggregate
thermal velocity
denotes the work done to create new surfaces
is the work done to physically separate the fragments
within their own gravitational field
Young’s modulus
et al. (2010) have shown the importance of surface forces in comparison to all other relevant forces between constituents of an
asteroid to explain their stability against fast rotation. First
attempts to implement surface forces in N-body simulations of
particles in a planetary ring have been performed by Perrine
et al. (2011) where internal long range correlations between the
constituents in the aggregate have been neglected for simplicity.
In order to quantify the balance between aggregation and fragmentation, we discuss the resistivity and stability of particle aggregates
which are made of multi-constituents and are bound together by
short-range adhesive contact and long-range gravitational forces.
This work is an extension of Albers and Spahn (2006) who demonstrated that objects in the rings as large as 10 m could exist, matching the inferred size of ring particles (Zebker et al., 1985). These
estimates are based on orbital dynamics including adhesive forces
as well as collision using collisional velocities typical for the ring.
However, Albers and Spahn (2006) restricted their study to binary
aggregates (two constituents). Here we analytically calculate the
specific self-energy and resistivity (specific break-up energy) of
N-particle aggregates and compare these to numerically created
aggregates of various types such as regular packings, Ballistic Particle Cluster Aggregates (BPCA), and modified BPCA including particle size distributions. We then infer their stability/persistence in
collisional and tidal regimes. Implications for the size distribution
of Saturn’s rings will be discussed. Unless otherwise indicated size
refers to the radius of an object.
2. Aggregate self-energy, resistivity, and stability – an analytical
approach
Consider an aggregate of size R and mass M made of N constituent particles, generally described by a constituent size distribution.
662
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
Each constituent is a solid particle of mass m, radius s and density q.
Part of a planetary ring, this aggregate is both a collisional target
and projectile. Without studying the details of an aggregate internal
stress-distribution or orbital motion, we calculate its specific selfenergy Q, composed of contact energy and gravitational self-energy,
and specific break-up energy Qw as an estimate for its resistivity.
We find that the resistivity of an aggregate may be divided into a
strength and gravity regime with a transition at a transition size
Rt. Further, we show that a critical aggregate size Rcrit exists which
an object is more likely to be destroyed than others. Finally, we discuss the stability of an aggregate in a tidal environment.
The total self-energy of an aggregate is given by the sum of its
self-gravity EG and internal contact energy EA as: ET = EG + EA. The
specific self-energy (energy per mass) of an aggregate is then given
by Q = ET/M. The gravitational energy between two constituents
reads
ð2Þ
Gm1 m2
;
j~
r2 ~
r1 j
ð1Þ
ð2Þ
where G denotes the gravitational constant. This EG is equal to the
amount of energy needed to physically separate two particles to
infinity, since gravity is a conservative force. In contrast to gravity,
the collisions of icy adhesive, viscoelastic particles are irreversible
(Albers and Spahn, 2006; Brilliantov et al., 2007). Taking into account both elastic and adhesive contributions the energy of an
adhesive bond reads (see Appendix A for details)
1
ð2Þ
EA ¼ cpa2eq ;
5
ð2Þ
1=3
1
36p5 c5 D2 s4eff
:
5
4=3
N X
N
N X
N
eX
A
GX
mi mj
si sj
C ij
;
2 i¼1 j¼1 j~
si þ sj
ri ~
rj j 2 i¼1 j¼1
0
R
Z
R
.ð~rÞ.ð~r0 Þ
0
j~
r ~
r0 j
ð2Þ
3
3
d r d r0 ;
ð4Þ
where in the limit of a homogeneous sphere one obtains EG = 3
GM2/(5R). Both self-gravity EG and contact energy EA do not only depend on the aggregate size but also on the internal size distribution
and arrangement of constituents – the aggregate packing style. Bulk
and surface properties of an aggregate generally differ and the total
ðbulkÞ
self-energy, equivalent to Eq. (3), may be written as ET ¼ EG
ðbulkÞ
þEA
Esurface . In the limit of large aggregates R ? 1, we have
ðbulkÞ
! constant, EG =M ! 1, and Esurface/M ? 0, decreasing
the surface contribution in the total energy of the body with the
size. We further define the global filling factor of an aggregate as
the ratio of total constituent volume and aggregate volume:
P
f ¼ i s3i =R3 . In the case of regular, crystal-like packings like facecentered cubic (fcc) or body-centered cubic (bcc) we may utilize
the bulk specifications of the particular crystal structure listed in
Table 1.
In particular, the total number of contacts C and total number of
particles N of equal size s0 can be directly calculated from the bulk
coordination number CN (number of contacts of a single constituent)
b
b where Nu is the number of unit cells and N
as C = NCN/2 and N ¼ N u N,
the number of constituents in a single unit cell. Further, the number
b Þ, where V
b ¼v
^ s30 is the volume of a unit
of unit cells is N u ¼ 4pR3 =ð3 V
b v
^ Þ and the
cell. The filling factor f then reduces to f ¼ ð4p=3Þð N=
aggregate mass can be written as M = 4 pqfR3/3. Hence, the total
contact energy is the sum over all binary contacts given by the
second term in Eq. (3) and reads
3 5=3
The bulk material constants Young’s modulus Y and Poisson ratio m
have been combined into a single constant D = 3(1 m2)/(2Y), implicitly assuming that all particles are made of the same material.
Throughout this study we use G = 6.67 1011 kg1 m3 s2 and
material constants commonly used for icy particles (constituents):
q = 910 kg m3, c0 = 0.357 N m1, Y = 7 109 Pa and m = 0.25 (Chokshi et al., 1993; Dominik and Tielens, 1997; Brilliantov et al., 2007).
Gundlach et al. (2011) recently measured c0 = 0.19 N m1. Well
aware that the surface adhesion c is currently the most uncertain value and subject of ongoing debate, we additionally use a lower estimate c0 = 0.1 N m1 (Wada et al., 2008) in order to bracket our
results. In the case of icy particles, as expected for Saturn’s rings,
Eq. (2) is identical to Albers and Spahn (2006, their Eq. (23), Wada
e ¼ ð36p5 c5 D2 Þ1=3 =5 et al. (2008). For convenience, we define A
5 2 1=3
1=3
e
4:45ðc D Þ
with ½ A ¼ N m
. Therefore the total self-energy of
an aggregate made of N constituents reads
ET ¼ Z
EA ¼ AC N fR s0
2=3
where a2eq ¼ 6pcDs2eff
is the equilibrium radius of the contact
area formed between two adhering constituents, and seff = s1s2/
(s1 + s2) denotes the effective particle size and c is twice the surface
free energy c0. Thus, the equation can be re-written as
EA ¼ G
2
ðbulkÞ
EA =M
2.1. Specific self-energy Q
EG ¼ EG ¼ ð5Þ
;
e
where A ¼ A=ð4
2 Þ. This equation is valid for any aggregate
made of equal-sized spheres. Using Table 1 we obtain for fcc pacðfccÞ
ðbccÞ
ðfccÞ
kings EA AR3 s5=3
, and similarly, EA 0:6EA . We combine
0
Eqs. (4) and (5), both divided by the aggregate mass, and write
the total specific self-energy as
1=3
Q¼
E
4p
3 AC N 5=3
2
¼ QG þ QA ¼ s
:
GqfR M
4p q 0
5
ð6Þ
It depends on average properties such as filling factor, coordination
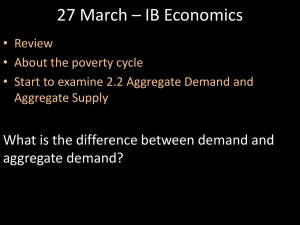
number, and constituent size. As expected from a short range interaction, QA is independent of the actual aggregate size. Fig. 1 shows
the specific self-energy (Eq. (6)) for fcc aggregates as a function of
size R. Different horizontal lines correspond to different constituent
sizes or different c values.
Regularly packed aggregates typically show high self-energies
due to their dense packing (high interconnectivity) resulting in
both larger gravitational and bond contributions. In general, the
self-energy is primarily determined by the internal arrangement
or packing style, parameterized by the average coordination number and filling factor. As seen in Fig. 1 the specific self-energy can
be divided into a strength-dominated and gravity-dominated
regime with a transition occurring at size Rt, where QA(Rt) = QG(Rt).
Solving Eq. (6) yields
ð3Þ
where Cij is unity if particle i and j are in contact and zero otherwise.
Of course, for the indices i – j must be guaranteed. The specific selfP
energy reads Q ¼ ET = Ni¼1 mi . Assuming that the average size of
individual constituents is much smaller than the actual aggregate,
hsi R – corresponding to a mean field representation, the gravitational self-energy may be expressed as
Table 1
b bulk
Regular packing characteristics of single unit cell: number of constituents N,
coordination number CN, bulk filling factor f, and volume scaling factor v^ where the
b ¼ v^ s3 and s0 is the constituent size.
volume of the unit cell is V
0
Packing
b
N
CN
fcc
4
12
bcc
2
8
v^
f
pffiffiffi
16 2
pffiffiffi
64
3
9
0.68
0.74
663
2
10
10
1
10
10
0
10
10
-1
10
10
-2
10
10
-3
10
10
-4
10
10
-5
10
-3
-6
-1
0
10
10
1
10
10
0
10
-1
10
-2
10
-3
10
-4
10
-3
-4
-5
Q [erg/g]
10
-8
gravity
adhesion
fcc s = 0.001m
s = 0.01m
s = 0.1m
1
10
-5
-7
10
10
-4
-6
-2
2
10
-6
10
-7
10
-8
10
-9
-5
10
10
-10
gravity
adhesion
m-1],s=0.01m
-1
fcc γ = 0.74 [N
fcc γ = 0.20 [N m ],s=0.01m
-6
10
10
2
-1
10
Q [J/kg]
-2
10
Q [J/kg]
Q [erg/g]
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
0
10
10
Aggregate Radius [m]
1
10
-9
10
-10
10
2
10
Aggregate Radius [m]
Fig. 1. The specific self-energy for fcc aggregates using Eq. (6) for (a) various constituent sizes s0 and (b) different adhesion strengths. The transition from strength-dominated
to gravity-dominated self-energy occurs at the intersection of the gravity and adhesion lines – at transition radius Rt.
R2t ¼
15 A C N 5=3
:
s
16p2 G q2 f 0
ð7Þ
An aggregate made of icy cm-sized fcc-arranged particles gives Rt
between 1 and 5 m (cf. Fig. 1b). Similar to Q, the transition size Rt
primarily depends on constituent size and adhesive strength. Generally, stronger adhesion and smaller constituent sizes yield larger
transition sizes. Objects larger in size than Rt lie in the gravity
regime and their own gravitational field is sufficient to maintain
their coherence. Aggregates smaller then Rt are dominated by their
internal strength made of adhesive bonds and so they are in the
strength regime. This classification into a strength-dominated and
gravity-dominated regime directly translates to an aggregate resistivity and the implications for the likeliness of fragmenting an
aggregate will be discussed in the next section.
2.2. Specific break-up energy Qw
ð8Þ
i
where WA denotes the work done to create new surfaces, WG is the
work done to physically separate the fragments within their own
gravitational field, and Efragment and Eagg are the respective selfenergies. For the sake of simplicity, we concentrate on fragmenting
the aggregate and exclude reconfiguration. In the following we assume a final fragmentation outcome and disregard dissipative (heat
generating) processes. Also, we concentrate on the energy necessary
to split an aggregate and neglect any kinetic energy that both fragments and original aggregate might have (fragments and aggregate
are considered at rest). Further, since one of our goals is to estimate
the effects of the typically low-speed collisions within planetary
rings, no shock wave generation on impact is taken into account
(quasi-static approximation). Then, the specific energy required to
break-up reads
W A ðRÞ þ W G ðRÞ
:
M
ð9Þ
In the literature this specific energy required for break-up, typically
referred to as Qw, is defined as the threshold energy required to
break an object such that the largest fragment has half the mass
of the original target object (e.g. Love and Ahrens, 1996). We
approximate WG by the gravitational self-energy as given in Eq.
(4) and estimate that this approach is accurate to within 10%. In order to estimate the work WA required to create a new surface area S
we define an average adhesion energy density as
c ¼
EA
:
V
ð10Þ
In the bulk of a regular packed aggregate of radius R with monomers
of size s0 it reads
c ¼ Any configurational changes of an aggregate imply changes in
the effective contact surface including broken bonds and newly
created surfaces. Thus, in order to rearrange or fragment an aggregate energy must be provided. In the context of planetary rings
(see discussion in Sections 4.1 and 4.2) tidal stresses of the nearby
planet and mutual collisions are the most important energy
sources. As these processes are generally irreversible a fraction of
this energy will inevitably be dissipated in form of heat. Total
energy is conserved and
X
Efragment i ¼ Eagg þ W A þ W G þ generated heat;
Q H ðRÞ ¼
3
5=3
AC N fs0 :
4p
ð11Þ
Breaking the aggregate by simply disconnecting existing bonds
along a rupture surface with the average thickness as wide as the
Ss0 .
radius of an individual constituent s0 will form. Thus, W A ¼ c
In agreement with the literature we let the largest fragment contain
half of the mass of the original aggregate. In one of the extreme
cases this will create two equal-sized fragments and two new
surfaces with area of Smin = pR2 corresponding to a minimum work
required W min
A , equivalent to ‘‘splitting the aggregate in halves’’. In
reality, however, the actual crack surface has variable roughness
and is enlarged due to the arrangement of individual constituents.
Depending on the input energy multiple rupture surfaces may occur
that allow for the creation of multiple fragments. These newly created surface areas can then be calculated using a fragment size dise as
tribution f ð RÞ
S¼
Z eR max
eR min
e R:
e
p Re 2 f ð RÞd
ð12Þ
Without loss of generality we assume that fragments are distribe p . The numerical constant
e ¼ aR
uted according to a power-law f ð RÞ
a may be obtained from mass conservation (here from conservation
of volume since we assume constant q for all constituents) with R3
R eR
e 3p d R.
e Then, by simple relation W A =S ¼ W min =Smin and Eq.
¼ e max a R
A
R min
(12) the required work to create multiple fragments is calculated as
e
e
W A ¼ W min
A RFðp; R min ; R max Þ;
ð13Þ
664
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
where
e min ; R
e max Þ ¼ 4 p
Fðp R ½3; 4; R
3p
e 3p
e 3p
R
max R min
;
e 4p
e 4p
R
max R min
"
#
e max
R
1
e
e
log
Fðp ¼ 3; R min ; R max Þ ¼
;
e min
e min
e max R
R
R
!
"
#!1
e max
R
1
1
e max Þ ¼
e min ; R
log
:
Fðp ¼ 4; R
e min
e min R
e max
R
R
ð14Þ
ð15Þ
ð16Þ
Finally, we obtain
e min ; R
e min ; R
e max Þ ¼ 3 GM þ W min R Fðp; R
e max Þ:
Q H ðR; p; R
A
5 R
M
ð17Þ
e max to correspond
We fix the size (radius) of the largest fragment R
to half of the aggregate mass (e.g. Love and Ahrens, 1996) and further assume that the largest fragments
pffiffiffi has the internal density of
e max ¼ R= 3 2. The smallest possible fragthe aggregate qagg. Then, R
e min is equal to the size of the smallest constituent, in this
ment size R
e min ¼ s0 . Eq. (17) can then be written as
case R
Q H ðp; s0 ; RÞ ¼ ffiffiffi
p
4p
9 AC N 2=3
3
2
s
Fðp; s0 ; R= 2Þ:
GqfR 16p q 0
5
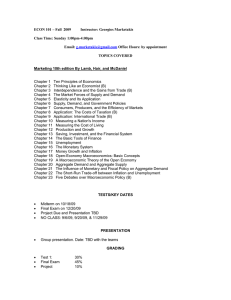
Fig. 3. Specific energies for fcc aggregates with particle sizes s0 = 1 cm The total
energy given by Eq. (6) is the sum of the specific adhesive and gravitational selfenergy. In order to break an aggregate into two equal-sized halves we calculate the
minimum specific energy Qw using Eq. (18). We mark the location of transition Rt
and critical radius Rcrit. The first marks the transition between the strengthdominated and gravity-dominated regime. The latter marks which aggregate size is
most vulnerable to destruction and is defined as the global minimum of Qw(R). Even
if the hypothesis of breaking an aggregate into two halves, this approach is in
qualitative agreement with (e.g. Love and Ahrens, 1996).
ð18Þ
In the case of splitting the aggregates in halves we may write
Q H ðhalvesÞ ¼ aG R2 aA R1 ;
4p
aG ¼ Gqf ;
5
9 AC N 2=3
aA ¼
s
;
16p q 0
ð19Þ
ð20Þ
Fig. 2b. Comparing Fig. 2a and b reveals that, as expected, with
higher damage ratios the number of fragments increase. With
100% damage done, the aggregate is completely disintegrated corresponding to Qw = Q. Moreover, Fig. 2a suggests that aggregates of
a certain critical size Rcrit are more vulnerable to being damaged
than others. At this Rcrit the energy required to break-up Qw assumes a global minimum, and thus, from Eq. (18) we may infer
ð21Þ
where [aG] = s2 and [aA] = J m kg1.
Fig. 2a shows results for various fragment size distribution
slopes using Eq. (18) for fcc aggregates. Following Love and Ahrens
(1996) specific impact energies above Q H
min typically yield more
numerous and smaller fragments; lower specific energies cause
just cratering and spallation but leave the target essentially intact.
Naturally, the upper limit for Qw is Q, the total self-energy of an
aggregate, resulting in a total disintegration of the aggregate. For
cases populating the area between the limiting curves Qw and Q
less than 50% of the original bonds are left intact. The related damage ratios (DR), defined in Moreno-Atanasio and Ghadiri (2006) as
the ratio of broken contacts to their initial number, are shown in
R3crit ¼
10
0
10
-1
10
-2
10
¼
3
s0 R2t :
8
ð22Þ
In Fig. 3 we illustrate the critical and threshold radius for fcc aggregates with constituents of s0 = 1 cm.
Average bulk properties of aggregates may be used together
with the mean-field equations Eqs. (7) and (22) to calculate the ex-
1000
-3
1
10
aA
2aG
-4
10
-6
10
halves
p=1
p=2
p=3
p=4
p=5
p=6
total
-3
10
-4
10
-1
10
0
10
1
10
Aggregate Radius [m]
DR [%]
*
Q [J/kg]
Q* [erg/g]
100
-5
10
10
halves
p=1
p=2
p=3
p=4
p=5
p=6
total
-7
10
-8
10
2
10
1
-1
10
0
10
1
10
2
10
Aggregate Radius [m]
Fig. 2. Different input energies lead to different fragmentation outcomes ranging from two fragment halves (each with half the mass) to total disruption (Qw = Q): (a) Eq. (18)
is computed using s0 = 1 cm, (b) related damage ratios in percent of broken contacts (Moreno-Atanasio and Ghadiri, 2006).
665
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
fcc packing
fcc packing
transition
range
strength-dominated
Rt
R crit
0.1
0.001
0.010
0.100
1.000
Constituent Size [m]
(a) transition range
10.0
1.0
γ =0.74 Nm-1
γ =0.20 Nm-1
0.1
0.001
0.010
0.100
1.000
Aggregate Size [m]
gravity-dominated
1.0
various packing styles
10.0
Aggregate Size [m]
Aggregate Size [m]
10.0
f=0.68, CN =12 (fcc)
f=0.2 , CN =2 (BPCA)
f=0.3 , CN =4 (BAM1)
f=0.4 , CN =6 (BAM2)
f=0.4 , CN =2 (DC)
1.0
0.1
0.001
Constituent Size [m]
(b) different adhesion strength
0.010
0.100
1.000
Constituent Size [m]
(c) different packings
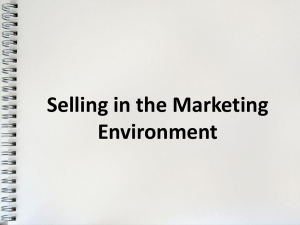
Fig. 4. Strength-and gravity-dominated regimes: The plots illustrate the dependencies of Rcrit and Rt on the adhesive strengths gamma and different packings. Variability with
surface free energy is comparable to variability across different aggregate packing styles. Different fragmentation outcome described by power-law distributions above yield
QH
min within the transition regime. Critical Rcrit (dashed line) and transition radius Rt (dotted line) mark its boundaries.
pected transition and critical radii for various packing styles. Fig. 4
shows the results as functions of constituent size. The gray-shaded
area marks a region which aggregates can never reach and is confined by Rbinary, the minimum aggregate radius determined as the
characteristic radius of a binary aggregate (see also Section 3).
Aggregates larger than the transition radius lie within the gravity-dominated regime and those smaller than the critical size within the strength-dominated regime (see Fig. 4a). The transition
regime constitutes part of the strength regime where different
fragment size distributions yield slightly different Qw, whereas
aggregates at their critical radius are most vulnerable to destruction as these yield only two fragment halves (cf. Fig. 2). Fig. 4b
shows the dependence of the certain radii on the surface free energy c within our chosen minimum and maximum value. Different
packing styles, expressed by their internal filling factor and corresponding coordination numbers, are illustrated in Fig. 4c. The
resulting variability in both, Rcrit and Rt, is comparable to their variability with c. In Section 3.2 we will directly identify amorphous
packing styles of more realistic aggregates with the here chosen
average bulk properties (cf. Figs. 9 and 10).
This division into strength-dominated and gravity-dominated
regime is in qualitative agreement with e.g. Love and Ahrens
(1996).
3. Aggregate models – a numerical approach
In this section we will compare the analytical expressions
derived for regularly packed aggregates in Sections 2.1 and 2.2 to
more realistic random arrangement of particles. To this we numerically create aggregates of various packing styles. As before, all
aggregates will be made of a single material type. We consider regularly and randomly packed aggregates: Firstly, aggregates built of
equal-sized monomers arranged in close regular packings including face-centered cubic (fcc) and body-centered cubic (bcc) structure; secondly, amorphous configurations like Ballistic Particle
Cluster Aggregates (BPCA) are created. We investigate classic
BPCAs and various modifications to their configuration including
the standard modifications BAM1 and BAM2 (Shen et al., 2008)
(ballistic aggregates with one or two migrations see below for details), different constituent size distributions, and aggregate
density constraints. We will numerically compute their specific
self-energy Q and specific break-up energy Qw using various
numerical approaches. Finally, we will compare these to the ana-
lytical ones presented in the previous sections. In order to better
describe the size both crystal-like and fractal-like agglomerates,
which may feature both irregular surfaces and irregular shapes,
we employ a characteristic radius Rc, related to the gyration radius
Rg, which are commonly used in polymer and proto-planetary sci!
ence (e.g. Mukai et al., 1992; Lobanov et al., 2008). Let r i , si, and mi
be the location, size, and mass of the ith constituent, then
P
P
M ¼ Ni mi and ~
r i Þ=M denote the total mass and center
r c ¼ Ni ðmi~
of mass of the aggregate. With this, we define the quantities
sffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
P
! ~ 2
i mi ð r i r c Þ
Rg ¼
and
M
rffiffiffi
5
Rg :
Rc ¼¼
3
ð23Þ
ð24Þ
Here, the characteristic radius Rc denotes the radius of a homogeneous sphere with a gyration radius equivalent to that of the aggregate. In general, Rc well describes the actual size of an agglomerate
including close-packings, classic BPCAs, and those with internal size
distributions. In Fig. 5 we illustrate the characteristic and gyration
radii by a classic BPCA with 5000 particles.
3.1. Regular packings
We arrange individual particles into larger agglomerates using
the characteristic bulk properties of regular packings (listed in
Table 1) and corresponding lattice structures. Fig. 6 shows examples of fcc and bcc aggregates, constructed numerically.
These organized, crystal-like packings consisting of equal constituents achieve high coordination numbers resulting in both high
filling factors (high internal density) and high connectivity. This, in
turn, implies an extended strength regime and generally larger
self-energies Q. As discussed in Section 2.1 high coordination numbers directly affect aggregate properties like resistivity. In our analytical mean field calculations, Eqs. (6) and (18), the effects of the
free aggregate surfaces – surface energy and surface tension – have
been neglected. The effect of this simplification as a function of
aggregate size is demonstrated by comparing numerical and
analytical calculations of the adhesive self-energy for various
aggregate sizes. The exact numerical computation of the self-energy, which considers all surface effects, is already achieved by
Eq. (3) divided by the aggregate mass M. In Fig. 7 we plot the adhesive contribution to the self-energy Q. The relative error of using
666
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
Fig. 5. We use the characteristic radius Rc to describe the aggregate radius consistently referred to as R. It is based on the gyration radius Rg and defined in Eqs. (23) and (24).
These are illustrated by a BPCA made of 5000 monosized particles: (a) the actual aggregate, (b) aggregate and corresponding sphere of gyration radius Rg, and (c) aggregate
and corresponding sphere of characteristic radius Rc.
1.1
1
Fig. 6. Aggregates composed of close-packed equal spheres: (a) face-centered cubic
(fcc) and (b) body-centered cubic (bcc) configuration. These regular, crystal-like
arrangements yield high coordination numbers and thus high filling factors (cf. also
Table 1).
Accuracy
0.9
0.8
0.7
0.6
0.5
the mean-field equation, caused by the surface effects, is about 15%
for 1 m aggregates with s0 = 10 cm and vanishes for larger
aggregates.
To numerically address the question of how much energy is
needed to split an aggregate we will follow two different approaches: (1) a semi-analytical and (2) a purely numerical approach. We will then compare these to results obtained from Eq.
(18). For simplicity, we will concentrate on splitting an aggregate
into halves and therefore consider only a single fracture plane.
1. The semi-analytical approach: We first numerically calculate
the adhesion self-energy EA as defined in the second term of
Eq. (3). Then we apply the analytical approach outlined in Eq.
(10) in Section 2.2 where we introduced an adhesion energy
. Using c
we then calculate the specific break-up
density c
energy for the surface area S = pR2 and crack width s0.
2. The purely numerical procedure: Mimicking a crack surface we
define a plane which intersects the center of mass of the aggregate. We then identify which bonds intersects that plane and
declare these to be broken. Finally, we simply count their number and calculate the corresponding energy.
Fig. 8 shows a comparison between the analytical, semi-analytical, and purely numerical approach to obtain an aggregate specific
break-up energy. Both semi-analytical and numerical approaches
are within 10–15% of the analytical estimates for aggregates where
R/hsi 10. If R/h si < 10 accuracy drops to within 70% as the
aggregates comprises merely 500 or fewer individual particles.
Naturally, the accuracy improves as R ? 1 and thus N ? 1. The
constituent size typically used in the following sections is about
numerical/analytical
0.4
1
2
3
4
5
6
7
8
9
10
Aggregate Radius [m]
Fig. 7. Comparison of the analytically and numerically obtained specific adhesive
self-energy (2nd term in Eq. (18)) for fcc agglomerates made of 10 cm-sized
constituents. The discrepancy due to neglected surface effects vanishes with R ? 1.
1 cm while aggregates are grown to at least decimeter size and
beyond. For these aggregates we estimate our inaccuracy to at
most 15%.
3.2. Random packings
Random arrangements of equal hard spheres have been used to
model a variety of physical problems (Mrafko and Duhaj, 1974). In
planetary science, these Ballistic Particle Cluster Aggregate (BPCA)
have widely been used for the study of asteroids and planetary formation (Richardson, 1995; Dominik and Tielens, 1997; Mukai et al.,
1992; Kolokolova et al., 2007; Shen et al., 2008, 2009), employing the
standard way of creating randomly arranged aggregates (e.g. Vold,
1959; Mukai et al., 1992). In our implementation of the classical
BPCA method we proceed as follows: A seed particle is placed at
the origin of a spherical coordinate system. Further constituents
are added in a ‘‘hit and stick’’ mechanism (Dominik and Tielens,
1997) after following random ballistic trajectories. These trajectories are determined by drawing from uniformly distributed
spherical angles while randomly choosing a target particle among
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
1.1
nðsÞ ¼ N
1
Accuracy
0.9
0.8
0.7
0.6
0.5
numerical/analytical
semi-analytical/analytical
0.4
1
2
3
4
5
6
7
8
9
10
Aggregate Radius [m]
Fig. 8. Comparison of the analytically, semi-analytically, and numerically obtained
specific break-up energy (adhesive part only) needed to split an aggregate into two
halves. Results are shown for fcc aggregates with constituents of 10 cm. Both semianalytical and numerical approaches are within 10–15% of the analytical estimates.
the current aggregate constituents. Using this method we obtain
rather fluffy aggregates. In order to achieve higher coordination
numbers and thus higher filling factors we use three different modifications to the classic BPCA algorithm:
1. BAM1 – ballistic agglomeration with one migration – requires
that each newly-added constituent has at least two contacts.
That is, upon ‘‘touching’’ a particle the new constituent will
migrate to the nearest second constituent by rolling or sliding
over the first.
2. BAM2 – ballistic agglomeration with two migrations – requires
that each newly added constituent has three contacts. This is
achieved by performing two BAM1 migrations in sequence
along the shortest possible trajectory.
3. DC – density-constrained – requires that a newly-added constituent can only be added if the resulting aggregate fulfills a minimum density criterion. In particular, every time a new
constituent is drawn we use the current aggregate mass to calculate the radius of an equivalent, homogeneous sphere of
given density. If the distance between the contact point of the
new constituent and the center of mass of the aggregate is
smaller than this radius, the constituent is accepted; otherwise
it is rejected and a new particle is chosen randomly. Here we
choose a pre-defined aggregate density qagg = 400 kg m3 in
order to match ring particle densities inferred from Cassini
observations (e.g. Tiscareno et al., 2007; Porco et al., 2007;
Robbins et al., 2010; Colwell et al., 2009).
BAM1 and BAM2 (see also Shen et al., 2008) can be understood
as random reorganization or compaction of the agglomerates due
to mutual collisions. DC, however, does not strictly adhere to the
BPCA philosophy since it substitutes the pure random placement
with a conditional random placement of particles. In addition to
the geometric modifications listed above (for BAM1 and BAM2
see also Shen et al., 2008) variable constituent size distribution
n(s) is also allowed. We consider primarily power-law distributions
given by
1k
sk :
smax smin
667
ð25Þ
In the case of monomers of size s0 this distribution simply reads
n(s) = Nd(s s0). Fig. 9 shows examples of all the different randomly-packed aggregates designed in this work: Monosized
agglomerates with s0 = 1 cm include (a) classic BPCA, (b) DC, (c)
BAM1 and (d) BAM2. Clusters made of particles with different sizes:
(e) k = 0 (uniformly distributed) between s 2 [0.1 10] cm, (f) k = 0
between s 2 [1 10] cm, (g) k = 3 between s 2 [0.1 10] cm, and
(h) k = 5 between 0.1 and 10 cm. These size ranges are motivated
by particle size distributions inferred from Voyager and Cassini
observations of Saturn’s rings (Marouf et al., 1983; French and
Nicholson, 2000; Zebker et al., 1985).
Bearing in mind that relative impact velocities in unperturbed
planetary rings are on the order of mm s1, collisions occur at sufficiently low speed to enable aggregation by adhesion (e.g. Hatzes
et al., 1991). Therefore, this ‘‘hit and stick’’-mechanism of aggregation (Dominik and Tielens, 1997) where all colliding particles have
a probability of sticking close to unity provides an adequate method. It, however, does not involve internal re-structuring of the
aggregate and resulting aggregates are fluffy in nature and typically show very low internal densities. Fig. 10 shows the internal
filling factor f of different aggregates as a function of distance from
the center of mass of the aggregate. We mark the characteristic radius for each of the aggregate examples (vertical lines). Typically, f
slowly decreases with distance from the center while taking a global average value. These average aggregate properties are found up
the characteristic radius beyond where the filling factor rapidly
drops. Merely ‘‘fingery’’ structures form the outermost shell of
the aggregate (compare also Fig. 5) and are a typical outcome of
the ‘‘hit and stick’’ formation process (Dominik and Tielens,
1997). In the case of classical BPCAs f 0.2. Even if the aggregate
has an internal size distribution (Fig. 10c and d) the filling factor
is comparable to the classic BPCA (Fig. 10a). Although one might
expect a denser packing with lowering the smallest size of the size
distribution smin, the random direction of particle placement prevents smaller particles from filling the voids. Only modifying the
aggregate formation process does alter aggregate properties.
BAM1 and BAM2 require multiple particle contacts resulting in a
tighter packing and thus higher filling factors. Similarly, in the case
of controlled internal density (DC) the filling factor is actively
determined and therefore matches the fixed aggregate density
with f 0.4.
The average coordination numbers are directly related to the filling factor f. BPCAs with and without size distribution have coordination numbers of approximately 2, since their formation processes
are the same. Coordination numbers are higher only if the geometric
packing conditions and, thus, the arrangement of constituents, is
changed. This is independent of the constituent size distribution.
Thus, BAM1 and BAM2 modified aggregates have by definition
CN 4 and CN 6, respectively. This is also true for the density-controlled aggregates, where the only difference in forming them is that
more mass is packed into the same volume. In the case of aggregates
made of equal-sized particles a higher coordination number directly
implies a higher adhesive self-energy. This correlation between
coordination number and adhesive self-energy is not necessarily
true for aggregates with size distributions as bond strength does
also depend on the effective size (contact area) of the particles in
contact. Also, we did not find a suitable average constituent size
for a given distribution that would satisfy this proportionality. We
have created aggregates of various sizes for each packing style.
Unless using a designated size distribution we evaluated the aggregates for s0 = 1 cm. Specific self-energies were calculated for each of
these according to Eq. (3). The specific break-up energies were
inferred using the semi-analytical approach for all BPCAs with
668
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
Fig. 9. BPCA and modified BPCAs with 25,000 constituents each. Top two rows: monosized agglomerates where (a) classic BPCA, (b) CD at 400 kg m3, (c) BAM1, and (d) BAM2.
Bottom two rows: Clusters made of particles with different sizes: (e) k = 0 (uniformly distributed) between s 2 [0.1 10] cm, (f) k = 0 between s 2 [1 10] cm, (g) k = 3
between s 2 [0.1 10] cm, and (h) k = 5 between s 2 [0.1 10] cm.
equal-sized constituents and the purely numerical approach for
those having an internal size distribution. Figs. 11 and 12 show
the specific energies for all aggregates. Each cross at given size
marks one aggregate. Lines are fitted to the data points.
669
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
0.6
(a)
(b)
BPCA
400 kg/m3
0.5
0.5
0.4
0.4
0.3
0.3
f
f
0.6
0.2
0.2
0.1
0.1
BAM1
BAM2
0
0
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
Ri /R n
0.6
0.6
UD 1-10cm
UD 0.1-10cm
0.8
1
0.8
1
s-3
s-5
(d)
0.5
0.5
0.4
0.4
0.3
0.3
f
f
(c)
0.6
Ri /R n
0.2
0.2
0.1
0.1
0
0
0
0.2
0.4
0.6
0.8
1
Ri /R n
0
0.2
0.4
0.6
Ri /R n
Fig. 10. Filling factor distributions as a function of normalized distance from the center of the aggregate Ri/Rn, where Rn is the radial distance of the outermost constituent: (a)
BPCA and DC, (b) BAM1 and BAM2, (c) BPCA with uniform size distributions (s 2 [1 10] cm and s 2 [0.1 10] cm), and (d) BPCA with size distributions of slope k = 3 and
k = 5 between s 2 [0.1 10] cm. Vertical lines mark the position of the characteristic radius Rc. Here, each aggregate consists of 30,000 particles.
Despite of generally lower specific adhesion energies of aggregates, the transition size associated with the classic BPCA aggregates in Fig. 11a of Rt 5 m is comparable to that of regular
packed aggregates (cf. Fig. 3) as their relatively low filling factor
f reduces their self-gravity. This, however, implies significantly
smaller break-up energies (on the order of one magnitude), consistent with what is generally expected for loosely-packed aggregates. It results in critical sizes around 0.4 m. BAM1 and BAM2
show slight larger transition and critical sizes given both their
higher coordination number and filling factors (see Fig. 11c and
d). A similar result is obtained for the DC aggregates in
Fig. 11b. Despite having a slightly denser packing, the DC aggregates have a smaller transition size at Rt 2.5 m due to their
coordination numbers of CN 2 similar to classic BPCAs. Including a constituent size distribution generally reduces the specific
adhesion energy and critical sizes compared to the classic BPCA
(see Fig. 12). Consequently, these aggregates are more easily disrupted. In general, aggregates with internal size distributions
have significantly smaller transition sizes. We note that the DC
aggregate has nearly the same Rt as the aggregate with a k = 5
distribution. In general, however, critical sizes lie within a few
decimeters regardless of packing style. Table 2 summarizes these
findings.
4. Application to planetary rings
We have calculated the specific self-energy Q of aggregates for a
wide range of packing styles. These different styles, but in particular the BPCA and their modifications, enable us to discuss aggregates that may resemble the under-dense fragile configuration
that ring particles most likely are. The self-energy proved to be
the key in determining the transition size separating the strength
and gravitational regimes. It furthermore denotes the limit for a
complete disruption of an aggregate. Most of the differences between particular aggregate types are due to differences in their
internal mass density and average coordination number. Further,
we have estimated the specific break-up energy Qw and find a good
qualitative agreement to laboratory experiments and impact simulations (Love and Ahrens, 1996). In this section we use these results
and discuss them in the context of planetary rings-in particular
Saturn’s rings. Observations imply an average ring particle density
of 400 kg m3 (cf. Section 1), and corresponding filling factor of
0.4. Further, it is also likely that due compaction the number
of contacts is higher than in the BPCA model but not as high and
ordered as in the fcc packing. Thus, a good approximation for a
realistic, average ring particle is most likely the BAM2 model which
has CN = 6 and f = 0.4. As shown in the previous section differences
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
-2
2
-3
10
-4
0
10
-1
10
-2
10
-3
10
-4
10
-5
10
-6
10
10
-5
10
-6
10
-7
10
-8
10
Q [erg/g]
1
10
Specific energy [erg/g]
10
adhesion
gravity
total
halves
Specific energy [J/kg]
10
-9
10
-10
10
-1
10
0
10
1
10
-2
10
2
10
1
10
0
10
10
-1
10
10
-2
10
10
-3
10
10
-4
10
10
-5
10
10
-6
10
2
-3
10
-4
-5
-6
-7
-8
-9
-10
-1
10
10
adhesion
gravity
total
halves
Q [J/kg]
670
10
0
1
10
10
2
10
Aggregate Radius [m]
Aggregate Radius [m]
(a) BPCA
10
adhesion
gravity
total
halves
1
10
-3
10
-4
0
10
-1
10
-2
10
-3
10
-4
10
-5
10
10
-7
10
-8
10
-9
10
-10
-6
10
10
-1
10
0
1
10
10
2
10
Q [erg/g]
Q [erg/g]
-6
10
Q [J/kg]
-5
10
-2
10
2
10
1
10
0
10
10
-1
10
10
-2
10
10
-3
10
10
-4
10
10
-5
10
10
-6
10
adhesion
gravity
total
halves
-3
10
-4
-5
-6
Q [J/kg]
-2
2
10
-7
-8
-9
-10
10
-1
10
0
1
10
10
Aggregate Radius [m]
Aggregate Radius [m]
(c) BAM1
(d) BAM2
2
10
Fig. 11. The specific energy (self-energy/mass) vs. radius of different BPCAs with equal-sized constituents. Each cross denotes one aggregate where we split the adhesive and
gravitational contributions. Lines are fits to the data points. All aggregates are made of 1 cm-sized constituents.
in specific energies Q and Qw between aggregates with same-sized
and size-distributed constituents are minor and result in transition
Rt and critical radii Rcrit that are of the same order of magnitude.
Here we concentrate on aggregates with one constituent size s0.
4.1. Tidal environment
In order to estimate the effects of a tidal environment on a porous aggregate we answer the question whether an additional constituent of mass m added to the aggregate will still be within the
aggregate Hill sphere. We therefore slightly modify the derivation
of the classical Hill sphere to incorporate attractive surface forces.
Consider an aggregate of mass M to be in a perfectly circular orbit
at distance d from the planet with mass Mp. Then in a coordinate
system, centered on the aggregate, x is radial coordinate relative
to the secondary body (x = r d), y is the azimuthal direction,
and z is the vertical direction. In the framework of the threebody-problem we consider the center of mass of the aggregate to
be the ‘‘secondary body’’ with Mp M m. The equation of motion of a constituent ‘‘test particle’’ at (x, y, z) is (e.g. Salo, 1995;
Murray and Dermott, 2000):
€x 2Xy_ þ ðj2 4X2 Þx ¼ @ x U;
€ þ 2Xx_ ¼ @ y U;
y
€z þ m2 z ¼ @ z U;
where X is the mean motion, j is the radial frequency (X), m is the
vertical frequency (X), and U is the total energy (potential) of the
_ y,
_
aggregate (secondary body). Multiplying these equations with x;
and z_ , respectively, and adding them up we obtain the well-known
Jacobi integral:
x_ 2 þ y_ 2 þ z_ 2 þ ðj2 4X2 Þx2 þ m2 z2 ¼ 2U þ const:
ð26Þ
At this point we are interested in a simple scale H within which a
particle is bound to the aggregate (jxj < H) and will not drift away.
For the minimal stability we set x_ ¼ y_ ¼ z_ ¼ 0; x ¼ H; y ¼ z ¼ 0,
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
3
and assume j X GM p =d corresponding to a spherical symmetric planet. The attractive force acting on a single constituent of
mass m is a combination of the aggregate gravity and adhesive surface force. For simplicity we assume that the additional constituent
is resting on the aggregate and makes one adhesive contact with a
particle of the aggregate, corresponding to the equilibrium contact
671
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
101
0
10-4
100
10
-1
10-5
10-1
10
-2
10-6
10-2
10
-3
10-7
10-3
10
-4
10-8
10-4
10
-5
10-9
10-5
10
-6
10-10
10-6
10
10
10
10
10
10
-1
0
10
1
10
2
10
-5
-6
-7
-8
-9
-10
0
10
10
1
2
10
Aggregate Radius [m]
Aggregate Radius [m]
(a) Uniform, cm-dm
(b) Uniform, mm-dm
2
-3
10
-4
-1
10
10
adhesion
gravity
total
halves
10
-2
102
10-3
101
0
10-4
100
10
-1
10-5
10-1
10
-2
10-6
10-2
10
-3
10-7
10-3
10
-4
10-8
10-4
10
-5
10-9
10-5
10
10-10
10-6
adhesion
gravity
total
halves
1
10
10
10
10
10
10
10
-6
10
-1
0
10
1
10
Specific energy [erg/g]
10-2
10
2
10
10
adhesion
gravity
total
halves
-3
10
-4
-5
-6
-7
-8
-9
-10
10
-1
10
Specific energy [J/kg]
10
Specific energy [J/kg]
Specific energy [erg/g]
10
Specific energy [erg/g]
10-3
1
Specific energy [J/kg]
102
10
Specific energy [erg/g]
-2
10-2
adhesion
gravity
total
halves
Specific energy [J/kg]
2
10
0
10
10
Aggregate Radius [m]
1
2
10
10
Aggregate Radius [m]
, mm-dm
, mm-dm
Fig. 12. The specific energy (self-energy/mass) vs. radius of different BPCAs with internal size distribution. Each cross denotes one aggregate where we split the adhesive and
gravitational contributions. Lines are fits to the data points.
Table 2
Properties of various randomly packed aggregates including constituent size range s,
coordination number CN, filling factor f, and critical Rcrit and transition radius Rt.
Packing
BPCA
BAM1
BAM2
DC
SD
SD
SD
SD
Specification
3
qagg = 400 kg m
k=0
k=0
k=3
k=5
s (cm)
CN
f
Rcrit (m)
Rt (m)
1
1
1
1
1–10
0.1–10
1–10
1–10
2
4
6
2
2
2
2
2
0.2
0.3
0.4
0.4
0.2
0.2
0.2
0.2
0.3
0.4
0.4
0.2
0.2
0.2
0.2
0.3
3.1
3.6
3.7
1.7
0.5
0.5
1.0
1.9
Multiplying the Jacobi integral, Eq. (26), by m and choosing without
loss of generality const. = 0, we obtain the energy balance:
GmM
ð2Þ
ð2Þ
mð3X2 H2 Þ ¼ 2 mU þ EA ¼ 2
þ 2EA :
H
Solving Eq. (28) for the critical scale H we obtain the cubic equation
ð2Þ
H3 2 GM 2 EA
þ
H ¼ 0;
3 X2 3 mX2
ð29Þ
or more generally
H3 þ q1 þ q2 H ¼ 0:
area with radius a given by Eq. (A.4). This is the minimum number of
contacts a particle can make, independent of the actual packing style
of the aggregate. Adhesive interactions are generally dissipative, so
that we estimated a mechanical energy contribution due to adhesion
(see Eqs. (2) and (A)). Thus, we extend the gravitational potential of
the aggregate by the attraction due to adhesion to give
ð2Þ
EA
GM
U ¼ pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi þ
:
m
x2 þ y 2 þ z 2
ð28Þ
ð27Þ
ð30Þ
ð2Þ
With EA < 0 (adhesion binds particles) and thus q1 < 0 and q2 < 0
the general solution to this equation reads:
1=3
2
where q0
3q0
18
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
¼ 9q1 þ 81q21 þ 12q32 :
H¼
q 1=3
0
q2
ð31Þ
ð2Þ
In the absence of attractive surface forces, EA ¼ 0 and thus q2 = 0,
pffiffiffiffiffi
the critical scale is identical to the usual Hill scale H ¼ 3 q1 ¼
672
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
d 3 2M=ð3Mp Þ. We note that the classical Hill sphere reads
pffiffiffi
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
Htrue ¼ d 3 M=ð3Mp Þ, a factor of 3 2 1:3 smaller than H obtained
in this framework, and we therefore rescale our resulting H to
match the classical Hill scale. We define that an aggregate is stable
when k = H/(R + s0) P 1, i.e. if the center of mass of the outermost
single constituent is within the modified Hill sphere of the aggregate. We stress that this approach is generally valid even if the
aggregate has an internal size distribution; this would be expressed
ð2Þ
by a different effective particle size seff in EA . Together with Eqs. (2),
(29) and (31) the stability criterion reads
1
ffiffiffi
kðd; M; R; sÞ ¼ p
3
2ðR þ s0 Þ
" #
1=3
d
D 1 1=3
;
þ 2
3
X 9d
ð32Þ
where
M
d¼d
þ
Mp
3
sffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
2
3
1 D
3 M
d
;
Mp
3 X2
ð33Þ
ð2Þ
D¼
2 EA
A 5=3
s
:
¼
3 m
pq 0
ð34Þ
Fig. 13 shows the solution to Eq. (32) for various parameters
indicating the regime for potential growth (k P 1, white) as a function of aggregate radius and radial distance to the central planet.
Darker regions denote the percentage of Hill sphere over aggregate
size k, black corresponding to k < 0.8. Here, we use an aggregate
filling factor of f = 0.4 in accordance with our choice to model ring
particle aggregates as BAM2 configurations (and consistent with
the low-density objects observed in the rings (Porco et al.,
2007)). In the absence of adhesion the critical distance, i.e. where
the outermost particle of radius s0 falls just within the classical Hill
sphere of the aggregate, is shown as a dashed line for comparison.
As expected, the critical distance coincides with the k = 1 contour
towards larger aggregates, reaching the gravitational limit case.
Any white area underneath this threshold line represents the
parameter space where adhesive effects actively enhance the likelihood of growth. Comparing the left and right column of Fig. 13
shows how sensitive the process of aggregation is to surface free
energy – minimum (left) and maximum value (right). Aggregates
smaller than a meter in size are capable to accrete few cm-sized
particles as close as 1.8Rs which for Saturn corresponds to the
mid B ring region. Centimeter-sized and smaller particles may accrete onto aggregates until these reach almost 1 m in size about
anywhere in the rings. Adhesion is generally less effective for larger particles (if equal-sized). Interestingly, these aggregates may
still collect particles of up to 10 cm in the outer A and F ring regions
(bottom row of Fig. 13). Smaller particles have been found to stick
rather easily onto larger ones when colliding given that adhesive
forces are scaled by the effective mass of the colliding partners
(Albers and Spahn, 2006). This would suggest the easy accumulation of regolith layers beyond the potential growth indicated here.
Higher filling factors, direct proxies of an aggregate internal density, would naturally enable growth even closer to the planet. Here,
Mp = 5.6 1026 kg and Rs = 60,330 km, and denote Saturn’s mass
and reference radius.
4.2. Collision velocities
Next, we want to define the critical velocity needed for two colliding aggregates to fragment. Note, that our aim is to demonstrate
the importance of our results in order to explain the aggregate distribution in the rings and to motivate further work in this direction. However, a complex analysis (e.g. molecular dynamic
simulations) would be out of scope for this article. Thus, here we
consider just a simplified estimate and define that fragmentation
occurs when the kinetic energy of the two impacting aggregates
of radius R1 and R2 is large enough to split both collision partners
into two pieces
Ekin þ WðR1 Þ þ WðR2 Þ > 0:
ð35Þ
It should be noted that Eq. (35) has to be considered as a lower
threshold for low velocity impacts (mm/s to cm/s; i.e. g cs, g is
the relative velocity at collision and cs the sound speed of constituents materials). For instance, energy dissipation and reordering of
the constituents sensitively depend on the impact speed and may
cause strong inhomogeneities in the damage-ratio of an aggregate
(especially for g cs, see Housen et al., 1999; Asphaug, 1999). However, in case of dense planetary rings thermal impact speeds are
about five orders below the sound speed cs of the icy constituentmaterial. Furthermore, dissipative collisions are rather rare compared to restitutive ones (Brilliantov et al., 2009), which, in turn,
can lead to a constituent reordering (compaction) reducing porosity
– the latter being one reason for the inhomogeneities at impacts. In
this sense, we argue that the simplification introduced by using Eq.
(35) is fairly acceptable in case of dense planetary rings. In Section
2.2 we defined the work required to split an aggregate as
WðRÞ ¼ Q H ðRÞ MðRÞ
ð36Þ
w
where Q is defined by Eq. (19). The kinetic energy of the impact is
given by
Ekin ðM 1 ; M 2 Þ ¼
M eff 2
g ;
2
ð37Þ
where the effective mass is defined by Meff = M1M2/(M1 + M2).
Rewriting Eq. (35) considering R1 / M1=3
and R2 / M 1=3
we have
1
2
g 2 ðR1 ; R2 Þ > g 2frag ðR1 ; R2 Þ
h i
aA R21 þ R22 þ aG R51 þ R52
;
¼ 2 R31 þ R32
R31 R32
ð38Þ
which gives the critical velocity gfrag(R1, R2) when fragmentation is
the dominating in the outcome of collision. The coefficients aA
and aG are defined with Eqs. (19)–(21).
Fig. 14 shows the contours for different critical fragmentation
velocities gfrag(R1, R2). As one can see, for a given velocity complete
fragmentation is only possible for distinct region of sizes
Rmin ¼
8aA
g
< R < pffiffiffiffiffiffiffiffiffi ¼ Rmax :
g2
8aG
ð39Þ
Additionally, one should note that only agglomerates of similar size
can destroy each other, because otherwise the larger body would
survive. Using c = 0.2 N m1 instead of c = 0.74 N m1 would
decrease aA and thus Rmin by a factor of about 10. Likewise, the
maximum impact velocity for aggregation to occur gagg may be
found in a similar way. Aside from minimum and maximum sizes
in the rings one may obtain the ring particle size distribution by
using these results on threshold velocities in kinetic calculations
(see Section 5).
4.2.1. F ring
Now we will draw some conclusions for Saturn’s F ring based on
our preliminary considerations. As mentioned in the introduction
this thin, kinky ring is shepherded and perturbed by the moons Prometheus and Pandora. These perturbations of the moons induce
large relative velocities of the particles of the order m s1 (e.g. Winter et al., 2007), especially when the moons penetrate the F ring core
or the perturbed particle orbits start to intersect. On the other hand,
in the dense ring core, collisions can cause a conservation of induced
structures, leading to more gentle collisions with rather dm s1. This
has been observed in numerical simulations (Lewis et al., 2011)
673
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
γ = 0.20Nm-1, s0 = 1.0cm, f = 0.40
2.2
2.0
1.8
1.6
1.4
1.2
0.1
2.4
Radial Distance [ Rs=60,330km ]
Radial Distance [ Rs=60,330km ]
2.4
1.0
γ = 0.74Nm-1, s0 = 1.0cm, f = 0.40
2.2
2.0
1.8
1.6
1.4
1.2
0.1
10.0
1.0
Aggregate Radius [m]
γ = 0.20Nm-1, s0 = 5.0cm, f = 0.40
2.2
2.0
1.8
1.6
1.4
1.2
0.1
2.4
Radial Distance [ Rs=60,330km ]
Radial Distance [ Rs=60,330km ]
2.4
1.0
γ = 0.74Nm-1, s0 = 5.0cm, f = 0.40
2.2
2.0
1.8
1.6
1.4
1.2
0.1
10.0
1.0
Aggregate Radius [m]
γ = 0.20Nm-1, s0 = 10.0cm, f = 0.40
2.2
2.0
1.8
1.6
1.4
1.2
0.1
1.0
2.4
γ = 0.74Nm-1, s0 = 10.0cm, f = 0.40
2.2
2.0
1.8
1.6
1.4
1.2
0.1
10.0
Aggregate Radius [m]
80
10.0
Aggregate Radius [m]
Radial Distance [ Rs=60,330km ]
Radial Distance [ Rs=60,330km ]
2.4
10.0
Aggregate Radius [m]
1.0
10.0
Aggregate Radius [m]
85
90
95
100
Modified Hill Sphere / Aggregate Size [%]
Fig. 13. Growth regimes and maximum sizes. The dashed line denotes the critical distance in the absence of adhesion-classical Hill scale.
where even negative diffusion has been found. In unperturbed regions one should expect very small collision velocities below
cm s1. Furthermore, the ring has a large amount of lm-sized dust
particles (Showalter et al., 1992).
Fig. 15 shows the specific splitting energies Qw. Additionally, the
corresponding specific kinetic energies are plotted for different
collision velocities, where the crossing points with the Qw lines
correspond to the minimal and maximal R as given by Eq. (39).
Thus, the dust particles can adhere to agglomerates with radii of
cm to dm in the unperturbed regions (1 cm s1), but will be destroyed in the perturbed regions (dm s1 to m s1). Further growing will be limited because of ongoing fragmentation, and thus,
674
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
ronment tidal forces and impacts between the aggregates lead to
their disruption and formation of self-gravity wakes as a manifestation of a marginal gravitational instability. We will neglect the
self-gravity effects concentrating only on the effect of the adhesive
contacts. The collisional velocity between two aggregates depends
on two factors: (i) the thermal velocity vth of the ring particles and
(ii) on the relative velocity caused by the systematic shear motion
2/3X(R1 + R2) – where the factor 2/3 arouse from the average over
all possible collision geometries. Thus, we estimate the collisional
velocity of the order
2
g v th þ XðR1 þ R2 Þ:
3
Fig. 14. Contour plot of different critical fragmentation velocities gfrag(R1,R2) (see
Eq. (38)). Constituents with radii s = 1 cm, c = 0.74 N m1 and CN = 6 have been
used.
decimeter and tens of meter aggregates should be rare in the F ring.
Thus, km sized aggregates can be just formed due to compression
of ring material in the regions perturbed by the moons Prometheus
and Pandora (Beurle et al., 2010). If some of the aggregates do grow
above the maximum limit (Rmax > 100 m–1 km), they can grow
even further, but these are transient bodies and they are likely disrupted by a gravity encounter with Prometheus. Such km-sized
aggregates could be detected in the occultation data (Esposito
et al., 2008) and in ISS images (Beurle et al., 2010). Thus, in the F
ring we expect to observe a three-modal size distribution as
observed (Showalter et al., 1992) with micrometer-sized dust,
medium sized centimeter (or decimeter) agglomerates and a few
km or larger sized agglomerates.
4.2.2. Dense rings
For the inner dense rings the environment differs greatly from
that of the F ring. First of all the self-gravity of the constituents
does seem not to be able to form larger agglomerates; in this envi-
ð40Þ
The thermal velocity dominates the impacts of small aggregates,
whereas the shear is more important for collisions between larger
bodies. Simulations including only restitutive collisions and different particle sizes have shown a rather small dependence of the thermal velocity vth (Salo, 1992b), on the radius of the particles,
therefore, we will consider a size independent thermal velocity at
the moment. Substituting Eq. (40) into Eq. (38) and setting aG to
zero we can calculate the critical thermal velocity needed to split
both collision partners
vffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
u
u2aA R21 þ R22 R31 þ R32
2
u
XðR1 þ R2 Þ:
v th ðR1 ; R2 Þ > t
3
3
3
R1 R2
ð41Þ
In Fig. 16 the critical thermal velocity has been plotted for different
radii R1 and R2. One can see that above a critical radius, Rm, for the
smaller aggregate the larger collisional partner will be always fragmented. In order to calculate Rm we consider a collision of a smaller
aggregate with a larger one, R2 R1. Thus, this condition present in
Eq. (41) implies a maximal size for non-fragmenting collisions
R22 <
v2
2aA
R31 :
ð42Þ
Since the larger bodies contribute more to the thermal velocity, we
assume that thermal velocity is equal to the shear component
vth = 2/3X(R2). Therefore, the size of the largest bodies is determined by
Rmax ¼
3v th
2X
ð43Þ
and Eq. (42) gives a condition for the critical Rm doing g 2vth, thus
Fig. 15. The plot shows the specific splitting energies for the BAM2 aggregates with
different constituent sizes (c = 0.74 N m1 and CN = 6). Additionally, the kinetic
energies are plotted for different collision velocities. The crossing points correspond
to limits of the fragmentation zone, where fragmentation of both collision partners
can be observed.
Fig. 16. The plot shows the critical thermal velocities for fragmentation. Above a
critical radius Rm for the smaller collision partners fragmentation is always
occurring.
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
R1 > Rm ¼
9aA
2
8X
1=3
:
ð44Þ
An aggregate with radius smaller than Rm is not able to destroy a
larger one, whereas if its radius is larger than Rm, it will always
be able to destroy an aggregate larger itself. If an equilibrium size
distribution has been established in the rings, the number of collisions between particles smaller or larger than Rm became equal,
and thus, Rm can be related to the mean cross section of the partiqffiffiffiffiffiffiffiffiffi
cles in the ring, or better, Rm hR2 i. There is little known about
the agglomerate ‘‘constituents’’ sizes in Saturn’s rings. It should be
between the observed minimal observed ring particle radius of
around 1 cm (French and Nicholson, 2000) and the typical regolith
grain radius of around 10 lm observed on top of the ring particles
(Nicholson et al., 2008). The observed minimal ring particle aggregate radius is between 1 cm and 30 cm, that implies constituent radii larger than 0.1 mm and smaller than 1 cm for the considered
velocity range of 1 mm s1 and 3 mm s1 using our estimates from
above. These constituent sizes will deliver reasonable Rmin in the
expected velocity range. However, one should note, if the thermal
velocity of the ring particles exceeds 3 mm s1 constituents of tens
of micrometer deliver good result for Rmin, around 14 cm. While the
minimal agglomerate radius Rmin is sensitive to the constituent size
and velocity range, the ‘‘mean’’ radius, Rm, is changing less significantly for different velocities and constituent sizes. The calculated
maximal agglomerate radii are between 8 and 23 meters (for velocities between 1 and 3 mm s1) which is well in the range of the expected 5–20 m. These estimates reproduce the correct order of
magnitude for the size range and demonstrate the validity of the
implications of the results obtained in this work. In our discussion
we neglected the additional effect of self gravity. However, the main
population of the particles (centimeter to tens of meter sized) is
dominated by adhesive attraction. Nevertheless, gravity will take
over for the largest ring aggregates. Nevertheless, we calculated this
particle class on base of the assumed thermal velocity in the rings,
so that Rmax can also be interpreted as the size of the largest
gravitational bound aggregates which may also have the size of
the order of the Toomre wavelength (Salo, 1995).
5. Discussion
In this paper we have studied the role of contact forces (adhesion) for the aggregation and fragmentation of aggregates in a granular gas (planetary rings) by calculating their specific (per mass)
binding energies Qw in relation to their gravitational self-energy.
We have investigated several types of aggregates, including regular
packed (fcc, bcc) and randomly build ballistic aggregates (BPCA),
also including a constrained density (DC) as well as reordering of
the constituents (BAM1, BAM2). One should note that the BPCA
and fcc aggregates, which have filling factors between 0.2 and
0.74 and coordination numbers between 2 and 12, represent two
limit cases for a realistic aggregate. We can say that the frequent collisions in planetary rings, which pack and disintegrate particles, lead
to neither organized nor very densely packed aggregates. Therefore,
amorphous packing can better represent the aggregates formed in
the ring environment as concluded from Cassini observations. We
have been able to determine resistances of granular aggregates between strength- and gravity regimes as observed in material sciences or in asteroidal studies. We have shown that early in their
formation, mostly the contact forces among the constituents support small agglomerates, and adhesion is the major player for their
resistivity corresponding to the strength regime; whereas larger
boulders are held together by their mutual gravity, gravitational
regime. The energy necessary to disrupt or erode an aggregate is a
function of the aggregate size, in terms of energy per mass (specific
675
energy) we have Qw(R). In the strength regime Qw(R) is inversely
proportional to the aggregate size (Qw(R) / 1/Rf) and reaches its
minimum before the gravitational specific binding energy dominates (Q(R) / R2, cf. Fig. 2). The exponent f depends on the damage
ratio of the target aggregate, it assumes values between 1 and 0,
and is related to the size distribution of fragments (and to the exponent p defined in Section 2.2): f = 1 corresponds to splitting the
aggregate into two equally sized fragments, whereas f = 0 implies
total fragmentation into all individual constituents as the specific
fragmentation energy transforms into the specific adhesive binding
energy Qw(R) ? Q which is independent of the aggregate size R.
From this work we conclude that the transition between the
strength and the gravitational regimes is located along Q line, all
others measurement for Qw are intermediate stages of rupture. In
planetary rings ongoing growth is counteracted by fragmenting collisions and tidal pull. In general tidal forces or centrifugal forces of
spinning aggregates can disrupt aggregates, for example. The centrifugal acceleration, given by /RX2, exerted by the central planet
increases linearly with aggregate size. The acceleration on the constituents due to the spin rate x is proportional to Rx2, and at
Rx2 RX2 the body can be weakened or disrupted. For the dense
rings of Saturn both effects centrifugal and spin acceleration are
not able to disrupt an icy aggregate smaller than kilometer in size
(assuming s0 = 1 cm, q = 400 kg m3, c = 0.74 N m1). The adhesion
alone provides these bodies a resistance strong enough to withstand
both accelerations. This approach follows the discussion presented
by Scheeres et al. (2010) for a rotating rubble pile asteroid. Only mutual collisions between the aggregates are capable to change the
sizes between the composite ring-particles. This may occur either
through aggregation for impacts at low velocities, or alternatively,
due to fragmentation at higher collision velocities. Collision dynamics and resistivity of the aggregates determine the corresponding
velocity thresholds gagg and gfrag, where gfrag was estimated in Section 4.2. Both borders are crucial for the generalized kinetics of
dense planetary rings laid by Spahn et al. (2004). We have shown
that knowledge of the critical fragmentation velocity provides us
with information about the agglomerate size distribution through
the minimal and maximal aggregate radius. The difference between
both velocities gagg gfrag is determined mainly by the dissipation
during collisions among aggregate constituents. This dissipation
arises from viscous deformations and from the fact that both formation and destruction of an individual contact are irreversible
processes.
The Maxwellian velocity dispersion f(g) shown in Fig. 17 is a possible impact velocity distribution of the ring particles (neglecting
systematic motions, see also Goldreich and Tremaine, 1978). The
lower end and the upper tail of this distribution mark the velocity
ranges where aggregation and fragmentation occur. The relatively
wide gap between aggregation and fragmentation emphasizes the
importance of collisional restitution for the majority of the collisions. The influence of the thermal velocity vth on the balance of fragmentation and coagulation has already been discussed (see Section
4.2.2). However, the size distribution of the ring particles as well as
the fragmentation and coagulation processes themselves influence
the evolution of the particle velocity distribution. We have not
investigated this effect in this article, but it would be worthwhile
to do it in future. Molecular dynamics simulations – including integration of the collision dynamics of individual constituents of two
colliding aggregates – would be necessary in order to determine
more precisely the domains of fragmentation, restitution, and aggregation. However, our results provide sufficient information in order
to undertake kinetic calculations for the evolution of the size distribution. As shown in Section 4.2 one may derive expressions for the
aggregation and fragmentation speeds gagg < g < gfrag. For two colliding aggregates of the same size the fragmentation velocity is inversely proportional to the aggregate size, gfrag / R1, the same relation
676
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
contact forces like adhesion and found a qualitative agreement to
laboratory results. We have also shown that aggregate resistivity
actively determines the size distribution in planetary rings. In the
case of Saturn’s rings we estimate the upper size cut-off to be on
the order of tens of meters which is in quantitatively good agreement with observations. Further, aggregate sizes, resistivity, and
both aggregation and fragmentation threshold velocities provide
direct input for parameters crucial in undertaking kinetic studies
of the size and velocity distributions of granular systems such as
planetary rings.
Acknowledgments
Fig. 17. Maxwellian velocity distribution f(g) of the collisions velocities of the
aggregates. Note, impact speeds of the range of mm s1 up to cm s1 are expected in
Saturn’s rings.
should also hold for gagg. Once a size distribution has been established fragmentation and aggregation rates will minimize. This
would happen when the mean kinetic energy / v 2th approaches the
specific binding energy Qw. Therefore, we arrive at the hypothesis
that the mean thermal velocity evolves dynamically as vth / R1/2.
Other velocity distributions which could follow from equipartition
where vth / R3/2 or the assumption of a size independent velocity
distribution, would have a rather too steep or too shallow gradient
leading to enhanced aggregation/fragmentation rates. We propose
to adapt the velocity distribution according to the size dependence
of Qw. Similar phenomena are known in physics, for example the
self-organized criticality (SOC, Bak et al., 1987). An example of a
SOC is the triggering of a series of avalanches when steadily dumping
sand on top of a sand pile. The avalanches guarantee that the angle of
response at the pile-edges remains within a narrow range around a
self-organized critical value. The slightest disturbances can generate
new, even arbitrary small avalanches that maintain the critical angle. Finally we want to consider a large aggregate in an ensemble
of individual constituents with a mean impact velocity gm, where
in a certain case gm vth. The aggregate will grow if the kinetic energy of the constituent is smaller than the specific contact energy,
Q Qw(R) for a body of radius R, otherwise higher kinetic energies
could lead to a split off of bound constituents. The critical velocity
gc is defined by g 2c =2 ¼ Q Q H and is an unstable fix point where
the aggregate does neither grow nor shrink. Thus, the aggregate
would grow or shrink if gm < gc or gm > gc, respectively. This is analog
to droplet formation in a supersaturated gas (clouds) known from
equilibrium thermodynamics which leads to a similar relation with
ldrop + (2m/q)(r/R) lgas = 0. Here l denotes the chemical potential of droplet and gas together with its surface tension r/R. Here
ldrop lgas corresponds to g 2c =2 Q and the surface tension to Qw.
Royer et al. (2009) have shown that for adhering granular particles
such a surface tension does also exist. Our numerically-designed
aggregates already contain this energy part that is easily demonstrated by the investment of energy in order to split an aggregate
(to create new surfaces) owing to the contact adhesion. Of course,
this analogy is quite formal, because in the case of the ring aggregate
ensemble dissipation leads to a quick cooling (T ? 0) of the aggregate so that an equal temperature for all phases is not given here.
6. Conclusions
We have analytically and numerically studied the specific binding energies of aggregates held together by gravity and surface
The DAAD A06/20714 supported A.H.F.G. N.A. acknowledges
support by the Cassini–Huygens project. We gratefully thank
M. Sremčević for contributing the idea to introduce the concept
of a modified Hill sphere presented in Section 4.1. We further
acknowledge both his helpful discussions and active support
regarding numerical procedures.
Appendix A. Energy of an adhesive, elastic contact
The energy required to separate two particles s1 and s2 – the
energy of one ‘‘adhesive bond’’ – comprises both the mechanical
(elastic) energy of particle deformation uelas and the non-mechanical (adhesive) energy uadd. Following Brilliantov et al. (2007) it
may be shown that for the equilibrium contact uelas reads
uelas ¼
a5
15Ds2eff
¼
65=3 5 2 5 4 1=3
p D c seff ;
15
ðA:1Þ
where seff = s1s2/(s1 + s2) denotes the effective particle size, c twice
the surface free energy c0. The bulk material constants Young’s
modulus Y and Poisson ratio m have been combined into a single
constant D = 3(1 m2)/(2Y), implicitly assuming that all particles
are made of the same material. To put the non-mechanical adhesive
energy into mechanical context, we need to consider the interactions between the two particles on the microscopic, interatomic
level. We assume that these interact by the Lennard–Jones potential
(the particular form of the inter-atomic potential is not important)
" 12
r
uij ¼ 4e
rij
6 #
r
;
r ij
ðA:2Þ
where e characterizes the interaction strength, r is the characteristic
size of particles atoms and rij is the interatomic distance between the
ith atom of the test particle and jth atom of the particle of the aggregate. Then the interaction energy between the two particles is equal
to the sum over all atoms i and j, which may be approximated by the
continuum integral over particles’ material. After rigorous analysis
we find
uadh ¼ Z
2s1
dz1
d
Z 2p
0
Z
d
2s2
dz2
Z
aðz1 Þ
r 1 dr 1
0
Z
aðz2 Þ
r2 dr2
0
8per q
d/ 3 :
2
ðz1 þ z2 Þ þ r 21 þ r 22 2r1 r2 cos /
6
2
}
ðA:3Þ
Here q} is the number density of atoms of the particle material, z1
and z2 are the distances (in normal direction) from the plane of contact, where z1 = z2 = 0, d = 21/6 r is the equilibrium distance between
atoms, and a1/2(z) is the shape of the deformed spheres (that is, of
our particles) around the contact zone. We further assume that
the inter-particle contact corresponds to the equilibrium contact
with a(z = 0) = aeq given by (Brilliantov et al., 2007)
a3eq ¼ 6pcDs2eff :
ðA:4Þ
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
The integration in Eq. (A.3) is performed over the total particle volume (s1 and s2 are the particle radii of a pair in contact which define
seff). To obtain an analytical estimate of the integral in Eq. (A.3) we
approximate the shape of the deformed particle a(z) with the
relation,
ak ðzk Þ2 ¼ a2 þ s2k ðsk zk Þ2
for
k ¼ 1; 2:
ðA:5Þ
a2k ðzk
This approximation satisfies ak(zk = 0) = aeq and
¼ sk Þ ¼ a2eq
2
2
þsk sk , since sk aeq, that is at the heights zk = sk the deformation
vanishes. If we further assume that the equilibrium contact area
pa2eq is much larger than the atomic area, pr2, we may integrate
over r1 and over r2 with the acceptable accuracy from zero to infinity. While keeping only linear terms in the expansion in small
parameter d/s1/2 and assuming for simplicity that s1 = s2 = s we find
after rigorous calculations
uadh ¼ AH a2eq
"
12D20
1þ
#
D0 3D0 s
þ 2 ;
aeq
2s
ðA:6Þ
where D0 = 2d = 2 21/6r is the equilibrium distance between the
centers of atoms of the two surfaces and
AH ¼ 4er6 p2 q2
ðA:7Þ
is the Hamaker constant (Israelachvili, 2011). Taking into account
that the Hamaker constant is related to the surface tension c0 as
(Israelachvili, 2011)
c0 ¼
AH
24pD20
ðA:8Þ
;
and that the adhesive energy c, introduced above, is twice the surface tension, c = 2c0 (Brilliantov et al., 2007), we finally obtain
"
uadh ¼ pa2eq c 1 þ
#
D0 3D0 s
þ 2 :
aeq
2s
ðA:9Þ
In the limit of D0/s ? 0 this is consistent with the simple estimate
pca2eq as follows from thermodynamics. Thus,
ð2Þ
EA ¼ uadh þ uelas ¼ pca2eq þ
a5eq
15Ds2eff
:
ðA:10Þ
Using Eq. (A.4) for aeq, we may write
ð2Þ
EA ¼ 62=3 5 2 5 4 1=3 e 4=3
p D c seff
¼ Aseff ;
5
ðA:11Þ
e 4:45ðD2 c5 Þ1=3 with ½ A
e ¼ N m1=3 .
where A
References
Albers, N., Spahn, F., 2006. The influence of particle adhesion on the stability of
agglomerates in Saturn’s rings. Icarus 181, 292–301.
Asphaug, E., 1999. Survival of the weakest. Nature 402, 127–128.
Bak, P., Tang, C., Wiesenfeld, K., 1987. Self-organized criticality: An explanation of
the 1f noise. Phys. Rev. Lett. 59, 381–384.
Barbara, J.M., Esposito, L.W., 2002. Moonlet collisions and the effects of tidally
modified accretion in SATURN’s f ring. Icarus 160, 161–171.
Benz, W., Asphaug, E., 1999. Catastrophic disruptions revisited. Icarus 142, 5–20.
Beurle, K., Murray, C., Williams, G., Evans, M., Cooper, N., Agnor, C., 2010. Direct
evidence for gravitational instability and moonlet formation in Saturn’s rings.
Astrophys. J. 718, L176–L180.
Bridges, F.G., Hatzes, A., Lin, D.N.C., 1984. Structure, stability and evolution of
Saturn’s rings. Nature 309, 333–335.
Brilliantov, N.V., Spahn, F., Hertzsch, J.-M., Pöschel, T., 1996. Model for collisions in
granular gases. Phys. Rev. E 53, 5382–5392.
Brilliantov, N.V., Albers, N., Spahn, F., Pöschel, T., 2007. Collision dynamics of
granular particles with adhesion. Phys. Rev. E 76 (5), 051302.
Brilliantov, N.V., Krapivsky, P., Schmidt, J., Spahn, F., 2009. On the distribution of
particle sizes in Saturn’s rings. In: European Planetary Science Congress, 2009,
p. 656.
Chokshi, A., Tielens, A.G.G.M., Hollenbach, D., 1993. Dust coagulation. Astrophys. J.
407, 806–819.
677
Colwell, J.E., Esposito, L.W., Sremčević, M., 2006. Self-gravity wakes in Saturn’s a
ring measured by stellar occultations from Cassini. Geophys. Res. Lett. 33,
L07201.
Colwell, J.E., Esposito, L.W., Sremčević, M., Stewart, G.R., McClintock, W.E., 2007.
Self-gravity wakes and radial structure of Saturn’s B ring. Icarus 190, 127–
144.
Colwell, J.E., Cooney, J.H., Esposito, L.W., Sremčević, M., 2009. Density waves in
cassini uvis stellar occultations – 1: The cassini division. Icarus 200, 574–580.
Davis, D.R., Weidenschilling, S.J., Chapman, C.R., Greenberg, R., 1984. Saturn ring
particles as Dynamic Ephemeral Bodies. Science 224, 744–747.
Dohnanyi, J.S., 1969. Collisional model of asteroids and their debris. J. Geophys. Res.
74, 2531–2554.
Dominik, C., Tielens, A.G.G.M., 1997. The physics of dust coagulation and the
structure of dust aggregates in space. Astrophys. J. 480, 647–673.
Esposito, L.W., Meinke, B.K., Colwell, J.E., Nicholson, P.D., Hedman, M.M., 2008.
Moonlets and clumps in Saturn’s f ring. Icarus 194, 278–289.
French, R.G., Nicholson, P.D., 2000. Saturn’s rings II: Particle sizes inferred from
stellar occultation data. Icarus 145, 502–523.
French, R.G., Salo, H., McGhee, C.A., Dones, L., 2007. HST observations of azimuthal
asymmetry in Saturn’s rings. Icarus 189, 493–522.
Goldreich, P., Tremaine, S.D., 1978. The velocity dispersion in Saturn’s rings. Icarus
34, 227–239.
Gundlach, B., Kilias, S., Beitz, E., Blum, J., 2011. Micrometer-sized ice particles for
planetary-science experiments – I: Preparation, critical rolling friction force,
and specific surface energy. Icarus 214, 717–723.
Güttler, C., Blum, J., Zsom, A., Ormel, C.W., Dullemond, C.P., 2010. The outcome of
protoplanetary dust growth: Pebbles, boulders, or planetesimals? I: Mapping
the zoo of laboratory collision experiments. Astron. Astrophys. 513, A56.
Hatzes, A.P., Bridges, F., Lin, D.N.C., Sachtjen, S., 1991. Coagulation of particles in
Saturn’s rings – Measurements of the cohesive force of water frost. Icarus 89,
113–121.
Hedman, M.M. et al., 2007. Self-gravity wake structures in Saturn’s a ring revealed
by cassini VIMS. Astrophys. J. 133, 2624–2629.
Holsapple, K.A., 2009. On the ‘‘strength’’ of the small bodies of the Solar System: A
review of strength theories and their implementation for analyses of impact
disruptions. Planet. Space Sci. 57, 127–141.
Housen, K.R., Holsapple, K.A., 1990. On the fragmentation of asteroids and planetary
satellites. Icarus 84, 226–253.
Housen, K.R., Holsapple, K.A., Voss, M.E., 1999. Compaction as the origin of the
unusual craters on the asteroid Mathilde. Nature 402, 155–157.
Israelachvili, J., 2011. Intermolecular and Surface Forces. Academic Press.
Johnson, K.L., Kendall, K., Roberts, A.D., 1971. Surface energy and the contact of
elastic solids. Proc. R. Soc. Lond. Ser. A, Math. Phys. Sci. 324 (1558), 301–313.
Kolokolova, L., Kimura, H., Kiselev, N., Rosenbush, V., 2007. Two different
evolutionary types of comets proved by polarimetric and infrared properties
of their dust. Astron. Astrophys. 463, 1189–1196.
Lewis, M., Stewart, G., Leezer, J., West, A., 2011. Negative diffusion in planetary rings
with a nearby Moon. Icarus 213, 201–217.
Lobanov, M., Bogatyreva, N., Galzitskaya, O., 2008. Radius of gyration as an indicator
of protein structure compactness. Mol. Biol. 42 (4), 623–628.
Longaretti, P., 1989. Saturn’s main ring particle size distribution: An analytic
approach. Icarus 81 (1), 51–73.
Love, S.G., Ahrens, T.J., 1996. Catastrophic impacts on gravity dominated asteroids.
Icarus 124, 141–155.
Marouf, E., Leonard Tyler, G., Zebker, H., Simpson, R., Eshleman, V., 1983. Particle
size distributions in Saturn’s rings from Voyager 1 radio occultation. Icarus 54
(2), 189–211.
Moreno-Atanasio, R., Ghadiri, M., 2006. Mechanistic analysis and computer
simulation of impact breakage of agglomerates: Effect of surface energy.
Chem. Eng. Sci. 124, 2476–2481.
Mrafko, P., Duhaj, P., 1974. Analysis of an aggregate of hard spheres. Phy. Status
Solidi Appl. Res. 23, 583–589.
Mukai, T., Ishimoto, H., Kozasa, T., Blum, J., Greenberg, J.M., 1992. Radiation pressure
forces of fluffy porous grains. Astron. Astrophys., 315–320.
Murray, C.D., Dermott, S.F., 2000. Solar System Dynamics. Cambridge University
Press.
Murray, C.D. et al., 2005. How Prometheus creates structure in Saturn’s F ring.
Nature 437, 1326–1329.
Nicholson, P.D., Hedman, M.M., Clark, R.N., Showalter, M.R., Cruikshank, D.P., Cuzzi,
J.N., Filacchione, G., Capaccioni, F., Cerroni, P., Hansen, G.B., Sicardy, B., Drossart,
P., Brown, R.H., Buratti, B.J., Baines, K.H., Coradini, A., 2008. A close look at
Saturn’s rings with cassini VIMS. Icarus 193, 182–212.
Perrine, R.P., Richardson, D.C., Scheeres, D.J., 2011. A numerical model of cohesion in
planetary rings. Icarus 212, 719–735.
Porco, C., Thomas, P., Weiss, J., Richardson, D., 2007. Saturn’s small inner satellites:
Clues to their origins. Science 318 (5856), 1602–1607.
Richardson, D.C., 1995. A self-consistent numerical treatment of fractal aggregate
dynamics. Icarus 115, 320–335.
Robbins, S.J., Stewart, G.R., Lewis, M.C., Colwell, J.E., Sremčević, M., 2010. Estimating
the masses of Saturn’s A and B rings from high-optical depth N-body
simulations and stellar occultations. Icarus 206, 431–445.
Royer, J. et al., 2009. High-speed tracking of rupture and clustering in freely falling
granular streams. Nature 459 (7250), 1110–1113.
Salo, H., 1992a. Gravitational wakes in Saturn’s rings. Nature 359, 619–621.
Salo, H., 1992b. Numerical simulations of dense collisional systems – II: Extended
distribution of particle sizes. Icarus 96, 85–106.
678
A.H.F. Guimarães et al. / Icarus 220 (2012) 660–678
Salo, H., 1995. Simulations of dense planetary rings – III: Self-gravitating identical
particles. Icarus 117, 287–312.
Scheeres, D.J., Hartzell, C.M., Sánchez, P., Swift, M., 2010. Scaling forces to asteroid
surfaces: The role of cohesion. Icarus 210, 968–984.
Seipenbusch, M., Toneva, P., Peukert, W., Weber, A.P., 2007. Impact fragmentation of
metal nanoparticle agglomerates. Part. Part. Syst. Char., 193–200.
Shen, Y., Draine, B.T., Johnson, E.T., 2008. Modeling porous dust grains with ballistic
aggregates – I: Geometry and optical properties. Astrophys. J. 689, 260–275.
Shen, Y., Draine, B.T., Johnson, E.T., 2009. Modeling porous dust grains with ballistic
aggregates – II: Light scattering properties. Astrophys. J. 696, 2126–2137.
Showalter, M.R., Pollack, J.B., Ockert, M.E., Doyle, L.R., Dalton, J.B., 1992. A
photometric study of Saturn’s F Ring. Icarus 100, 394–411.
Spahn, F., Albers, N., Sremčević, M., Thornton, C., 2004. Kinetic description of
coagulation and fragmentation in dilute granular particle ensembles. Europhys.
Lett. 67, 545–551.
Sremčević, M., Schmidt, J., Salo, H., Seiß, M., Spahn, F., Albers, N., 2007. A belt of
moonlets in Saturn’s a ring. Nature 449 (7165), 1019–1021.
Tiscareno, M.S. et al., 2006. 100-metre-diameter moonlets in Saturn’s a ring from
observations of propeller structures. Nature 440, 648–650.
Tiscareno, M., Burns, J., Nicholson, P., Hedman, M., Porco, C., 2007. Cassini imaging
of Saturn’s rings – II: A wavelet technique for analysis of density waves and
other radial structure in the rings. Icarus 189 (1), 14–34.
Vold, M., 1959. A numerical approach to the problem of sediment volume 1. J.
Colloid Sci. 14 (2), 168–174.
Wada, K., Tanaka, H., Suyama, T., Kimura, H., Yamamoto, T., 2008. Numerical
simulation of dust aggregate collisions – II: Compression and disruption of
three-dimensional aggregates in head-on collisions. Astrophys. J. 677, 1296–
1308.
Weidenschilling, S.J., Chapman, C.R., Davis, D.R., Greenberg, R., 1984. Ring particles
– Collisional interactions and physical nature. In: Greenberg, R., Brahic, A. (Eds.),
Planetary Rings (A85-34401 15-88), University of Arizona Press, Tucson, AZ, pp.
367–415.
Winter, O.C., Mourao, D.C., Giuliatti Winter, S.M., Spahn, F., da Cruz, C., 2007.
Moonlets wandering on a leash-ring. Mon. Not. R. Astron. Soc.: Lett. 380 (1),
L54–L57.
Zebker, H.A., Marouf, E.A., Tyler, G.L., 1985. Saturn’s rings – Particle size
distributions for thin layer model. Icarus 64, 531–548.