CO DE: a decision support system for collaborative design 2
advertisement

Journal of Engineering Design
Vol. 00, No. 0, Month 2008, 1–18
CO2 DE: a decision support system for collaborative design
Duck Young Kim* and Paul Xirouchakis
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
Ecole Polytechnique Fédérale de Lausanne (EPFL), Institut de Génie Mécanique, STI-IGM-LICP,
Station 9, CH-1015, Switzerland
(Received 17 December 2007; final version received 16 April 2008 )
This paper introduces an easy-to-use decision support system for COllabOrative DEsign named CO2 DE.
We examine the system particularly for the design concept filtering and selection stages considering the
importance of conceptual design although the proposed framework can facilitate a design task, which
is recurrent in many design phases. First, the paper briefly reviews what methods can be applicable to
each step of the conceptual design process, and then describes the prerequisites for mathematical methodbased design concept filtering and selection processes. Secondly, detailed explanation about the process
and main modules of the proposed system are provided with a small satellite design case study focusing
on (1) what the inputs and outputs of each module are, (2) what information should be specified by
design participants, and (3) what results can be obtained from the system. Thirdly, the paper discusses the
advantages/limitations of the system and the main difficulties and barriers for the future implementation.
Finally, the paper provides a useful guideline to those who want to develop a decision support system for
collaborative design by which they can minimise the need for critical refinement and serious modifications
of the design at the subsequent design phase.
Keywords: collaborative design; decision support system; filtering procedure; design concept selection;
decision; satellite
1.
Introduction
Product design requires concurrent participation of many experts from multidisciplinary backgrounds because of the necessity of a large amount of different types of knowledge. For example,
developing a satellite is one of the complex tasks that requires various kinds of knowledge,
such as astrodynamics, thermodynamics, electronics, mechanics, space environmental engineering, manufacturing, reliability engineering, and cost engineering. In other words, mechanical
and electrical designers must collaborate with environmental engineers in order to determine the
overall performance of a satellite at the design stage.
Moreover, there is no doubt that this collaboration should be started from the conceptual design
phase because (1) design decisions are not achieved by sharing only the final results made by each
design participant but rather by eliciting a satisfactory solution cooperatively under a common
understanding of the design problem and (2) most of the life cycle cost of a product can be
predetermined by the end of the conceptual design phase. For example, many satellite models are
*Corresponding author. Email: duckyoung.kim@epfl.ch
ISSN 0954-4828 print/ISSN 1466-1837 online
© 2008 Taylor & Francis
DOI: 10.1080/09544820802132444
http://www.informaworld.com
2
D.Y. Kim and P. Xirouchakis
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
not usually intended to be mass-produced, but to accomplish special mission objectives, such that
the new satellite development process should be carefully planned and systematically executed
from the conceptual design stage.
Therefore, it is highly required to develop a decision support system for collaborative conceptual
design that can help the design participants (1) find feasible design concepts with respect to various
design constraints and (2) select the best design concept considering multiple design participants
and their different design criteria.
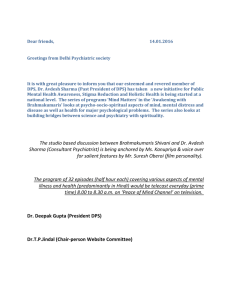
Let us begin with a brief review of the conceptual design process. In general, the systematic
conceptual design process can be outlined by the following steps (Figure 1):
• The first step of the conceptual design phase is to generate design concepts explicitly based
upon:
◦ the identification of functional requirements, which can be specified by fuzzy customer needs
and by means of analyses made by various company departments concerned,
◦ the establishment of function structures by decomposing the overall function into the set of
sub-functions,
◦ the search for appropriate design principles (DP) for each sub-function,
◦ their combination (design concept) and the filtering of incompatible design concepts in order
to elaborate the overall function on the basis of the validation of compatibilities against
specified design constraints and criteria.
Figure 1.
Snapshot of a small satellite conceptual design process modelling.
Journal of Engineering Design
3
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
• During the second step of the conceptual design phase one has to select the best design concept that does minimise the need for critical refinement and serous modification at the next
design phase, does best fit with the objectives of the organisation and helps the company gain
competitive advantage in the long run.
In short, conceptual design is a transformation process of the system specification into functional
structures and engineering constraints of the overall function of a system. It involves two main
steps: (1) generation of design concepts and (2) selection of the best one.
There is no doubt that the major part of conceptual design relies on human creativity, namely,
idea generation. Conceptual design, however, is never achieved solely by designer’s creativity but
also by rational decision-making efforts in order to select the best design concept as highlighted in
grey in Figure 1. Particularly, this selection procedure can be more significant when the designers
try to modify/rearrange something that pre-exist(s) for improvement (adaptive design, variant
design, redesign, selection design, configuration design) rather than to create something new
(original design, creative design, innovative design).
First, in order to generate design concepts, obtained by combining compatible sub-function
DP, a systematic method to quantitatively evaluate the compatibility of a DP with the other DPs
should be defined (filtering). After that, in order to select the best design concept, it is essential
to adapt multiple criteria decision aiding methods (e.g. outranking methods) to the conceptual
design phase (selection). In particular, they should take into account the uncertainty in the values
of design parameters and criteria evaluations during the conceptual design phase.
Note that CO2 DE aims to support design participants, not to replace them, during the filtering
and the selection processes by means of a systematic and consistent decision-making procedure
and easy-to-use system interface (e.g. Microsoft Excel™ -based user input/output interface and
decision result visualisation).
2.
Related work
2.1. Applicable methods
Various formalised methodologies can be applicable to the five steps of the systematic conceptual
design process in Figure 1: (1) product specification, (2) function structure definition by decomposition, (3) DP search, (4) combination of compatible DP by filtering, and (5) selection of the
best design concept. More detailed reviews are provided for the last two steps considering the
scope of this paper. Note that at this point the term ‘formalised’ implies the transformation of
unstructured design activities into structured and measurable ones.
(1) Product specification
For the product specification step to define the overall function, the comprehensive matrix
form (house of quality) of quality function deployment (QFD) methods are well founded
where relationships between the customer’s requirements and technical attributes and tradeoffs among technical attributes are well described. Therefore, QFD methods can be utilised
directly to convert customer requirements to functional requirements and measurable design
targets during the product specification stage.
(2) Function structure definition by decomposition
The first concern of design verification during the conceptual design stage is to establish a valid
function structure, which entails logical and physical considerations as well as matching inputs
and outputs among sub-functions. In fact, the verification process of a function structure, a
part of design verification, can be viewed as a functional decomposition technique, which
aims to break an overall function down to functionally independent sub-functions as finely
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
4
D.Y. Kim and P. Xirouchakis
as possible (Ullman 1992). Any flow analysis method such as bond graph and Petri nets
(Bracewell and Sharpe 1996, Deng et al. 2000) is applicable to this procedure. The following
three modularity methods are also applicable: function structure heuristic method (Stone et al.
2004), design structure matrix (Ulrich and Eppinger 2004), and modular function deployment
(Ericsson and Erixon 1999).
(3) DP search
Once a valid function structure is established, DPs, to fulfil the sub-functions, have to
be searched using creative and systematic thinking procedures such as brainstorming,
morphological analysis, and Theory of Inventive Problem Solving (TRIZ) (Altšuller 1984).
(4) Combination of compatible DPs by filtering
Any combination of DPs of all sub-functions can be a potential solution for the overall
function. The number of all possible combination of DPs grows drastically both with the
number of sub-functions and with the number of DPs of each sub-function. Therefore, it is
necessary to accelerate the search procedure in order to mitigate the verification process of
the compatibility between DPs. In this case, various constraint-based approaches (e.g. Kim
et al. 2006) can be usefully applied where the focus is on how to handle a large constraint
network that consists of a group of variables whose values are taken from finite domains and
a set of constraints on their values. Constraints here render a basis to represent compatibility
between DPs.
Several decomposition methods, based on the dependencies of design variables, are used to
divide an original design problem into a set of small ones in order to alleviate computational
complexity (Michelena and Papalambros 1997) and graph-theoretic techniques are used to
search for an easier solution path (Reddy et al. 1996, Finch and Ward 1997). After a design
problem is decomposed into a set of smaller ones based on variable dependencies, each small
problem, formulated as a classical constraint satisfaction problem (CSP), can be practically
handled by backtracking algorithms and consistency techniques (e.g. Nadel and Lin 1991). In
another way of problem reduction techniques, the design constraints are divided into hard and
soft ones. The former have to be satisfied under all circumstances but the latter should be taken
into consideration whenever possible. In this regard, the soft constraints can be represented
by user preferences. The solution procedure is achieved by relaxing the soft constraints until
the solution becomes acceptable (Parunak et al. 1997). In general, the above conventional
constraints-based design approaches do not deal with the characteristics of the combination
problem during the filtering procedure, but rather they can be useful to search the feasible
solution(s) in a given single combination of DPs (a design concept), which will be usually
carried out during the subsequent embodiment and detailed design stages.
In this regard, many methods for configuration design and catalogue selection design can be
more attractive to the filtering procedure because of their similarity. The main goal of these
methods is to select suitable components from a set of pre-defined components (components
off the shelf) to achieve overall functional requirements. Mittal and Falkenhainer (1990) introduced dynamic CSP (renamed conditional CSP later) where constraints are not fixed a priori,
and thus an active set of constraints and their associated variables can change dynamically in
response to decisions made during the course of problem solving (e.g. requirement change
such as ‘luxury car’ and ‘sport sedan’). Several researchers have agreed to this notion as a
fundamental feature of configuration design problems (Snavely and Papalambros 1993, Darr
and Birmingham 2000).
(5) Selection of the best design concept
As mentioned before, the selection process of the best design concept involves the simultaneous consideration of multiple criteria and requires concurrent participation of individuals
from multidisciplinary backgrounds. Regarding the characteristics described above, a class
of such problems, from the operations research and management science perspectives,
Journal of Engineering Design
5
is multiple criteria decision-making (MCDM) and group decision-making (GDM), namely
multiple criteria group decision-making. Naturally, many studies (e.g. Pahl and Beitz 1988,
Ulrich and Eppinger 2004) on the design evaluation method have employed MCDM and
GDM methods. However, it does not mean that design evaluation problems for the selection
process can be directly converted to these classes of problems but rather these methods should
be appropriately modified and extended considering the characteristics and assumptions of
product design decision problem settings.
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
2.2. Summary
It can be criticised that constraint-based design approaches basically presume that all constraints
and variable domains are well defined, which is usually not the case in the early design stages.
However, there can be little doubt that the above approaches are meaningful since the main goal
of the design constraint checking procedure in the early design phase is not assigning exact values
for all design variables, but rather eliminating incompatible combinations as many and as early
as possible, which can be achieved even with rough variable domains and constraints.
However, the main problem in applying the notion of conditional CSP directly to the filtering
procedure is that the given constraints in conditional CSP (Sabin and Freuder 1996) are oversimplified, such as ‘only gasoline engine, not diesel engine, is valid for sport car design’ and ‘package
option A is only compatible with battery type A’. This type of design constraints implies that the
compatibility of a certain pair of DPs is given a priori. For example, it can be said that in Table 1,
the following information: PL1 and ADCS2 are compatible but PL1 and ADCS1 are not, is given
in advance, so that the original problem can be straightforwardly reduced. Conversely, during
the filtering procedure, designers must evaluate the compatibility of DPs considering the design
constraints for themselves. Furthermore, it can be said: what are changing dynamically are not the
design constraints, but the domains of design variables according to what DPs are included in the
combination of DPs. For example, the difference between the CSP composed by PL1, ADCS1,
CDMS1, COM1, EPS1, and GS1 and the CSP composed by PL2, ADCS1, CDMS1, COM1,
EPS1, and GS1 is the only domain of the design outputs (DO) in the last two columns of Table 1,
but not the design constraints in Table 2.
Furthermore, it is very important to note that conventional computing-based approaches (e.g.
commercial optimisation software) do not fit with the selection process of the conceptual design
stage because (1) each design concept is a combination of different DPs such that there is no
direct relation† between different design concepts and (2) design teams should take into account
multiple (often conflicting) criteria during the selection process of design concepts.
In this regard, the developed system, CO2 DE aims to cope with the above limitations of current
researches and computational tools for the direct usage in the filtering and selection processes of
conceptual design from a practical point of view.
3.
Filtering and selection problem
3.1. Prerequisites for the filtering and selection processes
The results of carrying out the three steps of the conceptual design process in Section 2.1: (1)
product specification, (2) function structure definition by decomposition; and (3) DP search, will
† Direct relation here means derivative information for a search process. However, during the conceptual design process,
an algorithm has no information about which design concept is the next to be evaluated after evaluating one design concept.
6
D.Y. Kim and P. Xirouchakis
Table 1. A design catalogue for a small satellite design.
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
Sub-function (Fi )
Design output (DOi,k )
Design principle (DPi,j )
DP1,1 : PL1
[3 . . . 6]
{0.01, 0.05, 0.1}
{400, 1000}
{3, 4, 5, 6}
[100]
[−5 . . . − 4]
[−5 . . . − 4]
[5 . . . 10]
{2, 3, 4, 5}
DP1,2 : PL2
[5 . . . 7]
{0.2, 0.3}
{400, 1000}
{5, 10}
[110]
[−5 . . . − 4]
[−5 . . . − 4]
[8 . . . 12]
{2, 3, 4, 5}
point stability (deg/s)
mass (g)
centre of mass. X
centre of mass. Y
energy consumption (mWh)
slot ID (location)
DP2,1 :ADCS1
[0.01 . . . 0.05]
[70]
[−3 . . . − 2]
[−3 . . . − 2]
[3 . . . 5]
{1, 2, 3}
DP2,2 : ADCS2
[0.03 . . . 0.07]
[80]
[−3 . . . − 2]
[−3 . . . − 2]
[3 . . . 5]
{1, 2, 3}
DO3,1
DO3,2
DO3,3
DO3,4
DO3,5
DO3,6
data storage (Kbits)
mass (g)
centre of mass. X
centre of mass. Y
energy consumption (mWh)
slot ID (location)
DP3,1 : CDMS1
[630 . . . 660]
[30]
[−1 . . . 0]
[−1 . . . 0]
[4 . . . 7]
{3, 4, 5}
DP3,2 : CDMS2
[680 . . . 720]
[40]
[−1 . . . 0]
[−1 . . . 0]
[6 . . . 8]
{3, 4, 5}
Communicate with the
ground stations (COM)
DO4,1
DO4,2
DO4,3
DO4,4
DO4,5
DO4,6
data rate (kbps)
mass (g)
centre of mass. X
centre of mass.Y
energy consumption (mWh)
slot ID (location)
DP4,1 : COM1
[0.7 . . . 1.3]
[70]
[2 . . . 3]
[2 . . . 3]
[5 . . . 7]
{4, 5, 6}
DP4,2 : COM2
[1 . . . 1.5]
[80]
[2 . . . 3]
[2 . . . 3]
[8 . . . 10]
{4, 5, 6}
F5
Generate, store, regulate and
distribute electrical power (EPS)
DO5,1
DO5,2
DO5,3
DO5,4
DO5,5
mass (g)
centre of mass. X
centre of mass. Y
energy consumption (mWh)
slot ID (location)
DP5,1 : EPS1
[250]
[−1 . . . 0]
[−1 . . . 0]
[90 . . . 120]
{1, 2, 3}
DP5,2 : EPS2
[260]
[−1 . . . 0]
[−1 . . . 0]
[110 . . . 140]
{1, 2, 3}
F6
Communicate with the
satellite (ground station)
DO6,1
number of ground station
F1
Carry out the mission
(payload)
DO1,1
DO1,2
DO1,3
DO1,4
DO1,5
DO1,6
DO1,7
DO1,8
DO1,9
size of an image (Kbits/image)
integration time, Tint(s)
altitude (km)
resolution (km/pixel)
mass(g)
centre of mass. X
centre of mass. Y
energy consumption (mWh)
slot ID (location)
F2
Determine and control the
attitude (ADCS)
DO2,1
DO2,2
DO2,3
DO2,4
DO2,5
DO2,6
F3
Process and distribute
command (CDMS)
F4
DP6,1 :GS1
{2, 3, 4}
become the input information for the filtering and selection process. That is to say, this information
is the prerequisite for CO2 DE and contains the following:
• Function structure: the function structure of an overall function and inter-relationships (global
design constraints) between the sub-functions should be identified by means of appropriate
decomposition methods.
• Design principles: it is necessary to search as many design alternatives for each sub-function
as possible, e.g. active/passive control system for determining and controlling the attitude of a
satellite.
• Design variables: in contrast to the design variables which do not influence the designer’s
decisions of other sub-functions (local design variables), global design variables (=local DOs)
are inter-related interface variables that enable the functional interaction of the sub-functions
Journal of Engineering Design
Table 2.
7
Design constraints for a small satellite design.
C1 (data storage): DO3,1 ≥ 452.2497 · DO1,1 /DO1,4
C2 (required no. of ground station): DO6,1 · DO4,1 · DO1,4 ≤ 1.363532 · DO1,1
C3 (pointing accuracy):
sin−1
40 · DO1,4
(6378 + DO1,3 )2 − (6478)2
C4 (pointing stability): DO2,1 ≤ 0.3 sin−1
≤ 3◦
DO1,4
(6378 + DO1,3 )2 − (6478)2
DO1,2
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
C5.1 (centre of mass):
DO1,5 · DO1,6 .x + DO2,2 · DO2,3 .x + DO3,2 · DO3,3 .x + DO4,2 · DO4,3 .x + DO5,1 · DO5,2 .x ≤2
DO1,5 + DO2,2 + DO3,2 + DO4,2 + DO5,1
C5.2 (centre of mass):
DO1,5 · DO1,6 .y + DO2,2 · DO2,3 .y + DO3,2 · DO3,3 .y + DO4,2 · DO4,3 .y + DO5,1 · DO5,2 .y ≤2
DO1,5 + DO2,2 + DO3,2 + DO4,2 + DO5,1
C6 (mass): DO1,5 + DO2,2 + DO3,2 + DO4,2 + DO5,1 ≤ 1 kg
C7 (energy consumption): DO1,7 + DO2,4 + DO3,4 + DO4,4 ≤ DO5,3
C8.1 (distance constraint for configuration): DO1,8 − DO3,5 ≤ 2
C8.2 (distance constraint for configuration): DO1,8 − DO4,5 ≤ 2
C8.3 (distance constraint for configuration): DO3,5 − DO4,5 ≤ 2
C8.4 (distance constraint for configuration): DO1,8 = DO2,5 = DO3,5 = DO4,5 = DO5,4
Note: The important local design constraints C3 is included in the list of global design constrains, without loss of generality.
•
•
•
•
within a function structure. Characteristics of each sub-function can be described by a set of
local DOs, e.g. size of an image (kbits) and integration time (s) for the payload subsystem of
a satellite. It is worthy to note that Harmer et al. (1998) assumed in their component selection
problem that the design of a product (or component) from scratch might involve satisfying
a number of inter-related design requirements, but a suitable product can be selected from a
catalogue by defining a few parameters (a few design variables).
Design constraints: the values of local DOs are restricted by the global design constraints.
Each constraint is represented as a relationship between local DOs, e.g. SUM (mass of each
subsystem) < constant K(g). We will call those design constraints that restrict design variables
of single sub-function local design constraints.
A set of global decision-makers: a global decision-maker can be seen as an individual or a
team which has a set of different global criteria reflecting his or its own interests and priorities.
The group of global decision-makers consists of multidisciplinary participants or teams from
engineering, manufacturing, marketing, and so on.
Global design criteria: basis of decision to select the best design concept, for example, design
team may want to reduce the overall energy consumption and minimise the total mass of a
satellite.
A set of performance evaluations of design concepts for each criterion: e.g. if a global decisionmaker has ‘total mass’as a global criterion, then it is necessary for him to define how to evaluate,
8
D.Y. Kim and P. Xirouchakis
i.e. measure the level of performance for ‘total mass’ of each design concept, even if the result
of measurement is too rough, non-deterministic or qualitative. Next, a preference function
(a sort of mapping function) that associates each level of performance with a preference score
is needed. Note here that levels of performances are very often related with the values of global
design variables or output values derived by the relationships (certain equations or logical
relations) among global design variables.
• Two types of preference aggregations: aggregation over global criteria of each global decisionmaker and aggregation over global decision-makers.
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
3.2. Small satellite design problem
This section introduces a small satellite design problem that will be used to show how CO2 DE
can support the filtering and selection processes.
According to Sarafin (1997), the payload to carry out the mission is the starting point for
satellite design; it will determine satellite attitude, weight, power, communication data rates,
and so on. The primary mission of the small satellite design study (Noca and Krpoun 2006,
http://swisscube.epfl.ch) is the observation of the nightglow phenomena that will be measured
continuously over at least one orbit. Design requirements given a priori are as follows:
• Explicit
◦ Overall size: 10 × 10 × 10 cm
◦ Less than 1 kg
◦ Centre of mass must be <2 cm away from the geometric centre
• Implicit
◦ Must be size-compatible with P-Pod (Picosatellite orbital deployer)
◦ Safety
◦ Environment
3.2.1. Function structure and subsystems
Because of the complexity of a satellite design, this paper considers only six main sub-functions
of a small satellite:
(1)
(2)
(3)
(4)
(5)
(6)
carry out the mission (payload),
determine and control the attitude (attitude determination and control subsystem),
process and distribute command (command and data management subsystem),
communicate with the ground stations (communication subsystem)
generate, store, regulate, and distribute electrical power (electrical power subsystem)
communicate with the satellite (ground station).
Note that a subsystem is the embodiment of one or more sub-functions, but we assume that each
subsystem has one sub-function. The combination of individual sub-functions results in a function
structure representing the overall function. There can be various different function structures of
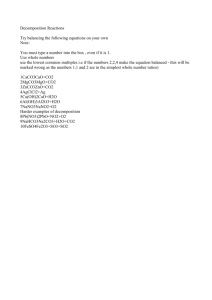
a small satellite depending on the design teams’ creativity and engineering knowhow. Figure 2
illustrates a function structure example of a small satellite based on the IDEF0 method.
3.3. Design catalogue
The given information for the small satellite design problem can be described by the simplified
design catalogue as shown in Table 1, where each sub-function has different DPs and a set of
local DOs.
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
Journal of Engineering Design
Figure 2.
9
Function structure of a small satellite.
In Table 1, each sub-function has two DPs except F6 having only one, such that 32 combinations
of DPs are possible; each combination can be a potential design concept alternative for a small
satellite. It is very important to note that the purpose of the filtering procedure is to select more
valuable (feasible) combinations from all possible combinations in order to accelerate the search
procedure of the best design concept. The main difficulty for the filtering procedure is that each
combination has different domains for the DOs while the design constraints remain the same. For
example, the domain of DO1,2 in the combination PL1, ADCS1, CDMS1, COM1, EPS1, and GS1
is {0.01, 0.05, 0.1} while {0.2, 0.3} in the combination PL2, ADCS1, CDMS1, COM1, EPS1,
and GS1.
Based on the design requirements and other design considerations (e.g. mission, budget, safety,
and functional/geometric constraints), the 12 design constraints in Table 2 are considered.
4.
CO2 DE
4.1. Process
As illustrated in Figure 3, the overall process of CO2 DE, being essentially coherent with that of a
systematic design approach in Figure 1: (1) product specification, (2) function structure definition
by decomposition, (3) DP search, (4) combination of compatible DPs by filtering, and (5) selection
of the best design concept, focusing on design constraint satisfaction and multiple criteria group
decision-making can be outlined as follows:
At the product specification and overall function decomposition phase, users (design teams)
must translate customer requirements to functional requirements and measurable design targets.
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
10
Figure 3.
D.Y. Kim and P. Xirouchakis
Process of CO2 DE.
Next, users, especially experts having knowledge on overall functionality define the set of subfunction and their functional structure (Figure 2) through an appropriate decomposition. Then,
users search the DPs for each sub-function. At this point, it is essential to identify local DOs for
each sub-function and to specify preferences on them. By matching inputs and outputs among subfunctions and transforming strict requirements (of customers and users’company) into constraints,
a set of global design constraints (Table 2) should be defined. Finally, users complete constructing
a design catalogue (Table 1). As mentioned in Section 3.1, the results of carrying out the above
design steps become the input information to CO2 DE.
At the compatible combinations filtering phase, CO2 DE extracts a set of compatible combinations of DPs (to be called k-design concepts hereafter, where ‘k’ is the user-defined number of
design concept alternatives) from all possible combinations, considering global design constraints.
Finally, at the selection phase of the best design concept, global decision-makers specify first
global criteria. More specifically, in order to evaluate the k-design concepts with respect to the
global criteria, it is needed to define how to evaluate, i.e. measure the level of performance for each
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
Journal of Engineering Design
11
global criterion and to define a preference function to map the level of performance to a preference
score. Once each global decision-maker evaluates and determines the levels of performances of
the k-design concepts with respect to all his global criteria, CO2 DE represents the preference
scores for global criteria and the aggregated global preferences over the global criteria and over
decision-makers. In the long run, global decision-makers are able to select the best design concept on the basis of the concept ranking given by CO2 DE. If there is no globally preferred design
concept among the k-design concepts, or else some decision-making conditions for the selection
process are dynamically changed in the course of the procedure (e.g. global constraints change
or design teams’ preference change), it is necessary to find different design concepts, which can
be achieved by an iterative procedure. Therefore, it can be said that the overall process of the
filtering and selection phase of conceptual design does not exclude any interaction and iteration
between the global decision-makers and local design teams for sub-functions, but instead, it just
helps them to find the best design concept with respect to: global design constraints and global
decision-makers’ preference scores.
4.2. Main modules of the system
Figure 3 summarises what the inputs and outputs of each module are, and what information should
be specified by design participants. Figure 4 illustrates the module architecture of CO2 DE.
Figure 4.
Module architecture of CO2 DE.
12
4.2.1.
D.Y. Kim and P. Xirouchakis
User interface for a design catalogue construction
CO2 DE utilises Microsoft Excel™ as a tool for an input data specification because it has been
widely used for efficient data handling from a practical point of view. Therefore, it can be said
that input data specifications and modifications such as ‘add;’ ‘delete;’ and ‘update’ is as easy
and efficient as when using Microsoft Excel™ . Once a design catalogue has been constructed and
imported into the CO2 DE system, users may want to explore visually the global design constraint
network to verify the relationships between sub-functions and admissible values of local DOs. In
this regard, CO2 DE provides a tree-structured constraint information and a graphical user interface
as shown in the workspace and the main windows in Figure 5, by which users can visualise the
overall relationship between sub-functions at a glance.
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
4.2.2. Compatible combination filtering module
As mentioned before, the filtering module helps users to extract k-design concepts from all possible
combinations of DPs considering the global design constraints. Note that the domains of some
design variables in Table 1 are continuous and the global design constraints in Table 2 are not only
binary, so it is difficult to apply conventional binary constraint satisfaction techniques to the small
satellite design problem. In this regard, first, any interval (continuous domain) will be discretised,
i.e. approximated considering the given increment value. For example, the domain [3 . . . 6] for the
DO1,1 of the DP ‘PL1’can be discretised to {3, 4, 5, 6} by the increment value ‘1’. The more refined
the discretisation (small increment value), the more the precision increases while, on the negative
side, the computational cost also increases. Secondly, it is necessary to develop a domain-specific
Figure 5. Three windows of CO2 DE.
Journal of Engineering Design
13
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
search method to avoid full enumeration. For example, the global deign constraints in Table 2 are
not so interrelated to each other, such that the overall problem can be decomposed into a set of
sub-problems: (1) sub-problem with the constraints C1 , C2 , C3 , and C4 (2) with the constraints
C5.1 , C5.2 , and C6 , (3) with the constraint C7 , and (4) with the constraints C8.1 , C8.2 , C8.3 , and
C8.4 . For the case of binary design constraints, the reader can refer to Kim et al. (2006) about how
to apply (binary) constraint satisfaction techniques to the filtering procedure.
CO2 DE provides all calculation results in the ‘output window’ as shown in Figure 5. At last,
CO2 DE gives a sorted list of combinations of DPs according to the number of feasible solutions,
so that according to the user-defined number k of design concept alternatives, k-design concepts
can be extracted from all possible combinations. For example, it can be said that the combination
PL1 × ADCS1 × CDMS2 × COM1 × EPS1 × GS1, having ‘331245158400’ feasible solutions,
is the most compatible combination in Figure 5.
4.2.3. Decision support module for the selection of the best design concept
Initially, the tree-structured window shown at the top-left corner of the multiple criteria group
decision-making (MCGDM) window in Figure 6 is intended to help users to explore information
about the global decision-makers having different sets of global criteria and weights easily. The
procedure of the decision support module of CO2 DE proceeds in the following sequence of
Figure 6.
Decision support module for the selection of the best design concept – MCGDM Window.
14
D.Y. Kim and P. Xirouchakis
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
numbering of Figure 6: [1] level of performance (X), [2] preference function, [3] k-design concept
alternative, [4] the possible value range or discrete choices for X of the selected design concept,
and [5] aggregation.
[1] Level of performance (X):
Users specify:
• How to evaluate, i.e. measure the level of performance for each global criterion, e.g. the level
of performance for the design criterion ‘energy consumption’ can be represented by the sum
of each subsystem’s energy consumption.
• user-acceptable value range† of X and, if necessary, target of X. Here, CO2 DE helps users
to recognise the range of possible values of X under the given domains of the global design
variables if X is specified by means of the global design variables.
[2] Preference function: Users specify a preference function to map the level of performance to a
preference score. Users can select one of the pre-defined type of preference function or specify
directly a user-defined preference function, i.e. users should select one of the following option
from the combo box in [2] of the MCGDM window in Figure 6, or if necessary, specify directly
a preference function in the edit box in [2] after selecting the ‘User Defined’ option from the
combo box: Linear(MAX), Linear (MIN), Linear(TARGET), Exponential(MAX), Exponential
(MIN), Exponential(TARGET), Logarithmic(MAX), Logarithmic(MIN), and User-Defined.
Users can visually verify the specified preference function through the graphical user interface
at the top-right corner in the MCGDM window.
[3] k-design concepts: The extracted k-design concepts from the filtering module are listed at
the bottom of MCGDM window. In Figure 6, ‘3’ has been specified for the value of ‘k’. By
modifying this value, users can evaluate more/less design concept alternatives.
[4] The possible value range or discrete choices for X (level of performance for one criterion)
of the selected design concept: Now each global decision-maker should evaluate k-design
concepts with respect to his global criteria, and specify the level of performance for each
global criterion of each design concept. CO2 DE helps global decision-makers to recognise the
range of admissible values of X for evaluating design concepts if X is specified by means of
the global design variables. Furthermore, it provides three different ways to specify values for
the level of performance of a global criterion according to the global criterion’s representation
type of the level of performance:
• continuous (e.g. mass, energy consumption)
• discrete (e.g. no. of ground stations)
• single: software generated value, i.e. number of feasible solutions
In Figure 6, the possible value range [19 . . . 30] for the level of performance of the design
criterion ’energy consumption’is mapped to the preference score ’4.37023’of the current design
concept, ’design concept 1’.
[5] Aggregation: Once all global decision-makers have finished all evaluations of k-design concepts, and thus they have represented their preference scores for the k-design concepts, CO2 DE
calculates the global preference scores (e.g. ‘40.41,’ ‘67.23,’ ‘41.04’ in the preference column at
the bottom of Figure 7) for the k-design concepts considering weights of global decision-makers
and global criteria (see top-left corner window in Figure 6).
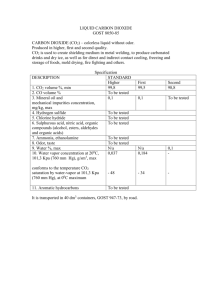
4.2.4. Design evaluation result exploring
Since it is not so easy to interpret the result of design evaluation, CO2 DE provides a spider chart,
which has been widely used as a visual multiple criteria decision support tool, in order to visualise
†
Users can delineate a range of admissible and encouraged values for the level of performance.
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
Journal of Engineering Design
Figure 7.
15
Design evaluation result.
the evaluation result of the global decision-makers as shown in Figure 7. Finally, according to
the global preference scores in Figure 7, it can be concluded that design concept 2 (combination
of PL1, ADCS1, CDMS2, COM1, EPS2, and GS1) is the best design concept having the global
preference score 67.23. The selected design concept will be detailed at the subsequent embodiment
and detailed design stages.
4.2.5.
Executive summary
It is necessary to generate an executive summary based on the design evaluation results containing
the detail information about the best design concept and the global decision-makers’ preferences.
CO2 DE saves this information to an Excel file as shown in Figure 8.
5.
Limitations and future research
Some limitation of CO2 DE suggest clear direction for future research. First of all, the current
version of CO2 DE can support only the last two steps of the conceptual design process: filtering
and selection as shown in Figure 1. Therefore, a further study of the early phase of conceptual
design concerning the generation of design concepts, as briefly reviewed in Section 2.1, should
be carried out focusing on (1) how to translate product requirements into technical attributes, (2)
functional decomposition methods, and (3) how to support the DP search and aid the designer’s
creative idea generation.
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
16
Figure 8.
D.Y. Kim and P. Xirouchakis
Executive summary example generated by CO2 DE.
The issues of how to describe the properties of each sub-function as design variables and
how to represent, even create the relationships between sub-function as design constraints are
prerequisites for the constraint-based approach to the filtering process. In particular, it is necessary
to deal with the imprecise and incomplete information of the conceptual design stage for constraint
modelling (Feng and Kusiak 1995, Lallouet and Legtchenko 2006) as modelled by different
domain options for each design variable in this paper. More fundamentally, in a collaborative
design environment, it can be questionable that all design participants are supposed to have the
same way of representing and manipulating DPs and design constraints. Nonetheless, it can be said
that the constraint-based design approach is one of the efficient ways of allowing multidisciplinary
design participants to share their heterogeneous design knowledge and resolve their conflicts
(e.g. Kleiner et al. 2003) and collaborative design starts with an effort to find a common way of
representing and manipulating the design problem.
One of the main difficulties in the development of CO2 DE is that many design constraints
are non-binary, non-linear and if-then-else rules, which are difficult to handle in general (SamHaround and Faltings 1996). Considering the difficulty of developing a general purpose non-binary
constraint solver, all design constraints in Table 2 have been embedded as source code in the current
version of CO2 DE. For that reason, if the design constraints are changed (add/update/delete), they
must be translated into source code for the new constraints and CO2 DE must be recompiled to
regenerate a new version. Nonetheless, from a practical point of view, this difficulty can be
diminished with a different interpretation, such as simplification of domains (e.g. ‘small’ or ‘big’
instead of detailed figures for size) and problem reduction by decomposing an overall problem
into a set of smaller problems as implemented in this paper.
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
Journal of Engineering Design
17
A weighted aggregation method adopted for the selection process of CO2 DE. In fact, the main
problem of such a method is how to aggregate the set of mono-criterion preferences to the global
preference considering commensurability (measurability by the same standard or scale of values)
and normalisation. In other words, the most important and difficult issue in MCDM and GDM is
the allocation of the scaling constants or weights fixing the relative power of each criterion and
each decision-maker in the group. Generally in the literature, it is assumed that these weights are
allocated directly by a facilitator or supra decision-maker, determined informally upon consensus
or agreement between decision-makers allowing interpersonal comparisons (Keeney and Raiffa
1976). However, the issue of how to systematically determine the weights should be studied
carefully considering the characteristics of engineering design. First, it is necessary to specify on
what grounds (e.g. certain quantitative values and their scales supported by engineering analyses
and past design knowledge) design participants represent their preferences. Secondly, it should be
kept in mind that the primary bases for the design participants to determine logically consistent
weight values by a transformation procedure (Allen 2001, Sen 2001, See and Lewis 2004) can be
experimental results of similar cases, past experience of a company, or other exclusive engineering
knowhow. The allocation of weights upon agreement or consensus through negotiation or in an
informal way seems to be difficult. To make the weights acceptable to all the design participants,
they should be determined through transparent procedures based on tangible criteria to reflect the
relevance of each design participant to the design concept selection problem.
6.
Conclusions
This paper has presented a framework of decision support systems for collaborative design. Since
effective multidisciplinary teamwork should be started from the conceptual design phase, we have
developed the system particularly for the design concept filtering and selection stages although
the proposed frameword can facilitate a design task, which is recurrent in many design phases.
First, design teams must define (by analysis, creative idea generation, search) function structure,
DPs, design variables, design constraints, a set of global decision-makers (selected participants
from the design teams), global design criteria, a set of performance evaluations of design concepts
for each criterion, and preference aggregation methods. Then, based on this given information,
the design system should extract compatible combinations of DPs from all possible combinations
considering design constraints (filtering). Finally, these filtered combinations of DPs become the
design concept alternatives from which the global decision-markers will select the best design
concept with respect to the global design criteria (selection). CO2 DE has been developed based
on the proposed framework to support the filtering and selection processes focusing on design
constraint satisfaction and multiple criteria group decision-making. CO2 DE is currently being
tested in the concurrent design facility at EPFL space centre (http://space.epfl.ch) to support a
small satellite design project by students.
By applying CO2 DE to the design process, it can be expected that there are the following
benefits:
• designers can integrate design verification (feasibility check under design constraints) and
design evaluation (optimality check against design criteria)
• each design team for a sub-function (e.g. satellite payload system design team or electrical
power system design team) can focus on their own design problem assuming that conflicts
between design teams will be identified by CO2 DE
• the overall design process can be speeded up by reducing design iterations
• a company can expect the structured conceptual design process (systematic reuse, consideration
of different points of view, no omission of possible solutions) and a consistent decision-making
during the whole design process.
18
D.Y. Kim and P. Xirouchakis
Acknowledgements
The authors wish to acknowledge the seed funding from the EPFL Space Center. Special thanks go to Dr. Maurice Borgeaud
and Ms. Noca Muriel for introducing to us the small satellite design case study. A part of this work was presented in
the proceedings of the 4th International Conference on Digital Enterprise Technology (Kim et al. 2007). This paper was
carefully revised and extended to introduce the developed system, CO2 DE.
Downloaded By: [University of Warwick] At: 18:18 11 August 2009
References
Allen, B., 2001. On the aggregation of preferences in engineering design. Proceedings of the ASME Design Engineering
Technical Conference and Compters and Informations in Engineering Conference, Pittsburgh, USA.
Altšuller, G.S., 1984. Creativity as an exact science: the theory of the solution of inventive problems. New York:
Gordon & Beach.
Bracewell, R. and Sharpe, J., 1996. Functional descriptions used in computer support for qualitative scheme generationSCHEMEBUILDER. Artificial Intelligence for Engineering Design, Analysis, and Manufacturing, 10, 333–345.
Darr, T. and Birmingham, W., 2000. Part-selection triptych: a representation problem properties and problem definition,
and problem-solving method. Artificial Intelligence for Engineering Design, Analysis, and Manufacturing, 14, 39–51.
Deng, Y.-M., Britton, G., and Tor, S., 2000. Constraint-based functional design verification for conceptual design.
Computer-Aided Design, 32, 889–899.
Ericsson, A. and Erixon, G., 1999. Controlling design variants: modular product platforms. Dearborn: Society of
Manufacturing Engineers.
Feng, C.-X. and Kusiak, A., 1995. Constraint-based design of parts. Computer-Aided Design, 27 (5), 343–352.
Finch, W. and Ward, A., 1997. A set-based system for eliminating infeasible designs in engineering problems dominated
by uncertainty. Proceedings of the 1997 ASME Design Engineering Technical Conferences, Sacramento, USA.
Harmer, J., Weaver, M., and Wallace, M., 1998. Design-LED component selection. Computer-Aided Design, 30, 391–405.
Keeney, R.L. and Raiffa, H., 1976. Decisions with multiple objectives: preferences and value tradeoffs. New York: John
Wiley & Sons.
Kim, D., Bufardi, A., and Xirouchakis, P., 2006. Compatibility measurement in collaborative conceptual design. CIRP
Annals, 55 (1), 151–154.
Kim, D., Bufardi, A., and Xirouchakis, P., 2007. An architecture for collaborative conceptual design support systems.
Proceedings of the 4th International Conference on Digital Enterprise Technology, Bath, UK.
Kleiner, S., Anderl, R., and Gräb, R., 2003. A collaborative design system for product data integration. Journal of
Engineering Design, 14 (4), 421–428.
Lallouet, A. and Legtchenko, A., 2006. Partially defined constraints in constraint-based design. Artificial Intelligence for
Engineering Design, Analysis and Manufacturing, 20, 297–311.
Michelena, N. and Papalambros, P., 1997. A hypergraph framework for optimal model-based decomposition of design
problem. Computational Optimization and Applications, 8, 173–196.
Mittal, S. and Falkenhainer, B., 1990. Dynamic constraint satisfaction problems. Proceedings of the 8th AAAI Conference,
Boston, USA, 25–32.
Nadel, B. and Lin, J., 1991. Automobile transmission design as a constraint satisfaction problem: modelling the kinematic
level. Artificial Intelligence for Engineering Design, Analysis and Manufacturing, 5, 137–171.
Noca, M. and Krpoun, R., 2006. SwissCube project specifications. EPFL Space Center, http://space.epfl.ch
Pahl, G, and Beitz, W., 1988. Engineering design – a systematic approach. London: Springer-Verlag.
Parunak, V., Ward, A., Fleisher, M., Sauter, J., and Chang, T.-C., 1997. Distributed component-centered design as agentbased distributed constraint optimization. AAAI ’97 Workshop on Constraints and Agents, Providence, Rhode Island,
USA.
Reddy, S., Fertig, K., and Smith, D., 1996. Constraint management methodology for conceptual design tradeoff studies.
Proceedings of the 1996 ASME Design Engineering Technical Conferences, Irvine, USA.
Sabin, D. and Freuder, E.C., 1996. Configuration as composite constraint satisfaction. Proceedings of the Artificial
Intelligence and Manufacturing Research Planning Workshop, Albuquerque, USA, 153–161.
Sam-Haround, D. and Faltings, B.V., 1996. Solving non-binary convex CSPs in continuous domains. Lecture Notes in
Computer Science, 1118, 410–424.
Sarafin, T.P., 1997. Spacecraft structures and mechanisms. Dordrecht: Kluwer Academic Publishers.
See, T.-K. and Lewis, K., 2004. A formal approach to handling conflicts in multi-attribute group decision making.
Proceedings of the ASME Design Technical Conferences, Salt Lake City, USA.
Sen, P., 2001. Communicating preferences in multiple-criteria decision making: the role of the designer. Journal of
Engineering Design, 12 (1), 15–24.
Snavely, G. and Papalambros, P., 1993, Abstraction as a configuration design methodology. Proceedings of the 19th ASME
Design Automation Conference, Albuquerque, USA.
Stone, R.B., McAdams, D.A., and Kayyalethekkel. V.J., 2004. A product architecture-based conceptual DFA technique.
Design studies, 25, 301–325.
Ullman, D., 1992. The mechanical design process. New York: McGraw-Hill.
Ulrich, K. and Eppinger, S., 2004. Product design and development. 3rd ed. New York: McGraw-Hill.