Raghavendran D. Nagarj
advertisement

AN ABSTRACT OF THE THESIS OF
Raghavendran D. Nagarj
for the degree of Master of Science in Industrial Engineering
presented on 8 December, 2003.
Title: Linking Equations for the Analysis of a Serial Automated Workstation System.
Abstract
Redacted for privacy
David S. Kim
In this research, an analytical model for analyzing a production line consisting of a series
of automated workstations with infinite buffers is developed. Automated workstations are
assumed to have deterministic processing times, and independent exponentially
distributed operating time between failures and repair times. The analytical model starts
with existing results from a Markov chain model of two automated workstations in series,
where analytical expressions are developed for the average number of jobs in the second
workstation and its queue. This research focuses on the development of a set of linking
equations that can be used to analyze larger systems using a two workstation
decomposition approach. These linking equations utilize probabilities computed in the
two-workstation Markov chain model to compute workstation parameters for a single
workstation such that the first two moments of the inter-departure process from the twoworkstation system and the single workstation are the same. Simulations of a number of
different 3-workstation and 10-workstation systems were carried out employing a range
of workstation utilizations and processing time coefficients of variation. The results from
these simulations were compared with those calculated with the analytical model and
various two-parameter GJ/G/l approximations and linking equations present in the
literature. The analytical model resulted in an average absolute percentage difference of
less than 5% in the systems studied, and performed much better than general twoparameter GIG/i approximations. The analytical model was also robust in ranking the
queues in the order of the average number ofjobs present in the queues.
Linking Equations for the Analysis of a Serial Automated Workstation System
by
Raghavendran D. Nagarajan
A THESIS
submitted to
Oregon State University
in partial fulfillment of
the requirements for the
degree of
Master of Science
Presented December 8, 2003
Commencement June 2004
Master of Science thesis of Raghavendran D. Nagarajan
presented on December 8, 2003.
Redacted for privacy
Major Professor, representing Industrial and Manufacturing Engineering
Redacted for privacy
Head of Industrial and Manufacturing Engineering
Redacted for privacy
Dean of the Graduate School
I understand that my thesis will become part of the permanent collection of Oregon State
University libraries. My signature below authorizes release of my thesis to any reader
upon request.
Redacted for privacy
Raghavendran D. Nagarajan, Author
TABLE OF CONTENTS
Pige
Introduction
2
3
1
1.1
General objectives and motivation
1
1.2
System Description
1
1.3
General Approach
2
1.4
Organization of the document
3
Literature Review
2.1
GJIG/1 Approximations
4
2.2
Departure Process Approximations
8
2.3
Serial Automated Systems with Finite Buffers
9
Analytical Model
3.1
11
Finding Markov Chain Failure and Repair Probabilities
3.1.1
3.1.2
3.1.3
4
4
First moment of the processing time
Second moment of the processing time
Failure and repair probabilities for a WS
13
14
14
16
3.2
Distribution of inter-departure times from WS 2
18
3.3
Information from the Markov chain model
27
Evaluation of Methodology
30
4.1
Simulation of 3-workstation systems
31
4.2
Simulation of 10-workstation systems
35
TABLE OF CONTENTS (CONTiNUED...)
5
6
Results
5.1
Results for 3-workstation systems
39
5.2
Results for 10-workstation systems
46
5.3
Ranking workstations
49
Conclusion
50
Bibliography
51
Appendices
54
Appendix A Markov chain model for two automated workstations in series
55
Appendix B
Input data for simulation of 3-workstation system
68
Appendix C
Input data for simulation of 10-workstation system
80
Appendix D
First two moments of the inter-departure time distribution
87
LIST OF FIGURES
Figure
Page
1
The two-workstation decomposition approach
11
2
Results for the 3_WSCV1L system
39
3
Results for the 3_WSCV2L system
40
4
Results for the 3_WSCV3_L system
41
S
Results for the 3_WS_CV4_L system
41
6
Results for the 3_WS_CV5_L system
42
7
Results for the 3_WS_CV1H system
42
8
Results for the 3_WS_CV2_H system
43
9
Results for the 3WSCV3_H system
43
10
Results for the 3_WS_CV4H system
44
11
Results for the 3WS_CV5_H system
44
12
Results for the 3_WS_Dis system
45
13
Results for the 3WS_Sim system
45
14
Results for the 1OWS_CV1 system
46
15
Results for the 1 0_WS_CV2 system
46
16
Results for the 1 0_WSCV3 system
47
17
Results for the 10_WSCV4 system
47
18
Results for the 1 0_WS_CV5 system
48
19
Results for the 10_WS_CVO5 system
48
LIST OF TABLES
Table
The different factors and the levels for the simulations
31
2
Description of the different 3-workstation systems simulated
34
3
Additional 3-workstation systems simulated
35
4
Description of the different 10-workstation systems simulated
36
5
List of all the different theoretical models
37
6
Number of cases of incorrect workstation ranks
for 10-workstation systems
49
LIST OF APPENDIX FIGURES
Figure
Al
State transition diagram for the Markov chain model
58
A2
Macrostate Markov chain model
59
A3
Finding the microstate Markov chain transition probabilities
61
LIST OF APPENDIX TABLES
Table
Page
Bi
Input Data for the 3_WS CV1_L system
69
B2
Input Data for the 3_WS_CV2_L system
70
B3
Input Data for the 3_WS_CV3_L system
71
B4
Input Data for the 3_WS_CV4_L system
72
B5
Input Data for the 3_WS_CV5_L system
73
B6
Input Data for the 3_WS_CV1_H system
74
B7
Input Data for the 3WSCV2_H system
75
B8
Input Data for the 3_WS_CV3_H system
76
B9
Input Data for the 3_WS_CV4_H system
77
BlO
Input Data for the 3_WS_CV5_H system
78
Bi 1
Input Data for the 3_WS_Dis system
79
B12
Input Data for the 3_WS_Sim system
79
Cl
Input Data for the 1OWS_CV1 system
81
C2
Input Data for the 10_WS_CV2 system
82
C3
Input Data for the 10_WS_CV3 system
83
C4
Input Data for the 10_WS_CV4 system
84
C5
Input Data for the IQWS_CV5 system
85
C6
Input Data for the 1 0_WS_CVO5 system
86
Notation
Expected value of a random variable
Var[.]
Variance of a random variable
WS
WorkStation
f
Failure probability of a WS
r
Repair probability of a WS
f,
Failure probability of WS i, = 1, 2, 3...
Repair probability of WS i, i = 1, 2, 3...
N
Number of workstations in series in a system being considered
MTBF
Mean Time Between Failure for WS i
MTTR
Mean Time To Repair for WS i.
P
Total time spent by ajob in a WS (processing time)
S,
Processing rate of WS i when it is up
u,
Utilization of WS i
u
Utilization of any workstation
Coefficient of Variation (CV) of processing times of workstation i
Ca,
Coefficient of Variation (CV) of inter-arrival times to workstation i
Cd
Coefficient of Variation (CV) of inter-departure times from workstation i
0a2
Variance of inter-arrival times to a workstation
0e2
Variance of service time ofajob on a workstation
Arrival rate ofjobs to a workstation
p
Service rate ofjobs at a workstation
W
Expected waiting time of ajob in a queue
Linking Equations for the Analysis of a Serial Automated Workstation System
1. INTRODUCTION
1.1 General Objectives and Motivation
Queuing models have applications in the perfonnance evaluation of a variety of systems
like communication networks, call centers and production lines. The focus of this
research is directed towards a specific type of queuing system. This system is a series of
workstations in which the work times of the individual servers (or workstations) can be
assumed to be equal and deterministic. The significant randomness in the behavior of
such machines comes from the random downtimes (time between workstation failures)
and random repair times, both of which are normally assumed to be independent and
exponentially distributed.
In the past, researchers have used this queuing system to
model the behavior of a series of automated workstations. The objective of this research
is to develop an analytical model to analyze a system consisting of an arbitrary number of
automated workstations in series. The use of two-moment GJIG/1 approximations, which
seems to be a simple and a popular analytical approach for the analysis of such systems,
results in potentially large errors for system performance measures (e.g., the average
number of jobs in the system), especially when the coefficient of variation of processing
times exceeds 1.5 (Hopp and Spearman, 1995). This provides the motivation for deriving
an accurate, analytical method for analyzing such systems. A description of the exact
system which has been studied in this research is given below.
1.2 System Description
The system studied here is a production line consisting of a series of automated
workstations, numbered from 1 through N. The buffer size between workstations is
assumed to be infinite and the first workstation (WS 1) is assumed to have an unlimited
supply of jobs. The workstations process a single job at a time and are assumed to have
2
deterministic, unit work times. The time between failure and the time to repair for each of
the workstations are assumed to be independent and exponentially distributed. The
performance measure of interest is the average number ofjobs in each workstation and its
input queue. Knowing this and applying Little's Law the total time a job spends in each
workstation and its input queue can be found.
1.3 General Approach
The general approach used in this research is to model the continuous time, discrete event
system described as a discrete time system. In prior research (Kim (2003)) a Markov
chain model of a 2-workstation system has been developed, and analytical results for the
average number of jobs in the second workstation and its queue have been derived (see
Appendix A). This research uses the two-workstation Markov chain model as a building
block to analyze systems containing more than two workstations. The general approach is
to use a two-workstation decomposition approach, which involves analysis of the system
workstation by workstation, and the approximate representation of the system feeding an
input buffer as a single "aggregate" workstation. The main challenge in successfully
using such an approach is estimating the departure process from a workstation which is
occasionally starved. The analysis in this research begins by utilizing the stationary
probabilities from the two-workstation Markov chain model to derive the probability
distribution of the inter-departure times from the second workstation. The probability
distribution of inter-departure times enables us to calculate the first two moments of the
inter-departure times. This, in turn leads to a two-moment 2-workstation decomposition
approach. The equations derived for the mean and variance of the workstation interdeparture times are referred to as "linking equations". The linking equations derived in
this research enable the calculation of the parameters of the aggregate workstation
described above.
1.4 Organization of document
The rest of this document is organized in as follows. In chapter 2, a review of the
literature describing approaches used in the analysis of systems similar to the one
described here is given. In chapter 3, the linking equations that enable the calculation of
parameters for an aggregate workstation are derived. In chapter 4, the methodology used
in evaluating the performance of the analytical model using discrete event simulation is
described. In chapter 5, the results of the simulations carried out on a number of
automated workstation systems are presented. A comparison of the results obtained from
the analytical model presented in this research with some of those given in the literature
is also presented in this chapter.
4
2. LITERATURE REVIEW
The most common analytical approach for the analysis of a series of automated
workstations with infinite buffer capacities has been GJIGI1 queuing approximations used
in conjunction with approximate models for workstation output departure processes
(Whiff (1983), Hopp and Spearman (1995)). A GIIG/1 queue has a general distribution
for independent times between arrivals to a workstation, generally distributed service
times, and serves a single customer (job) at a time. This literature review is organized
into three main sections. The first section is a review of GJIG/1 queuing approximations.
The second section is a review of approximations of the departure process from an
automated workstation. For the most part the focus in these first two sections is on twomoment approximations. The third section reviews research directed towards analyzing a
series of automated workstations with finite buffers.
2.1 GIIG/1 Approximations
A review of some of the methods present in the literature to analyze a GJJG/1 queue is
given here. Because of the general nature and simplicity of the approximations that will
be reviewed they are applicable to any single server queuing system, and are very easy to
use. This simplicity and generality also leads to the expectation that they will not be
good approximations for certain types of queuing systems, like the one being tested in
this research.
Lindley (1952), in one of the earliest works carried out in this area, derived a recursive
integral equation for the distribution of the waiting times of jobs in a GIIG/1 system. As
pointed out by Lindley (1952) and subsequent researchers, the integral equations yield
analytically tractable solutions for very few cases. Since then, researchers have focused
on developing approximate methods for finding the average number of jobs in a GJJG/l
queue.
There have been efforts to arrive at approximate methods by describing the number of
jobs in the system as a diffusion process. A diffusion approximation refers to the concept
of using the diffusion process (a continuous time, continuous state Markov process) to
model the discrete queuing process. Thereupon, the probability distribution of the number
of jobs in the system is usually arrived at by solving a system of differential equations.
Heyman (1975) derived a diffusion approximation for the distribution of the waiting
times by first deriving a diffusion approximation for the MIMI1 queue and using a similar
heuristic for a GJJG/1 queue. Kobayashi (1974) derived a diffusion equation for the
waiting time distribution, under the assumption that the difference in the number of jobs
in the system has a normal distribution. Reiser and Kobayashi (1974) give a method to
extend a diffusion approximation for the GIIG/1 queue to simple queuing networks.
Through empirical investigation, these researchers have also shown that the accuracy of
the diffusion approximation improves as the server utilization goes to unity. However,
Shanthikumar and Buzacott (1980), as part of their research on the comparison of the
various GIIG/l approximations, list some more diffusion approximations for the analysis
of the GJJG/1 queue. They carried out numerical comparisons between these GJJG/1
approximations and conclude that "heuristic approximations" perform better than
diffusion approximations.
In this context a heuristic approximation is one where the researchers have used existing
results for some special cases of the GTIG/1 system (e.g., MIGI1, MIM/1), combined with
their own intuition, conjecture and empirical studies to arrive at bounds for the GJIG/1
case. A substantial amount of research has been directed at obtaining GJJG/1
approximations. A majority of these are two-moment approximations that express the
average number of jobs in the system as a function of mean and variance of the interarrival and service time distributions.
Kingman (1976) derived an upper-bound for the expected wait time for a job in the
GJIGI1 queue. It has been shown that this upper bound can be used to obtain an
approximation for the expected wait time by multiplying the bound by a factor, which
LØJ
makes the resulting expression exact for the MIG/1 queue (Marchal 1976). The expected
waiting time in a GTIG/1 queue, given by Marchal (1976) is,
w
1+A2o
2(1u)
As shown by Marchal (1978) and also Medhi (1991), the upper bound for the average
waiting time derived by Kingman (1976) can also be modified by adjusting it by a factor
to arrive at,
w"
(u)(Ca2+Ce2')('1
1u)
2
)Li
which is the same as the approximation used in Hopp and Spearman (1995).
Daley (1977) derived an upper bound, which is also cited in Wolff (1988). Whitt (1984),
derived a factor, which when multiplied with the upper bound derived by Daley (1977),
resulted in an approximation for the expected wait time that is exact for the M/G/1 case.
This approximation is given below.
(1 + Ce2)
*
4o + o
(1 u)o]
2(1u)
[(21u)l]+Ce2
Kramer and Lagenbach-Belz (1976) derive what is called the "refinement
function" g() for different ranges of Ca2. The approximation for the average waiting time
is of the following form,
w
"
where,
=1_122i-,
1u)
)u)
2
(1_Ca2)21f
3u
exp[-2(1u)
Ca2+Ce2J
C2
<1
exp[(1_u)(Ca2_1)lfC2l
Ca2 +4Ce2
j
Sakasegawa (1977) derived a heuristic 2-parameter approximation for the average queue
length in a GJJGIs queue, given below:
Ca2 +Ce2
Lq
1u
2
For s
1 the above expression is same as the GJJG/1 approximation given by Marchal
(1978).
In the Queueing Network Analyzer (QNA) described by Whitt (1983), a combination of
GJJG/1 approximations given by Kramer and Lagenbach-Belz (1976) and Sakasegawa
(1977) is used. The QNA uses the former for Ca2 <1 and the latter approximation
for Ca2
1, resulting in,
w"
1u)
2
)u)
where,
g=
u) (1 Ca2
Iexpr_ 2(1
L
L1forCa2
3u
1
2
Ca2+Ce2
]
for Ca2 <1
2.2 Departure Process Approximations
Exact formulae for calculating the Cd2 value for a workstation (where Cd2 is the
squared coefficient of variation of inter-departure times from a workstation) are available
in only some special cases. For instance, in the case of the M/M/1 queue, the time
between departures is exponentially distributed. For the cases where the arrival time and
service time distributions follow a general distribution, the coefficient of variation of
inter-departures, Cd2 can only be estimated.
For a system consisting of a series of workstations the mean inter-arrival time and mean
inter-departure time of all workstations is the same if the utilization of all workstations is
strictly less than one (except for the first workstation which is assumed to have an infinite
supply of jobs). Also, the arrival process to a workstation is the departure process from
the prior workstation (with the exception of the first workstation). Therefore, the Ca2
value for a workstation other than workstation 1, is the Cd2 of the prior (upstream)
workstation. There have been several different approximations developed for Cd2, for a
workstation that does not have an infinite supply of work. These approximations are two-
moment approximations that utilize the squared coefficient of variation, and average
inter-departure times from prior workstations. Hopp and Spearman (1995) have proposed
a simple method for calculating Cd2 as a weighted ratio of
Ca2
and Ce2. The expression
for calculating Cd2 being,
Cd2 = u2Ce2 +(lu2)Ca2.
Buzacott and Shanthikumar (1993) have derived approximations for Cd2 using the
decreasing mean residual life (DMRL) property of the inter-arrival distribution. The
approximations are as given below:
Cd2 =(1u2)
ICa2 +u2Ce2
Cd2 =1u2 +u2Ce2 +(Ca2
1+u2Ce2
}+u2Ce2 and
l){(lu)(2u)+uCe(lu)}
2u + uCe2
These researchers point out that these approximations for Cd2 would work well only
ifCa2
1. Similarly, according to Whitt (1993), there may be serious errors in the
estimated values for the average number in system if Ca2 takes up values as high as 15 or
more.
Justification for the use of moment approximations in general is provided in Whitt
(1982), where an examination of the approximation of the superposition of point
processes by renewal processes is conducted. It is then suggested that distributions
matching moments of the superposed processes can be used to represent the renewal
distribution. These methods can, however, be used to fit a distribution only when the
moments to be matched satisfy a set of conditions derived in the research.
2.3 Serial Automated Systems With Finite Buffers
In contrast to a series of automated workstations with infinite buffer capacity, there has
been much more research directed towards analyzing a series of workstations with finite
buffers. In these systems the presence of finite buffers reduces throughput by causing
blocking of workstations.
A review of some of the studies that have focused on the analysis of serial production
lines involving automated workstations is given below. Altiok (1982) presented a method
to analyze a serial production line with blocking in which the workstations had Poisson
distributed arrival and departure processes and exponential processing times. Buzacott
(1966) analyzed an "automatic transfer line" with the aim of finding out the relationship
10
between capacity of buffers and the efficiency of the production line. Gershwin (1987)
analyzed the automated production line system with finite buffers and presented an
iterative method to evaluate approximate throughput and queue lengths. The method used
in this study was to analyze a serial line as a sequence of 2-workstation lines. This
process was iteratively applied to the whole line. Gershwin (1993) also presented a
method to calculate the variance of the output of a tandem production system.
Most of prior methods are numerical and thus require specially coded software to
implement. In contrast the objective of this research is to build an analytical model for
analyzing a production line consisting of a series of automated workstations with infinite
buffers.
11
3. ANALYTICAL MODEL
The approach taken in this research to develop an analytical method for analyzing an
arbitrary number of automated workstations in series uses a two-workstation Markov
chain model as a building block. The Markov Chain Model, given in Appendix A,
provides an analytical expression for the average number of jobs in Workstation 2 (WS
2). This model is a discrete time approximation of the continuous time system of two
workstations in series. Due to the discrete nature of the model, the workstation
parameters required are the failure probability, f and repair probability, r in place of the
mean time between failures (MTBF) and mean time to repair (MTTR). As found in Kim
(2003), the failure probabilityf, is defined as the probability that a workstation will move
into a down state at the end of the time cycle, if it had been up and processing ajob at the
start of the time cycle. Similarly the repair probability, r is the probability that a
workstation would be repaired at the end of the time cycle if it was in the down state at
the start of the time cycle. Assume for now that we have a method to calculate the failure
and repair probabilities from a workstation's MTBF and MTTR. The approach used for
analytically calculating the average number of jobs in downstream workstations is called
two-workstation decomposition and is outlined below.
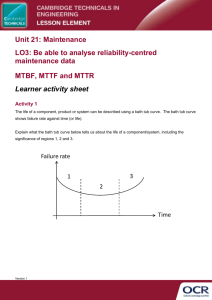
Figure 1. The two-workstation decomposition approach.
12
Two-workstation Decomposition Approach
1.
First apply the Markov chain model to the first two workstations of a production
system. Use a set of "linking equations" to calculate parameters of a single
"aggregate" workstation (failure and repair probabilities) such that the first two
moments of the departure process (inter-departure time process) from this
aggregate workstation equals the first two moments of the departure process from
the second workstation. In other words, using the linking equations, WS 1 and
WS 2 can be now replaced by a single "aggregate
workstation", that mimics the
output process from WS 2 (Figure 1).
2. The parameters for the aggregate-workstation and the parameters for WS 3 can
now be used in the Markov chain model to calculate the average number of jobs
inWS3.
3. This process is then repeated for subsequent workstations assuming the aggregate
workstation is now the first workstation in the system.
The rest of this chapter is organized in the following manner. A method to convert the
MTBF and MTTR values of a WS, into the failure and repair probability f and r is
described in section 3.1. This then sets the stage for the application of the Markov chain
model (Appendix A) for the first two workstations. Section 3.2 describes the derivation
of the probability distribution for the inter-departure time from WS 2. One of the terms
involved in this probability distribution isP, the probability that a job leaves WS 2
empty, which is the "information" calculated from the Markov chain model. The
calculation of this term is described in section 3.3.
13
3.1 Finding Markov Chain Failure and Repair Probabilities
In the two-workstation decomposition method described, a basic component of the
method is to combine two adjacent workstations into one aggregate workstation. The end
result of this is that it facilitates the use of the Markov chain model (Appendix A) on two
new workstations, namely, the aggregate workstation and the workstation downstream of
the aggregate workstation. However, before applying the Markov chain model and the
two-workstation decomposition method, all of the continuous time workstation
parameters (MTBF, MTTR) must be translated into Markov chain model parameters
(failure and repair probabilities). This is described in this section, where the objective is
to find expressions for Markov chain parameters for a workstation a function of the
workstations MTBF and MTTR, such that the mean and variance of the time a job spends
in a workstation is the same in continuous and discrete time.
The approach used is to derive expressions for the mean and variance of time that a job
spends in a workstation (processing time) in a discrete model with given failure and
repair probabilities. These expressions can then be equated to known expressions for the
mean and variance of time that a job spends in the workstation, which are functions of the
MTBF and MTTR. The failure and repair probabilities can then be expressed as functions
of workstation MTBF and MTTR.
Let, P = the total time spent by a job in a workstation. It may be observed that P is the
sum of the unit processing time and random downtime of the workstation, if any.
The quantities E[PJ, E[P2] and Var[PJ for an automated workstation (in discrete time)
having parameters f and r are derived as shown below.
14
3.1.1 First Moment of the processing time
By conditioning on whether the workstation was up or down when the job enters the
workstation we have,
E[P] = E[P I =1] * P(I =1) + E[P 1
0] *
P(I = 0) , where,
I = 1 if a failure occurred when a job just moves into the workstation
=0 otherwise.
E[P] =
f*
+ 1)(1
r)' r + 1 * (1f)
where, k is the time to repair the workstation and hence k
k
(1)
1, 2. . co. We know that
0 when a failure has, indeed occurred.
Evaluating (1)
(2)
3.1.2 Second Moment of the processing time
Conditioning once again on the indicator variable I, which was defined previously,
E[P2] = E[P2
I 11* P(I = 1) + E{P2 I = 01* P(I = 0)
I
E[P2]=f*(k+1)2(1_r)lr+(1)2 *(1_f)
Evaluating the right hand side of the above equation,
r2 +f(2+r)
r2
Var[P]
E[P2]
(E[P])2
(3)
15
Using (2) and (3) above, the following variance of the time spent by a job in a
workstation having f and r as parameters, is calculated.
Var[P]
f(2
r
f)
(4)
The above expression can also be arrived at using the method given below:
Var[PJ = E1[Var(P I)] + Var1[E(P I)] (Ross, 1988),
I
I
(5)
where, I is as defined previously.
Since the random variable Y I = 1 is a geometric random variable with the parameter r,
Var(PII=1)=
1r
r
(6a)
2
If the workstation is up, the variance of the processing time is 0, because of deterministic
unit processing times for the workstations.
Var(PII=0)=O,
(6b)
Using (6a) and (6b),
E1[Var(P
Similarly,
J)]
f*
(1
r) + O*(1_f)
r
f(1
r2
r)
(7)
16
EJ[E(P I
I)]
(1+
+ (1f)
(8a)
* f + (1f) * (1)
EZ{E(P I 1)2] = (1
f+2fr+r2
(8b)
r2
Using (8a) and (8b),
f+2fr+r2
Var[E(PII)]=
_1i+L2
(9)
r)
r2
Using (7) and (9),
Var{P]
j(2
,which is the same as (4), given above.
3.1.3 Failure and repair probabilities for a WS
The mean and variance of the time spent by a job in a workstation (in continuous time)
can be expressed as a function of the workstation's MTBF and MTTR. For the system,
being considered here, it is assumed that MTBF and MTTR for the workstations are
independent and exponentially distributed.
E[P]
(MTBF + MTTR1
MTBF
)S
17
In the automated workstation being considered in this study, the processing times all the
workstations are assumed to be equal and deterministic, and hence without loss of
generality, S = 1.
Hence,
E[P]
MTBF + MTTR
MTBF
(10)
The variance of the time spent by a job at a workstation has been derived by Kim and
Alden (1997).
Variance=
(2MTTR2 "(
1
MTBF J1sJ
(11)
Similar to Equation (10), the value of S is equal to 1 in the above equation as well.
The mean and variance of time spent by a job in a workstation can now be calculated.
These two values can be matched with the expressions in f, r of the mean and variance of
time spent in a workstation (Equations (2) and (4)).
Solving the following equations,
MTBF+MTTR
MTBF
r
2MTTR2f(2rf)
MTBF
ç
gives
2MTTR
MTBF+MTTR+2*MTBF*MTTR
18
(12)
2MTBF
r=
MTBF + MTTR +2 * MTBF * MTTR
Thus, the parameters f and
r
of a workstation can be calculated from the MTBF and
MTTR of the workstations. This is done so that the parametersf and r can then be used in
the Markov chain model, described in Appendix A, to calculate the average number of
jobs in the system.
3.2 Distribution of inter-departure times from WS 2 in the two-workstation Markov
chain model
Consider two workstations in series operating in discrete time with failure probability
and repair probability r, for workstation i (i
departure times from WS
2
1,
2).
f,
The mean and variance of the inter-
can be calculated if the underlying probability distribution of
the inter-departure times is known. Since the Markov chain model is discrete, this
distribution will be a discrete probability distribution.
Let, k = time between departure of jobs from WS
2.
It can be seen that
k is
a positive-
valued discrete random variable.
Let,
E:
the event a job leaves WS
F:
the event ajob leaves WS 2 in a failed state; P(F) =
2
empty; P(E) =
Since events E and F only occur when a job is leaving a workstation, the status of the
workstations just before the occurrence of E is that WS 1 is down, and WS
2
is up, and
19
for F, WS 2 is up. Given that WS 2 is up, its probability of failure is independent of the
contents of its input buffer. Hence the following holds true.
P(EnF) P(E)*P(F)
The probability of the event E, P is calculated using the Markov Chain model as shown
in the next section.
To derive the probability distribution of the inter-departures, we condition on specific job
inter-departure times from WS 2.
k=l
The inter-departure time of jobs can be 1, only when the events Ec and Fc occurred at
the departure of the
th
job. In other words, WS 2 should not be down and non-empty
after the departure of the nth job.
Hence,
P(k
=1)=(1_Pe)(1f2)
k=2
Let I = 1, if WS 2 is empty but has not failed after the departure of the nth job,
= 2, if WS 2 has failed but is not empty after the departure of the nt job,
= 3, if WS 2 has failed and is also empty after the departure of the ntI job,
=4, if WS 2 has not failed and is not empty.
(13)
20
It can be seen that,
P(I =:1)=Pe(1_f2)
P(I=2)=(1P)f2
P(I
)pef2
P(I =4) = (1 i )( f2)
(14)
It can be verified thatP(I =r)=1. We also haveP(k=q,q2I =4)=0, because
if I = 4, then k = 1 is the only possibility.
Using the law of total probability,
P(k=2)=>P(k=2II =p)P(I =p)
(15)
For the case I = 1, for k to be equal to 2, WS 1, must have been repaired by the time
the flth job departs from WS 2. Hence, the 2 time units are just times spent by the (n + 1)th
job in getting processed in WS 1 and WS 2. Hence,
P(k = 21 I =
1)
=
Using a similar argument, it can be seen that,
P(k = 2 I I = 2) =
P(k = 21 'n 3) = rr2
21
Hence, from (14),
P(k
2) = J(1
(1 J)f2r2 +
f2)ij +
(15)
k=3
We use the same indicator variable I,, as defined above. The next step would be to
calculate the values of-
P(k = 3 I
I = m),m = 1,2,3.
For the case I = 1, for k to be equal to
3,
the (n +
1)th
job must have spent
2
time units
in WS 1 and its queue and 1 time unit in getting processed by WS 2. This means that,
after the departure of the n job from WS 2, one time unit was used up in the repair of
WS 1, and
2
time units were used up in the processing of the (n +
l)t1
job on each of the
two workstations. Hence,
P(k=3JI =1)=(1i)r.
For the case I = 2, for
units in WS
2
(16)
to be equal to
k
3,
the (n +
l)t1I
job must have spent two time
without getting processed. This means that at the end of the first time unit
after the departure of the
job, WS
2
must still have been in a failed state. At the end of
the second time unit after the departure of the nth job, WS
2
must have been repaired and
at the end of the third time unit the (n + l)th job must have departed from WS 2. Hence,
(17)
P(k=3II =2)=(1r2)r2.
For the case I =3, for
k
to be equal to
3,
the (n
l)th
job could have spent 2 time units
in WS 1 or in WS 2. We condition on the state of WS 1 after the departure of the ntl job.
22
Let,
J, =0, if WS 1
= 1,
is down when the nth job departs, and
if WS 1 is
up when the nth job departs.
By definition, we have
P(J =0) =1
P(J =1) =
If J, = 1,
then the (n +
1)t1
job must have spent 1 time unit in getting processed in WS 1,
one time unit in WS 2 without getting processed and 1 time unit getting processed in
WS 2. Hence we have the following,
P(k=3II =3,J =1)=(1r2)r2.
Consider the case when k
(18)
= 3, J, = 0
(andI = 3).
WS 1
must necessarily get repaired at
the end of the next time unit (the next time unit after the departure of the nh job) so that
k = 3 is
true. The probability of the occurrence
time unit after the departure
of the
of this
event is rj. At the end
of the
first
nh job, WS 2 may or may not have been repaired.
Let,
K = 1, if, after the departure of the nth job from WS 2, the (n + 1) th job takes 1 time unit
to arrive at WS 2.
= 2, if, after the departure of the nth job from WS 2, the (n + l)th job takes 2 time
units to arrive at WS 2.
= 3,
if, after the departure
of the
nthjob from WS 2, the (n + l)th job takes more than
2 time units to arrive at WS 2.
The distribution for the indicator variable
K
is as follows.
23
P(K =1) =0
P(K =2) =
P(K =3) =1
We therefore have, the following:
P(k=3II=3,J=0,K=2)=r2+(1r2)r2
P(k=3II =3,J =O,K =3)=O
(19)
We now uncondition on the indicator variable, K,, to get the following.
P(k=311,, =3,J,, =O)=r(r +r2(lr2))
(20)
We now uncondition on the indicator variable, J,, (Equations 18 and 19 given above) to
get the following.
P(k=311,, =3)=(1ij){rj(r2 +r7(1r2))}+r1{(1r2)r2}
(21)
Finally, we uncondition on the indicator variable, I,, (Equations 14, 16, 17 and 21 above)
to get the following.
P(k = 3) =
1f2)[(1ij)ij]+(1P,,)f2[(1r2)rj
+Jf2[(1r1){ij( +i(1r2))}+11{(1r2)r2}]
k = c, C
4
We use the same indicator variable I,,, as defined above.
24
For the case when I =1, WS 1 must have not been repaired for c 2 time units after the
departure of the nh job. In addition to this, WS 2 must also have got repaired at the end of
the c
1 time units, so that the (n + l)th job departs after c time units. Therefore, we have
the following equation.
P(k=c,c4JI =1)=(1-r1)2ij
(22)
Similarly, for the case when I,, =1, WS 2 must not have been repaired for c
units and must have got repaired after c
2 time
1 time units, after the departure of the nth job
from WS 2. Therefore we have,
P(k=c,c4JI =2)=(1_r2)c_2r2
(23)
For the case I =3, consider the indicator variable J as defined above. For the case
J, =1 (that is, WS 1 is up when the n1 job departs WS 2), it can be seen that WS 2 must
not have been repaired for c
at the end of c
2 time units and subsequently, it should have got repaired
1 time units. Therefore we have,
P(k=c,c4II =3,J =1)=(1_r2)c_2r2
(24)
For the case I =3 and J =0, consider the indicator variable L, defined as given
below.
= 1, if, after the departure of the nth job from WS 2, the (n + l)th job takes c 2 time
units or less to arrive at WS 2.
= 2, if, after the departure of the nt job from WS 2, the (n + l)th job takes exactly
c
1 time units to arrive at WS 2.
25
= 3, if, after the departure of the nth job from WS 2, the (n + l)th job takes more than
c
1 time units to arrive at WS 2.
The probability distribution for the indicator variable L is given below.
P(L =l)=(1r)r,
P(L
=2)=(1,y31
P(L =3)=(1-iiY2
It can be verified that
P(L = j) =1, holds true.
It can be seen that ifL =1, then WS 2 must have taken c
1 time units to get repaired.
Hence, we have,
P(k=c,c4II =3,J =O,L =1)=(1_r2)c_2r2.
Similarly, if L = 2, then WS 2 must have taken c
1 time units or less to get repaired.
Hence, we have,
P(k=c,c4II =3,J =O,L =2)=(lr2)'r2.
It can be seen that ifL =3, then k cannot equal c. Hence we have,
P(k=c,c4II =3,J =O,L =3)=O.
26
We now uncondition successively on the indicator variables used. We first uncondition
on Ln , to get the following.
cI
C-4
j=I
i=o
"n =O)=(1_ij)c_3, *(1_r2)lr2 +(1r2)2r2 *(1_rj)1r1
P(k=c,c4II
We uncondition on J, andI, successively and in that order, to get the following.
P(k = c, c 4)
=Pe(1f2)[(1 _rj)c_2ri] +(1 P)f2[(1 _r2)r2]
+((lr2)2r2)(1i)} r1{(lr2)2r2}]
The complete probability distribution for the inter-departure times is given below.
P(k=1)=(1I)(1f2)
P(k = 2) =](1f2)ij +(1P)f2r2 +1f2ijr
P(k =3) =I(lJ)[(lij)i]+(lI)f2[(lr2)i]
+]f2[(1ij){ij(r2 +r2(lr2))}+ij{(lr2)r2}]
P(k = c, c 4)
f2)[(1
r)2rJ + (1
Pe)f2[(1 r2)
ci
c-2
r2]
c-4
[(1_r1){((1_r1)r1)(1r2yr2 +((1r2)2r2)(1r1)r1} +
1
j=i
[1{(1r2)
c-2
r2}
]
The above distribution can be used to calculate the mean and the variance of the interdeparture times, if the value of P is known.
The first two moments of the inter-departure times from WS 2 have been calculated and
are as follows.
27
= Mean2
E{k] =1+
Ti
E[k2]=
r +f2(2+r)(2
+-+ f2r2(
1
1)f2(2+ij)
(r+rrr)2
L'ii
J
The details pertaining to these calculations are given in Appendix D.
3.3 Information from the Markov Chain model
Let X be the long term probability of the system of WS 1 and WS
2
being in a state which
can lead to departure ofajob, given that a job, indeed departed.
Let,I = 1, if there is exactly 1 job in WS 2 at the start of cycle,
= 2,
if there are 2 or more jobs in WS
In the Markov chain model (Appendix A),
2
r0
at the start of cycle.
and
of finding zero and one job respectively in the WS
WS
2
r1
2
refer to the long-term probabilities
system (that is the number ofjobs in
and its queue).
It can be seen that,
=1)
= 2) = 1
The notation used in Appendix A for describing the long term probabilities involved with
certain events is given below. ib, is the long term probability of finding WS 1 in state
a, WS 2
in state b, given q jobs in the WS 2 system. The variable
a takes
a value of 1 or 0
depending on whether or not WS 1 is up. Similarly b takes values 1 or 0 depending on
whether or not WS 2 is up.
1, then the long term probability of being in a state which can lead to a departure
If I
of ajob from WS 2, isz1 + ,r. Similarly, whenI = 2, this probability isa
+
,r0.
Using the law of total probability,
X=(1
+
+ (if1 + 7t1)if1
By the definition ofI,
,r1,rI
__=________________
X
(1 ifX1TH2 + r) + (r1 +
The distribution of inter-departures from WS 2 has now been completely defined, from
which the mean and variance of inter-departures can be calculated. As discussed
previously, the next step is to replace WS 1 and WS 2 by a single workstation whose
output process mimics the output process of WS 2. This is done by matching the mean
and variance of inter-departures from both cases.
Thus, if Mean2 and Variance2 denote the mean and variance of inter-departure times from
WS 2, the parameters of the aggregate-workstation, namely, f' and r' are obtained by
solving the equations,
Mean2 =1+
Variance2
which leads to,
f'(2r'f')
29
f
r=
2(1-2Mean2
+Mean)
Mean2 Mean2 +
2(Mean2
Mean
Variance2
1)
Mean2 + Variance2
(16)
30
4. EVALUATION OF METHODOLOGY
Discrete-event simulations of serial automated workstations were carried out to evaluate
the performance of the analytical model. Arena 5.0 (Rockwell Software) was the
simulation tool used to carry out these studies. The simulation results for the average
number of jobs in the workstations and their input queues were compared with that
predicted by the analytical model. The simulation of automated workstation systems was
carried out until 1 million jobs had been processed by all the workstations present in a
particular system. The output from these simulations was the average of the average
number of jobs in system for each of the workstations over 30 replications. In addition,
comparisons between the results given by the analytical model and those given by some
of the GJIG/1 approximations discussed in the literature section are also given.
The following factors were used to create a variety of serial workstation systems for
analysis.
1. Number of automated workstations in the system.
2. Coefficient of variation of the processing time of the workstation.
3. Utilization of the workstations.
Experiments were conducted at different "levels" of each of these factors as shown in the
table below.
31
Table 1. The different factors and the levels for the simulations
Factor
Number of Levels Description of levels
Number of WS, N
2
1. Number of workstations = 3
2. Number of workstations = 10
1. CV between 0 and 1
2. CV between 1 and 2
CV of processing
3. CV between 2 and 3
5
times, Ce
4. CV between
3 and 4
5. CV between
4 and
1.
Utilization, u,
2
5
Utilization between 0.80 and 0.90
2. Utilization between 0.90 and 0.95
4.1 Simulation of 3-workstation systems
The MTBF and MTTR values for these systems were generated randomly. The procedure
is outlined below:
1.
Let the CV of processing times (total time spent by a job in a WS) be between
CV10
and
CV/,jgh
Let the utilization of the workstations be between
and
Uhj.
2. Effective speed Se of a WS may be defined as the product of the actual speed S of
the workstation and the proportion of time the WS is up. Hence, we have,
Se=SI
MTBF
(\MTBF + MTTR
32
It was ensured that all workstations had an effective speed of more than 0.5. In
other words, the MTBF is always greater than the MTTR for any workstation.
3. Very large and very small MTBF and MTTR values (values greater than 10,000
and less than 0.1), if any, were discarded.
4. First, the effective speed of WS 1, Se1, was arrived at, by generating a random
number between 0.5 and
U high
5. Secondly, the CV of processing times on WS 1, Ce1, was arrived at, by generating
a random number between
and
CVh,gh
6. The MTBF and MTTR values for WS 1 can be calculated using the following set
of equations:
cv2
MTBF1=
2(Se1
1)
2
(17)
C2
MTTR1
2(Se1 1)Se1
The following is a description of the procedure used to derive the above set of
equations. By definition, the following equations for
Se1
and Ce12 hold true.
MTBF
MTBF + MTTR
Se
2
Ce1 =
2(MTTRI2/MTBF)
(1/Se)2
Solving for MTBF1 and MTTR1 in the above equations leads to equation set given
in (17).
7.
For subsequent workstations in the system, a similar procedure was adopted,
except for the fact that the speeds of these workstations were random numbers
generated between
and 1. This was done to ensure that the utilization values
U high
33
for the workstation was less than 1 and the speed of the workstation was more
than speed of WS 1.
The following table gives the list of all the experimental sets carried out on systems
having 3 automated workstations.
34
Table 2. Description of the different 3-workstation systems simulated
Label for
Number of
Experiment
workstations systems simulated
3_WS_CV1_L
3
20
3_WS_CV2_L
3
20
Number of
Description of the system
CVs between 0 and 1
u, s between 0.8 and 0.9
CVs between 1 and 2
U
s between 0.8 and 0.9
CVs between 2 and 3
3_WS_CV3_L
3
20
3_WS_CV4_L
3
20
u, s between 0.8 and 0.9
CVs between 3 and 4
CVs between 4 and 5
3
3_WS_CV5_L
u, s between 0.8 and 0.9
20
u, s between 0.8 and 0.9
CVs between 0 and 1
3_WS_CV 1_H
3
20
3_WS_CV2_H
3
20
3_WS_CV3_H
3
s between 0.9 and 0.95
CVs between 1 and 2
u, s between 0.9 and 0.95
CVs between 2 and 3
20
U
s between 0.9 and 0.95
CVs between 3 and 4
3_WS_CV4_H
3
20
U
s between 0.9 and 0.95
CVs between 4 and 5
3_WS_CVS_H
3
20
s between 0.9 and 0.95
In addition to the experimental sets described in the above table, two other 3workstation
systems were also simulated. In the first set of experiments, the second and the third
Ji
workstations were identical. In the second set of experiments, the second and the third
workstations were ensured to have very different Ce values. In other words, the third
workstation would have a Ce between 4 and 5, if the second workstation had a Ce
between 0 and 1, and vice-versa. Five such systems were randomly generated and then
the second and third workstations were inter-changed so that there were a total 10
different 3-workstation systems with the second and third workstations having dissimilar
Ce
values. The following table summarizes the two additional experimental sets of 3-
workstation systems.
Table 3. Additional 3-workstation systems simulated
Label for
Numberof
Number of
Experiment
workstations
systems simulated
3_WS_Dis
3
10
Descnption of the system
Ce1
between 0 and 5.
Ce3
between 0 and 1 if
Ce2
between 4 and 5, and viceversa.
u, s between 0.8 and 0.95
3WSSim
3
10
Ce1
between 0 and 5.
Ce2
between 0 and 5.
WS 2 and WS 3 identical.
4.2 Simulation of 10-workstation systems
A total of 6 experimental sets having 10-workstations were simulated. In the first set, the
Ce values
of the workstations were allowed take values between 0 and 5. In the five
subsequent sets of experiments, the Ce values of the workstations were allowed to take
values within smaller intervals as summarized in the table below.
Table 4. Description of the different 10-workstation systems simulated
Label for
Numberof
Number of
Experiment
workstations
systems simulated
10_WS_CVO5
10
10
Description of the system
Ce values between 0 and 5.
u.s between 0.8 and 0.95
Ce values between 0 and 1.
1 0_WS_CV 1
10
10
10_WS_CV2
10
10
1 0_WS_CV3
10
10
10_WSCV4
10
10
10_WSCV5
10
10
u, s between 0.8 and 0.95
Ce values between 1 and 2.
u.s between 0.8 and 0.95
Ce values between 2 and 3.
s between 0.8 and 0.95
Ce values between 3 and 4.
s between 0.8 and 0.95
Ce values between 4 and 5.
u,s between 0.8 and 0.95
Thus, there were 18 experimental sets in all
12 of which were systems having 3
workstations and the rest having 10 workstations.
A total of 5 GI!G/1 approximations were compared with the analytical model. In the
analytical model, the linking equations provided the mean and variance of inter-departure
times from workstation i. For the
GJJGI1
approximations, three different methods to
calculate Cd,2 found in the literature were used. Thus, this resulted in a total 15
37
combinations against which the results from the analytical model were compared. The
different combinations are listed in the table given below.
Table 5. List of all the different theoretical models
Label
Calculation for average number in system
Calculation of departure process
Markov chain model
Linking equations
2
Marchal (1976)
Hopp and Spearman (1995)
3
Marchal (1976)
Buzacott and Shantikumar (1993)
4
Marchal (1976)
Buzacott and Shantikumar (1993)
1
Marchal (1978),
5
Hopp and Spearman (1995)
Hopp and Spearman (1995)
Marchal (1978),
6
Hopp and Speannan (1995)
Buzacott and Shantikumar (1993)
Marchal (1978),
7
Hopp and Spearman (1995)
Buzacott and Shantikumar (1993)
8
Daley (1977)
Hopp and Spearman (1995)
9
Daley (1977)
Buzacott and Shantikumar (1993)
10
Daley (1977)
Buzacott and Shantikumar (1993)
11
Kraemer Langenbach-Belz (1976)
Hopp and Spearman (1995)
12
Kraemer
Langenbach-Belz (1976)
Buzacott and Shantikumar (1993)
13
Kraemer Langenbach-Belz (1976)
Buzacott and Shantikumar (1993)
14
Whitt (1983)
Hopp and Spearman (1995)
15
Whitt (1983)
Buzacott and Shantikumar (1993)
16
Whitt (1983)
Buzacott and Shantikumar (1993)
The measure of performance used for the comparison of each of the 16 models listed
above was the absolute percentage errors calculated as shown below.
38
Absolute Percentage Error = IQsim
'sim I
S
where,
Qsjm
'sim
x 100%,
= the average number ofjobs in system from simulation,
= the average number ofjobs in system predicted by a model.
The graphs for the average of the absolute percentage errors in each of the 18
experimental sets are given in the next chapter.
39
5. RESULTS
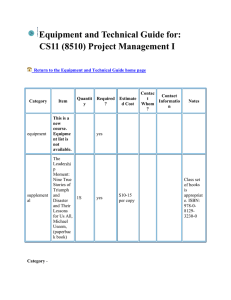
5.1 Results for 3-workstation systems
For each of the 3-workstation system categories mentioned in Table 2 there were 20
different systems simulated on Arena. As shown in Table 2, there were 20 different 3
workstation systems simulated. From each of those simulations, the average number of
jobs in WS 3 was obtained and the Absolute Percentage Error (APE) was calculated as
shown previously. The following graph shows the average of the 20 APE values obtained
for the average number of jobs in system for WS 3. In the graphs that follow, the x-axis
represents the different models
for instance, model 1 represents the analytical model
that was derived in this research.
3 WS CVI L
Average Errors for average number of Jobs in WS 3 and its queue
0.45
0.4
0.35
0
0.3
0.25
o
0.2
0.15
0.1
0.05
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Index for the model
Figure 2. Results for the 3_WS_CV1_L system.
16
17
16
19
40
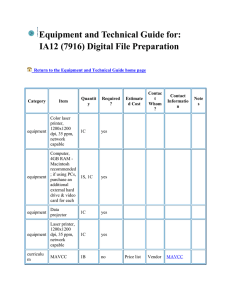
In the case of the 3-workstation systems mentioned in Table 3 and the 10-workstation
systems mentioned in Table 4, the number of systems simulated on Arena was 10.
3 WS CV2 L
Average Errors for average number of jobs in WS 3 and its queue
0.45
0.4
0.35
0
0.3
C
0.25
0.2
a
0.15
a
0.1
0.05
1
2
3
4
5
6
7
8
9
10
11
12
13
Index for model
Figure 3. Results for the 3_WS_CV2_L system
14
15
16
41
3 WS CV3 L
Average Errors for average number of jobs in WS 3 and Its queue
0.45
0.4
0.35
0
0.3
C
0.25
0.2
.0
4
a
0.15
a
0.1
0.05
0
2
4
3
5
7
6
8
9
10
11
12
13
14
15
16
Index of model
Figure 4. Results for the 3_WS_CV3_L system
3 WS CV4 L
Average Errors for average number of jobs in WS 3 and Its queue
045
0.4
0.35
0
0.3
0.25
0.2
.0
4
a
0.15
4
0.1
0.05
0
1
2
3
4
5
6
7
8
9
10
11
12
13
Index for model
Figure 5. Results for the 3_WS_CV4_L system
14
15
16
42
3 WS CV5 L
Average Errors for average number of jobs in WS 3 and its queue
0.45
04
0.35
0
0.3
025
a.
a
0.2
.0
a
0.15
0.1
0.05
1
2
4
3
5
6
8
7
9
10
11
12
13
14
15
16
Index for model
Figure 6. Results for the 3_WS_CV5_L system
3 WS CVI H
Average Errors for average number of jobs In WS 3 and Its queue
045
0.4
0.35
0
0.3
C
0.25
02
a 0.15
a
0.1
0.05
0
1
2
3
4
5
6
7
8
9
10
11
12
13
Index of model
Figure 7. Results for the 3_WS_CV1_H
14
15
1
43
3 WS CV2 H
Average Errors for average number of Jobs in WS 3 and its queue
0.45
0.4
035
0
w
0.3
C
S
S
0.25
a-
C
0.2
.0
a
e
0.15
0.1
005
0
I
2
3
4
5
6
7
8
9
10
11
13
12
14
15
16
Index for model
Figure 8. Results for the 3_WS_CV2_H
3 WS CV3 H
Average Errors for average number of Jobs in WS 3 and its queue
0.45
0.4
0.35
0
Ui
& 0.3
C
S
a
0.25
a.
0.2
0.15
0.1
0.05
0
1
2
3
4
5
6
7
8
9
10
11
12
13
index for model
Figure 9. Results for the 3_WS_CV3_H
14
15
1
44
3 WS CV4 H
Average Errors for average number of jobs In WS 3 and its queue
0.45
0.4
0.35
0
0.3
0.25
0.2
.0
0
a
0.15
0.1
0.05
0
2
3
4
5
6
7
8
9
10
11
12
13
14
15
1
Index for model
Figure 10. Results for the 3_WS_CV4_H
3 WS CV5 H
Average Errors for average number of jobs In WS 3 and Its queue
0.45
04
0.35
0
0.3
C
0.25
a
0.2
.0
0
0.15
a
0.1
0.05
0
1
2
3
4
5
6
7
8
9
10
11
12
Index for model
Figure 11. Results for the 3_WS_CV 5_H
13
14
15
1
3_WS_Dis
Average Errors for average number of jobs In WS 3 and its queue
o 45
0.4
0.35
2
0.3
0.25
0.2
0.15
0.1
0.05
0
2
3
4
5
6
7
8
9
10
12
11
13
14
15
16
13
14
15
16
Index for model
Figure 12. Results for the 3_WS_Dis
3_WS_Sim
Average Errors for average number of jobs in WS 3 and its queue
0.45
0.4
0.35
0
0.3
025
6
02
a
a
0.15
0.1
0.05
0
2
3
4
5
6
7
8
9
10
11
12
Index for model
Figure 13. Results for the 3_WS_Sim
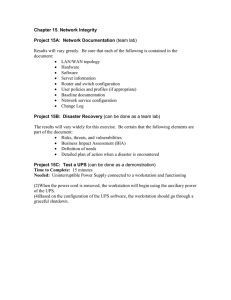
5.2 Results for 10-workstation systems
lowscv1
Average Errors for Average number of jobs In a WS and Its queue
0.350
0.300
4-1
5-2
3
0.250
w
a
*-5
4-6
8
C
0.200
4-- 7
e
a.
0.150
.0
10
11
5
12
13
0.100
14
* 15
16
0.050
0000
2
3
4
5
8
7
6
9
10
WorkStation
Figure 14. Results for the 1O_WSCV1
1O_WS_CV2
Average Errors for Average number of Jobs In a WS and its queue
0.350
0.300
.-1
4-2
w
S
3
0.250
4
*5
-
0.200
4-- 7
0
a.
S
.0
6
8
C
-.9
10
0.150
11
0
12
--
0.100
13
--.-.
14
15
16
0.050
0.000
1
2
3
4
5
6
7
8
WorkStation
Figure 15. Results for the 1O_WS_CV2
9
10
47
1 OWS_CV3
Average Errors for Average number of jobs in a WS and its queue
0.350
0 300
U-2
w
C
3
0250
4
-a-- 5
--6
C
8
9
0200
4--i
a
a-
a
a
0.150
10
.0
11
C
,'__\\S*.k
/
0 100
0 050
12
13
-*-- 14
5-15
____-
16
0.000
2
3
4
5
6
7
8
9
10
WorkStation
Figure 16. Results for the 1O_WS_CV3 system
1O_WS..CV4
Average Errors for Average numb.r of Jobs In a WS and Its queue
0.350
0300
.-1
U
w
C
* 5
C
8
0200
4-7
C
a-
C
a
a
2
3
_r. 4
0.250
0.150
10
11
C
12
.--..---.,......---,
13
0100
14
-*-- 15
16
0050
0 000
1
2
4
3
5
6
7
8
9
WorkStation
Figure
17.
Results for the 1 OWS_CV4 system
iC
1O_WS_CV5
Average Errors for Average number of jobs in a WS and Its queue
0.350
0.300
.-1
5-2
3
0.250
4
Mi
5-5
a
C
8
0.200
'--.7
a
a.
a
0
0.150
10
ii
.0
a
12
I!
13
0.100
14
15
16
0 050
A AflA
12345678950
WorkStation
Figure 18. Results for the 1 O_WS_CV5 system
1O_WS_CVO5
Average Errors for Average number of jobs in a WS and Its queue
0.700
0.600
.-1
5
2
3
p0.500
4
UI
5-5
a
--6
8
C
+7
0.400
a
aa
a
--9
0.300
10
.0
11
a
12
13
0.200
14
-
15
16
0100
0.000
2
3
4
5
6
7
8
WorkStation
Figure 19. Results for the 1O_WS_CVO5 system
9
10
49
5.3 Ranking workstations
For 10-workstation systems, the workstations were ranked on the basis of the average
number of jobs in the workstations and its queue, as given by the simulation. In other
words, the workstation with the highest value for the average number of jobs was given a
rank of 1. This ranking of workstations was carried out for workstations 3 through 10.
Such a ranking was also done for the predicted values given by the theoretical model and
each of the 15
GJJGI1
departure process combinations. The number of times, a
workstation was wrongly ranked by a model was counted. The results for this count are
given in Table 5. For example, it can be seen from the table that, in case of the
1 OWSCV 1 system, the theoretical model gave a wrong workstation rank in 18 cases
out of a total of 80 cases, whereas the K-L-Belz 1 combination gave a wrong workstation
rank in 45 cases.
Table 6. Number of cases of incorrect workstation ranks for 10-workstation systems
Model
Index
10 WS CV1
10 WS CV2
10 WS CV3
10 WS CV4
10 WS CV5
10- WS- CVO5
1
18
7
8
6
0
14
2
41
31
18
24
21
27
3
44
39
28
36
28
32
4
44
39
28
33
28
32
5
44
27
14
18
15
23
6
43
31
25
28
24
26
7
43
30
25
28
24
26
8
41
31
18
24
19
27
9
44
39
28
35
26
32
10
44
39
28
33
26
32
11
45
26
12
18
12
20
12
44
29
25
26
24
21
13
44
29
23
26
24
21
14
45
27
14
18
15
23
15
44
31
25
28
24
26
16
44
30
25
28
24
26
6. CONCLUSION
The analytical model developed in this research results in a model for analyzing a series
of automated workstations that clearly outperforms other existing analytical approaches
(Two-moment GIL/Gil approximations). In most cases tested, the various GJIG/l
approximations examined in this research resulted in higher average absolute percentage
differences (compared to simulation results) for the average number ofjobs in the system.
For the analytical model, the typical average difference was less than 5%. In addition, the
model seems to perform well for systems where the coefficient of variation of processing
times was greater than 4.0. Among the GTIGI1 approximations used, the ones given by
Kraemer and Lagenbach-Belz (1976) and Whitt (1973) seem to give better results than
the rest. The analytical model presented here, also gave fewer errors in the ranking of
queues than the GIIG/1 approximations. The implications of this study are two-fold. First,
it has been shown that there exists an accurate analytical approximation for calculating
the average number of jobs in the workstation and its queue for systems discussed in the
study. Secondly, the analytical model does give consistently better results than other
approximate methods studied.
51
Bibliography
Altiok, T., 1982, "Approximate analysis of exponential tandem queues with blocking",
European Journal of Operations Research, Volume 11, 390 398.
Buzacott, J. A. and Shanthikumar, J. G., 1993, "Stochastic models of manufacturing
systems", Prentice-Hall International Series in Industrial Engineering.
Buzacott, J. A., 1967, "Automatic transfer lines with buffer stocks", International Journal
of Production Research, Volume 5, Number 3, 183 200.
Feinberg, B.N. and Chiu, S. 5., 1987, "A Method to Calculate Steady State Distributions
of Large Markov Chains," Operations Research, Vol. 35, No. 2, pp. 282-290.
Gershwin B. S., 1992, "Variance of Output of a Tandem Production System", Queueing
Networks with Finite Capacity, Proceedings of the Second International Workshop held
in Research Triangle Park, North Carolina, May 28-29, 1992, 291
302.
Gershwin, B. S., 1987, "An efficient decomposition method for the approximate
evaluation of tandem queues with finite storage space and blocking", Operations
Research, Volume 35, Number 2, March April 1987, 291
305.
Heyman, D. P., "A diffusion model approximation for the GIIG/1 queue in heavy traffic",
Bell System Technical Journal, Volume 54, Number 9, 1637
1646.
Hopp W. J. and Spearman M. L., 1995, "Factory Physics: foundations of manufacturing
management", 2
edition, McGraw-Hill Higher Education.
Kim, D.S., 2003, "The "A/All" Queue: A Queuing Model for an Automated Workstation
Receiving Arrivals from an Automated Workstation", Submitted to TIE Transactions.
52
Kim, D.S. and Alden, J. M., 1997, "Estimating the distribution and variance of time to
produce a fixed lot size given deterministic processing times and random downtimes",
International Journal of Production Research, Volume 35, Number 12, 3405
3414.
Kim, D.S., and Smith, R. L., 1995, "An Exact AggregationlDisaggregation Algorithm for
Large Scale Markov Chains," Naval Research Logistics, Vol. 42, pp. 1115-1128.
Kingman, J. F. C., 1961, "The single server queue in heavy traffic", Proceedings of the
Cambridge Philosophical Society, Mathematical and Physical Sciences, Volume 57, 902
904.
Klincewicz, J. G. and Whitt W., 1984, "On approximations for Queues, II: Shape
constraints", AT&T Bell Laboratories Technical Journal, Volume 63, Number 1, January
1984, 139-162.
Kobayashi, H., 1972, "Applications of the diffusion approximations to queueing
networks: Part I
Equilibrium queue distributions", Journal of the Association for
Computing Machinery, Volume 21, 316-329.
Kramer, W., and Lagenbach-Belz, 1976, "Approximate Formulae for the Delay in the
Queueing system GJJGI1 ", Proceedings of the Eighth International Teletraffic Congress,
Melbourne, 10 17 November 1976, 235.1 235.8.
Lindley, D. V., 1951, "The Theory of Queues with a single server", Proceedings of the
Cambridge Philosophical Society, Mathematical and Physical Sciences, Volume 48, 277
289.
Marchal G. W., 1976, "An approximate formula for waiting time in single server
queues", AIIE Transactions, Volume 8, Number 4, 473
474.
Medhi J., 1991, "Stochastic Models in queueing theory",
2uid
edition, Academic Press.
53
Reiser, M. and Kobayashi, H., 1974, "Accuracy of the diffusion approximation for some
queueing systems", IBM Journal of Research and Development, Volume 18, 110 124.
Sakasegawa, H., 1977, "An approximate formula
Lq
a p'° 1(1 p) ", Annals of the
Institute of Statistical Mathematics, Volume 29, Part A, 67
75.
Shanthikumar, J. G. and Buzacott, J. A., 1980, "On the approximations to the single
server queue", International Journal of Production Research, Volume 18, Number 6, 761
773.
Whitt W., 1982, "Approximating a Point Process by a Renewal Process, I: Two basic
methods", Operations Research, Volume3O, 125-477.
Whitt, W., 1983, "The Queueing Network Analyzer", The Bell System Technical
Journal, Volume 62, Number 9, 2779 2815.
Whitt W., 1984, "On approximations for Queues, I: Extremal Distributions", AT&T Bell
Laboratories Technical Journal, Volume 63, Number 1, January 1984, 115
138.
Whitt W., 1984, "On approximations for Queues, III: Mixtures of Exponential
Distributions", AT&T Bell Laboratories Technical Journal, Volume 63, Number 1,
January 1984, 163
175.
Whitt, W., 1993, "Approximations to the GIJG/1 queue", Production and Operations
management, Volume 2, Number 2, 114 161.
Wolff R. W., 1988, "Stochastic modeling and the theory of queues", Prentice-Hall
International Series in Industrial and Systems Engineering.
54
APPENDICES
55
APPENDIX A
56
A.1 Markov Chain Model of Two Automated Workstations in Series (Kim (2003))
We develop a Markov chain model of two automated workstations in series assuming
there is an infinite supply of unprocessed jobs before the first workstation and infinite
storage space between the workstations. This Markov chain model is a discrete time
model where the fixed processing time t, serves as the discrete time unit (it is assumed
that both workstations produce at the same speed when up). By the discrete nature of the
model, the operating times between failures, and repair times will follow geometric
distributions. In most automated workstations, this type of discrete approximation is
sufficiently accurate since the fixed processing times are normally much smaller than the
time between failures and repair times.
The mechanics of the discrete time Markov chain are as follows:
State transitions occur at the end of each time step.
Any workstation that is down at the beginning of a time step may be repaired even if
the workstation is empty at the beginning of the time step.
A workstation that is up and not empty at the beginning of a time step will complete
its job even if it moves to a down state at the end of the time step.
Any jobs completed at the end of a time step are moved out of the workstations and
new jobs are moved into the workstations even if a workstation moves to a down
state. Note that ajob may be moved out of both workstations, and ajob moved into
both workstations at the end of a time step.
Workstations that are up at the beginning of a time step but idle because they are
starved, cannot change to a down state at the end of a time step.
Since the first workstation always has jobs to process, its output represents the input to
the second workstation (from an automated workstation). We assume that the average
processing capacity of the first workstation is strictly less than that of the second
workstation. This ensures that the queue size (feeding the second workstation) will not
57
steadily increase over time. The objective of the model is to analyze the behavior of the
second workstation and its input queue, which we will refer to as the "system".
We let the state of the Markov chain at time unit n, X, =
workstation i and x,
E {O,1}.
(x1 ,x2, N),
where
= status of
x, = 0 if the workstation is down a the beginning of a time
step, and x, = 1 if the workstation is up a the beginning of a time step.
N is the number
of jobs in workstation 2 plus the number in the buffer between workstation 1 and 2. p is
used to denote the transition probability matrix of this Markov chain.
If workstation i is up and operating (an unprocessed job is in the workstation) at the
beginning of the time step, it remains up during the time step and may transition to a
down state with probability
f,
at the end of the time step. The job being processed in this
cycle will be completed and moved out of the workstation. If workstation i is down and
under repair at the beginning of the time step, it remains down during the time step and is
repaired with probability r, at the end of the time step. If an unprocessed job was present
in this workstation at the beginning of the time step, the job remains unprocessed and
must remain in the workstation until the workstation is repaired before being processed.
Since the actual workstations are assumed to have exponentially distributed operating
times between failures, and repair times, the probabilities
function of the fixed processing time t, MTBF
,
f,
and r, are computed as a
and MTTR. MTBF, is the mean
operating time between failures for workstation i, and MTTR1 is the mean repair time for
workstation i. The probabilities J and r, are computed such that the mean time to
process a job, and the variance of the time to complete a job in the discrete model match
that for the actual workstation. Without loss of generality let
t = 1,
and let P = the total
time spent by ajob in workstation i. In Kim and Alden (1997), and Hopp and Spearman
(1995) it is shown that
E[P. I
I
MTBF + MTTR
and Var[F]
MTBF
2* MTTR2
MTBF
The formulas for J and ,are derived in Section 3.1.3 of this document. For the discrete
model,
E[1J=1+1-
and Var[]=
r
2,fromwhich J and i
arefoundas:
r
2MTTR1
(1)
MTBF + MTTR +2 * MTBF * MTTR
r.=
2MTBF
MTBF, + MTTR +2 * MTBF * MTTR
(2)
A state transition diagram of the Markov chain model is shown in Figure Al.
Number In System
o
1
2
3
(1,1)
(1,0)
Ii)
(0,1)
(0,0)
Figure Al. State transition diagram for the Markov chain model
I1,
The transition probabilities between any two states in Figure Al are functions of the
workstation status at time n and n+1. For example the transition probability from state
(1,1,2) to (1,0,2) equals (1
f1 )f2. When there are no customers in the system (i.e.,
workstation 2 is starved), the transition probabilities reflect the assumption that
workstation 2 cannot fail if it is starved.
A.2 Derivations of the and Average Number in System and Distribution of the
Number in System
To derive analytical expressions for the average number in system and the distribution of
the number of jobs in the system, we take advantage of the transition structure of the
Markov chain, and Markov chain aggregation/disaggregation results (Kim and Smith
(1995), Feinberg and Chiu (1987)). Figure 1 was constructed in such a way that the
number in system defines a natural partitioning of the system states.
Following the
terminology defined in Kim and Smith (1995), a set of four states in the Markov chain
that represent the same number in system will form what is termed a macrostate. The
transitions from macrostate to macrostate also constitutes a Markov chain (Kim and
Smith (1995)). The solution to this macrostate Markov chain represents the solution to
the queuing model since the macrostates represent the number in system, and the
macrostate Markov chain steady state probabilities will equal the sum of the steady state
probabilities of all states contained in the macrostate (Kim and Smith (1995)). A diagram
of the macrostate Markov chain is shown in Figure A2.
...
Figure A2. Macrostate Markov chain model
A.3 Microstate Markov Chain Transition Probabilities
To compute the transition probabilities of the macrostate Markov chain (denoted by P),
the states within the macrostate must be examined in isolation (all transitions after a
macrostate is left are ignored). The states within a macrostate are referred to as
microstates, and the process realized by viewing the microstates in isolation constitutes a
Markov chain (Kim and Smith (1995)).
These Markov chains are referred to as
microstate Markov chains. If the steady state probabilities of the microstate Markov
chain are known, then they can be used to calculate the macrostate Markov chain
transition probabilities (Kim and Smith (1995)). To find the transition probabilities of the
microstate Markov chains (denoted by
N
for the microstate chain associated with N
customers in system) we take advantage of the transition structure.
Consider the microstate chain that corresponds to zero customers/jobs in the system. All
transitions leaving the set of states contained in this chain must eventually return to these
states (due to ergodicity), and re-enter the set of states from only a single state. Thus the
transition probabilities for those transitions leaving the microstate Markov chain states
are known. This is shown in Figure A3.
61
Number In System
0
1
r(1f)___
(1,1)
Transitions
leaving the
microstate chain
-b-
(1,0)
4-,
r
)(1
f2)
------1
(0,1)
-
I.
(1ij)A
(0,0)
Figure A3. Finding the microstate Markov chain transition probabilities
The transition probability matrix for the microstate Markov chain for zero customers/jobs
in the system is,
rjf
(1rj)(1f2)
(1r)f2
('-f) 'if
(1ii)(1f2)
(1r)f2
0
(1ii)
0
ij(1r2)
(1rj)r2
(1j)(1rf2)
r1(1f2)
p
rjr2
We next address the microstate Markov chain transition probabilities when there are two
or more customers in the system. In Figure 1 it can be seen that all transitions that
increase the number in system occur when workstation 1 is up and workstation 2 is down
(with the exception of 0 jobs in the system). Similarly all transitions that decrease the
number in system occur when workstation
I
is down and workstation 2 is up.
Furthermore the Markov chain structure (transition into, within, leaving) of the states
within a macrostate is the same when the number in system is two or greater. Therefore
p' p for I, J
p
2, and using the same reasoning as ised to find p° we get
1
(lf1)(1f2)
i(1f2)
(1-f1)f2
(1f1)r2
rr2
f1(1f2)
fJ2
(1rj)(1f2)
(1)f2
(1fl(1r2)
Jr2
J(1r2)
ii(lr2)
(li)r2
1
I for I2
(1 , )(lrL )J
To find p' requires knowledge of the steady state probabilities of p° since transitions
leaving the microstate chain (for one in the system) to the "left" in Figure 1 may return to
the microstate chain via two different states (as shown in Figures 1 and 3).
' = [rj
r
Let
r] represent the steady state probabilities of the microstate Markov
chain for I in the system, where
is the steady state probability for the microstate
representing workstation 1 in state i, and workstation 2 in statej. Let a
+
Then,
(lfl(lf2)
p
(1J)f2
f1(1f2)
fj
r(1f2)
(1r1)(lf2)
(lr1)f2
r1f2
a(1f1)+(1a)(1J)r2 (1a)(1f1)(1r2) af1 +(la)fr2 (1a)f(1r2)
r1(1r2)
(1i)r2
(1i)(1rf2)
A.4 Microstate Markov Chain Solutions
Analytical solutions for the microstate Markov chains can be derived as functions of the
workstation failure and repair probabilities. These are presented next.
Microstate Markov chain for N = 0.
ri(r2 +i(-1+f2 +r2))
71.0ii
ir2 -,j r2
f2i2
71.01,0
ijr2 -,j r2
=1 (-1+i)(r2
+r2))
'V2
71.000
f2(-1+)
1V.2
r2
Microstate Markov chain for N = 1.
_[ri+a(-1+f1+r)(-1+r2)+r2f1r2iir2][r2+r(-1+f2+r2)1
1,1
C
7r1,0_
(r1(-1+r2)+(-1+f1)r2)(f2
+f1(1af2 r2 +ar2))
C
[(f1(-1+f2)+f2(-1+r3)(r2
+(-1+f2 +r2))]
C
7r0,0_
[(f1(-1+f2)+f2(-1+r3)(f2
+f1(-1+a+f2 +r2 ar2))]
C
where,
i(r2+i(-1+f2+r2))
ij(r2
+r2))f2r
+i(-1+f2
and
2
// +r)
0
0
64
C f22(1 + ij)2
+ r2)(1 + a +
f2(-1--li)(2li ar1 +2r2 2ijr2 +arjr2)
f12(-1 +
+
ar2)
+(ij r2 +rjr2)(a+ Wi +r2 ar2 r1r2 +aijr2)
+f1[-2f22(l+j)+2(l+a)(l+r2)(ij r2 +rjr2)
ar,
2aij + 4r2
+ f2(-2 + a +
4r1r2 + 2aijr2)]
Microstate Markov chain for N 2.
2l
>2
i,i =
(,j(_1+T2)+(_1+f1)r2)*(_r2 +ij(-1+f2 +r2))
(f2
r >2 1,0 =
(,j(_l+r2)+(_1+fi)r2)*(_f2 +j(-1+f2 +r2))
(f2 +,
,r->2 0,1 =
>2
0,0
))2
+i f2ij +r2 ir2 f1(-1+f2
f2i +r2 i f1(-1+f2 +r2))2
(fl(_l+f2)+(_1+li)f2)*(_r2 +i(-1+f2 +r2))
(f2 +l f2rj +r2 ljr2 f1(-1+f2 +r2))2
i
(J(_l+f2)+(_1+li)f2)*(_f2 +f1(-1+f2 +r2))
f1(-1+f2 +r2))2
(f2 +i fij +r2
A.4 Macrostate Markov Chain
The macrostate Markov chain depicted in Figure 2 has the following transition
probability matrix structure.
p00
p01
0
0
0
0
0
Pio
0
p11
p12
0
0
0
0
q
r
s
0
0
0
0
0
q
r s
0
0
0
q
[o
rs
0
0
0
q
0
r s
65
The transition probabilities will be computed from the results of the microstate Markov
chain analysis. Let r = [r0 ,
,
,r2,...] represent the steady state probabilities of P
Because of the simple structure of the macrostate Markov chain, it is straightforward to
show that,
(q s)p10
p10 + p01
'0=
(q
s) +
(q
(3)
p01 p12
p10 + p01
s)p01
p10 + p01
(qs)+
(1
(q
s / q)
s) +
(1s/q)
(4)
0112
p10 +p01
Poi Pu
p10 + p01
(5)
p01p12
p10 + p01
p01 p12
+
=
(q s) +
for I
(6)
3.
P01P12
plo +pol
An expression for the average number in system can then be obtained
+2K + 3KJ + 4K[-iJ + 5K[J
Average Number in System
2
+
p01 p12
(1s / q)
p10 + p01
K
where
(q
Simplifying we get,
s)
p10 + p01
+2+
Average Number in System =
P12
2s
qs
+
sq
(q_)2)
(7)
Expressions for the transition probabilities in P are found using the results from the
microstate Markov chains and are as follows.
i(r2 +i(-1+f2 +r2))
pOl
r1r2ijr2
-f2
+
Fir2
r2
[(f(1 +f2)+f2(-1+r))(r2 +r(-1+f2 +r2))]
D
P12
s=
(r1(-1+r2)+(-1+f1)r2)(f2 +J(1af2 r +ar2))
D
(i(_1+r2)+(_1+J)r2)*(_f2 +f (-1+f2 +r2))
(f2 +ij f2i +r2 ir2 f1(-1+f2 +r2))2
(fi(_1+f2)+(_1+,i)f2)*(_r2 +ri(-1+f2
(f2 +ij f2r1 +r2 -ir2 f1(-1+f2 +r2))
q
where,
D =
f2(l--) f2(---l+f2 +r2)(-1+b+f2 +r2 br2)
+f2(-1+r)(2ij br1 +2r2 2rjr2 +br1r2)
+(r r2 +rr2)(b+r bi +r2 br2 ijr2 +br1r2)
+J[-2f22(l+i)+2(l+b)(-1+r2)(r r2 +r1r2)
+f2(-2+b+4r1
2bij +4r, br2 4ijr2 +2br1r2)]
67
b=
i(r2 +(-1+f2 +r2))f2i2
APPENDIX B
Table Bi Input Data for the 3WSCV1L system
WS1
WS2
MTBF
2.339
2.192
17.238
3.685
MTTR
1.122
0.317
2.201
1.798
1.049
0.171
2.576
4.221
0.912
3.939
0.732
3.336
2.461
4.534
9.596
0.11
5.809
0.549
0.972
2.936
0.484
0.088
1.281
1.42
0.624
1.306
0.397
0.78
0.688
1.705
2.701
0.024
1.03
0.212
0.541
0.431
WS3
MTBF MTTR
MTBF MTTR
6.44 2.017
3.809
1.08
930.331
3.47 264.035 2.762
1784.16 26.381 1319.243
3.528
1.06
7.552
1.761
0.33
2.527
0.634
7.108
2.234
1
4.915
1.224
0.362
7.128 2.054
10.59 2.208
3.387
0.273
15.309
1.755
2.266
1.008
4.44 2.019
5.256
0.734
35.028 2.975
4.72
3.392
1.004
1.436
19.524
0.599 1307.683 25.621
4.914 0.648
1.85
0.117
27.026 2.727
13.278
3.046
101.211
22.619
1.552
5.636
8253.806 61.188
42.433
2.967
254.153
8.536
169.651
9.342
6.202
1.485
13.544
2.673
2.499
1.698
0.524
0.952
22.279 0.559
174.958
2.551
70
Table B2 Input Data for the 3_WS_CV2_L system
WS2
WS1
MTBF
7.987
10.397
9.719
25.992
24.726
13.136
5.601
6.476
52.651
6.724
4.555
58.15
11.785
9.709
10.214
4.359
21.53
14.755
8.792
8.353
MTTR
5.626
6.301
7.438
7.112
9.023
8.208
5.129
6.4
6.682
6.438
2.744
8.612
5.249
3.456
3.227
2.967
8.441
8.185
6.144
2.706
WS3
MTBF MTTR
MTBF MTTR
5.107 2.509
13.346
6.36
21.677
6.454
2.731
9.15
6.453
3.524
6.224 2.957
224.452 22.64 2377.372 60.256
70.513 12.184
51.885 10.581
21.613
9.116
28.802 10.017
5.934 4.029
4.07
2.88
2.199
5.992
3.842
3.59
7295.83 70.923 6530.329 59.355
11.088
7.359
5.394
8.18
10.093
3.776
7.89
3.157
1337.268 40.255
711.966 19.813
16.312
4.747
17.503
4.748
25.982 4.226
35.329 6.562
275.299 21.705
551.4 31.022
10.186
23.872 9.572
3.959
97.059 13.227
88.922 13.894
24.457 7.695
14.401
5.523
2.914
6.584
3.284
7.995
51.244
7.788
23.944 4.257
71
Table B3 Input Data for the 3_WS_CV3_L system
WS1
WS2
MTBF MTTR
31.817 15.313
85.017 25.182
12.904
8.853
22.818 13.303
45.801 14.673
15.958 11.917
16.107
9.839
20.009
9.557
49.427 16.766
56.536
20.03
75.634 24.356
36.346 12.805
16.017 15.867
95.468 24.47
96.103 16.939
53.234 17.318
24.788
12.77
103.486 22.224
30.602 12.041
50.974 20.741
MTBF MTTR
46.202 13.029
957.23 55.539
31.523 13.104
39.021 14.819
139.997
19.29
41.638 19.077
WS3
MTBF
MTTR
24.824
45.865
11.596
26.507
33.937
9.526
15.762
27.751 12.465
24.202
72.159 23.641 126.851
33.765
344.139 34.089 212.144
246.019 24.831 379.822
40.955
238.855 30.843 184.498
31.866
46.424
132.35 22.887 524.543
25.968 15.474
11.129
8.698
1793.832 70.365 232.578
27.716
5861.3 135.346
1599.747 81.468
294.437 29.483 338.892 31.933
59.122 21.282
45.442 15.387
47.582
1358.611 68.012 557.165
29.39
85.524 17.962 152.453
20.532
130.668 22.549 134.231
124.7
831.664
31.427
97.72
233.13
19.187
46.806
72
Table B4 Input Data for the 3_WS_CV4_L system
WS1
WS2
WS3
MTBF MTTR
MTBF
MTTR
MTBF
MTTR
57.845 23.733
432.714 55.809
139.163
30.558
148.453
39.87
56.147
511.733
70.27
437.02
33.732 19.485
28.316
84.496 35.104
68.413
105.304 31.334
656.929 71.548
265.13
42.017
102.531 34.804
307.13
45.153
433.25
62.405
37.324 26.546
101.628 38.075
94.849
36.63
153.614 36.537
565.438
56.768 3092.181 162.955
33.899 24.096
32.725
68.328
27.121
63.815
32.394 20.078
77.302 28.938
85.873
36.759
148.186 44.156 1471.101
87.351 3796.458 145.844
33.306 21.817
78.966
34.564
78.348 30.712
32.989 21.893
71.585
31.614
63.902
29.27
63.094 28.624
42.695
144.15
40.003 247.453
29.664 20.284
23.795
70.321
28.411
53.75
109.742 31.768 2387.386 143.708 421.039
55.899
43.067 22.175
71.927
24.686 130.904 30.153
64.323 32.304
41.921
139.393
41.435
145.388
34.747 25.271
24.08
77.717
36.434
53.575
183.594
40.07 5086.872 168.888 2267.432 119.343
40.954 25.019
38.347
96.181
34.872
91.913
73
Table B5 Input Data for the 3WSCV5L system
WS1
MTBF
222.809
105.238
141.624
65.924
37.749
260.014
299.854
47.207
177.082
68.217
51.672
115.875
48.394
41.919
193.519
47.785
327.195
102.226
84.181
62.719
MTTR
WS2
MTBF
3441.336
207.254
1475.599
247.771
66.136
1553.229
1405.169
97.646
1070.197
111.609
MTTR
WS3
MTBF
634.494
67.389
212.339
51.965
195.1
63.3
48.125
149.29 1899.934
36.396
255.874
70.823
36.999
50.241
64.081
70.402
791.781
126.114
73.023
124.473 8991.207
35.25
130.867
53.286
53.169
129.112 2348.507
48.456
95.291
51.91
40.947
45.689
94.399
88.461
48.004
93.477
243
563.441
43.122
50.41
66.821
81.884
40.659
64.624
82.245
50.338
52.767 979.244 118.758 1521.225
42.408
74.851
38.997
65.159
66.115 2261.993 170.311 6986.513
47.143 244.606 61.166 384.463
40.635
173.554
47.648 233.692
39.487
144.339
112.131
47.806
MTTR
95.02
59.815
148.98
65.587
43.795
111.271
311.8
58.512
146.32
43.182
41.95
64.116
45.917
47.21
125.578
39.486
292.51
72.28
67.384
59.543
74
Table B6 Input Data for the 3_WS_CV 1_H system
WS1
MTBF
1.147
9.705
1.925
1.304
5.293
0.35
10.721
5.493
2.693
0.776
2.998
1.884
0.475
3.637
4.775
1.229
0.512
2.212
2.761
5.519
WS2
MTTR
1.116
1.313
0.462
0.992
2.023
0.185
1.499
1.267
1.967
0.284
1.062
0.779
0.216
2.01
2.066
0.931
0.411
0.275
2.025
0.477
WS3
MTBF
MTTR
0.514 0.402
14.055
0.559
21.362 3.115
0.513
0.306
7.568
2.026
0.282
0.686
41.933
1.768
32.091
3.534
0.251
0.156
1.939
0.546
0.513
0.133
4.934
1.67
1.912
5.006
2.809
1.242
1.224
3.545
1.723
1.707
1.041
1.08
1203.164 20.071
0.665
0.41
819.02
3.257
MTBF MTTR
0.527 0.438
68.07 5.268
14.723 2.214
2.49 1.543
7.547 2.013
2.94 1.259
51.842 2.941
12.907
1.48
2.849 1.651
4.334 1.063
8.21
1.967
2.835 0.961
5.209 1.626
2.848 1.291
6.133
1.933
0.782 0.484
0.224 0.154
10.252 0.553
0.341 0.209
232.444 2.593
75
Table B7 Input Data for the 3_WS_CV2_H system
WS1
MTBF
10.503
56.489
30.561
100.124
13.251
9.738
9.298
10.885
12.61
71.604
9.292
132.904
6.055
11.325
8.312
8.197
19.8
5.687
90.951
42.159
MTTR
5.359
12.79
4.919
11.99
4.44
5.006
5.629
5.027
3.794
11.132
6.875
16.18
3.85
3.289
5.299
4.341
7.459
5.539
15.707
6.134
WS2
WS3
MTBF MTTR
10.162
3.95
MTBF MTTR
2.725
6.977
82.524 10.351
197.862
17.33
609.41 36.275
32.252
8.532
14.484
6.218
5.301
2.664
12.985 4.581
35.438
8.287
207.243 15.596
12.583
8.046
2387.262 69.389
8.592 4.426
28.314
5.239
11.35
5.428
3.962
9.391
22.409 6.159
3.222
4.007
271.567 18.031
545.724 29.938
135.303 16.113
850.684 42.109
1045.355 41.172
44.549 10.918
12.844
5.07
10.087
5.247
27.79 9.565
76.575 13.284
203.544 18.746
11.718
7.176
1218.341 36.718
6.139 3.149
35.164 6.535
9.777
5.05
4.103
9.755
16.036
4.807
7.073
5.986
329.87 20.073
327.331
18.86
76
Table B8 Input Data for the 3_WS_CV3_H system
WS1
MTBF MTTR
458.566
16.65
95
18.517
19.862
39.242
49.349
13.022
22.778
16.342
11.957
12.647
24.041
21.287
13.519
9.39
74.257
78.909
46.208
11.318
15.196 11.581
100.915 20.626
45.455
12.19
18.572 16.001
71.345 20.457
47.217 17.301
13.042 10.306
48.338 20.27
30.678 10.567
17.191 16.717
WS2
MTBF
3494.887
23.661
101.422
12.286
21.016
93.927
99.338
163.038
89.209
17.102
16.939
279.746
227.8
13.596
150.541
116.382
25.803
39.833
69.081
19.748
WS3
MTTR
100.417
15.529
17.882
9.647
9.463
21.93
24.536
29.568
15.728
11.966
11.155
31.586
34.917
9.868
26.733
28.094
16.51
13.684
18.203
15.481
MTBF MTTR
1712.149 75.491
17.385 11.588
120.949 20.586
20.77 15.301
36.893 18.473
128.662
25.56
104.107 25.433
134.694 23.538
102.001 21.785
13.532
8.819
27.311 17.603
232.855 26.023
164.669 28.754
11.224
8.291
140.976 24.779
64.236 16.512
13.082
8.494
64.628 17.999
107.418 25.222
18.375 15.343
77
Table B9 Input Data for the 3_WS_CV4_H system
WS1
MTBF
31.962
43.304
260.64
27.075
331.817
28.668
59.854
47.409
137.661
73.829
59.083
490.255
50.148
43.857
36.766
112.026
46.008
275.942
226.944
27.899
MTTR
27.824
24.591
55.276
26.707
54.632
25.812
33.738
30.471
36.318
29.495
27.177
71.194
29.281
22.114
30.574
37.811
31.691
44.929
46.491
25.112
WS3
WS2
MTBF
40.82
66.116
609.744
38.088
MTTR
1042.911
30.089
84.581
61.547
316.483
121.406
131.643
6098.93
55.231
59.953
78.011
42.826
226.121
51.638
1022.251
562.552
27.836
29.159
31.45
64.967
31.419
23.676
37.305
33.82
58.462
37.883
42.419
187.851
27.491
22.777
29.356
46.239
29.134
90.974
75.947
20.791
MTBF
MTTR
40.088 29.697
33.924
75.073
683.994 74.883
32.393 28.725
81.01
1098.878
23.832
19.015
87.816 37.808
55.917 29.928
290.954 52.043
154.155 41.399
96.108 34.967
912.823 79.945
56.997 24.348
78.04 33.315
28.433
43.655
160.928
32.94
35.699 20.147
2012.268 125.105
684.507 64.879
21.961
27.591
fk
Table B 10 Input Data for the 3_WS_CV5_H system
WS1
MTBF
210.87
55.665
65.023
672.385
90.203
206.276
212.762
278.89
167.555
46.893
416.26
225.067
94.266
554.873
136.045
175.168
101.385
185.658
41.602
93.498
MTTR
56.213
40.053
37.233
100.195
38.869
59.016
64.203
74.823
50.216
46.401
83.464
61.148
44.364
87.627
46.608
62.467
51.18
50.076
32.829
45.554
WS2
MTBF
348.525
88.145
84.984
2783.834
177.074
444.566
348.06
448.663
310.381
56.299
1148.937
443.755
MTTR
WS3
MTBF
467.596
58.752
MTTR
85.854
62.716
35.116
51.014
46.403
105.491
41.958
164.477 7441.415 286.652
202.528 59.196
63.453
417.672
83.768
76.228
83.55
62.814 454.244
84.776
79.305 430.087
85.334
66.545 492.895
37.556 33.249
44.608
649.908 87.929
112.087
75.12
464.837
73.005
148.187 58.594
125.661
48.451
2134.361 157.317 1413.894 134.734
73.206
220.647 56.292 296.435
56.55
248.243
60.722 240.768
99.03 41.384
128.929 47.784
65.06
549.829
95.989 346.064
73.835 46.996
60.704
37.844
150.034
51.237
180.531
63.893
79
Table Bi 1 Input Data for the 3_WS_Dis system
WS1
MTBF MTTR
109.513
109.513
51.576
51.576
8.467
8.467
4.42
4.42
22.073
22.073
51.229
51.229
38.033
38.033
8.197
8.197
1.484
1.484
19.086
19.086
WS2
MTBF MTTR
133.804 51.561
0.894
3.818
81.523 51.429
1.448
2.823
53.704
41.65
1.665
1.226
358.421 74.069
14.668
1.393
64.391 49.229
0.74
1.171
WS3
MTBF
3.818
133.804
2.823
81.523
1.665
53.704
14.668
358.421
1.171
64.391
MTTR
0.894
51.561
1.448
51.429
1.226
41.65
1.393
74.069
0.74
49.229
Table B12 Input Data for the 3WS_Sim system
WS1
MTBF MTTR
24.74
153.972
180.243
7.484
97.3
49.437
4.991
21.441
31.894
152.509
WS2
WS3
MTBF
MTTR
MTBF
MTTR
17.604
8.006
16.067
16.067
8.006
57.645
29.433
3.003
29.433
3.003
37.698 6549.276 191.394 6549.276 191.394
3.819
188.466 46.973
188.466
46.973
293.861
31.807
28.091
293.861
31.807
63.804
7.979 777.055
777.055
63.804
2.109
1.013
0.352
1.013
0.352
4.099
8.404
13.192
13.192
4.099
17.262
71.371
31.901
71.371
31.901
154.55
23.354 3964.678
154.55 3964.678
APPENDIX C
Table Cl Input Data for the 10_WS_CV1 system
WS1
MTBF
0.78
0.429
26.544
0.615
WS2
MTTR
0.503
0.125
2.103
0.265
4.447
39.868
5.293
15.497
WS5
1.764
3.584
410.376
0.881
1693.265
1.816
143.23
15.459
2.212
664.869
1.281
14.901
MTTR
0.461
3.332
1430.595 24.766
1.386
0.264
0.234
326.113
6.108
0.534
1.942
0.951
1.115
4.347 0.691
5.006 5233.805
39.03
2.023
15.75
2.701
1.609
994.893 15.143
1.122
0.744
MTBF
MTBF
MTTR
0.861
0.42
3.831
0.21
16.497
0.681
8.463
0.593
0.428
18.34
WS6
WS4
WS3
MTBF MTTR
1.315
2.652
3.652
0.71
1138.665 17.563
4.892 0.751
75.969 5.509
1.478
6.207
200.641
16.088
1491.297
0.791
0.582
3.762
2.711
26.483
MTBF
1.826
39.299
766.908
17.697
16.58
1.875
87.96
219.361
1.505
392.507
MTTR
0.909
2.962
18.015
2.896
1.041
1.118
3.469
3.034
0.369
6.521
WS8
WS7
MTBF MTTR
MTBF MTTR
MTBF MTTR
0.531
0.286
6.794 2.499
1.91
0.625
5.247
8.219
1.785
1.966
0.368
79.822
30.71
5506.876 35.929 4828.942 46.284 3398.558
0.415
3.036
1.88
1.244
0.7
0.395
24.044 2.762
4.558
0.456
942.259 13.486
3.043
1.226
0.454
1.472
0.222
2.7
1.646
61.741
0.293
0.19
5.748
1.692
242.534
61.26
1.394
8.807
0.287
7.128
7.001
2.651
3.595 0.576
1.689
14.196
5.267
811.049 17.469
954.298 21.802
177.581
WS9
MTBF
5.853
10.455
45.028
1.456
5.121
2.597
17.137
52.506
4.88
583.576
MTTR
2.245
1.619
0.822
0.313
0.179
1.051
3.172
1.442
1.035
14.265
WS1O
MTBF MTTR
1.003
2.965
81.121
3.897
22.783
1526.834
2.799 0.797
33.547 3.441
2.133
5.505
28.465 4.287
184.401
2.614
10.755
4.274
1.894
0.177
Table C2 Input Data for the 10 WSCV2 system
WS1
WS2
MTBF
4.074
34.446
23.595
MTTR
17.925
8.687
19.839
10.086
5.302
9.838
8.608
5.591
3.959
WS5
3.67
4.824
9.02
4.729
2.948
4.26
4.259
6.718
MTBF
8.292
624.261
77.421
52.868
23.246
545.518
21.115
14.499
18.669
10.636
MTBF
MTTR
3.587
2.654
31.187 1154.282 45.751
79.468 13.391
13.278
7.501
9.139
38.342
74.021 12.584
8.813
32.167
45.44 6.134
8.658
3.915
40.358
5.37
3.411
6.781
28.704 6.467
5.115
4.78
13.605
6.78
MTTR
6.655
WS6
MTBF MTTR
MTBF MTTR
4.467
3.31
3.791
2.214
220.406 14.603 1199.355 29.955
34.179
6.618
39.501
9.527
114.122 12.858
37.036
6.053
23.608
6.252
20.479 4.794
231.234 15.739
51.211
8.574
232.605 20.126
43.644 5.729
16.215
7.524
4.985
3.189
50.218
8.554
35.691 10.597
4.445
2.813
10.268
4.698
WS9
MTBF
11.106
8244.169
39.072
45.193
26.288
76.498
261.41
10.769
64.058
7.982
WS4
WS3
MTTR
7.152
89.457
8.285
10.513
8.329
12.049
20.986
7.099
13.473
4.55
MTBF MTTR
4.883
3.039
761.878 34.893
23.177
5.69
180.136 16.354
68.538 14.036
419.042 24.631
118.095
11.388
9.266
5.945
11.535
7.309
3.258
3.807
WS7
WS8
MTBF MTTR
4.593
8.547
25.025
687.037
68.249 12.745
MTBF MTTR
6.623 4.467
1234.089 29.266
49.212
7.887
84.793 10.716
30.499 8.656
6.116
60.073
98.393
8.816
8.608
5.631
24.622
5.274
4.642
8.321
175.471
40.45
49.633
60.132
3.314
31.959
10.958
18.461
6.958
5.705
9.103
2.282
5.426
5.117
WS1O
MTBF MTTR
3.081
5.102
1768.759 56.898
64.016 11.276
35.561
8.345
8.114
45.84
158.552 9.787
107.797 12.069
7.247 3.218
9.002
25.098
7.485
10.853
Table C3 Input Data for the 1 OWSCV3 system
WS1
MTBF
12.323
21.252
54.972
51.956
27.102
66.054
39.722
15.129
30.001
20.675
WS2
MTTR
11.102
11.392
21.014
16.205
12.352
15.747
11.609
12.157
12.986
16.136
WS5
MTBF
14.25
87.857
104.149
312.081
67.834
691.8
582.292
39.161
142.68
15.465
MTBF
19.961
MTTR
16.02
22.82
9.903
185.755 31.856
145.655 25.178
54.667 20.725
1299.979 76.654
83.108 15.408
36.324 16.987
57.89 15.862
30.709 13.803
WS6
MTTR
10.559
22.757
20.166
35.162
17.963
47.088
50.383
18.17
24303
9.788
MTBF
14.936
101.008
98.486
123.635
68.115
146.087
161.299
16.362
82.136
29.779
MTTR
8.724
23.998
23.752
20.207
15.945
24.459
21.173
10.468
24.387
13.624
WS9
MTBF MTTR
26.395 16.999
29.218 12.947
105.935 22.464
109.609 25.497
65.062 20.613
194.401 30.619
659.631 52.955
25.616 16.887
145.752 30.654
22.778 12.985
WS3
MTBF
12.651
66.018
190.937
110.531
181.438
160.946
107.248
17.12
84.695
33.809
MTTR
9.359
17.521
32.173
21.625
30.846
21.725
23.007
10.875
19.083
16.848
WS7
MTBF
24.47
73.348
162.684
427.436
MTTR
13.148
20.606
30.381
44.971
124.95 21.492
193.313 22.221
172.469 26.108
12.634
8.699
110.784 18.808
30.597 14.289
WS1O
MTBF MTTR
17.115 10.334
100.675 23.857
161.865 28.511
93.774 22.005
131.62 23.297
612.746 37.825
302.949 33.918
24.912 11.064
59.11 21.202
25.268 17.427
WS4
MTBF
16.429
42.377
70.588
480.361
154.724
1102.723
353.947
26.868
33.207
18.059
MTTR
10.223
19.2
17.329
43.611
31.685
64.818
34.573
17.244
11.674
11.564
WS8
MTBF
18.741
67.98
147.237
MTTR
12.64
17.113
23.598
240.579 30.404
76.057 21.587
237.25 24.155
342.913 30.726
22.297 14.585
80.47 17.236
23.612 13.172
84
Table C4 Input Data for the 1 0_WS_CV4 system
WS1
MTBF
31.646
108.297
31.686
59.129
66.563
24.596
31.962
59.083
27.227
26.177
MTTR
23.817
35.223
26.654
22.599
24.35
22.761
27.824
27.177
26.513
23.995
WS5
MTBF
65.872
141.917
58.19
205.676
878.509
32.207
39.041
262.311
49.611
46.601
MTTR
3 1.876
35.722
32.661
36.995
84.667
23.285
28.211
44.156
29.135
29.383
WS4
WS2
WS3
MTBF MTTR
39.36 21.075
145.134 32.319
33.413 24.312
310.859 47.685
133.471 39.558
53.407 29.698
52.383 30.479
305.976 58.216
32.442 28.087
40.737 29.619
MTBF MTTR
59.297 32.678
389.895 54.301
35.301 23.689
218.586 48.399
78.45
783.352
24.54
31.226
45.885 30.306
121.036 37.745
33.789 20.479
37.958 27.952
WS6
MTBF
83.097
428.205
49.525
190.135
248.992
39.812
48.293
76.503
41.654
42.043
MTTR
36.572
59.789
30.568
46.508
41.74
29.164
30.624
29.481
26.517
32.382
WS9
MTBF MTTR
65.383 28.316
130.441
32.28
35.727 22.702
126.727 38.579
228.803 43.253
56.083 31.949
49.893 28.723
236.807 40.76
36.429
21.9
33.618 21.408
WS7
MTBF
55.802
137.96
45.355
111.627
212.471
34.517
62.747
157.509
48.167
38.213
MTBF
40.937
675.827
59.166
140.947
377.839
47.788
MTTR
22.976
65.95
33.398
35.789
53.282
26.458
34.481 22.809
335.669 58.213
42.462 29.317
48.607 29.365
WS8
MTTR
MTBF
MTTR
27.294
32.928
32.575
33.709
50.388
21.379
31.224
35.866
28.027
40.85 1
20.889
55.584
26.697
34.528
52.129
22.081
24.532
31.115
19.972
22.1
WS1O
MTBF MTTR
61.998 32.831
420.577
59.72
34.325 20.149
282.555 56.812
157.87 42.236
29.18
48.464
33.357 19.442
83.711 29.436
27.57
38
27.817 21.98
277.099
45.496
174.522
327.407
32.257
43.588
85.108
34.277
29.925
19.565
Table C5 Input Data for the 10_WSCV5 system
WS1
MTBF MTTR
47.996 46.339
71.832 48.839
76.121
43.12
57.729 36.266
173.36 50.637
129.56 49.002
137.915
126.548
126.737
128.123
53.045
42.598
48.068
43.286
WS5
MTBF
73.928
104.435
114.858
143.74
834.173
652.449
410.159
522.103
891.721
734.772
MTTR
51.499
47.681
55.62
53.26
97.656
99.26
79.748
87.004
94.155
102.535
WS2
MTBF
66.174
105.96
138.488
134.577
373.871
974.763
213.849
204.052
913.32
375.834
MTTR
50.561
148.841
189.696
374.533
247.171
230.22
389.923
443.262
1293.381
MTBF
63.252
91.817
51.206
56.622
109.243
48.429
98.413
83.613
372.48
118.878 312.866
57.362 1219.868
52.368 278.174
244.118
101.391
68.602 388.178
WS6
MTBF
41.974
128.648
WS4
WS3
MTTR
34.517
46.039
45.717
61.452
70.052
70.139
56.212
75.108
78.503
129.138
WS9
MTBF
MTTR
76.051
78.756
128.85
97.953
591.545
701.297
923.254
444.304
268.788
1467.337
48.167
45.605
49.025
52.73
91.629
86.771
115.294
71.265
58.543
130.369
MTTR
MTTR
40.325
39.808
39.785
42.75
57.384
51.083
52.43
39.716
140.101
72.357 2173.361 163.829
68.877
317.227 77.212
359.506 80.822
134.191
302.796 71.826
70.38
311.793 74.777
61.702
67.371 1875.114 132.842
WS7
MTBF
76.466
100.004
241.968
207.687
3002.533
523.953
MTBF
47.796
86.389
155.986
MTTR
49.574
46.94
64.601
66.922
197.349
93.208
44.265
140.851
273.379 57.865
1084.378 116.454
560.964
97.952
WS1O
MTTR
MTBF
58.34 48.527
92.912
39.576
198.524 56.068
83.819 41.419
5000.063 240.205
719.029 104.531
48.597
166.361
58.299
239.253
56.295
243.849
110.95
1070.278
WS8
MTBF
85.367
138.325
143.417
158.236
350.464
197.028
808.265
278.627
452.356
491.249
MTTR
52.884
55.73
51.284
48.578
76.102
49.909
114.47
66.085
74.377
89.842
Table C6 Input Data for the 1 0_WS_CVO5 system
WS1
MTBF MTTR
40.496 29.978
192.325 64.653
9.674
6.215
14.045
3.731
17.875
8.316
10.42
7.168
56.263 42.386
78.454 42.125
110.784 29.811
111.991
33.791
WS5
MTBF
16.216
108.405
102.639
1027.865
130.014
19.837
6.465
9.06
239.084
2635.436
MTTR
9.157
15.368
WS2
MTBF
0.412
1212.072
24.63
22.371
188.134
9.675
MTTR
0.227
96.131
12.751
3.52
43.876
3.96
55.631 33.321
124.401 38.384
1106.189 68.197
25.087 3.462
WS4
MTBF MTTR
6.491
10.837
6.969
0.96
6.266
2.067
305.611 56.381
7.676
1.786
0.986
0.54
0.533
0.93
75.93 31.945
228.865 26.761
5.805
70.512
MTBF MTTR
92.705 44.484
120.096 13.044
2.497
0.986
80.938 13.499
118.596 43.401
WS7
WS6
MTBF
4.26
41.697
34.524
222.089
157.009
143.234
78.793
WS3
MTTR
2.779
3.904
15.228
44.836
52.98
57.907
45.606
0.296
36.437
114.368
49.595
7.946
4.121
2.158
1.064
19.322 3327.876 183.731
133.264
95.605
20.478
WS9
MTBF
MTTR
86.012
45.306
557.849 74.282
45.524
19.12
693.976
74.68
30.86
6.456
53.216 25.563
43.142 20.374
142.776 42.442
374.641
75.982
3837.041 183.516
MTBF
64.863
1866.338
2.275
428.508
75.592
47.066
0.712
58.95
766.676
121.489
MTTR
129.131
55.577
123.181
404.715
66.601
53.771
30.534
51.058
62.307
12.273
WS8
MTBF
2.583
71.868
MTTR
1.287
17.876
3.337
28.037
154.917
0.946
6.961
35.244
84.807 1987.914
20.86 125.043
26.578
36.31
20.111
74.339
0.455
39.42 25.808
25.836 178.859 45.652
2093.03 141.033
99.1
296.08
60.943
23.811
WS1O
MTTR
MTBF
52.802 34.273
203.025
35.456
23.13
9.099
1668.385 152.507
48.736
198.583
17.813
33.625
17.432
33.382
72.886
277.213
386.524 70.732
2.468
14.911
E:A
APPENDIX D
The exact expressions for the first two moments of the inter-departure times from WS 2
were evaluated from the probability distribution derived.
First moment of the inter-departure time distribution:
First, the quantity
cP(k
c) is evaluated.
cP(k = c)
P(1_f2)[(1__ri)c_2ri} +(1_P)f2[(1_r2)c_2r21
=c +ff2[(1r3{((1iy3i)
c=4
ci
c-4
(lr2)'r2 +((1r2)'2r2)(lr1)r1} +r1{(1_r2)c_2r2}]
1P(-1 + ,)2(1 +3i)(i(-1+ r2) r2)r2
1
_f2ri(_1+r2)2fri (l-2i
Next, the first moment of the inter-departure times is evaluated as shown below.
cP(k = c)
(1 P )(1 f2)
+2(Pe(1f2)T +(1P)f2r2 +Pf2ir2)
e
+3)IP(lf2)(lr1)r
+(1Pe)f2(1r2)r2
+ r2(1 r2))) rl(1_r2)r2)}
IP(_l+r1)2(l+3,)(r1(_1+r2)_r2)r2
+
1
r1(ri(-1+r2)r2)r2
(1)
1
f2r1(-1+r2)2(r (--1-2r1 +Pe(-1+ri)2(1--3ri))r2
I
L+3(-1+1(-1+)2)(-1 +)r22))
I
j
As shown previously,
__=________________
X
(1,r0 r1)(rj +,r1)+(,r1 +,r,1)r1
>2
>2
The exact expressions (in terms off1
,
,
f2 , r) for each of the terms in the right hand
side of the above equation has been given in the Markov chain model (Appendix A).
Substituting these expressions in equation (1) above we get,
E[kJ =1+
Second moment of the inter-departure time distribution:
First, the quantity
c2P(k
= c) is evaluated.
c2P(k = c)
P(1_f2)[(l_,)c2r1] +(1_Pe)f2[(1_r2)c_2r2]
=c2 +Pf2[(lr1){((lr1y3r1)
c=4
c-I
c-4
(1 r2)r2 +((l r22r2)(l
+ri{(l_r2)c_2r2}]
2
Ti
2 + r2 (5 + 9r2)
2
f(_l+r32(_2_9,i2(_1+r2)2 r2(5+9r2)+i(-1+r2)(5+18r2))
(ij +r2
l2)
Next, the complete expression for the second moment of inter-departure time distribution
is evaluated as shown below.
c2P(k = c)
=12(1_ P )(1 f2)
+22(Pe(1f2)1i +(1-P)f2r2 +Pf2r1r2)
32JP(1_f2)(1_i)ii +(1-P)f2(1-r2)r2
+r2(1_r2)))+(1_r2)r2)}
+
(_1+)2 (2+(S+91))f(1
Ti
)2 *
2
2+ r2 (5 + 9r2)
2
12
r2(5+9r2)+,(-1+r2)(5+18r2))
(ij+r2ir2)2
Simplifying equation (2) above we get,
E[k2}=
r22+f2(2+r2)p12
r2
++ f2r2(ii-1)f2(2+ii)
(r+rrr)2
1
(2)