Get Rid of Unanimity: the Superiority Laurent Bouton Aniol Llorente-Saguer
advertisement

Get Rid of Unanimity: the Superiority
of Majority Rule with Veto Power
Laurent Bouton
Aniol Llorente-Saguer
Frédéric Malherbe
Georgetown University
Queen Mary,
London Business School
University of London
November 25, 2013
PRELIMINARY AND INCOMPLETE - DO NOT CIRCULATE
Abstract
We compare both theoretically and experimentally three di¤erent voting systems:
Unanimity, Majority, and majority with Veto power for every agent. Our theoretical model generalizes Feddersen and Pesendorfer (1998) to allow for biases in the
information structure and the coexistence of common and private value agents. First,
we prove the existence of an equilibrium under Veto and characterize it. Second, we
compare the welfare properties of the three voting systems using two benchmarks:
Interim Pareto Dominance and Full Information Pareto Dominance. We show that,
for su¢ ciently large committees, Veto dominates both Majority and Unanimity according to both criteria. We also …nd su¢ cient conditions for this result to hold in
small committees. In the laboratory, we …nd strong support for our theoretical results,
both in terms of agents’aggregate behavior and in terms of welfare comparison.
JEL Classi…cation: C92, D70
Keywords: Unanimity Rule, Veto Power, Information Aggregation, Experiments
We thank participants to the ESA 2012 meetings in Tucson and Koln, the NDAM 2013 conference,
and seminar participants at Boston University, London Business School, and the Max Planck Institute in
Bonn. We particularly thank David Austen-Smith, Jean-Pierre Benoit, Micael Castanheira, and David
Myatt. We would also like to thank Erica Gross, Lucas Meier and Nico Meier for their excellent assistance
at running the experiments. We gratefully acknowledge …nancial support from the London Business School
(RAMD8871).
1
Introduction
Consider a group of agents willing to reform the status quo if and only if this is Pareto
improving. What voting system should they use? One obvious candidate is the unanimity
rule (Unanimity), which has been claimed to be the incarnation of the Pareto criterion
(Wicksell 1967 [1896]; Buchanan and Tullock 1962). Unanimity does indeed deliver that
outcome in a world in which agents have private values. Unfortunately, this rule does
not always feature such a nice property. For instance, when agents have common values
(and imperfect information), Unanimity performs poorly, both in comparison with the
majority rule (Majority) and in absolute terms (Feddersen and Pesendorfer 1998). Given
that Majority performs poorly when agents have private values, the challenge is to …nd
a rule that would (weakly) outperform both Majority and Unanimity in both kinds of
situation.1 This is exactly what we achieve in this paper: we show that majority with
veto power (Veto) is more likely to implement the reform when it is Pareto improving
(and less likely when it is not) than both Majority and Unanimity.2
Under Veto, agents have three possible actions: yes, no, and veto. The reform is
adopted if (i) a majority of agents vote yes, and (ii) no agent uses her veto. In all other
cases, the status quo remains.3
There are two main reasons motivating our focus on the Pareto criterion. First, there
are many real-life situations in which this criterion is an underlying objective or requirement. This is arguably the case for most voting bodies granting veto power to their
members (e.g. by requiring unanimity). Often, the reason for granting veto power is that
potential members accept to join the voting body only if they are guaranteed that they
will not be made worse o¤. From an individual vantage point, veto power achieves just
1
This is an crucial requirement for a voting body presiding over di¤erent types of decisions. For
instance, the board of directors of a private company may have to vote on the allocation of bonuses to
its members (a private value issue), and also on bids in an oil…eld auction (a common value issue with
imperfect information). If the voting system used does not perform well in both situations, then the board
faces the risk of making suboptimal decisions.
2
An alternative would be for the voting body to change its voting system depending on the kind issue at
hand: Unanimity when information is perfect and agents have private values, Majority when information
is imperfect and agents have common values. The problem is that this requires the use of complementary
mechanism to decide which system to use. One might think that Veto is equivalent to using Unanimity to
decide whether to use Unanimity or Majority. However, our results make clear that this is not the case.
3
The decision rule under Veto is the same as under Majority and Unanimity. The di¤erent is that the
sets of possible actions under Majority (yes and no) and Unanimity (yes and Veto) are subset of the set of
possible actions under Veto.
2
that. For instance, in the case of the European Council, countries required veto power
before becoming members of the EU in order to ensure that they would not be imposed
a decision or a policy that would go against their best interest. This is similar for partnerships (e.g. in professional services …rms): veto power over important decisions is an
individual insurance for each partner that she could block any decision that would hurt
her interests. Ensuring participation is not the only reason to grant veto power. In the
case of the UN Security Council, it was believed that “the enforcement of many Security
Council resolutions would require the military and …nancial support of the superpowers”
(Winter 1996, p. 813). Therefore, no resolution should be passed without the support of
all permanent members; hence their veto power. In the case of Juries in the US, the veto
power given to all juror ensures that any juror could never be imposed a guilty sentence
s/he does not agree with. The oft-cited argument is that this minimizes the likelihood of
convicting an innocent.4
Second, when there is a market failure, one could imagine organizing a vote to correct
the failure. For instance, consider a good generating a positive consumption externality
whose magnitude is uncertain. The market allocation of this good is not Pareto e¢ cient:
the good is underconsumed. Having identi…ed the potential failure, both the agents consuming the good and those a¤ected by this externality may be willing to correct it, e.g.,
through voting. Consistency requires that the voting system performance should be assessed against the same criterion as the failure the vote is meant to correct. Therefore,
the voting system that is used must guarantee that the alternative allocation is adopted
if and only if it Pareto dominates the market allocation. Using another criterion would
call for the use of that other criterion to identify the initial market failure. Moreover, if
the alternative allocation may be adopted even if it is not Pareto improving, then some
agents would oppose the very idea of correcting the failure using that voting system.
We compare both theoretically and experimentally three di¤erent voting systems:
Veto, Unanimity, and Majority. Our theoretical model generalizes Feddersen and Pesendorfer (1998) to allow for (i) biases in the information structure, and (ii) the coexistence
4
Other examples in which veto power is awarded are the procedure of removal from state court in
the US, the debt restructuration procedure under the U.S. Trust Indenture Act of 1939. Also, in the
constitution Poland in the 17th and 18th centuries, there was an institution called the liberum veto. All
bills had to pass the Sejm or "Seimas" (Parliament) by unanimous consent (see Georges and Romme 2004
for other examples).
3
of common and private value agents. The common value agents, who all have the same
state-contingent preferences, are imperfectly informed: each of them privately observes a
signal about the quality of the reform. Conditionally on their signal, some believe that
the change is better than the status quo, others believe the opposite. The information
structure may be biased, i.e. one of the two possible signals (positive or negative) can
be less precise than the other. The private value agents can be of two di¤erent types:
some always prefer the status quo, and others always prefer the reform. Our setup nests
di¤erent situations of special interest in the literature: only common value agents, only
private value agents, and a mix of private and common value agents.
The theoretical results are as follows. First, we prove the existence of an equilibrium
under Veto and characterize it.5 Voters’behavior under Veto takes three di¤erent forms.
Unless the negative signal is much more precise than the positive one, voters’ behavior
under Veto is similar to their behavior under Majority (i.e. voters do not use their veto).
When the negative signal is so precise (relatively) that one negative signal is su¢ cient
information to conclude that the reform is bad, voters’behavior under Veto is the same
as under Unanimity (i.e. voters never vote no). Finally, for the case in-between, voters’
behavior involves the use of all possible actions (i.e. yes, no, and veto) with positive
probability. In that case, the behavior of voters under Veto is thus necessarily di¤erent
than under both Majority and Unanimity.
Second, we compare the welfare properties of the three voting systems using two benchmarks. The …rst one is the “Interim Pareto Dominance”proposed by Holmstrom and Myerson (1983). In short, a system Interim Pareto Dominates another if it makes all agents
weakly better o¤ from an interim standpoint (for all realized type pro…les). That is, the
expected utility of any agent conditional on her private information should be weakly
higher under the former than under the latter. The second benchmark is the “Full Information Pareto Dominance”, which resonates with the usual benchmark in the Condorcet
Jury Theorem literature. A voting system Full Information Pareto Dominates another if
it implements with higher probability the decision of a fully informed benevolent dictator
who applies the Pareto Criterion. The …rst benchmark is well-suited to compare the welfare performances of di¤erent systems. The second benchmark can be used to compare
5
We also show the existence of a unique equilibrium under Unanimity. How about M?
4
systems but it is particularly well-suited to evaluate the e¢ ciency of any given system.
Using these two benchmarks, we prove that Veto (weakly) outperforms both Majority
and Unanimity in four results that hold for all relative precision of the signals. First,
we show that both Veto and Unanimity Interim Pareto Dominates Status Quo (de…ned
as trivial benchmark voting system which never adopts the reform), but that Majority
does not. Second, when the group grows large, Veto Interim Pareto Dominates both
Majority and Unanimity. Third, Veto Full Information Pareto Dominates both Majority
and Veto. Finally, Veto is e¢ cient in the sense that it implements the Full Information
Pareto Decision with probability that tends to 1 when the group grows large.
To assess the validity of our theoretical …ndings, we ran a series of laboratory experiments. There are several reasons to run such experiments. First, they allow us to evaluate
the e¤ective performance of each system in a controlled environment. Second, one could
argue that Veto is more sophisticated than both Majority and Unanimity. Indeed, the
action set under Veto is richer than under Unanimity and Majority (3 vs. 2 actions).
Therefore, …nding the equilibrium strategy, which sometimes involves the use of mixed
strategies by all agents, might prove more complicated. If this is true, then Veto could underperform in comparison to our theoretical predictions, or, even worse, be outperformed
by Unanimity and/or Majority. The experiments allow us to test that hypothesis. Last
but not least, it allows us to test whether subjects play the “right” equilibrium. Indeed,
there exists another equilibrium under Veto. This equilibrium features exactly the same
properties as the unique equilibrium under Unanimity. One might thus worry that agents
do coordinate on this equilibrium when it is not the best possible outcome.
In the laboratory, we consider two settings in which there are only common value agents
(hence, the Pareto criterion is equivalent to information aggregation criterion used in the
Condorcet Jury Theorem literature).6 In the …rst setting (Setting 1 ), the information
structure is unbiased. According to the theory, Majority should perform very well in that
setting. In equilibrium, agents that receive a positive signal vote yes, and the ones that
receive a negative signal vote no. By doing so, they aggregate information perfectly, and
end-up taking the decision they would have taken if all signals were publicly observable.
In contrast, as shown by Feddersen and Pesendorfer (1998), Unanimity does a poor job
6
There are many other interesting possible combinations of oarameters values but it is beyond the
scope of this paper to analyze them all.
5
in aggregating information in that setting. In the second setting (Setting 2 ), the negative
signal is so precise (relatively) that one negative signal is su¢ cient information to conclude
that the reform is bad. In such a case, Unanimity aggregates information perfectly while
Majority does a poor job. Interestingly, this comparison should hold both across states
and in each state.
We …nd strong support for our theoretical results in the laboratory, both in terms of
agents’behavior and in terms of welfare comparison. Overall, Veto (weakly) dominates in
both settings. In Setting 1, Veto produces a signi…cantly higher welfare than Unanimity
while it produces no signi…cant di¤erences with Majority. In Setting 2, Veto produces a
signi…cantly higher welfare than Majority while it produces no signi…cant di¤erences with
Unanimity. When looking at welfare conditional on the state, most comparisons are in
line with the theoretical predictions. Yet, we do …nd some discrepancies in Setting 1. In
line with the …ndings of Guarnaschelli et al. (2000), we …nd that Unanimity does not
produce lower welfare in each state. Second, due to a small but strictly positive use of the
veto power under Veto, Veto and Majority di¤er slightly in their welfare properties across
states.
Our paper is related to four strands of the literature: …rst, the literature on the
link between the unanimity rule and the Pareto criterion (e.g. Wicksell 1896; Buchanan
and Tullock 1962; Guttman 1998; Chen and Ordeshook 1998; Sobel and Holcombe 1999;
Dougherty and Edward 2005). Second, the literature studying aggregation of information
in two-alternative decisions with strategic voters (for the theory part see e.g. Austen-Smith
and Banks 1996; Feddersen and Pesendorfer 1996, 1997, 1998; Myerson 1998; McLennan
1998; Chwe 1999; Van Weelden 2008; McMurray 2012; for the experimental part see e.g.
Guarnaschelli et al. 2000; Ali et al. 2008; Battaglini et al. 2008, 2012; Goeree and Yariv
2010; Bhattacharya et al. 2012). Third, the literature comparing electoral systems with
either two alternatives (e.g. Feddersen and Pesendorfer 1998; Guarnaschelli et al. 2000;
Coughlan 2001; Austen-Smith and Feddersen 2006) or multiple alternatives (e.g. Myerson
and Weber 1993; Myerson 2000, 2002; Bouton and Castanheira 2012; Bouton et al. 2012;
Bouton 2012). Four, the literature on veto power within institutions (see e.g. Groseclose
and McCarty 2001; Cameron 2000; Woods 2000; Blum 2005; Nunnari 2012).
6
2
The Model
A group of N
5 agents (with N odd) must choose between two possible alternatives, B
and R (or Blue and Red).7 R represents the status quo. There are two possible states of
nature: ! 2 f! B ; ! R g, which materialize with equal probability. While this probability
is common knowledge, the actual state of nature is not observable before the vote. The
group is split into two groups of …xed size: n (odd) common value agents and m (even)
private value agents (with n + m = N ).8 In each group, agents can be of two types: sB
and sR in the common value group, tB and tR in the private value group.
Common value agents have identical preferences represented by a utility function
us (W; !), that is a function of the state of nature and the alternative implemented:
us (B; ! B ) = us (R; ! R ) = 0;
us (B; ! R ) = us (R; ! B ) =
1:
(1)
That is, common value agents prefer alternative B in state ! B and alternative R (the
status quo) in state ! R .
The true state of the world is unknown, but each common value agent has private
information about it. They can be of two types: sB and sR . Type sR agents believe that
state ! R is more likely, while type sB believe that state ! B is more likely. In particular,
we assume (wlog) that the probability of being assigned type sR is relatively more likely
in state ! R than in state ! B ; and conversely for sB :
p(sR j! R ) > p(sR j! B ) > 0 and p(sB j! B ) > p(sB j! R ) > 0:
This does not rule out cases in which a given common-value type is more likely than the
other in both states; for instance: p(sB j! R ) > p(sR j! R ). Conditionally on the state, the
types of di¤erent common-value agents are independently drawn. We will often refer to
types sB and sR has signals.
Private value agents can be of two types as well (tB and tR ). Type tB agents always
prefer alternative B and tR -agents always prefer alternative R, irrespective of the state.
7
8
The wording in the model is as close as possible as the wording with use in the laboratory.
The oddness and eveness assumptions are useful to reduce the number of cases to discuss.
7
Their utility function ut (W; !) is the following:
utB (B; !) = 0;
utB (R; !) =
utR (R; !) = 0;
1;
utR (B; !) =
(2)
1:
The number of tB -agents is denoted by mB and the number of tR -agents by mR (with
mB + mR = m). The number of agents of each type is random: each of these private value
agents is randomly and independently assigned to type tB with probability
1
(and thus
is the probability that any private value agent is assigned type tR ).
In summary, there are four types of agents. We denote by zk 2 fsB ; sR :tB ; tR g the
generic type of an agent, and z = fzk gN
k=1 a realized type pro…le.
We consider group decisions under three voting systems: Unanimity (U ), Majority
(M ), and Veto (V ). Each agent has to choose an action, which can be interpreted as a
vote. The available actions depend on the voting system. A voting system
2 fU; M; V g ;
is de…ned by a set of possible actions A and a decision rule d that is mapping agents’
actions into a group decision: d
: fa 2 A gn ! fB; Rg. We denote by Xa the total
number of agents playing action a.
De…nition 1 Voting system "Veto" is de…ned by: V
AV
dV
fAV ; dV g, where:
= fb; r; vg
8
< B if Xv = 0 and X > Xr
b
=
: R
otherwise:
Equivalently, looking at the complement gives: the group decision is R if either Xv
1 or Xb
Xr . One can interpret the actions as follows. First, since a single v su¢ ces
to enforce group decision R, it can be interpreted as a veto exercised against decision
B: Second, r can be either interpreted as a vote for decision R, or against decision B:
Conversely, b can be either interpreted as a vote for decision B, or against decision R:
From now on, we call the actions “votes”, and we use the following terminology: action b
is a vote for B (or a b-vote), action r is a vote for R (or a r-vote), and action v is a veto
(against B).
Using the same decision rule (dV ), one can de…ne U , and M as special cases of V :
8
De…nition 2 Voting system "Unanimity" is de…ned by: U
AU
= fb; vg
dU
= dV ;
fAU ; dV g, where:
AV
with Xr necessarily equal to 0.
In this case, b can still be considered as a vote for B. However, the only actions that
weigh against B is v. It can either be interpreted as a vote for R where the unanimity is
required to implement B, or as a veto.
De…nition 3 Voting system "Majority" is de…ned by: M
AM
= fb; rg
dM
= dV ;
fAM ; dV g, where:
AV
with Xv necessarily equal to 0.
Here, b can be considered as a vote for B, and r as a vote for R. All votes have the
same weights, and no veto is possible.
Formally, we de…ne an agent strategy under voting system
fsB ; sR ; tB ; tR g ! 4 (A ) : In particular,
a (s)
as a function
denotes, under system
with which a common value agent of type s vote a. Similarly,
which a private value agent of type t vote a under system
a (t)
:
; the probability
is the probability with
.
An useful object to de…ne is the state-contingent probability that a common value agent
vote a for a given strategy pro…le. It corresponds to the expected fraction of common value
agents voting a in the corresponding state !:
!;
a
=
X
a
(s) p(sj!):
s2fsB ;sR g
Following Feddersen and Pesendorfer (1998), we focus on responsive symmetric Bayesian
Nash Equilibria in which agents do not play weakly dominated actions. A responsive pro…les is such that (at least some) common value agents change their votes as a function of
their type with positive probability. Formally, a pro…le is responsive if
9
(sB ) 6=
(sR ).
We do that to exclude symmetric Nash Equilibrium in which all common value agents
vote the same way independent of their type. For instance, if all vote v, then no agent
can in‡uence the group decision by deviating. Hence, this is an equilibrium. Ruling out
weakly dominated strategies does not eliminate this equilibrium.
At this stage it is worth pointing out that, under each voting system, private value
agents have a weakly dominant strategy. Under Veto, b weakly dominates both r and v
for tB agents; whereas v weakly dominates both r and b for tR agents. Under Unanimity,
b weakly dominates v for tB agents; whereas v weakly dominates b for tR agents. Under
Majority, b weakly dominates r for tB agents; whereas r weakly dominates b for tR agents.
Therefore, we have
3
b
(tB ) = 1; 8 ;
V
v
(tR ) =
U
v
(tR ) =
M
r
(tR ) = 1:
Veto
In this section we characterize an equilibrium under Veto. Given that the equilibrium
analyses for Unanimity and Majority are not fundamentally novel, we relegate them to
the Appendix A4.
Agents behavior depends on pivotal events: situation in which their vote changes the
…nal outcome towards a speci…c group decision. In other words, an agent is pivotal if the
group decision would be di¤erent without his vote. Whether a vote is pivotal therefore
depends on the decision rule and on all other agents’behavior. Agents’behavior, in turn,
depends on their strategies and on the signal they received. Thus, given a set of strategy
pro…les, it is possible to compute the probability of such an event occurring. For this, it
is useful to introduce a new piece of notation: xa denotes, from the perspective of a given
agent, the number of other agents playing action a:
In this section, we prove the existence of a responsive equilibrium under Veto and
characterize it. First, we need to de…ne the pivotal events, compute their probabilities
and then compute the expected payo¤ of the di¤erent actions (b, r, and v under Veto).
This is what we do in subsection 3.1. We will then be in position to identify the behavior
of agents in equilibrium (subsection 3.2).
10
In this section, we omit all superscript relative to the voting system since we are only
concerned with Veto.
3.1
Pivot Probabilities and Payo¤s
Under Veto, there are two pivotal events in each state of nature. First, a b-vote is pivotal
when, without that vote, nobody cast a v-vote, and B is lacking one vote to win (i.e.
! : Second, a v-vote is pivotal
xb = xr ). We denote that pivotal event in state ! by pivB
when the number of b-votes among other agents is strictly larger than the number of rvotes (i.e. xb > xr ) and nobody else casts a v-vote. We denote that pivotal event in state
! : Importantly, a r-ballot is never pivotal under Veto. Indeed, this would require
! by pivR
that, without that vote, B wins (i.e. xb > xr ), and, with that vote, R wins (Xb
Xr ), an
impossibility since n is odd. For the sake of readability, our notation does not re‡ect the
fact that the probability of pivotal events depend on the strategies through the expected
vote shares.
! ; we have
For pivB
!
B
!
Pr(pivB
) = Pr(xb = xr and xv = 0j!)
= Pr(mR = 0j!) Pr(xb = xr and xv = 0j!; mR = 0):
The second equality follows from
V
v
(tR ) = 1; i.e. tR agents always vote v under veto. We
(
!)
b
thus have
!
B
=
8
<
m
:
n 1
n 1 m
2
n 1 m
2
(
!)
r
n 1+m
2
0 if m > n
if 0
m
n
1;
if 0
m
n
1;
(3)
1:
! we have:
Similarly, for pivR
!
R
Note that when
=
!
r
8
>
>
<
>
>
:
m
nP1
j= n+12 m
= 0; then
!
B
n 1
j
m
(
(1
= 0 and
! )j
b
(
! )n 1 j
r
(4)
! )n 1
v
if m > n
!
R
! )n 1
b
=(
m
1:
8m:
Using these pivot probabilities in the two states of nature, we can compute the expected
11
payo¤ of the di¤erent actions for a common value agent of type s: To do this, it is useful
to de…ne the posteriors of common value agents’posteriors (that is after having observed
their type) over the state of nature are:
Pr(! B js) =
Pr(! R js) =
p(sj! B )
; and
p(sj! B ) + p(sj! R )
p(sj! R )
:
p(sj! R ) + p(sj! B )
Therefore, from (1) ; we have that the expected payo¤ of a b-vote for a common value
agent of type s is
!B
B
G(bjs) = Pr (! B js)
Pr (! R js)
!R
B ;
(5)
the expected payo¤ of a v-vote for a common value agent of type s is
!R
R
G(vjs) = Pr (! R js)
Pr (! B js)
!B
R ;
(6)
and the expected payo¤ of a r-vote for a common value agent of type s is
G(rjs) = 0:
(7)
Interestingly, we can see that common value agents behave as if the number of tR
agents is equal to 0 (i.e. mR = 0). The expected distribution of preferences in the group
of private value agents is thus irrelevant for the voting behavior of common value agents.
In other words, the choice of an action is not a¤ected by
; even when m > 0: Indeed,
when m > 0, all pivot probabilities are multiplied by the same factor:
m
> 0: The relative
expected payo¤ of each action thus remains una¤ected.
3.2
Voting Behavior
To organize the discussion of the equilibrium behavior of common value agents under Veto,
it is useful to partition the parameter space. This is because equilibrium strategies are
non-trivially a¤ected by the relative precision of the signals. Denoting the precision of a
signal sR by
any m; n, and
R
B)
p(sR j! R )
p(sR j! B )
and that of signal sB by
four thresholds
1;
2;
3;
12
4
for
R;
B
p(sB j! B )
p(sB j! R ) ,
we can de…ne (for
at which the set of actions played
with strictly positive probability at equilibrium change. In this section, we de…ne these
threshold.9 In Appendix A1, we prove that, for m
The four thresholds
1;
=(
B)
1
3
3;
n 1 m
n+1+m
j= n+12 m
with
= , if
3 (1
=
B)
B (1
2
n 1
j
=(
3)
n+1 m
n 1+m
,
4
3
1)j
(n j 1)(1
)j (
3
1)j ( (
<
1
2
3
4
< 1.
(
3
n 1
,
B)
=(
(
1)+
B
B
1)
and
n 1 j
;
n+1 m
n 1+m (1
B)
n+1 m
n 1+m
(1
B
(
B)
)j (
(
1; 1 <
are:
)(1
j= n+12 m
nP1
4
;
nP1
n 1
B
=
2;
n
B)
3)
3
1)+
2 [0; 1] and
1))n
3( B
1 j
= 0 otherwise.
We are now in position to state our …rst result about the behavior of common value
agents:
Proposition 1 When m
n
1, for each
R,
B,
m, n, there exist unique
,
,
,
all 2 [0; 1] such that the following strategy pro…le is a responsive symmetric equilibrium
under Veto:
b (sB )
=1
b (sR )
where the value of
R
,
<
1
;
=
,
;
,
R
r
r
(sB ) =
+
;
(sR ) = 1
b (sR )
;
v
2(
3;
= 0;
(sR ) =
;
satisfy:
2[
1;
2]
R
2(
2;
3]
R
4)
R
4
(0; 1)
0
0
0
0
0
0
(0; 1)
0
0
0
0
0
0
0
0
(0; 1
)
(0; 1)
0
1
Proof. See Appendix A1.
9
r (sR ) = 1:
b (sB ) = 1 and
1 corresponds to G(bjsR ) = 0 when
when b (sB ) = 1 and r (sR ) = 1: 3 corresponds to G(vjsR ) = 0 when
4 corresponds to G(bjsB ) = 0 when b (sB ) = 1 and v (sR ) = 1:
13
2
r
corresponds to G(bjsB ) = 0
(sB ) = ; and r (sR ) = 1:
It is easier to explain the intuition of the di¤erent cases for m = 0; and then explain
how increasing m changes the behavior of common value agent.
For
R
3;
the behavior of common value agents under Veto is the same as under
Majority (see Feddersen and Pesendorfer 1998). When m = 0; the two signals must have a
similar precision for
R
2[
1;
2 ].
The equilibrium is then such that
b (sB )
=1=
r
(sR ):
common-value agents vote their signal and do not use veto. The intuition is the following.
A b-ballot is pivotal if B and R receive the same number of votes in the group of other
agents. Given the strategy under consideration, this requires that in the group of other
agents, there are
n 1
2
signals sB and
n 1
2
signals sR . Adding one owns signal to this count,
means a lead of one signal in favor of one of the two states. The condition
R
2[
1;
2]
ensures that, in such a case, the posterior beliefs of the agent under consideration are in
line with his signal. In other words, conditional on being pivotal B, sB -agents believe
that B is best and sR -agents believe that R is best. The implication in terms of voting
behavior is obvious for sB -agents: they vote for b. For sR -agents, the situation is slightly
more complicated since there are two options to vote against b: voting either r or v. A
r-ballot has a value of zero, whereas a v-ballot has a negative value. This is so because a
v-ballot changes the outcome when there are more b votes than r votes. Given the strategy
under consideration, this is much more likely to happen in state ! B than in state ! R :
For
R
1
and
R
2(
2;
3] ;
the di¤erence in signal precision is small. This small
bias leads agents of one type to vote against their signal with positive probability. For
instance, when the sR signal is relatively less precise (i.e.
R
1 );
sR -agents prefer to
overlook their signal and vote b with positive probability. The reason is that, because
their signal is imprecise, the probability of making a mistake in state ! B is too high. This
is exactly the same behavior as under Majority. Yet, since agents have the possibility to
vote v under Veto, this requires that agents are not willing to use that option. This is the
role of condition
R
3:
ensuring that sR agents do not want to cast a v-ballot for the
strategy under consideration. Indeed, for an agent sR ; the value of voting v depends (1)
positively on the precision of the sR signal, and (2) negatively on the relative probability
of being pivotal R in states ! B and ! R : Therefore,
3
requires that, for a given precision
of the sR signal, the expected lead of B in state ! B is large enough and/or the lead of R
in state ! R small enough.
14
For
R
2(
3;
4 ];
the situation resembles the situation for
R
2(
2;
3] :
The di¤erent
is that sR -agents want to use their veto power with positive probability. As just explained,
this is so because, for the strategy pro…le when
R
2(
2;
3 ],
the expected lead of B in
state ! B is too large in comparison to the expected lead of R in state ! R . In equilibrium,
(1) sB agents mix between b and r; but they vote b with higher probability than for
R
=
3,
and (2) sR agents mix between r and v. There are two reasons why this is an
equilibrium. First, the positive probability of a veto by sR agents makes a vote b more
appealing (i.e.
!B
!R
B = B
goes up since there are more sR agents in state ! R ). Second, the
relatively higher vote shares of B in state ! B makes a v vote less appealing (i.e.
up and
For
!R
R
R
!B
R
goes
goes down).
>
4,
common value agents behave as they would under Unanimity. The sR
signal is so precise (relatively) that one sR signal is su¢ cient information to conclude
that R is better than B (even if all other signals are sB signals). Therefore, sR agents
prefer to cast a v-ballot. For sB agents, the situation is di¤erent. Given the strategy
under consideration, conditional on being pivotal, all other agents must have received a
sB signals. Obviously, if there are only sB signals, any agent must believe that state ! B
is more likely than state ! R : She thus prefers to cast a b-ballot.
It remains to explain what happens when m > 0: Given that common value agents
condition their behavior on the number of tR agents being equal to zero (otherwise R is
selected and they are never pivotal), they behave as if all private value agents are of type
tB : This inference induces common value voters to balance tB voters out by voting more
against b (and thus more for r and v). In particular, an increase in the number of private
value agents (keeping N …xed) induces a decrease of
1;
2;
3:
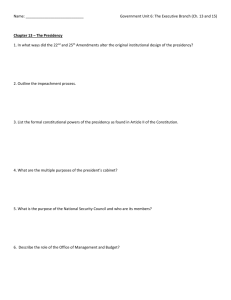
the set of values of
R
such
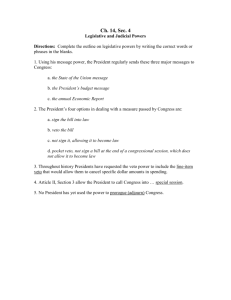
that sR agents vote against b increases. This change is illustrated in the following …gure
representing the partition of the parameter space identi…ed in Proposition 1 for n = 7,
m = 0 (left part of Figure 1) and n = 5, m = 2 (right part of Figure 1). We can see that
an increase in m induces a clockwise rotation of the curves
1;
2;
and
3.
Note that
4
also rotates clockwise but this is due to the decrease of n from 7 to 5; not to the increase
in m.
The following Proposition shows that, when m > n
agents under Veto is the same as under Unanimity:
15
1; the behavior of common value
b,v
br,rv
br,r
b,v
br,rv
b,r
br,r
b,br
b,r
b,br
Figure 1: Partition of the parameter space for n = 7, m = 0 (left part), and n = 5, m = 2
(right part). The letters in the center of each area correspond to the strategies played
by sB -agents and sR -agents, respectively. For instance, in the region between 2 and 3;
(br; r) means that sB -agents mix between b and r and that sR -agents play r:
Proposition 2 When m > n
1, for each
R,
B,
m, n, there exist a unique ' 2 [0; 1]
such that the following strategy pro…le is a responsive symmetric equilibrium under Veto:
(i) if
R
2 (1;
4 ),
then
b (sB )
r
= 1;
(sR ) = ' , and
v
(sR ) = 1
' ,
with ' 2 (0; 1) :
(ii) if
R
4,
then
b (sB )
= 1, and
v
(sR ) = 1:
Proof. See Appendix A1.
Given that common value voters condition their behavior on all private voters being
tB private, when m > n
1; there are always more b votes than r votes. Therefore, a b
vote is never pivotal, and the only way agents can change the group decision is by using
their veto power. This is exactly the same situation as under Unanimity.10 The intuition
for the voting behavior is thus the same as the one explained in Feddersen and Pesendorfer
(1998), and in Appendix A4.
In Appendix A2, we show the existence of another equilibrium under Veto. In this
10
Given m > n 1; the fact that sR agents vote r with positive probability is irrelevant for the group
decision: B is selected except if there is one or more v votes.
16
equilibrium, agents behave exactly as they would under Unanimity. It is easy but tedious
to show that there are no other equilibria under Veto.
4
Welfare Analysis
In this section, we compare the welfare properties of three voting systems from two perspectives. The …rst one is the “Interim Pareto Dominance” proposed by Holmstrom and
Myerson (1983). The second is the “Full Information Pareto Dominance”, which resonates
with the usual benchmark in the Condorcet Jury Theorem literature. The …rst benchmark is well-suited to compare the welfare performances of di¤erent systems. The second
benchmark can be used to compare systems but it is particularly well-suited to evaluate
the e¢ ciency of any given system.
4.1
Interim Pareto Dominance
An interesting benchmark for assessing the performance of a voting systems is the concept
of Interim Pareto Dominance (Holmstrom and Myerson (1983)). In short, a system dominate another if it makes all agents weakly better o¤ from an interim point of view. That is
all agent expected utility conditional on their private information should be weakly higher
under a system than under the system it is compared too.
In this subsection, we …rst assess, in terms of Interim Pareto Dominance, whether Veto,
Majority, and Unanimity are suitable voting systems to implement the Pareto Criterion.
To do so, we assess them individually against a benchmark Status Quo (SQ) voting system:
SQ
fASQ ; DSQ g, where DSQ (ASQ ) = R, for all ASQ . Then, we directly compare Veto
with Unanimity.
To assess the welfare properties of the voting systems, let us de…ne
D( ;
;
; z) : f ;
;
; zg ! 4 (fB; Rg) ;
the group decision mapping implied by voting system
strategy pro…le
;
, for the associated equilibrium
when the realized type pro…le is z. The ex-post utility of an agent
zk is uzk (D; !). This utility, when evaluated under voting system
17
, for the equilibrium
behavior
;
, the realized type pro…le z, and state !, corresponds to:
;
uzk (D( ;
; z); !):
Let us take expectation (conditional on zk ) with respect to ! and z, and denote the
corresponding expected utility of agent zk as:
Uzk ( ;
;
; z)
De…nition 4 A voting system
exists an equilibrium
0;
;
under
Ez;! uzk (D( ;
;
; z); !)jzk :
Interim Pareto Dominates (IP Dominates)
such that: Uzk ( ;
;
; z)
Uzk ( 0 ;
0;
0
i¤ there
; z), for all
; zk ; and with strict inequality for some zk .
This means that, if the voting system was to be chosen at that stage, all agents
would agree to use system
instead of system
0.
Our …rst result about Interim Pareto
Dominance is stated in the following theorem:
Theorem 1 Both Veto and Unanimity IP Dominate Status Quo. Majority does not IP
dominate Status Quo.
Proof. See Appendix A3.
The intuition for the Theorem is simple. For a voting system to IP Dominate the
Status Quo, all agents should be weakly better o¤ at the interim stage. The Status Quo
stipulates that R is always chosen. If some agents are of type tR ; they are strictly worse
o¤ if there is a strictly positive probability that B is selected. Under voting systems V
and U , any tR agent can prevent this from happening (by voting v). The second part of
the theorem follows from the fact that tR agents do not have this veto power under M:
Agents tB , to the contrary, cannot be worse o¤ than under Status Quo. Since there is a
strictly positive probability that B is chosen under V or U , they are in fact strictly better
o¤ under either of these systems than under Status Quo. Finally, common value agents
are also better o¤ under these two systems than under the Status Quo. One way to see
this is simply to realize that, under these two systems, they can individually enforce the
same outcome as Status Quo (again, by voting v). A basic revealed preferences argument
follows: since they decide not too, it must be in their best interest.
18
Now, let us compare directly the two voting systems that have passed the …rst test.
The question is whether Veto IP Dominates Unanimity. First, let us consider agents tR .
As explained above, they individually enforce their preferred decision (R) under either
system by voting v. They are hence indi¤erent.
Second, let us consider common value agents sB and sR . Consider the possible realizations for z such that mR > 0 (i.e. there is at least 1 agent tR ). In all these cases, the group
decision will be R under either systems, and common value agents are therefore indi¤erent.
Now, consider mR = 0. The key is to realize that m = 0 is a necessary condition for these
agents to be pivotal. Therefore, they behave as if this condition were satis…ed. In fact,
this subgame (corresponding to mB = m) can be rewritten as a game of pure common
value (with m votes for b to start with and n common value agents players). But we
know from McLennan (1998) that if a set of strategy pro…le maximizes the utility of the
agents in a pure common value game, this strategy pro…le should be an equilibrium. Since
the set of admissible strategy pro…les under Veto strictly includes the set of admissible
strategy pro…les under Unanimity (because AU
AV ), there cannot exist an equilibrium
under Unanimity that yields a strictly higher level of utility for these agents than all the
equilibria under Veto.
Third, the private value agents tB . For them also, only the subgame mR = 0 is relevant.
Since they always prefer the reform (B), whether they are better o¤ under V or U hinges
on B being more likely to be chosen under the former than under the latter. Formally:
Ez;! [Pr(D(V;
V;
; z) = B)jtB ] > Ez;! [Pr(D(U;
U;
; z) = B)jtB ]:
(8)
This condition is not always satis…ed,11 but we can show that it is satis…ed for N
su¢ ciently large:
1
Theorem 2 Let fni g1
i=1 and fmi gi=1 be two weakly increasing sequences -where ni rep-
resents the number of common value voters and the number of partisan voters-, with
Ni = ni + mi . When lim Ni = 1, Veto Interim Pareto Dominates Unanimity.
i !1
Proof. See Appendix A3.
Some observations are in order here. First, when N is su¢ ciently large, we have a very
11
A counter example is given by: n = 5, m = 2, p (sB j! B ) = 0:3 and p (sR j! R ) = 0:9.
19
powerful result. Indeed, that Veto IP dominates Unanimity means that all agents would
(even after learning their private information) weakly prefer to get rid of Unanimity and
use the Veto voting system instead. In that sense, and if the condition is satis…ed in the
parameter region that is relevant to a speci…c real life situation, this results means that
Unanimity is not a “durable” system (in the spirit of Holmstrom and Myerson 1983).
Second, when condition (8) is not satis…ed, Veto does not IP Dominate Unanimity.
There are two ways to interpret this result. From a positive point of view, this means that
some agents would object to replacing Unanimity with Veto (Unanimity is then durable).
From a normative point of view, however, it does not mean that adopting Veto is not
desirable. Indeed, we are concerned with a situation where a reform should be adopted
if it constitutes a Pareto improvement over the status quo. What we argue is that in
this context the Pareto Criterion on the allocation (whether the reform makes everyone
weakly better o¤) should prevail upon the Pareto Criterion on the voting system (whether
everyone weakly prefers a systems than another).
As an illustration, consider a voting system
that generates errors of type 2 (the
reform is adopted although it makes some agents strictly worse o¤) and no error of type
1. A voting system
to system
0
that does not generate any error at all, would be socially preferable
:12 Now, imagine that some agents always prefer the reform (as our tB agents
do). From their point of view, the system
is better than
0.
In fact, these agents are
the one that bene…t from the errors of type 2. They will therefore be worse o¤ if these
errors disappear. This is essentially what happens in our model when condition (8) is not
satis…ed. Agents tB "like" errors of type 2 and dislike errors of type 1. Imagine that going
from Unanimity to Veto decreases the errors of type 2 by more than those of type 1. Then,
tB agents will be worse o¤, even though the Pareto Criterion is implemented more often.
The next section considers a welfare benchmark that is better-suited to take this problem into account.
4.2
Full Information Pareto Dominance
Imagine all information (that is the realized type pro…le and the state of the world)
would be known to a benevolent dictator whose goal is to implement the Pareto Criterion.
12
By socially preferable, we mean that any Social Welfare Function in line with the objective of our
group, i.e. implementing the reform when it is a Pareto improvement, would rank 0 above :
20
That is, to implement the reform (select alternative B) if and only if it is not against
anyone’s best interest and it makes at least one agent strictly better o¤. In the spirit of
Feddersen and Pesendorfer (1997), we call the relevant condition for such a decision the
Full Information Pareto Criterion (FIP Criterion). Formally, we de…ne the FIP Criterion
Decision as follows:
DF IP C (z; !) =
8
>
<B; if mR = 0, and ! = ! B
>
:R;
otherwise
Its logic is straightforward. First, as soon as mR > 0, there is at least one tR agent, which
would be strictly worse o¤ under B. Then, if mR = 0, the relevant question is whether
the reform is in the best interest of common value agents. This is the case when the state
is ! B . Note that decision B is always in the best interest of agents tB .
What we do in this section is to compare the three voting systems using this benchmark
decision. To do so, let us de…ne
D( ;
;
; z) : f ;
;
; zg ! 4 (fB; Rg) ;
the group decision mapping implied by voting system
strategy pro…le
;
; for the associated equilibrium
and the realized type pro…le is z. Ex-post (that is, given z and !),
the (full information) e¢ ciency of voting system
( ;
;
; z; !)
Pr(D( ;
can be measured as follows:
;
; z) = DF IP C (z; !));
which is the probability of implementing the FIP Criterion. Given that the equilibrium
can be in mixed strategies, this probability can take values di¤erent than 0 and 1; i.e.
Pr(D( ;
;
; z) = DF IP C (z; !)) 2 [0; 1]:
We are now in position to de…ne the concept of Full Information Pareto Dominance:
De…nition 5 Given
B;
R ; n;
and m; a voting system
inates (FIP Dominates) another voting system
h
such that Ez;! ( ; ; ; z; !) > Ez;! ( 0 ;
0
0;
if there exists an equilibrium under
i
0;
; z; !) for all
.
Our …rst result is stated in the following theorem:
21
Full Information Pareto Dom-
Theorem 3 For all
For some
B;
R ; n;
B;
R ; n;
and m, Veto FIP Dominates both Majority and Unanimity.
and m; Veto strictly FIP Dominates both Majority and Unanimity.
Proof. See Appendix A2.
To understand the …rst part of Theorem 3, …rst notice that Veto implements the FIP
Criterion with probability 1 when there is one or more tR -agents in the group (mR > 0). In
that case, the FIP Criterion alternative, R, is chosen since tR -agents always cast a v vote.
The same is true under Unanimity but not under Majority. When there is no tR -agents
in the group (mR = 0), the FIP Criterion coincides with the objective of common value
agents: selecting R in state ! R and B in state ! B . To understand why Veto performs better
than Unanimity and Majority in that case, …rst notice that any strategy pro…le in Majority
or Unanimity can be reproduced under Veto. Second, recall from McLennan (1998) that,
in a pure common-value environment, a strategy pro…le producing the maximal ex-ante
utility must be an equilibrium. Third, notice that, given that private value agents always
behave in the same way, common value agents are actually playing a pure common-value
game. Finally, given that common value agents behave as if mR = 0 (even though the
number of tR -agents is uncertain at the time of the votes), we have that the strategy pro…le
that maximize the probability of selecting R in state ! R and B in state ! B when mR = 0
must be an equilibrium under Veto. This shows that there must exist an equilibrium in
Veto that implements the FIP Criterion with a probability at least as high as the best
equilibrium under either Majority or Unanimity.
The second part of Theorem 3 has to be discussed in two parts. For the comparison of
Veto and Unanimity, …rst notice that the crux of the matter is for mR = 0. Indeed, both
Veto and Unanimity implement the FIP Criterion with probability 1 when there is one
or more tR -agents in the group (mR > 0). As mentioned above, when mR = 0, the FIP
Criterion coincides with the objective of common value agents to aggregate information:
selecting B in state ! B and R in state ! R : Yet, we know from Feddersen and Pesendorfer
(1998) that Unanimity performs very poorly in terms of information aggregation. By
contrast, Veto features similar properties as Majority in that respect.
For the comparison of Veto and Majority, notice that the only strategy pro…le under
Majority that ensures that R is implemented when mR > 0 is such that all agents vote
for r with probability 1. Such a strategy pro…le would perform very poorly with respect
22
to information aggregation when mR = 0: Considering that common value agents behave
as if mR = 0 under Veto but not Majority, there must be values of the parameters such
that Veto performs strictly better than Majority.
The following theorem shows that Veto implements the FIP Criterion with a probability that tends to 1 when the group grows large:
1
Theorem 4 Let fni g1
i=1 and fmi gi=1 be two weakly increasing sequences, where ni repre-
sents the number of common value agents and mi the number of private value agents, with
Ni = ni +mi . When lim Ni = 1, there exists an equilibrium under Veto that implements
i !1
the FIP Criterion with a probability that converges to 1.
Proof. See Appendix A2.
The intuition behind Theorem 4 is the following. As we saw with Theorem 3, Veto
warrants to tR -agents the right to select R unilaterally. Therefore the FIP Criterion is
implemented with probability 1 whenever mR > 0. The interesting part of Theorem 4
is when mR = 0 occurs with strictly positive probability. That happens only when the
number of private value agents is bounded above. In that case, given that the number
of common value agents grows arbitrarily large, we have from Proposition 1 that agents
never vote v. Since common value agents condition their vote on mR = 0; they end up
maximizing the probability of selecting R in ! R and B in ! B ; i.e. the FIP Criterion, for
the case in which mR = 0:
Do Unanimity and/or Majority share the same feature? The answer is negative. Whenever the number of private value agents is bounded above, there exist parameter values for
which Unanimity implements the FIP Criterion with a probability strictly lower than 1
(see Feddersen and Pesendorfer (1998), for a proof that holds when
R
=
B
and m = 0).
The problem is di¤erent for Majority. That system performs well when there are no
tR -agents. Yet, since tR -agents do not have veto power, Majority implements the FIP
Criterion with probability strictly lower than 1 when the number of tR -agents is positive.
5
Experimental Design and Procedures
To test our theoretical predictions we ran controlled laboratory experiments. Experiments
were conducted at the BonnEconLab of the University of Bonn between June 2012 and
23
September 2012. We ran a total of 36 sessions with 18 subjects each. No subject participated in more than one session. Students were recruited through the online recruitment
system ORSEE (Greiner, 2004) and the experiment was programmed and conducted with
the software z-Tree (Fischbacher, 2007).
Subjects were introduced to a game that has the very same structure as the one
presented in Section 2. We only considered cases with common value agents, that is,
m = 0 in all our treatments. Following the experimental literature on the Condorcet jury
theorem initiated by Guarnaschelli et al. (2000), we did not refer to states of the world
or signals, but we referred to jars and balls respectively. There were two jars, the blue
jar and the red jar. Each jar contained a total of 100 balls, some of them blue and the
others red. The proportion of balls in each jar varied across treatments and will be de…ned
below. One of the jars was selected randomly by the computer, with equal probability.
The subjects were not told which jar had been selected, but they received a ball randomly
drawn from the selected jar. After seeing their ball, each subject could vote under the
rules of one of the voting systems.
The subjects’ payo¤ depended both on the color of the selected jar and that of the
decision taken by the group. If the group decision matched the color of the jar, the payo¤
of all members of the group was 100 talers. If the group decision is blue and the jar red
or the other way around, the payo¤ of all members was equal to 10 talers.
We considered two treatment variables, which lead to six di¤erent treatments. The
…rst variable was the voting system. We consider the three voting systems described in
Section 2: Unanimity (U), Majority (M) and Veto (V). In U treatments, subjects could
vote for either Blue or Red. Blue was implemented only if it was unanimous, i.e. Blue
became the group decision if and only if all subjects voted for Blue. In M treatments
subjects could also vote for either Blue or Red, but the group decision was the color with
most votes. In V treatments, on top of voting for Blue or Red, subjects could also veto
blue. If a subject in the group vetoed Blue, then the group decision was Red. If nobody
vetoed Blue, then the alternative with the most votes became the group decision.
The second variable was the information structure, described uniquely by the likelihood
of getting the right signal in either state. In Setting 1, signal precision was identical across
states: Pr (blue balljblue jar) = Pr (red balljred jar) = 0:7. This probabilities implied
24
Treatment
Voting
System
Setting
Blue Balls
in Blue Jar
Red Balls
in Red Jar
U
Unanimity
1
70%
70%
M
Majority
1
70%
70%
V
Veto
1
70%
70%
U2
Unanimity
2
99%
30%
M2
Majority
2
99%
30%
V2
Veto
2
99%
30%
Precision
(
B;
R)
7 7
3;3
7 7
3;3
7 7
3;3
99
70 ; 30
99
70 ; 30
99
70 ; 30
Table 1: Treatment overview.
equal precision in both states:
B=
R
= 37 . In Setting 2 instead, the red signal was more
precise: Pr (blue balljblue jar) = 0:99 and Pr (red balljred jar) = 0:3 and the precision
of the blue and red signals were
99
B = 70
and
R
= 30 respectively. Table 1 provides an
overview of the di¤erent treatments.
In Setting 1, Majority appears to the optimal "threshold decision rule" (Austen-Smith
and Banks 1996), and therefore maximizes the probability of implementing the Full Information Pareto Criterion. Setting 1 corresponds to case (ii) in Proposition 1. In that
case, Veto should mimic majority and both rules should strictly dominate Unanimity. In
Setting 2, the optimal "threshold decision rule" is Unanimity instead. This corresponds
to case (v) in Proposition 1. In that case, Veto should mimic Unanimity and both rules
should strictly dominate Majority.
We ran six sessions for each treatment. All experimental sessions were organized along
the same procedure: subjects received detailed written instructions, which an instructor
read aloud (see Appendix A7). Before starting the experiment, students were asked to
answer a questionnaire to check their full understanding of the experimental design. Right
after that, subjects played one of the treatments described for 50 periods, with groups
being rematched after each period.13 At the end of each round, each subject received the
following information: (i) the selected jar, (ii) the group decision, (iii) the number of votes
for each alternative, and (iv) their payo¤ for that period. To determine payments at the
end of the experiment, the computer randomly selected …ve periods and the total amount
13
In the setup of the Condorcet Jury Theorem, Ali et al (2008) …nds no signi…cant di¤erence between
random matching (which they call ad hoc committees) and …xed matching (which they call standing committees).
25
of talers earned in these periods was converted to euros with a conversion rate of 0.025.
In total, subjects earned an average of 13.15 Euros, including a show-up fee of 3 Euros.
Each experimental session lasted approximately 45 minutes.
6
Experimental Results
We present our experimental results in two distinct sections. Section 6.1 describes the
aggregate behavior. Section 6.2 summarizes the main …ndings with respect to outcomes
and welfare.
6.1
Aggregate Behavior
6.1.1
Setting 1
Table 2 summarizes aggregate behavior over all periods under all the rules in Setting 1,
together with theoretical predictions.
Unanimity
Majority
Veto
Ball
Blue
Red
Blue
Red
Blue
Red
Blue
91.42
48.52
95.60
4.64
96.44
3.19
Realized
Red
4.40
95.36
3.10
94.48
Veto
8.58
51.48
0.45
2.32
Prediction
Blue Red Veto
100
0
77
23
100
0
0
100
100
0
0
0
100
0
Table 2: Aggregate behavior in setting 1. Probability of playing each action as a function
of the signal (ball) received.
In the case of Unanimity, the theory predicts that subjects should always vote blue
when getting a blue signal and mix when getting a red signal. In line with these predictions,
subjects with a blue signal tended to vote their signal: they voted blue above 90% of the
times. When subjects got a red signal, they voted their signal only in 51.48% of the
cases. This percentage is signi…cantly above the predicted value of 23% (Wilcoxon, z =
2.201 p = 0.0277).14 This …nding is consistent with the previous …ndings of Guarnaschelli
et al (2000) and Goeree and Yariv (2011). Several competing explanations can explain
14
In all nonparametric tests we use a matching group as an independent observation.
26
this departure. One potential explanation is given by inserting some noise in individual
behavior. Guarnaschelli et al (2000) shows that quantal response equilibrium can account
for some of the departures from the symmetric Bayesian Nash equilibrium. A second
potential explanation is the existence of a number of “naive subjects”which do not respond
to strategic incentives when choosing how to vote.15
The observed behavior under Majority is substantially di¤erent than under Unanimity.
According to the theoretical predictions, subjects should always vote their signal. We
observe indeed that subjects voted their signal more than 95% of the times with both
signals. Such behavior should also be observed under Veto. We …nd very similar behavior
and no signi…cant di¤erences in the probability of voting the signal (Mann-Whitney, p >
0.10 for both signals). The only di¤erence we …nd is related to the broader action space:
unlike predicted, some subjects used the veto. They did it with very small but strictly
positive probability (0:45% when receiving a blue signal and 2:32% when receiving a red
signal).
6.1.2
Setting 2
In Setting 2, the optimal and equilibrium strategy under Unanimity coincides with naive
voting, i.e. blue subjects voted blue and red subjects voted red. Taking the average
across all groups and periods, we …nd that 97.52% of the ballots were naive. This …nding
holds across groups: there were at least 95.45% of naive ballots in each independent
group. However, we observe a substantial asymmetry across signals: while subjects voted
their signal more than 99.17% of the times when receiving a blue signal, the percentage
decreases to 88.54% for subjects who received a red signal. This di¤erence is signi…cant at
5% (Wilcoxon, z = 2.201 p = 0.0277). Such a departure from theory might be explained
by an aversion of some of the subjects to vetoing an outcome.16
The same predictions hold for Veto: subjects should vote blue when receiving a blue
ball, and use their veto when receiving a red ball. There are however some di¤erences
with respect to Unanimity. Subjects voted signi…cantly less for blue when receiving a blue
15
In our context we de…ne naive subjects as subjects that voted blue when receiving a blue signal and
red when receiving a red signal. See that this behavior has very di¤erent implications under Majority,
Unanimity, and Veto.
16
Note that this is not necessarily in contradiction with the over-vetoing observed with unanimity if the
amount of veto averse subjects is lower than the amount of naive subjects.
27
Unanimity
Majority
Veto
Ball
Blue
Red
Blue
Red
Blue
Red
Blue
99.17
11.46
67.93
2.81
85.95
3.25
Realized
Red
32.07
97.19
12.54
18.39
Veto
0.83
88.54
1.51
78.37
Prediction
Blue Red Veto
100
0
0
100
66
34
0
100
100
0
0
0
0
100
Table 3: Aggregate Voting Behavior in Setting 2.
signal (Mann-Whitney, z = 2.882, p < 0.01) and they vetoed less when receiving a red
signal (Mann-Whitney, z = 2.562, p = 0.01). Again, this di¤erence could be explained
by the aversion of some of the subjects to use their veto power. In contrast to Unanimity,
with Veto subjects can vote for red without having to impose it. This is consistent with
the di¤erence in behavior between Unanimity and Veto when receiving a red ball. Part of
this is corrected by (arguably) very sophisticated subjects which, anticipating this, voted
for red when receiving a blue ball. By doing this they were unlikely to change the result
in the blue state, but could potentially be pivotal in favor of red in the red state.
Finally, under Majority naive voting is no longer an equilibrium in Setting 2. In
equilibrium, subjects should always vote their signal when receiving a red signal and they
should mix when receiving a blue signal. The data again shows strong evidence of strategic
behavior. Subjects voted red more than 97% of the time when receiving a red signal, but
they only voted for blue 67.93% of the times when receiving a blue signal. These are
virtually the theoretical predictions. Bhattacharya et al (2012) …nd a similar …nding in a
setting with asymmetric (but milder) information asymmetry across signals.
6.2
Welfare
In this subsection, we compare the welfare performances of di¤erent voting systems in the
laboratory. We will focus on the concept of Full Information Pareto Dominance. Given
m = 0, the probabilities of making errors are su¢ cient statistics for the Full Information
Pareto Decision. Table 4 displays the errors for each rule and setting, both at the aggregate
level and disaggregated by state.17
17
These mistake rates are calculated from the simulations described in the previous section. We aggregated the outcomes weighted by the respective probabilites.
28
Setting
1
2
Voting
System
U
M
V
U
M
V
Realized
Blue
Aggregate
State
43.76
12.73
14.77
8.80
29.66
11.38
85.28
12.37
18.98
11.94
15.82
16.34
Red
State
2.24
13.08
10.56
5.65
43.49
6.41
Prediction
Blue
Aggregate
State
34.05
9.88
9.88
6.34
28.60
6.34
48.35
9.88
9.88
8.65
16.60
8.65
Red
State
19.74
9.88
9.88
4.04
40.60
4.04
Table 4: Percentage of mistakes for each, rule, setting and state.
As shown in Section 4, Veto should produce no signi…cant di¤erences with the best of
the two other voting systems, and perform strictly better than the worst performing one.
This comparison should hold both across states and in each state. Overall, as predicted,
Veto dominates in both settings. In Setting 1, Veto produces a signi…cantly lower amount
of mistakes than Unanimity (Mann-Whitney, z = 2.882, p < 0.01), while it produces no
signi…cant di¤erences with Majority (Mann-Whitney, z = 0.801, p = 0.42). In Setting
2 instead, Veto produces a signi…cantly lower amount of mistakes than Majority (MannWhitney, z = 2.882, p < 0.01) while it produces no signi…cant di¤erences with Unanimity
(Mann-Whitney, z = 0.961, p = 0.34).
When looking at mistakes conditional on the states, most comparisons are in line with
the theoretical predictions. Yet, we do …nd some discrepancies.18 First, Unanimity does
not produce higher amount of mistakes in both states. The higher than predicted amount
of vetoes that we observed in section 6.1 results in a much lower than optimal amount of
mistakes in state blue. The outcome is that, unlike predicted, Unanimity does produce a
strictly smaller amount of mistakes in the red state (Mann-Whitney, z = 2.882, p < 0.01
for both comparisons). This …nding is in line with previous evidence (see Guarnaschelli
et al. 2000, and Goeree and Yariv 2011). Second, due to a small but positive use of the
veto, Veto produces a strictly higher amount of mistakes than Majority in the blue state.
Finally, in Setting 2, Majority produces a signi…cantly higher amount of mistakes in the
red state but, even if the sign is correct, we …nd no signi…cant di¤erences between Majority
and the other voting systems.
So far we have compared the rules to each others and to their the theoretical predictions
in terms of frequency of mistakes. Mistakes were de…ned with respect to the state of
18
Appendix A5 displays nonparametric tests for all possible comparisons.
29
nature. Another way to assess the performances of the systems is to de…ne mistakes with
respect to the realized type pro…le. That is, we could compare the decision under each
voting system to the decision of a benevolent dictator who observes all signals and whose
goal is to implement the Pareto Criterion. We call the frequency of group decisions that
coincide with the decision of the benevolent dictator for each type pro…les the frequency
of information aggregation.
How can we quantify the frequency of information aggregation? Due to the few observations that we have for some of the signal realizations, we use simulations based on
the aggregate behavior of each independent group.19 First, we compute average behavior
for each independent group in the last 25 periods. We only take the second half to allow
for some learning. Second, for each possible distribution of signals in a group, we run
10,000 simulations to …nd out the expected outcomes. Finally, we pool the results of all
groups belonging to the same treatment and we compare the outcomes to the decision of
the benevolent dictator.
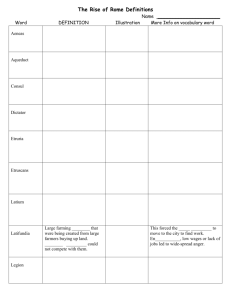
Figure 2: Information aggregation in di¤erent treatments. Each graph corresponds to a
given setting (1 or 2) and a voting rule (U, M or V).
Figure 2 plots the information aggregation obtained with the observed behavior (the
“Realized”curve). Additionally, it includes two benchmarks: the information aggregation
19
For example, in Setting 2, the likelihood of having zero blue balls in the red state in one period is
lower than 0.002%.
30
predicted by the symmetric Bayesian Nash equilibrium (the “Theoretical Nash”curve) and
the information aggregation if subjects had voted naively (the “Naive”curve).20 Figure 2
shows several interesting patterns.
In Setting 1, a benevolent dictator would always choose the color for which the group
received more signals. Hence, Majority and Veto should aggregate information perfectly.
Majority does aggregate information extremely well when most signals are red or when
most signals are blue. However, whenever the number of blue balls is similar to the
number of red balls, slight departures from the predicted behavior can be quite in‡uential
and decrease the frequency of information aggregation. A similar picture holds for Veto,
with the additional feature that, due to some small but positive amount of vetoing, it
aggregates information slightly less than predicted when the number of blue balls is high.
The pattern with Unanimity is also interesting. As shown in Figure 2, the realized
information aggregation is closer to the prediction of naive voting than the prediction of
the symmetric Bayesian Nash equilibrium. By voting naively, subjects trade some extra
information aggregation when there is a low number of blue signals, in exchange for lower
information aggregation when there is a high number of blue signals. This departure is of
course bad in terms of aggregate welfare (as we have seen previously).
In Setting 2, a benevolent dictator would choose blue only if all balls were blue. This
is the reason why both Unanimity and Veto should aggregate information perfectly. The
picture with these two voting systems is very similar. For most of the range they do
aggregate information extremely well, and the only departure arises for a very high number
of blue balls. This departure can be explain by the behavior described in the previous
section: a combination of some aversion to vetoing and some small noise when receiving a
blue signal. Finally, in setting 2 Majority performs closely to the equilibrium prediction.
7
Conclusion
TBW
20
See that in the case of Veto, naive voting is not well-de…ned. As mentioned above, we de…ne naive
voting under Veto as voting for blue (red) when receiving a blue (red) ball (and hence not using the veto).
31
References
[1] Ali, N., Goeree, J., Kartik, N. and T. Palfrey (2008). Information Aggregation in Ad
Hoc and Standing Committees, American Economic Review, Papers & Proceedings,
98(2): 181-186.
[2] Austen-Smith, D.. and J. Banks (1996). Information Aggregation, Rationality, and
the Condorcet Jury Theorem, American Political Science Review, 90: 34–45.
[3] Austen-Smith, D. and T. Feddersen (2006). Deliberation, Preference Uncertainty and
Voting Rules, American Political Science Review, 100(2): 209-217.
[4] Battaglini, M., Morton, R. and T. Palfrey (2008). Information Aggregation and
Strategic Abstention in Large Laboratory Elections, American Economic Review,
Papers & Proceedings, 98(2): 194-200.
[5] Battaglini, M., Morton, R. and T. Palfrey (2010). The Swing Voter’s Curse in the
Laboratory, Review of Economic Studies, 77: 61-89.
[6] Bhattacharya, S., J. Du¤y and S. T. Kim (2012). Compulsory versus Voluntary Voting: An Experimental Study, mimeo.
[7] Blum, Y.Z. (2005). Proposals for UN Security Council Reform, American Journal of
International Law, 99(3): 632–649.
[8] Bouton, L. (2013). A Theory of Strategic Voting in Runo¤ Elections, American Economic Review, 103(4): 1248-1288.
[9] Bouton, L., and M. Castanheira (2012). One Person, Many Votes: Divided Majority
and Information Aggregation, Econometrica, 80(1): 43–87.
[10] Bouton, L., Castanheira, M., and A. Llorente-Saguer (2012). Divided Majority and
Information Aggregation: Theory and Experiment, IED Discussion Paper, 242.
[11] Buchanan, J.M. and Tullock, G. (1962). The Calculus of Consent. Ann Arbor: University of Michigan Press.
[12] Cameron, C.M. (2000). Veto Bargaining: Presidents and the Politics of Negative
Power, Cambridge University Press.
32
[13] Chen, Y. and P. Ordeshook (1998). Veto Games: Spatial Committees under Unanimity
Rule, Public Choice, 97(4): 617-643.
[14] Chwe, M. (1999). Minority Voting Rights Can Maximize Majority Welfare, American
Political Science Review, 93(1): 85-97.
[15] Coughlan, P. (2001). In Defense of Unanimous Jury Verdicts: Mistrials, Communication and Strategic Voting, American Political Science Review, 94: 375-93.
[16] Dougherty, K. and J. Edward (2005). A Nonequilibrium Analysis of Unanimity Rule,
Majority Rule, and Pareto. Economic Inquiry, 43(4): 855-864.
[17] Feddersen, T. and W. Pesendorfer (1996). The Swing Voter’s Curse, American Economic Review, 86: 408-424.
[18] Feddersen, T. and W. Pesendorfer (1997). Voting Behavior and Information Aggregation in Elections with Private Information, Econometrica, 65: 1029-1058.
[19] Feddersen, T. and W. Pesendorfer (1998). Convicting the Innocent: the Inferiority of
Unanimous Jury Verdicts, American Political Science Review, 92: 23-35.
[20] Georges, A. and Romme, L. (2004). Unanimity Rule and Organizational Decision
Making: A Simulation Model, Organization Science, 15(6): 704-718.
[21] Goeree, J. and L. Yariv (2011). An Experimental Study of Collective Deliberation,
Econometrica, 79(3): 893-921.
[22] Groseclose, T. and N. McCarty (2001). The politics of blame: Bargaining before an
audience, American Journal of Political Science, 45(1): 100–119.
[23] Guarnaschelli, S., McKelvey, R., and T. Palfrey (2000). An Experimental Study of
Jury Decision Rules, American Political Science Review, 94(2): 407-423.
[24] Guttman, J. (1998). Unanimity and Majority Rule: the Calculus of Consent Reconsidered, European Journal of Political Economy, 14: 189-207.
[25] McLennan, A. (1998). Consequences of the Condorcet Jury Theorem for Bene…cial
Information Aggregation by Rational Agents, American Political Science Review, 92:
413-418.
33
[26] McMurray, J. (2012). Aggregating Information by Voting: The Wisdom of the Experts
versus the Wisdom of the Masses, Review of Economic Studies, forthcoming.
[27] Myerson, R. (1998). Population Uncertainty and Poisson Games, International Journal of Game Theory, 27: 375-392.
[28] Myerson, R. (2000). Large Poisson Games, Journal of Economic Theory, 94: 7-45.
[29] Myerson, R. (2002). Comparison of Scoring Rules in Poisson Voting Games, Journal
of Economic Theory, 103: 219-251.
[30] Myerson, R. and Weber, Robert (1993). A Theory of Voting Equilibria, American
Political Science Review, 87: 102-114.
[31] Nunnari, S. (2012). Dynamic Legislative Bargaining with Veto Power, mimeo.
[32] Sobel, R. and R. Holcombe (2001). The Unanimous Voting Rule Is Not the Political
Equivalent to Market Exchange, Public Choice, 106: 233-242.
[33] Van Weelden, R. (2008). Deliberation Rules and Voting, Quarterly Journal of Political
Science, 3: 83-88.
[34] Wicksell, K. (1967 [1896]). A New Principle of Just Taxation. In R.A. Musgrave and
A.T. Peacocks (eds.), Classics in the Theory of Public Finance, 72-118. New York:
St. Martin’s Press.
[35] Winter, E. (1996). Voting and Vetoing, American Political Science Review, 4: 813823.
[36] Woods, N. (2000). The Challenge of Good Governance for the IMF and the World
Bank Themselves, World Development, 28(5): 823–841.
34
Appendices
Appendix A1: Proofs of Section 3
First, it is straightforward to see that 1 <
Proof of the Partition in subsection 3.2.
2
< 1:
4
Second, we show that
when
r
(sB ) =
r
= , if
n 1
j
B)
B (1
n 1
j
m
nP1
3 (1
is the value for
3
such that G(vjsR ) = 0
R
(sR ) = 1. It corresponds to:
j= n+12
=
Note that
<
21
j= n+12 m
with
4:
3
nP1
n 1
B
=
3
; and
2
1
(
3)
j
(1
j
) (
j
(1
) (
n+1 m
n 1+m (1
B)
n+1 m
n 1+m
(1
B
n + m = 3, this expression boils down to
(
j
1) (
3
B)
(
1) +
3
1) +
3
2 [0; 1] and
3)
3
1)
3
n 1
B .
=
Then,
3
(
n 1 j
1)
B
B
n 1 j
(
1))
B
= 0 otherwise. Note that when
2
=
3
=
4.
To study cases when n + m > 3, we construct the following function of :
nP1
j= n+12
n 1
B
g( ) =
nP1
j= n+12
It is obvious that
=
4
n 1
B
3
m
n 1
j
j
(1
j
) (
1)
(
1) +
n 1 j
1)
B
B
(9)
m
n 1
j
j
(1
j
) (
1) (
(
1) + (
n 1 j
1))
B
is a zero of this function. First, we point to the fact that g( ) > 0 for all
(observe that the denominator in the RHS of (9) is always strictly larger than the
numerator when n > 3). Second, we show that g( ) < 0 for all
then
(
2:
Note that when
2
= 0: Hence, g( ) < 0 simpli…es to:
n
X1
j= n+12
n
1
j
m
(
j
1) ( (
n 1 j
1))
B
n
X1
n 1
B
<
j= n+12
n
1
j
m
j
(
1)
(
n 1 j
1)
B
;
B
which can be shown to hold term by term. We have:
n
1
j
(
j
1) ( (
n 1 j
1))
B
n 1
B
<
n
1
j
(
j
1)
(
1)
B
n 1 j
;
B
which boils down to:
n j
Since we consider here
equivalently, that
21
n+1 m
n 1+m
2 =
j
n j.
(
B)
n+1 m
n 1+m
<
, it is enough to show that (
1)
R ( B R 1) ;
p (sR j! B ) =
B)
n+1 m
n 1+m
j
(
B)
This last equality is satis…ed since we are considering j
Note the following change of variable: p (sB j! B ) =
( B
j
B:
( B
1)
:
( B R 1)
35
( R 1)
B ( B R 1) ;
p (sB j! R ) =
( R 1)
;
( B R 1)
n
j
. or,
n+1 m
:
2
p (sR j! R ) =
By continuity of g( ), we have that
of Proposition 1 for a proof that
Proof of Proposition 1.
3
2
4,
3
which completes the proof. (See the proof
is unique.)
The proof consists of …ve parts, each corresponding to a part of the
proposition 1.
Part (i):
R
<
1.
For that set of parameter values, we conjecture that the following strategy
pro…le
b
(sB )
=
b
(sR )
=
1;
, and
(sR ) = 1
r
constitute an equilibrium. This requires (i.a) G(bjsB )
(i.d) G(vjsB )
0: From G(bjsB )
satis…ed. From G(vjsR )
;
0; (i.b) G(bjsR ) = 0; (i.c) G(vjsR )
0; and
G(bjsR ) and condition (i.b); we have that (i.a) is necessarily
G(vjsB ) and (i.c), we have that (i.d) is necessarily satis…ed. It remains
to prove that conditions (i.b) and (i.c) are satis…ed.
We start by discussing condition (i.b). From (5) ; we have that G(bjsR ) = 0 if
Pr(! B jsR )
!
b
From (3),
= p (sB j!) +
!B
B
p (sR j!) ; and
!
r
p (sB j! R ) +
p (sB j! B ) +
p (sR j! R )
p (sR j! B )
= (1
and thus
=
p (sB j! B )
(
From (
(
R)
R)
n+1+m
n 1 m
n+1+m
n 1 m
R)
n+1+m
n 1 m
(
R)
1 m
2
n+1+m
n 1 m
p (sR j! R )
1+m
2
;
:
(10)
p (sR j! B )
p (sR j! B ) : This boils down to 1 < (
From p (sB j! B ) > p (sB j! R ), p (sR j! R ) > p (sR j! B ), (
n
p (sR j! R )
p (sR j! B )
p (sB j! R )
> 1 and p (sR j! R ) > p (sR j! B ), we have that
p (sR j! R )
= 0:
) p (sR j!) ; this boils down to
n
p (sR j! B )
=
p (sR j! R )
!R
B
Pr(! R jsR )
R)
R)
< 1 if p (sB j! B ) (
n+1+m
n 1 m
n+1+m
n 1 m
R)
n+1+m
n 1 m
p (sB j! R ) <
, which is always satis…ed.
1, and
R
<
1;
we have that
>0.
We now discuss condition (i.c). From (6) ; we have that G(vjsR )
Pr(! R jsR )
!R
R
Pr(! B jsR )
!B
R
0 if
0:
From (4) ; this boils down to
0
@
R
n
X1
j= n+12
(n 1)!
(
j!(n 1 j)!
m
!R j
b )
(
1
!R n 1 j A
r )
n
X1
j= n+12
(n 1)!
(
j!(n 1 j)!
m
!B j
b )
(
!B n 1 j
r )
:
Comparing the two sides of that inequality term-by-term, we can show that the RHS is always
36
larger than the LHS. In particular, 8j 2 f n+12
R
From
!
b
(n 1)!
(
j!(n 1 j)!
= p (sB j!) +
!R j
b )
(
m
; :::; n
(n 1)!
(
j!(n 1 j)!
!R n 1 j
r )
!
r
p (sR j!), and
1g we have
= (1
!B j
b )
(
!B n 1 j
r )
) p (sR j!) ; this boils down to
j
p (sB j! B ) +
p (sB j! R ) +
R
p (sR j! B )
p (sR j! R )
n
j
:
From G(bjsR ) = 0, we have that
R
Since
2 (0; 1) and
j
n j
=
n+1 m
n 1+m
p (sB j! B ) +
p (sB j! R ) +
>
n 1 m
n+1+m
is satis…ed.
Part (ii): if
R
strategy pro…le
2[
1;
2 ].
p (sR j! B )
p (sR j! R )
8j 2 f n+12
; :::; n
1g; we have that the condition
For that set of parameter values, we conjecture that the following
b
(sB ) = 1; and
r
(sR ) = 1
constitutes an equilibrium. This requires (ii.a) G(bjsB )
and (ii.d) G(vjsB )
m
n 1 m
n+1+m
0: From G(vjsR )
0; (ii.b) G(bjsR )
0, (ii.c) G(vjsR )
G(vjsB ) and (ii.c), we have that (ii.d) is necessarily
satis…ed. It remains to prove that conditions (ii.a), (ii.b), and (ii.c) are satis…ed.
First, we discuss condition (ii.a). From (5) ; we have that G(bjsB )
Pr(! B jsB )
From (3),
!
b
!
r
= p (sB j!) ; and
!B
B
Pr(! R jsB )
n
This is satis…ed i¤
R
2,
!R
B
0 if
0
= p (sR j!) ; this boils down to
p(sB j! B )
p(sB j! R )
p (sB j! R )
p (sB j! B )
1 m
2
n
p (sR j! R )
p (sR j! B )
1+m
2
:
which is satis…ed by assumption in the case under consideration.
Second, we discuss condition (ii.b). From (5) ; we have that G(bjsR )
Pr(! B jsR )
From (3) and
!
b
= p (sB j!) ; and
!
r
!B
B
Pr(! R jsR )
This is satis…ed i¤
R
1,
!R
B
0 if
0
= p (sR j!) ; this boils down to
n
p (sR j! B )
p (sR j! R )
0;
p (sB j! R )
p (sB j! B )
1 m
2
n
p (sR j! R )
p (sR j! B )
which is satis…ed by assumption.
37
1+m
2
:
Finally, we discuss condition (ii.c). From (6) ; we have that G(vjsR )
!R
R
Pr(! R jsR )
Pr(! B jsR )
!B
R
0 if
0:
From (4) ; this boils down to
0
p (sR j! R ) @
p (sR j! B )
n
X1
j= n+12
(n 1)!
(
j!(n 1 j)!
m
!R j
b )
(
1
n
X1
!R n 1 j A
r )
(n 1)!
(
j!(n 1 j)!
m
j= n+12
!B j
b )
(
!B n 1 j
r )
Comparing the two sides of that inequality term-by-term, we can show that the RHS is always
larger than the LHS. In particular, 8j 2 f n+12
R
From
!
b
(n 1)!
(
j!(n 1 j)!
!
r
= p (sB j!) and
!R j
b )
m
; :::; n
(n 1)!
(
j!(n 1 j)!
!R n 1 j
r )
(
1g we have
B
R
> 1; and
1g; we have that this is satis…ed.
R
strategy pro…le
2(
2;
3 ].
!B n 1 j
r )
:
(
n+1 m
n 1+m
. From R ( B )
B)
j
n+1 m
n+1 m
; :::; n
n j
n 1+m 8j 2 f
2
n
j
For that set of parameter values, we conjecture that the following
b
(sB )
=
1
r
(sR )
=
1.
constitutes an equilibrium for some
(iii.c) G(vjsR )
(
j
= p (sR j!) ; this boils down to
(by assumption in the case under consideration);
Part (iii):
!B j
b )
; and
r
(sB ) =
;
2 (0; 1): This requires (iii.a) G(bjsB ) = 0, (iii.b) G(bjsR )
0; and (iii.d) G(bjsB )
G(vjsB ). From G(vjsR )
have that (iii.d) is necessarily satis…ed. From G(bjsR )
0,
G(vjsB ), (iii.a) and (iii.c); we
G(bjsB ) and (iii.a), we have that (iii.b) is
necessarily satis…ed. It remains to prove that conditions (iii.a) and (iii.c) are satis…ed.
First, we discuss condition (iii.a). From (5) ; we have that G(bjsB ) = 0 if
Pr(! B jsB )
!
b
From (3),
= p (sB j!) (1
!
r
) ; and
!B
B
=
n
B
=
p (sB j! R ) (1
p (sB j! B ) (1
3)
Pr(! R jsB )
1 m
2
n
3 p (sB j! R )
+ p (sR j! R )
p
(s
j!
)
3
B B + p (sR j! B )
and thus to
=
(
From (
B)
n+1 m
n 1+m
p (sB j! B )
B)
= 0:
p (sB j!) + p (sR j!) ; this boils down to
3)
p (sR j! R )
!R
B
n+1 m
n 1+m
(
B)
n+1 m
n 1+m
p (sB j! B )
38
B)
;
:
p (sB j! R )
p (sB j! R ) > 0; we have that
assumption in the case under consideration. From (
p (sR j! B )
1+m
2
> 0 i¤
n+1 m
n 1+m
R
>
2,
which is satis…ed by
> 1 and p (sR j! R )
p (sR j! B ) =
:
p (sB j! B )
p (sB j! R ) ; we have that
< 1:
Second, we discuss condition (iii.c). From (6) ; we have that G(vjsR )
From (4),
!
b
Pr(! R jsR )
!R
R
Pr(! B jsR )
!
r
=
p (sB j!) + p (sR j!) ; this boils down to
= p (sB j!) (1
) and
!B
R
0 if
0:
R
3,
which is satis…ed by assumption in the case under consideration.
Part (iv):
R
strategy pro…le
with
2(
3;
2 (0; 1) and
4 ].
For that set of parameter values, we conjecture that the following
b
(sB )
=
1
; and
r
(sB ) =
r
(sR )
=
1
; and
v
(sR ) =
2 (0; 1
:
), constitutes an equilibrium: This requires (iv.a) G(bjsB ) = 0,
(iv.b) G(vjsR ) = 0, (iv.c) G(bjsB )
G(vjsB ); and (iv.d) G(vjsR )
G(bjsR ): From G(vjsR )
G(vjsB ), (iv.a), and (iv.b), condition (iv.c) is necessarily satis…ed. From G(bjsB )
G(bjsR );
(iv.a), and (iv.b), condition (iv.d) is necessarily satis…ed. It remains to prove that conditions (iv.a)
and (iv.b) are satis…ed.
First, we discuss condition (iv.a). From (5) ; we have that G(bjsB ) = 0 if
Pr(! B jsB )
From (3),
!
b
= (1
) p (sB j!) ; and
n
(1
(1
) p (sB j! R )
) p (sB j! B )
!
r
1 m
2
!B
B
=
p (sB j!) + (1
1
n
Since
1
=
p (sR j! R )
(
=0
) p (sR j!) ; this boils down to
p (sB j! R ) + (1
p (sB j! B ) + (1
and thus to
=
!R
B
Pr(! R jsB )
B)
(
n+1 m
n 1+m
; we have from part (iii) that
B)
n+1 m
n 1+m
p (sB j! B )
1
assumption in the case under consideration.
) p (sR j! R )
) p (sR j! B )
p (sR j! B )
1+m
2
=
:
p (sB j! R )
2 (0; 1) i¤
R
>(
B)
n+1 m
n 1+m
Second, we discuss condition (iv.b). From (6) ; we have that G(vjsR ) = 0 if
Pr(! R jsR )
!R
R
Pr(! B jsR )
39
B;
!B
R
= 0:
which is true by
!
b
From (4),
R
=
= (1
nP1
(n 1)!
j!(n 1 j)!
j= n+12 m
nP1
j= n+12
!
r
) p (sB j!) ; and
=
p (sB j!) + (1
j
((1
) p (sB j! B )) (
) p (sR j!) ; this boils down to
n 1 j
p (sB j! B ) + (1
) p (sR j! B ))
:
m
(n 1)!
j!(n 1 j)!
j
((1
) p (sB j! R )) (
n 1 j
p (sB j! R ) + (1
) p (sR j! R ))
or22
R
Pn
1
n 1
j
j= n+12 m
n 1
B
Pn
1
(1
and hence
.
m
Finally, it remains to show that
requires
=
R
Pn
n 1
B
(1
1
j= n+12
Pn
m
)
n 1
j
j= n+12
This implicitly de…nes
j
(1
+ (1
j
)
and
(
)
+ (1
R
(
1)
B ( R 1)
)
n 1
j
(1
1
n 1
j
(1
j
n 1 j
)) ( (1
))
j
(1
))
n
X1
=
n
1
j
n 1+m
2
2j+m (n 1)
1
n 1
j
(1
j= n+12 m
1
)
The …rst exponent is strictly positive if j >
n+1 m
.
2
(
1
1+
1+
B
R
1
R
(
B
B(
6
4
Therefore the function is monotonic in
we have:
n 1 j
1)
1
1)
R 1)
1 m
2
))
4,
R
n 1 j
=1
n
( (1
))
1+m
2
,
, we can rearrange this condition as follows:
2
n 1 m
2
(1
Since G(bjsB ) = 0
2
n
n 1 m
2
= 1:
R.
when
R
n 1 j
)) ( (1
Dividing both the numerator and the denominator by (1
and given that j
n 1 j
are uniquely de…ned for every
2 [0; 1] is uniquely de…ned by
j= n+12 m
n 1 j
B
), where
(1
1)
1
B
R
R
1+
n 1
B
(
1
1+
B
R
R
(
1)
1
n 1 j
1)
B ( R 1)
1
n 1 j
B
3
7
5= 0
(11)
which is the case since the summation starts at
, which ensures single crossing and uniqueness
over the domain.
The expression between square brackets is always negative for j >
n 1 m
2
(this comes from G(bjsB ) = 0 and
of playing v (when
4 ).
R
n 1 m
2
and null if j =
Since the LHS of equation (11) is the gain
< 1), we have that the gain of playing v is strictly decreasing in : We can
also see that it is increasing in
R;
and equal to 0 in f
that the gain of playing v is also equal to 0 when f
there exist a unique
3
such that for all
3
<
R
<
R
4
R
=
=
3;
= 0g: From part (v), we have
4;
= 1g. Together, this implies that
there is a unique 0 <
< 1 such that both
G(bjsB ) = 0 and G(vjsR ) = 0.
Part (v): if
R
4.
For that set of parameter values, we conjecture that the following
strategy pro…le
b
22
(sB ) = 1 and
Note the following change of variable: p (sB j! B ) =
( B
1)
R ( B R 1) ;
p (sR j! B ) =
( B
1)
:
( B R 1)
40
v
(sR ) = 1;
( R 1)
B ( B R 1) ;
p (sB j! R ) =
( R 1)
;
( B R 1)
p (sR j! R ) =
constitutes an equilibrium. This requires (v.a) G(bjsB )
G(bjsR )
G(vjsR ); and (v.d) G(vjsR )
0, (v.b) G(bjsB )
0:
First, we discuss condition (v.a). From (5) ; we have that G(bjsB )
Pr(! B jsB )
From
!
r
= 0 8!; we have
!
B
Pr(! B jsB )
!B
B
G(vjsB ); (v.c)
!B
B
Pr(! R jsB )
!R
B
0 if
0:
= 0 8!; and thus this is satis…ed.
Second, we discuss condition (v.b). From (5) and (6) ; we have that G(bjsB )
From
!
r
Pr(! R jsB )
!R
B
!R
R
Pr(! R jsB )
= 0 8!; (3) and (4) ; this boils down to (
n
B)
Pr(! B jsB )
From
!
r
!B
B
Pr(! R jsR )
!R
B
!R
R
Pr(! R jsR )
= 0 8!; (3) and (4) ; this boils down to
4,
R
!B
R :
1, which is always satis…ed.
Third, we discuss condition (v.c). From (5) and (6) ; we have that G(bjsR )
Pr(! B jsR )
G(vjsB ) if
Pr(! B jsR )
G(vjsR ) if
!B
R :
which is satis…ed by assumption in the
case under consideration.
Finally, we discuss condition (v.d). From (5) ; we have that G(vjsR )
Pr(! R jsR )
From (4),
!
b
= p (sB j!) and
!
r
!R
R
Pr(! B jsR )
= 0; this boils down to
!B
R
0:
4,
R
0 if
which is satis…ed by assumption
in the case under consideration.
Proof of Proposition 2. First notice that, for m > n
!
B
= 0 and
!
R
! n 1
v)
= (1
1:
m
8!; m
This has two direct implications. First, G(bjs) = 0 8s. Second, sR agents must play veto with
positive probability in equilibrium otherwise . The rest of the proof is in two parts. Each part
corresponds to one part of the proposition.
Part (i):
strategy pro…le
R
2 (1;
4 ):
For that set of parameter values, we conjecture that the following
b
(sB )
=
1
r
(sR )
= ' ; and
v
(sR ) = 1
' :
with ' 2 (0; 1), constitute an equilibrium. This requires (i.A) G(bjsB )
(i.C) G(bjsB )
G(vjsB ); and (i.D) G(vjsR )
is necessarily satis…ed: From G(vjsR )
0, (i.B) G(vjsR ) = 0,
G(bjsR ): From G(bjs) = 0 8s, condition (i.A)
G(vjsB ); (i.A), and (i.B), condition (i.C) is necessarily
41
satis…ed. From G(bjs) = 0 8s; and (i.B), condition (i.D) is necessarily satis…ed. It remains to
prove that condition (i.B) is satis…ed.
From (6) ; we have that G(vjsR ) = 0 if
!R
R
Pr(! R jsR )
From (4),
!
b
!
r
= p (sB j!) ;
Pr(! B jsR )
!
v
= ' p (sR j!), and
R
= (1
and thus
p (sB j! B )
(
From (
R)
1
n
1
p (sB j! B ) (
> 1; we have that (
R)
1
n
1
R)
R)
1
n
1
n
1
p (sR j! B ) > p (sB j! B )
R
4:
(
R)
n
1
' ) p (sR j!) ; this boils down to
R)
1
n
1
p (sR j! R )
1
p (sR j! R )
in the case under consideration. From (
Part (ii):
(
p (sB j! R ) : This boils down to
1
= 0:
p (sB j! B ) + ' p (sR j! B )
p (sB j! R ) + ' p (sR j! R )
=
' =
!B
R
R)
1
n
1
n 1
;
p (sB j! R )
:
p (sR j! B )
p (sR j! B ) > 0: Therefore, we have ' > 0 i¤
R
<(
n 1
B)
; which is satis…ed by assumption
> 1; we also have that (
p (sB j! R ) ; and thus that ' < 1:
b
(sB ) = 1, and
v
(sR ) = 1;
constitutes an equilibrium. We just need to prove that
G(vjsB )
First, we show that G(vjsB )
= p (sB j!) ;
!
r
0
G(vjsR ):
0: From (6) ; we have that this is true if
Pr(! R jsB )
!
b
= 0, and
!
v
!R
R
Pr(! B jsB )
!B
R
0:
= p (sR j!) ; this boils down to
(
n
B)
1;
which is always true.
Second, we show that G(vjsR )
0: From (6) ; we have that this is true if
Pr(! R jsR )
From (4),
!
b
1
n
1
p (sR j! R )
For that set of parameter values, we conjecture that the following strategy
pro…le
From (4),
R)
= p (sB j!) ;
!
r
= 0, and
!
v
!R
R
Pr(! B jsR )
!B
R
0:
= p (sR j!) ; this boils down to
R
(
n 1
B)
42
;
which is satis…ed by assumption in the case under consideration.
Appendix A2: Other Equilibrium under Veto
In this Appendix, we prove that there exists another equilibrium under Veto that is identical to
the unique equilibrium under Unanimity:
Proposition 3 The following strategy pro…le is a responsive symmetric equilibrium under Veto:
(i) if
<
R
with
=
then
p(sB j! B ) (
(
(ii) if
4,
R
R
)n
4,
1
1
R)
n
1
1
b
(sB )
=
b
(sR )
=
p(sB j! R )
p(sR j! R ) p(sR j! B )
1;
, and
v
(sR ) = 1
(sB ) = 1, and
v
(sR ) = 1:
.
2 (0; 1) :
then
b
Proof. The proof is in 2 parts. Each part corresponds to one part of the proposition.
Part (i):
R
<
4.
The conjectured equilibrium requires (i.a.) G(bjsB )
G(vjsB ), and (i.c.) G(bjsR ) = G(vjsR )
0: Since G(vjsR )
0, (i.b.) G(bjsB )
G(vjsB ) and G(bjsB )
G(bjsR ); we
have that (i.b.) is necessarily satis…ed when the other conditions are satis…ed.
!B
B
From (5) ; we have that (i.a.) holds if Pr(! B jsB )
s
r
is satis…ed since
= 0 8s implies
!
B
= 0 8!.
Pr(! R jsB )
!R
B
0. This last inequality
From (5) and (6) ; we have that G(bjsR ) = G(vjsR ) if
Pr(! B jsR )
Since
s
r
!B
B
!R
B
Pr(! R jsR )
B jsR )
= 0 8s; this boils down to Pr(!
Pr(! R jsR ) =
= Pr(! R jsR )
!R
R
!B
B
!R
R
Pr(! B jsR )
s
b
. From (4) and
can rewrite this equation as
R
Solving for
p (sB j! B ) +
p (sB j! R ) +
=
= r (sB js) +
r (sR js) ; we
n 1
:
, we get
=
p (sB j! B )
(
Part (ii):
7.1
p (sR j! B )
p (sR j! R )
!B
R :
R
4.
R)
1
n
1
(
R)
1
n
p (sR j! R )
1
p (sB j! R )
:
p (sR j! B )
This case has already been proven in propositions 1 and 2.
Appendix A3: Proof of Section 4
Proof of Theorem 1.
43
(12)
We have to show that no agent zk would be worse o¤ under the considered voting system than
under SQ.
1. Veto interim Pareto dominates Status Quo.
Observe that, under Veto, for all
R , B ,m,n:
(a)
b
(sB ) > 0; and (b)
v
(tR ) = 1:
Given (b), whenever there is an agent of type tR , the group decision is R, and the outcome are
identical under V and SQ. We can thus focus on cases where there are no agents of this type.
Given (a) above, under V , there is a positive probability that the group decision is B. Therefore,
agents tB are strictly better o¤ than under SQ; since the outcome is always R but they prefer B.
Finally, we consider the case of common value agents. Let us assume that agents sB is better
o¤ under SQ than under V . That is U (V; sB ) < U (SQ; sB ). But then (a) cannot be part of an
equilibrium strategy. This is because this agent could achieve a strictly higher level of expected
utility by choosing
v
(sB ) = 1. This would implement the same outcome as under SQ indeed. A
similar argument holds for agents agents sR , whenever
v (sR )
v (sR )
< 1. When
n 1
B ,
R
we have
= 1. But again, this still means that they cannot be worse o¤ under V , than under SQ.
2. Unanimity interim Pareto dominates Status Quo.
Observe that, under Unanimity, for all
R , B ,m,n:
(a)
b
(sB ) = 1; and (b)
v
(tR ) = 1:
Therefore, the same reasoning as in point 1 (for Veto) applies to Unanimity.
3. Majority does not interim Pareto dominates Status Quo.
Observe that, under Majority, for all
R , B ,m,n:
(a)
b
(sB ) = 1; and (b)
b
(tB ) = 1:
Given (a) and (b), for the group decision to be B, one just needs that there be a majority of
agents of either type sB or tB . Since there exist strategy pro…les with such a majority and at least
one agent tR in the group, and since any agent tR is strictly worse o¤ if the group decision is B
(rather than R, under SQ), Majority does not interim Pareto dominate the SQ. Note that for an
obvious similar argument, SQ does not interim Pareto dominate M either.
Proof of Theorem 2. In this proof, we focus on the equilibrium characterized in Propositions
1 and 2. There are two interesting cases depending on lim mi .
i !1
Case 1: lim mi = 1. Let’s miR denote the (random) number of tR agents out of mi . See
i !1
that Pr (miR > 0) = 1
mi
. Given,
2 (0; 1), we have that lim Pr (miR > 0) = 1. This implies
i !1
that Veto and Unanimity are equivalent in this case (R is the decision with a probability that tends
to 1 when lim Ni = 1):
i !1
Case 2: lim mi = m < 1. This implies that lim ni = 1. In that case, whenever miR > 0,
i !1
i !1
Veto and Unanimity are equivalent (see previous case). But see that with a probability that tends
to
m
> 0, there are no tR agents (i.e. miR = 0). Therefore, it is left to show that conditional
on miR = 0, Veto IP Dominates Unanimity. There are two subcases to discuss: (i) miB = m = 0,
and (ii) miB = m > 0:
Subcase (i): miB = m = 0. Under voting system
Us ( ) =
Pr (! B js) Pr(Rj! B ; s; )
44
, the interim utility of a s agent is:
Pr (! R js) Pr(Bj! R ; s; ); 8s;
;
where Pr(Rj! B ; s; ;
tem
) is the probability that R is selected in state ! B ; under voting sys;
; for the associated equilibrium strategy pro…le
;
(Pr(Bj! R ; s; ;
from the perspective of a s agent
) is de…ned similarly).
V;
From Theorem 4, we have that, when miB = m = 0; lim Pr(Rj! B ; sB ; V;
lim Pr(Bj! R ; sB ; V;
V;
i !1
i !1
) = 0 =
) in the equilibrium characterized in Proposition 1. Since p (! B js) and
p (! R js) are strictly larger than 0; it remains to prove that, under Unanimity, lim Pr(Rj! B ; sB ; U;
Pr(Bj! R ; sB ; U;
U;
U;
) > 0 and lim Pr(Rj! B ; sR ; U;
i !1
i !1
U;
) + Pr(Bj! R ; sR ; U;
U;
)+
) > 0. Given the
indi¤erence of sR agents between voting b and v; the latter condition is necessarily satis…ed (indeed,
by voting v; a sR agent ensures that the probability of mistake is Pr (! B jsR ) > 0). Therefore, we
only show the detail of the former condition.
U
b
From Pr (Bj!; sB ; U ) =
and
U
b
n 1
!;U
b
(sB )
, Pr Rj!; sB ; U;
U;
= 1
U
b
!;U
b
(sB )
n 1
;
(sB ) = 1; we have that
lim Pr(Rj! B ; sB ; U;
U;
i !1
U;
) + Pr(Bj! R ; sB ; U;
From Proposition 4 (given that
(
R
i !1
n 1
B)
p (sB j! B )
p (sB j! B ) + p (sR j! B )
i !1
+ p (sB j! R ) + p (sR j! R )
(
R)
p (sB j! B )
(
R)
ni 1
! R ;U
b;i
+
ni 1
:
is necessarily satis…ed when n ! 1), this boils
down to
lim 1
! B ;U
b;i
) = lim 1
1
n
1
(
n
1
p (sR j! R )
n
1
(
R)
1
n
p (sR j! R )
1
1
R)
1
p (sB j! R )
p (sR j! B )
!ni 1
p (sB j! R )
!ni
1
(13)
p (sR j! B )
We can prove that
lim
i !1
p (sB j! B ) + p (sR j! B )
p (sB j! B )
(
R)
1
n
1
(
R)
1
n
1
p (sR j! R )
p (sB j! R )
!ni
p (sB j! R )
!ni
p (sR j! B )
1
=
p (sR j! B )
p (sR j! R )
=
p (sR j! B )
p (sR j! R )
p(sR j! B )
p(sR j! R ) p(sR j! B )
;
and
lim
i !1
p (sB j! R ) + p (sR j! R )
p (sB j! B )
(
R)
1
n
1
(
R)
1
n
1
p (sR j! R )
p (sR j! B )
1
p(sR j! R )
p(sR j! R ) p(sR j! B )
Therefore, (13) boils down to
1
Given that
p(sR j! B )
p(sR j! R )
p (sR j! B )
p (sR j! R )
p(sR j! B )
p(sR j! R ) p(sR j! B )
< 1; we have that
and thus that
p(sR j! B )
p(sR j! R )
lim Pr(Rj! B ; sB ; U;
i !1
+
U;
p (sR j! B )
p (sR j! R )
p(sR j! R )
p(sR j! R ) p(sR j! B )
p(sR j! R )
p(sR j! R ) p(sR j! B )
) + Pr(Bj! R ; sB ; U;
45
<
U;
p(sR j! B )
p(sR j! R )
) > 0:
:
p(sR j! B )
p(sR j! R ) p(sR j! B )
:
This shows that, in the case under consideration (i.e. all voters are common value), Veto IP
Dominates Unanimity.
Subcase (ii): miB = m > 0. For the common value voters, the proof is similar to the one in
subcase (i). It remains to prove that the tB agents are weakly better o¤ under Veto. To do so,
we need to prove that, when lim Ni = 1, the probability that B is selected under Unanimity
i !1
is weakly smaller than under Veto. Indeed, the expected utility of a tB agent depends on the
probability that B is selected, whatever the state. Therefore, we need to show that
lim Pr Bj! B ; tB ; U;
U;
U;
+Pr Bj! R ; tB ; U;
Ni !1
From Theorem 4, we have that the RHS equals 1 (indeed,
lim Pr Bj! R ; tB ; V;
Ni !1
! R ;U
b
is equal to lim
i !1
V;
ni
! B ;U
b
+
i !1
From Proposition 4 (given that
(
R
ni
lim
n 1
B)
p (sB j! R ) + p (sR j! R )
+ p (sB j! B ) + p (sR j! B )
! B ;U
b
+
Ni !1
=
!;U
b
= 1 and
n
; we have that the LHS
p (sB j! B )
(
R)
1
n
1
p (sB j! B )
(
ni
1:
is necessarily satis…ed when n ! 1), this boils
down to
i !1
(14)
V;
. Therefore, condition (14) boils down to:
! R ;U
b
lim
+Pr Bj! R ; tB ; V;
lim Pr Bj! B ; tB ; V;
U;
= 0): From Pr Bj!; tB ; U;
ni
V;
lim Pr Bj! B ; tB ; V;
Ni !1
R)
1
n
1
(
n
R)
1
p (sR j! R )
(
R)
1
n
1
p (sR j! R )
1
p (sB j! R )
!ni
p (sR j! B )
!ni
p (sB j! R )
(15)
1:
p (sR j! B )
We can prove that
lim
i !1
p (sB j! R ) + p (sR j! R )
p (sB j! B )
(
R)
1
n
1
(
R)
1
n
1
p (sR j! R )
p (sB j! R )
!ni
p (sB j! R )
!ni
p (sR j! B )
=
p (sR j! B )
p (sR j! R )
=
p (sR j! B )
p (sR j! R )
p(sR j! R )
p(sR j! R ) p(sR j! B )
;
and
lim
i !1
p (sB j! B ) + p (sR j! B )
p (sB j! B )
(
R)
1
n
1
(
R)
1
n
1
p (sR j! R )
p (sR j! B )
p(sR j! B )
p(sR j! R ) p(sR j! B )
Therefore, we have that condition 15 boils down to
(
where
R
=(
R)
1
R)
1
1
R
+(
2 (0; 1) :
Notice that the LHS is equal to 1 for
R
R)
1
R
R
1,
(16)
= 0. Therefore it is su¢ cient that the LHS is
46
:
V;
:
decreasing in
R.
The derivative of the LHS is equal to
@ (
R)
1
1
R
@
Given (
R)
1
R
R
> 0 and (1
+(
R)
R
R
=
(
R)
1
R
R
[2
2
R)
2x
x+2 ;
2
R
(1
R
2
We know that ln(x + 1)
1
+ (1 +
R ) ln
R]
2
R)
> 0, it is enough to show that
2
for x
R
+ (1 +
R ) ln
R
0: Thus, if x =
< 0:
R
1
0, we have ln
2(
R
R
1)
R +1
:
Therefore, we have that condition 16 is always satis…ed.
Proof of Theorem 3. We prove that (i) for some values of the parameters, Veto reproduces the
outcome of the best performing system between Unanimity and Majority, and (ii) for other values
of the parameters, Veto performs strictly better than both Unanimity and Majority.
1. Weak FIPD.
The strategy of this part of the proof is to look at the outcome that the three systems produce
for all possible realized type pro…les in the group of agents. We divide the proof in two parts: (i)
there is at least one tR agent (i.e. mR > 0), and (ii) there is no tR agent (i.e. mR = 0). This refers
to the the realization of the random variables "number of tR agents" and "number of tB agents".
(i) if mR > 0:
Since tR agents vote v under both V and U , we have that these two systems implement the
D
F IP C
with probability 1. Under M; v is not available. Therefore, M does not implement the
D
F IP C
with probability 1 (except if all voters vote r with probability 1, but then M performs very
poorly when mR = 0).
(ii) mR = 0:
First, notice that mR = 0 implies that 8z; DF IP C (z; ! B ) = B and DF IP C (z; ! R ) = R:
Second, given that tB always play b, the subgame where mR = 0, and mB = m corresponds to
a pure common value game where m votes for b are added to those of the common value agents.
Third, from McLennan (1998), we know that in pure common-value games, the strategy pro…le
that maximize the expected utility of the common value agents is an equilibrium.
Fourth, notice that the action set in U and M is a strict subset of the action set under V .
Therefore, any expected outcome under U and M can be reproduced under V . From McLennan
(1998), this implies that the maximal equilibrium utility of common value agents under V is greater
than or equal to the maximal equilibrium utility of common value agents under U and M .
Fifth, notice that common value agents behave as if mR = 0, under both V and U (see Section
3.2 for more details), but not under M . That is, the equilibria we have identi…ed for V and U
maximizes common value agents’ expected utility exactly in the subgame where mR = 0, and
mB = m. Given that the disutility of both type of errors is identical for common value agents,
this is equivalent to maximizing the probability that R is chosen in state ! R and B is chosen in
47
! B when mR = 0 and mB = m: Under M; this is not true because there are pivotal events for
which mR > 0: Common value agents thus have to infer the number of tR and tB conditional on
being pivotal.
2. Strict FIPD.
It remains to show that there are values of the parameters such that Veto FIP dominates both
Unanimity and Majority. To do this, we only need to …nd a numerical example. In this part of
the proof, we focus on the equilibrium characterized in Propositions 1 and 2.
Consider the case in which N = n = 9, p (sB j! B ) = 0:9, p (sR j! R ) = 0:3. Given m = 0, we
need to show that Veto is strictly more likely to choose B in ! B and R in ! R than both Unanimity
and Majority. We denote by Pr(Rj! B ; ;
under voting system
;
) the probability that R is selected in state ! B ;
; for the associated equilibrium strategy pro…le
;
(Pr(Bj! R ; ;
is de…ned similarly). The probability of implementing the FIP Criterion under rule
1
2
Pr(Rj! B ; ;
;
;
) + Pr(Bj! R ; ;
V;
r
with
= 0:1426,
(sB )
(sR )
)
is 1
) .
From Proposition 1, we have that under Veto there exists an equilibrium
V;
b
;
=
=
1
1
; and
, and
V;
r
V;
v
;V
such that
(sB ) =
(sR ) =
,
= 0:5346. In that equilibrium; the probabilities of mistakes are
Pr(Rj! B ; V;
V;
) = 0:3986 and Pr(Bj! R ; V;
V;
) = 0:1904;
)
= 0:7055
and thus the probability of implementing the Pareto criterion is
1
1
Pr(Rj! B ; V;
2
V;
) + Pr(Bj! R ; V;
V;
Under Unanimity, we have from Proposition 4 that the unique symmetric responsive equilibrium
with
;U
is such that
U;
b
(sB )
=
U;
b
(sR )
=
1;
, and
U;
v
(sR ) = 1
;
= 0:3971: In that equilibrium the probabilities of mistakes are
Pr(Rj! B ; U;
U;
) = 0:4286 and Pr(Bj! R ; U;
U;
) = 0:166;
and thus the probability of implementing the Pareto criterion is
1
1
Pr(Rj! B ; U;
2
U;
) + Pr(Bj! R ; U;
Hence, Veto performs strictly better than Unanimity.
48
U;
)
= 0:7027
It is easy to show that Veto also strictly FIP Dominates Majority in when
>
R
(as in this
3
example). Indeed, for those values of the parameters, all equilibria under Veto are such that v is
played with positive probability. In other words, all equilibria under Veto are di¤erent from those
under Majority. Therefore, the the maximal equilibrium utility under Veto must be higher than
under Majority.
Proof of Theorem 4. In this proof, we focus on the equilibrium characterized in Propositions
1 and 2. There are two interesting cases depending on lim mi .
i !1
Case 1: lim mi = 1. Let’s miR denote the (random) number of tR agents out of mi . See
i !1
mi
that Pr (miR > 0) = 1
. Given,
2 (0; 1), we have that lim Pr (miR > 0) = 1. Given that
i !1
tR agents vote v under Veto, we have that Veto implements the FIP Criterion with a probability
that tends to 1 when lim mi = 1:
i !1
Case 2: lim mi = m < 1. This implies that lim ni = 1. In that case, whenever miR > 0,
i !1
i !1
the tR agents vote v and the FIP Criterion is implemented. But see that with a probability
that tends to
m
> 0, there are no tR agent. Therefore, it is left to show that conditional on
miR = 0, the probability of implementing the FIP Criterion also converges to 1. In that case, the
FIP Criterion is that R is chosen in state ! R and B is chosen in state ! B : For the probability
of implementing the FIP Criterion to converge to 1, we have that, by the law of large number, a
necessary and a su¢ cient condition is
!B
b
where
!
a
lim
i !1
!
a;i
!B
r ;
>
and
!
v;i
and that 9{ such that
!R
b
<
!R
r
(17)
= 0 8i > {.
Consider the equilibrium characterized in Proposition 1. When Ni ! 1; the only possible
cases are (i), (ii), and (iii). Indeed, from
3;
4
possible.
Subcase (i):
R
< lim (
i !1
B)
ni 1 mi
ni +1+mi
!
Ni !1
=
1i .
1; we have that cases (iv) and (v) are not
First notice that we know from the proof of
Proposition 1, that the following condition must be satis…ed in the limit:
R
Let
1
= lim
!R !R
r
b .
1
i !1
1;i .
If
Therefore,
is such that
!R
b
>
1
= lim
i !1
is such that
!B
b
!R
b
!R
r
ni
1 mi
2
(and thus
ni
!B
b
!R
b
!B
b
!B
r
ni
!B
r
!R
r
!B
b
>
this case equation (17) must be satis…ed.
Since
ni 1 mi
ni +1+mi
1i = lim ( B )
i !1
ni 1 mi
mi
lim ni +1+mi = lim nnii +11+m
i
i !1
i !1
(and thus
1+mi
2
ni
!B
r
!R
r
1+mi
2
:
!R
b
<
(18)
!R
r ),
!B !B
r
b
we have that
>
! 0; and hence equality (18) cannot hold. If
i!1
!B
r ),
1; and hence equality (18) cannot hold, as
Subcase (ii):
1 mi
2
we have that
lim ni 12 mi
i !1
R
lim (
i !1
=
!R
b
!B
b
ni
i
lim ni 1+m
2
i !1
B)
ni +1 mi
ni 1+mi
= 1, this case is possible only if
(17) must be satis…ed for the equilibrium strategy in Proposition 1.
49
1 mi
2
=
!R
r
!B
r
ni
1+mi
2
!
i !1
= 1. Therefore, in
2i
R
=
B:
Given
R
=
B,
Subcase (iii):
2i
= lim (
B)
i !1
ni +1 mi
ni 1+mi
R
We know from the proof of Proposition 1, that the following condition must be satis…ed in
equilibrium in the limit:
B
Let
3
= lim
i !1
!R !R
r
b :
3;i .
Therefore,
is such that
!R
b
>
If
3
!R
b
!B
b
!R
r
= lim
i !1
is such that
ni
1 mi
2
(and thus
!B
b
!B
r
<
ni
!R
r
!B
r
!B
b
ni
!R
b
!B
b
1 mi
2
!R
r
!B
r
1+mi
2
(19)
!B !B
r
b
>
! 0; and hence equality (19) cannot hold. If
3
(and thus
1+mi
2
ni
!R
b
!R
r ),
<
we have that
i!1
!B
r ),
>
we have that
!R
b
!B
b
ni
1 mi
2
!R
r
!B
r
ni
1+mi
2
! 1;
i!1
and hence equality (19) cannot hold. Therefore, it must be that condition (17) holds.
7.2
Appendix A4: Unanimity
In this appendix, we characterize the unique responsive equilibrium under Unanimity. Doing so, we
extend the equilibrium characterization in Feddersen and Pesendorfer (1998) to biased information
structure and the presence of private value voters.
7.2.1
Pivot Probabilities and Expected Payo¤s
Under Unanimity, a vote for v is pivotal if and only if, without that vote, the group decision is
B but, with that vote, it becomes R. This happens when no other agent is casting a v-vote (i.e.
xv = 0). In this case, we say that the vote is pivotal in favor of R: As we do under Veto, we denote
!
: The probability of that event depends on expected vote shares, which
this event in state ! by pivR
in turn depends on the state of the world and agent strategies. We denote
!
R
the probability to
be pivotal in favor of R in state !. Formally:
!
R
!
Pr(pivR
)
=
Pr(xv = 0j!)
=
Pr(xv = 0j!; mR = 0) Pr(mR = 0j!)
The second inequality follows from the fact that tR agents always vote v under veto. We thus have
!
R
=(
! n 1
b)
m
(20)
Under Unanimity, a vote for b cannot be pivotal. Indeed, there is no combination of other
agents’vote such that the decision is R without this vote and becomes B with it. In fact, either
xv > 0 and the “current” outcome can no longer be changed, or xv = 0, which implies xb =
N
1 > xr = 0, and the “current” outcome is B. Finally, a vote for b cannot be pivotal in favor
of R as it is a vote against R. Remember that r is not an available action under Unanimity.
50
From (1) ; we have that the expected payo¤ of actions v for an agent with signal s is
G(vjs) =
1
Pr(! R js)
2
1
Pr(! B js)
2
!R
R
!B
R ;
(21)
and the expected payo¤ of actions b for an agent with signal s is
G(bjs) = 0:
(22)
As mentioned in Section 2, private value agents have a weakly dominant strategy under each
voting system. Under Unanimity, b weakly dominates v for tB agents; whereas v weakly dominates
b for tR agents. The next subsection focuses on the voting behavior of common value agents.
7.2.2
Equilibrium Voting Behavior
The following proposition extends the equilibrium characterization in Feddersen and Pesendorfer
(1998) to possible biased information structure and the presence of private value voters.
Proposition 4 The following strategy pro…le is the unique responsive symmetric equilibrium under
Unanimity:
(i) if
R
with
<
=
4;
p(sB j! B ) (
(
(ii)
R
R,
4
then
)n
1
1
then
R)
n
1
1
U
b
(sB )
=
U
b
(sR )
=
p(sB j! R )
p(sR j! R ) p(sR j! B )
1;
, and
U
v
(sR ) = 1
(sB ) = 1, and
U
v
(sR ) = 1:
:
2 [0; 1).
U
b
Proof. The proof is in two parts. First, we characterize the equilibrium when
Second, we characterize the equilibrium when (
n 1
B)
<
R:
R
(
n 1
B)
:
Proving uniqueness is tedious but
straightforward. We therefore omit the details of that part.
Part (i): if
R
<
4:
For that set of parameter values, we conjecture that the following
strategy pro…le
with
=
p(sB j! B ) (
(
n
R)
1
1
R)
n
1
1
U
b
(sB )
=
U
b
(sR )
=
p(sB j! R )
1;
, and
U
v
(sR ) = 1
; constitutes an equilibrium.
p(sR j! R ) p(sR j! B )
51
;
This requires (i.a) G(vjsB )
0; and (i.b) G(vjsR ) = 0: From G(vjsB )
G(vjsR ) and (i.a); we
have that condition (i.b) is necessarily satis…ed. From (21) ; we have that (i.a) is satis…ed when:
!R
R
Pr(! R js)
!
b
From (20) ; and
= p(sB j!) +
!B
R
Pr(! B js)
= 0:
p(sR j!); this boils down to
p(sB j! B ) +
p(sB j! R ) +
n 1
p(sR j! B )
p(sR j! R )
=
R:
Therefore, we have that
=
p(sB j! B )
(
From (
p(sB j! B )
R)
(
1
n
> 1; we have that (
1
R)
R)
1
n
1
1
n
1
n
p(sR j! B ) > p(sB j! B )
4
1
n
1
1
p(sB j! R )
p(sR j! R )
(
R.
R)
1
n
1
R)
1
n
1
:
p(sR j! B )
p(sR j! B ) > 0: Therefore,
p(sB j! R ) > 0; which boils down to
in the case under consideration). From (
Part (ii):
R)
p(sR j! R )
1
R)
(
R
<(
n 1
B)
(satis…ed by assumption
> 1; we also have that (
p(sB j! R ): Therefore
< 1:
(sB ) = 1, and
(sR ) = 1:
> 0 i¤
R)
1
n
1
p(sR j! R )
For that set of parameter values, we conjecture that the following strategy
pro…le
b
v
constitutes an equilibrium. This requires (ii.a) G(vjsB )
0; and (ii.b) G(vjsR )
0:
First, we discuss condition (ii.a). From (21) ; we have that condition (ii.a) is satis…ed if
Pr(! R jsB )
From (20) ; and
!
b
!R
R
Pr(! B jsB )
!B
R
0:
= p(sB j!); this boils down to
(
n
B)
1;
which is always satis…ed.
Second, we discuss condition (ii.b) From (21) ; we have that condition (ii.b) is satis…ed if
Pr(! R jsR )
From (20) ; and
!
b
!R
R
Pr(! B jsR )
!B
R
0:
= p (sB j!) ; this boils down to
(
R
n 1
B)
;
which is satis…ed by assumption in the case under consideration.
The intuition is easier to grasp by …rst explaining why and when sB -agents voting b and sR agents voting v is not an equilibrium (i.e.
R
<
52
4 ).
Consider an agent who receives signal sR .
She believes, but is not sure, that R is a better decision than B. When deciding which vote to cast,
she only focuses on situations in which her vote is pivotal. Under Unanimity, this only happens
!
when all other agents vote for b (event pivR
). If sB -agents voting b and sR -agents voting v, this
happens if all other agents have received a signal sB , which is more likely to happen in state ! B
than in state ! R : As long as the precision of the sR signal is not too high (i.e.
event (n
R
<
4 ),
the joint
1 sB -signals and 1 sR -signal) is also more likely in state ! B than in state ! R . She is
thus better of overlooking her signal and voting for b. Therefore, sB -agents voting b and sR -agents
voting v cannot be an equilibrium in this case.
To understand why the equilibrium is in mixed strategies when
R
<
4,
notice that when
sR -agents mix between b and v; the information content conditional on being pivotal decreases
(since sR -agents also vote b with positive probability, the fact of being pivotal no longer hinges
on all other agents having received sB -signals; hence, the posterior probability of being in state
! B when being pivotal decreases). For
b
(sR ) large enough, this information content is too low
to convince sR -agents to overlook their signal. The equilibrium corresponds to the case where the
posterior probability of being in either state is equal, which makes agents indi¤erent between the
two actions.
For
R
4,
the precision of the sR signal is so high that a sR -agent remains convinced that
state ! R is more likely when all other agents received a sB -signal. In other words, a single sR
signal would su¢ ce to convince an agent, that could obverse the n signals and could decide for the
group, to choose decision R. Hence, sB -agents voting b and sR -agents voting v is an equilibrium.
Note that there is always a n su¢ ciently large such that this case does not arise.
53
Appendix A5: Non-Parametric Tests
Realized
Setting
Comparison
1
U vs V
Aggregate
Blue State
z = 2.882
>
>
p = 0.0039
U vs M
>
p = 0.0039
M vs V
<
p = 0.4233
2
U vs V
=
p = 0.3367
U vs M
=
p = 0.0039
M vs V
=
z = 0.480
z = 1.441
=
p = 0.0039
z = 0.320
p = 0.7488
z = 1.121
p = 0.2623
=
z = 1.121
p = 0.2623
<
p = 0.1495
z = 2.882
>
z = 2.242
z = 2.882
p = 0.0039
p = 0.6310
z = 2.882
<
<
p = 0.0250
z = 0.961
=
z = 2.882
z = 2.882
p = 0.0039
p = 0.0039
z = 0.801
=
<
p = 0.0039
z = 2.882
>
z = 2.882
Red State
z = 2.882
p = 0.0039
>
z = 2.882
p = 0.0039
Table A1. Mann-Whitney tests for comparisons in the amount of mistakes.
Appendix A6: Instructions
Thank you for taking part in this experiment. Please read these instructions very carefully. It is
important that you do not talk to other participants during the entire experiment. In case you do
not understand some parts of the experiment, please read through these instructions again. If you
have further questions after hearing the instructions, please give us a sign by raising your hand out
of your cubicle. We will then approach you in order to answer your questions personally. Please
do not ask anything aloud.
During this experiment you will earn money. How much you earn depends partly on your
own decisions, partly on the decisions of other participants, and partly on chance. Your personal
earnings will be paid to you in cash as soon as the experiment is over. Your payo¤s during the
experiment will be indicated in Talers. At the end of the instructions we are going to explain you
how we are going to transform them into euros.
After the experiment, we will ask you to complete a short questionnaire, which we need for
the statistical analysis of the experimental data. The data of the questionnaire, as well as all your
decisions during the experiments will be anonymous.
The experiment you are participating in is a group decision making experiment. The experiment consists of 50 rounds. The rules are the same for all rounds and for all participants. At
the beginning of each round you will be randomly assigned to a group of 9 participants (including
yourself). You will not know the identity of the other participants. In each round you will only
interact with the participants in your group. Your group will make a decision based on the vote of
all group members. (important to say this here, because we say “before voting”later) The decision
is simply a choice between two jars, the blue jar and the red jar. In what follows we will explain
to you the procedure in each round.
54
The Jar. There are two jars: the blue jar and the red jar. The blue jar contains 7 blue balls
and 3 red balls. The red jar contains 7 red balls and 3 blue balls. At the beginning of each round,
one of the two jars will be randomly selected. We will call this the selected jar. Each jar is equally
likely to be selected, i.e., each jar is selected with a 50% chance. You will not be told which jar
has been chosen when making your decision.
The Sample Ball. Before voting, each of you receives a piece of information that may or may
not help you decide which is the correct jar. After a jar is selected for your group, the computer
will show each of the participants in your group (including yourself) the color of one ball randomly
drawn from that jar. We will call this ball your sample ball. Since you are 9 in your group, the
computer separately performs this random draw 9 times. Each ball will be equally likely to be
drawn for every member of the group. That is, if the color of the selected jar for your group were
red, then all members of your group would draw their sample balls from a jar containing 7 red
and 3 blue balls. If the color of your group’s jar were blue, then all members of your group would
draw their sample balls from a jar containing 3 red and 7 blue balls. Therefore, if the selected jar
is blue, each member of your group has a 70% chance of receiving a blue ball. And if the selected
jar is red, each member of your group has a 70% chance of receiving a red ball.
You will only see the color of your own sample ball. This will be the only information you will
have when you vote.
Your Vote. Once you have seen the color of your sample ball, you can vote.
[Treatment U & M] You must vote for one of the two jars. That is, you must vote for Blue or
vote for Red.
[Treatment V] You must either vote for one of the two jars or veto the blue jar. That is, you
must vote for Blue, vote for Red or Veto Blue.
You can vote for either option by clicking below the corresponding button. After making your
decision, please press the ‘OK’key.
Group Decision. The group decision will be set according to. . .
[Treatment U] . . . unanimity. If you or anyone in your group votes red, the group decision is
red. Otherwise, the group decision is blue. That is, the group decision is blue if and only if you
and everybody in your group vote blue.
[Treatment M] . . . majority. The group decision depends on the number of blue and red votes:
If a majority of the group votes blue, the group decision is blue.
Otherwise, if a majority of the group votes red, the group decision is red.
[Treatment V] . . . majority rule with veto. If you or anyone in your group vetoes blue, the
group decision is red. In case there is no one who vetoes blue the group decision depends on the
number of blue and red votes:
If a majority of the group votes blue, the group decision is blue.
Otherwise, if a majority of the group votes red, the group decision is red.
Payo¤ in Each Round. If your group decision is equal to the correct jar, each member of
your group earns 100 Talers. If your group decision is incorrect, each member of your group earns
10 Talers.
Information at the end of each Round. Once you and all the other participants have
made your choices, the round will be over. At the end of each round, you will receive the following
information about the round:
Total number of votes for Blue
Total number of votes for Red
[Treatment V] Total number of vetoes on blue
Group decision
Selected jar
55
Your payo¤
Final Earnings. At the end of the experiment, the computer will randomly select 5 rounds
and you will earn the payo¤s you obtained in these rounds. Each of the 50 rounds has the same
chance of being selected. The total number of talers accumulated in these 5 selected rounds will
be transformed into euros by multiplying your earnings in talers by a conversion rate. For this
experiment the conversion rate is 0.025, meaning that 100 talers equal 2.5 Euros. Additionally,
you will earn a show-up fee of 3.00 Euros. Everyone will be paid in private and you are under no
obligation to tell others how much you earned.
56